无轴承永磁同步电动机的原理及实现
无轴承永磁同步电机研究现状与发展趋势
Z ej n 10 3 hn ) hni g2 2 1 ,C ia a
Abtat er ges e ae t ge sn ho osm t P M) i ahg ef mac MS s c:A bai l r n n man t yc rnu oo r n s pm r( MS s ihpr r n eP M o
微 电机
无 轴 承 永 磁 同步 电机 研 究 现 状 与 发 展 趋 势
成秋 良,朱烷秋 ,王成 波 ,王海涛
( 江苏大学 电气信息工程学院 ,镇江 2 2 1 ) 10 3
摘
要 :无轴承永磁 同步电机同时具备永磁 同步电机的优 良特性与磁悬浮轴承 的特点。分析 了国内外
无轴承永磁 同步 电机研 究现状 ,指 出其发展规律 ;总结 了目前 国内外无轴承永磁 同步 电机结构与控制 策略方面的研 究成果 ,为其结构改进 与控制优化提供 参考 ;分析 了无轴承永磁 同步电机发展趋势 ,为
a o tn e rn l s e h oo y, a a h x eln h r c e sis o MS a d t e fau e fma - d p i g b a ge stc n l g i nd h st e e c le tc a a tr tc fP M n h e tr s o g i n tc b a n . Ba e n t e meh d o o u n ttsis, a ay e n e n t n la d do si e e r h ei e r g i s d o h t o fd c me tsaitc n lz d it r ai a n me tc r s a c o
对 I E /E lc o i Lba ( E ) 据 库 , E E IE Eet nc i r I L 数 r ry 20 ( 括 20 0 7年 包 0 7年 ) 之前 的检索结 果进 行 了统计
单相交流永磁同步电机工作原理及结构
单相交流永磁同步电机工作原理及结构
单相交流永磁同步电机是一种利用单相交流电源驱动,通过永磁体和交流电源的磁场作用实现转子转动的电机。
工作原理:
1. 永磁体磁场产生:单相交流永磁同步电机的永磁体通常采用稀土永磁材料,如钕铁硼磁铁。
永磁体通过磁化工艺形成一个稳定的磁场,产生的磁场不受外部电源的影响。
2. 驱动电源提供旋转磁场:单相交流电源通过特殊的电路将输入电压分成两个90度相位差的信号,一个信号用于驱动电机的发动机(即线圈),另一个信号与永磁体磁场产生的磁场之间产生相对转位的磁场。
这样就形成了一个旋转磁场,作用于电机的转子。
3. 磁场作用于转子:由于电机的转子上装有永磁体,当旋转磁场作用于转子时,转子受到电磁力的作用,开始旋转。
结构:
单相交流永磁同步电机由永磁体、转子、定子、定子线圈和电机外壳组成。
1. 永磁体:永磁体通常采用钕铁硼等稀土磁材料,产生一个稳定的磁场。
2. 转子:转子是电机的旋转部分,通常由永磁体和轴承组成。
当旋转磁场作用于转子时,转子会受到电磁力的作用,开始转动。
3. 定子:定子是电机的静止部分,通常由定子铁心和定子线圈组成。
定子线圈根据特定的绕组方式连接到电源,产生的磁场与转子磁场相互作用,实现转矩的传递。
4. 电机外壳:电机外壳是保护电机内部部件的外部结构,同时也可以起到散热和隔离的作用。
以上就是单相交流永磁同步电机的工作原理及结构。
它具有结构简单、体积小、效率高、输出功率稳定等特点,在家电、办公设备、工业自动化等领域得到广泛应用。
无轴承电机研究回顾_应用现状与技术基础
无轴承电机研究回顾、应用现状与技术基础收稿日期:2009212231基金项目:南京信息职业技术学院科研项目(07-001)张汉年1,刘合祥2(1.南京信息职业技术学院电子信息学院,南京 210046;2.东南大学电气工程学院,南京 210096)摘 要:概述了无轴承电机的优点,总结了无轴承电机的几种基本结构,详细介绍其研究进程。
综述了无轴承电机的应用现状,重点论述了其在生物工程、半导体工业、食品化工以及飞轮储能等领域的应用概况。
最后总结了无轴承电机及其驱动控制的相关技术基础。
关键词:无轴承电机;研究;应用;技术基础中图分类号:T M 35919 文献标志码:A 文章编号:100126848(2010)0720081204R esearch R eview ,App lica tions Sta tus and T echnology Bases of B ea r i n glessM otorsZ HA NG H an 2n i a n 1,LI U H e 2xiang2(1.Sc hool of E lectronic a nd Infor ma tion,Na njing Colle ge of Infor ma tion te chnology ,N anjing 210046,China;2.Sc hool o f E lectric a l Eng i n eering,Southe a st Unive rsit y ,Nanjing 210096,China )Abstr act :The advantages and the basic str uctures of beari n glessmotors were summarized ,moreover ,pres 2ented the deve lopments of research i n deta i.l I n add ition ,the applicati o n fields of bear i n gless motors were discussed,such as b i o logic engi n eer i n g ,se m iconductor industri e s ,f ood che m ical engi n eering ,fly whee l ener gy storage ,and so on .I n the end ,so me re lated technologies of beari n gless motor drives were over 2vie wed .K ey W ords :Bearingless motors ;Research ;Applications ;Technol o gy bases0 引 言20世纪中期以来,在离心机、高速机床等众多场合迫切需要高速及超高速的电力传动。
交流永磁电机工作原理

交流永磁电机工作原理
永磁电机是一种利用永磁材料产生的磁场与电流相互作用来实现机械能转换的电动机。
它的工作原理可以简单描述为以下几个步骤:
1. 磁场形成:在永磁电机的定子上,通过将直流电流通入定子绕组,产生一个稳定的磁场。
这个磁场是由永磁材料提供的,因此它可以长时间保持不变。
2. 磁场感应:永磁电机的转子安装有绕组,当定子磁场与转子绕组产生磁场感应时,会生成感应电动势。
这个感应电动势会导致转子绕组内产生电流。
3. 电流与磁场相互作用:通过电流和磁场的相互作用,产生一个转矩。
这个转矩会导致转子开始旋转。
4. 磁场改变:随着转子的旋转,磁场的方向也会发生变化,在每个磁极附近,磁场方向会反向。
这样的反向变化会产生一个周期性变化的转矩,使转子得以持续运动。
5. 输入电流调节:为了控制永磁电机的速度和转矩,需要通过调节输入电流来改变定子磁场的强度。
通过适当的输入电流,可以实现永磁电机在不同工况下的运行。
总结起来,永磁电机工作的关键在于通过与定子磁场感应的感应电动势来产生一个旋转转矩,从而实现机械能的转换。
通过
调节输入电流,可以控制电机的转速和转矩,适应不同的工作需求。
无轴承永磁同步电动机悬浮力的前馈解耦控制方法

在 同步旋 转 d g坐标 下 , 面 式无 轴 承 永磁 同 步 、 表
电 动
机 悬 浮 力
交叉耦合关系 , 严重时会导致转子悬浮失败 , 因此无 轴承 电机永 磁 同步 电动机 的解 耦控 制是 实现 其稳 定
悬浮 和 调速 运行 的关 键环 节 。
迄 今 有关 无 轴承永 磁 同步 电动 机悬 浮力 的解耦 方法 , 一种 是 采用 完 全 依 赖 于被 控 电机 精 确 模 型 的 解 析逆 系统 方 法 J该 方 法 仅 能 实 现 近 似 解 耦 , , 对 电机参 数 变化 和 负 载扰 动 的鲁 棒 性 较 差 ; 一 种 是 另
0引 言
无 轴 承永 磁 同步 电动机 将用 于产 生径 向悬 浮力 的悬 浮绕 组和 普通 永磁 同步 电动 机 固有 的转矩 绕组
起叠 放 在定 子 中 , 而 实现 转 子 的稳 定 悬 浮 和 电 从 磁 转矩 输 出 【2。无 轴 承永 磁 同步 电 动机 具 有 高转 1] -
; i使 得转 矩和 悬 浮 力 之 间存 在 耦 合 , 外 相互 垂 直 此
j 的两悬浮力分量也通过各 自的控制 电流 i i形成 交叉耦合 , 消除上述多变量 之间的耦合关系是实现
j 电机稳 定悬 浮 的前提 。 当 电机 转子 偏 心 时 , 转子 上会 产生 单 边 磁拉 力
间以及 悬浮力和 电磁转矩之 间的解耦 控制是提高其系统性能 的关键 。建立 了无轴 承永磁 同步 电动机耦合 的悬浮力 模 型 , 出了一种前 馈解 耦方法 , 提 设计 了前馈 解耦 控制器 , 将之 串接于悬浮 子系统 中, 实现 了上 述多变量之 间的完全
解耦 , 进行 了控制系统 的仿真研究 。仿 真结果证实 了控制方案 的可行性 , 控制系统具有优 良的动 、 静态调节性能 。
表贴式永磁同步电动机的典型结构和工作原理

表贴式永磁同步电动机是一种广泛应用于各种电动车辆和工业设备中的电机类型。
它以其高效率、高功率密度和良好的动态特性而备受关注。
本文将介绍表贴式永磁同步电动机的典型结构和工作原理,帮助读者更好地理解和应用这一先进的电机技术。
一、电机结构1. 定子结构表贴式永磁同步电动机的定子结构采用传统的三相绕组,通常由三个对称分布的线圈组成。
这些线圈沿着定子的内部表面环绕,形成一个均匀的环形结构。
定子绕组中的导线经过绝缘处理,以防止电流泄漏和相互短路。
2. 转子结构表贴式永磁同步电动机的转子结构是其独特之处。
与传统的感应电动机不同,表贴式永磁同步电动机的转子上装有一组稀土永磁体,这些永磁体以特定的方式粘贴在转子表面上,形成了一个永磁转子。
这种设计使得电机具有更高的磁场密度和更强的磁场稳定性。
3. 轴承和冷却系统为了保证电机的稳定运行和可靠性,表贴式永磁同步电动机通常配备有高精度的轴承系统,以减少转子与定子之间的摩擦耗损。
电机还需要一个有效的冷却系统,以控制电机温度并防止过热损坏。
二、工作原理1. 磁场生成当三相交流电源施加在定子绕组上时,会产生一个旋转磁场。
这个旋转磁场会与转子上的永磁体相互作用,导致转子上的永磁体产生一个旋转磁场。
这个旋转磁场会导致转子产生转矩,驱动电机运转。
2. 同步运行由于转子上的永磁体与定子上的旋转磁场同步运行,因此这种电机被称为同步电机。
同步电机的运行速度与供电频率的倍数成正比,因此在工业应用中通常需要配合变频器等调速设备进行匹配使用。
3. 控制技术为了实现精准的转矩控制和速度调节,表贴式永磁同步电动机通常需要配合先进的电机控制技术。
磁场定向控制、矢量控制等技术可以有效地优化电机的性能,并保证其在不同工况下的稳定运行。
以上就是表贴式永磁同步电动机的典型结构和工作原理的介绍。
这种电机类型在电动汽车、轨道交通、工业机械等领域有着广泛的应用前景。
随着先进材料和电机控制技术的不断发展,表贴式永磁同步电动机必将在未来发挥越来越重要的作用。
永磁同步发电机的工作原理
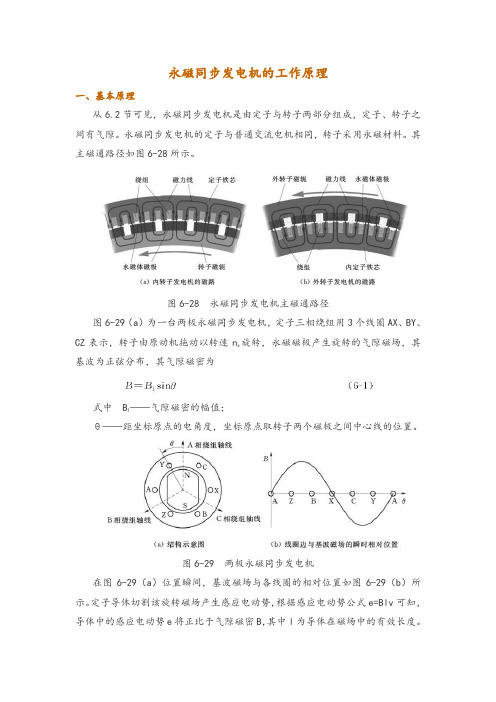
永磁同步发电机的工作原理一、基本原理从6.2节可见,永磁同步发电机是由定子与转子两部分组成,定子、转子之间有气隙。
永磁同步发电机的定子与普通交流电机相同,转子采用永磁材料。
其主磁通路径如图6-28所示。
图6-28 永磁同步发电机主磁通路径图6-29(a)为一台两极永磁同步发电机,定子三相绕组用3个线圈AX、BY、旋转,永磁磁极产生旋转的气隙磁场,其CZ表示,转子由原动机拖动以转速ns基波为正弦分布,其气隙磁密为——气隙磁密的幅值;式中B1θ——距坐标原点的电角度,坐标原点取转子两个磁极之间中心线的位置。
图6-29 两极永磁同步发电机在图6-29(a)位置瞬间,基波磁场与各线圈的相对位置如图6-29(b)所示。
定子导体切割该旋转磁场产生感应电动势,根据感应电动势公式e=Blv可知,导体中的感应电动势e将正比于气隙磁密B,其中l为导体在磁场中的有效长度。
基波磁场旋转时,磁场与导体间产生相对运动且在不同瞬间磁场以不同的气隙磁密B切割导体,在导体中感应出与磁密成正比的感应电动势。
设导体切割N极磁场时感应电动势为正,切割S极磁场时感应电动势为负,则导体内感应电动势是一个交流电动势。
对于A相绕组,线圈的两个导体边相互串联,其产生的感应电动势大小相等,方向相反,为一个线圈边内感应电动势的2倍(短距绕组需要乘短距系数,见第3章)。
将转子的转速用每秒钟内转过的电弧度ω表示,ω称为角频率。
在时间0~t内,主极磁场转过的电角度θ=ωt,则A相绕组的感应电动势瞬时值为——感应电动势的有效值。
式中E1三相对称情况下,B、C相绕组的感应电动势大小与A相相等,相位分别滞后于A相绕组的感应电动势120°和240°电角度,即可以看出,永磁磁场在三相对称绕组中产生三相对称感应电动势。
关于定子绕组中感应电动势的详细计算可参照第2章。
导体中感应电动势的频率与转子的转速和极对数有关。
若电机为两极电机,周,则导体中电动势交转子转1周,感应电动势交变1次,设转子每分钟转ns/60。
无轴承电机的结构设计说明

. . . .毕业设计报告(论文)课题名称无轴承电机的结构设计专业机电学生学号指导教师王起讫日期2011年5月--2011年11月设计地点摘要为了减小磁轴承电机的轴向长度、提高临界转速、缩小系统体积和提高系统的可靠性,实现磁轴承的集成化、小型化,本文针对无轴承电机的一种新型的永磁偏置径向轴向磁轴承进行了初步的研究。
在我们日常生活中精密数控机床、涡轮分子泵、小型发电机或高速飞轮储能等装备中需要用大功率的高速超高速电动机(以下简称为电机)来驱动。
我们知道,电机高速运转对机械轴承振动冲击大,机械轴承磨损快,大幅度缩短了轴承和电机使用寿命,为此用机械轴承来支承高速电机严重制约着电机向更高速度和更大功率方向发展。
近 20 多年来发展起来的磁轴承( Magnetic Bearing ) ,是利用磁场力将转子悬浮于空间,实现转子和定子之间没有机械接触的一种新型高性能轴承。
经过这次毕业设计,我的收获不小。
由于本次设计的无轴承电机是较先进的机电一体化产品,运用到控制理论、电磁学理论、电子理论、机械设计等许多方面的知识,涉与面很广。
因此,通过一次设计,不仅巩固了本专业的基础知识,并且学到了许多有关电子信息方面的知识,兼培养了自己的综合设计能力。
由于本人水平有限,时间仓促,文中难免有错误和不足之处,敬请老师与同学谅解并予以指正。
目录第一章11.1 无轴承电机的研究意义与现状11、无轴承电机的研究意义12、无轴承电机的研究现状32.1 无轴承电机的发展状况32.2 无轴承电机的关键技术的研究现状32.3 无轴承电机的应用现状4第二章机械结构的设计52.1 引言52.2 无轴承电机的系统设计51、转轴部件主要结构尺寸的设计62、主轴上零件的布置62.3无轴承电机的总体结构设计72.4 无轴承电机主要零部件的结构设计71、无轴承电机磁悬浮轴承总体结构设计82、永磁偏置径向轴向磁轴承的总体结构设计82.5 无轴承电机的主要零件结构设计101、电磁轴承的定子与转子102、传感器支架与其基准环103、缸筒124、转轴13第三章磁悬浮轴承的工作原理143.1 引言143.2 磁轴承的组成151、磁轴承的机械系统152、磁轴承的偏磁回路153、磁轴承的控制回路163.1 控制器163.2 功率放大器163.3 传感器163.3 磁轴承的基本工作原理171、永磁偏置径向轴向磁轴承的基本结构和工作原理18 第四章结论21致21第一章1.1 无轴承电机的研究意义与现状1、无轴承电机的研究意义一些精密数控机床、涡轮分子泵、小型发电机或高速飞轮储能等装备中需要用大功率的高速超高速电动机(以下简称为电机)来驱动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
采用 i1d=0 控制的无轴承永磁同步电动机矢量
控制框图如图 2 所示。
图 2 无轴承永磁同步电动机控制系统原理图
Fig.2 Control system block diagram of bearingless permanent magnet synchronous motor
3 控制系统硬件设计
转矩绕组在 i1d=0 控制下的数学模型为
转矩电流分量
i1q
=
Te p1ψ f
(6)
励磁电流分量
i1d=0
在此基础上,悬浮绕组数学模型为
(7)
F Mx =f m( i2dψ f + ψ m1qi2 q)
(8)
F My = − fm( i2 qψ f −ψ m1qi2d)
(9)
式中 ψf——永磁体磁链
无轴承永磁同步电动机的气隙磁场是由转矩 绕组气隙磁场与悬浮绕组产生的磁场在气隙中叠 加而成,因此总气隙磁场磁感应强度[2,4]
B(ϕ) = Bˆ1 cos( p1ϕ − ω1t + µ) + Bˆ2 cos( p2ϕ − ω1t + λ) (1)
式中 下标 1——转矩绕组 下标 2——磁悬浮绕组 ϕ——空间位置角 µ,λ——初始相角 ω1——转矩绕组电流角频率
关键词:无轴承 永磁同步电动机 DSP 控制 悬浮 中图分类号:TM341
Principle and Realization of Bearingless Permanent Magnet Synchronous Motor
Qiu Zhijian Deng Zhiquan Yan Yangguang (Nanjing University of Aeronautics and Astronautics Nanjing 210016 China) Abstract The bearingless permanent magnet synchronous motor is a new type bearingless motor to which the bearingless technique is applied. The rudimental principles and basic characteristics of the bearingless permanent magnet synchronous motor are presented. In the paper, an experimental platform of digital control system for real-time control is designed on double-DSP(TMS320LF2407A). And the design scheme of the software and hardware is also introduced in detail. The results from the experiments of a surface-mounted permanent magnet-type prototype machine demonstrated the good performance of the suspension. Keywords:Bearingless,permanent magnet synchronous motor,DSP control,levitation
2004 年 1 1 月 第 19 卷第 11 期
电工技术学报
TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY
Vol.19 No.11 Nov. 2004
无轴承永磁同步电动机的原理及实现
仇志坚 邓智泉 严仰光
(南京航空航天大学自动化学院电气工程系 南京 210016)
永磁电机的应用范围极为广泛,几乎遍及航空 航天,国防,工农业生产和日常生活的各个领域。 将无轴承技术运用到普通永磁同步电动机上不仅 可以进一步拓展无轴承电机的理论和应用范围,而 且可以充分发挥永磁同步电动机控制方便、结构简 单、效率高、功率密度大的长处。
无轴承电机自身的结构特点决定了它是一个 较普通电机更为复杂的非线性系统,电机的转矩控 制和悬浮力控制之间存在复杂的强耦合关系。因
DSP 数字控制器、两套电流跟踪 PWM 型逆变器 (CRPWM)电路板和各种传感器。
力的 CPU 内核结合在一起,是一种实现无轴承电机 控制的理想控制器。图 4 是采用双 DSP 控制的电路 框图。
对于无轴承永磁同步电动机系统而言,能否实
现电磁转矩和悬浮力之间的解耦控制,关键要看转
矩绕组转子磁场定向是否精确。所以要实现电动机
摘要 无轴承永磁同步电动机是将无轴承技术运用到永磁同步电动机上的新型无轴承电动 机。本文阐述了永磁同步电动机无轴承技术的工作原理,设计和实现了该电动机基于 LF2407A 数 字控制的硬件实验平台和软件系统。通过对整个无轴承永磁同步电动机系统的实验调试,成功实 现了无轴承永磁同步电动机转轴的稳定悬浮。
2 无轴承永磁同步电动机悬浮机理及其数 学模型
2.1 悬浮机理 无轴承电机的定子中有两套不同极对数的绕
组,转矩绕组(极对数 p1)用来产生电磁转矩,悬 浮绕组(极对数 p2)用来产生可控的悬浮力。当极 对数满足 p2=p1±1 时,电机中才能产生可控的悬浮 力[3~5]。悬浮控制绕组的引入,打破了电机原旋转 磁场的平衡,使得电机某一区域中气隙磁场增强, 而其空间对称区域气隙磁场减弱,则转轴受到的磁 张力(即麦克思韦力)将指向磁场增强的一方。如 图 1a 所示的无轴承表面永磁同步电动机(p1=2, p2=1)两个磁场的相互调制使得转子左右侧气隙磁 通密度不均匀,其结果产生的麦克思韦合力(即径 向悬浮力)指向 X 轴的正方向,转轴将向右偏移; 图 1b 中两个磁场的作用产生了沿 Y 轴正方向的悬 浮力。如果能检测转子径向位移偏离量,来调节悬 浮绕组的电流,就可以改变可控悬浮力的大小与方 向,实现电动机转子的稳定悬浮。 2.2 数学模型
国家自然科学基金资助项目(59977009)。 收稿日期 2004-02-12 改稿日期 2004-07-26
磁轴承结构和交流电机定子结构的相似性,把产生 悬浮力的绕组叠绕在原来普通电机定子绕组中,这 样它不仅继承了传统磁轴承电机的优点,而且不占 用额外的轴向空间,电机体积和重量可以设计得非 常小,可靠性高,还可突破更高转速和大功率的限 制,因而在很大程度上拓宽了高速电机在大功率和 超高转速领域中的应用[1,2]。
则麦克斯韦力在 X、Y 轴上的分量为
FMx
=
lrπBˆ1Bˆ 2 2µ0
cos(λ
−
µ)
(2)
图 1 悬浮力产生原理图 Fig.1 Principle of radial force production
FMy
=
lrπBˆ1Bˆ 2 2µ 0
sin(λ − µ)
(3)
在同步旋转坐标系下,将麦克斯韦力用 d、q 坐标轴上的各分量表达(电机的三相/二相变换采用 功率不变变换)
4 控制系统软件设计
考虑到本系统中悬浮控制过程的复杂性,因此 本实验平台的控制系统软件全部采用汇编语言模 块化编程。这不仅提高了 DSP 的运行效率,而且增 加了程序的通用性和可移植性,有利于系统的维护 和改进。
图 5 为无轴承永磁同步电动机程序流程图,运 算和控制环节都是在各自的周期定时中断服务子 程序中完成,控制周期设置为 0.0625ms。转矩绕组 DSP 主要完成无轴承永磁同步电动机的 i1d=0 控制,
Lm2——悬浮绕组互感 is2d,is2q——悬浮绕组电流在 d、q 轴下的分量
10
电工技术学报
2004 年 11 月
从上式可知,无轴承表面永磁同步电动机的电
磁转矩控制和悬浮力控制相互耦合,当采用 i1d=0 控制时,能够实现电磁转矩控制与悬浮控制的解耦,
同时也能准确、有效地控制悬浮力大小和方向[6~8]。
图 5 无轴承永磁同步电动机程序流程图 Fig.5 Flow chart of computer program
软件主要由主程序、周期定时中断服务子程序以及 捕获中断服务子程序组成。首先利用捕获单元中的 正交解码电路检测转子实际转速 nr 和转角θr,通过
12
电工技术学报
2004 年 11 月
时处理复杂解耦运算的能力。本文采用的两片 TMS320LF2407A 芯片是数字电机控制(DMC)专
图 3 是无轴承永磁同步电动机硬件控制系统框 用数字信号处理芯片,它把几种特别适合电机控制
图 , 具 体 包 括 : 无 轴 承 永 磁 同 步 电 动 机 本 体 、 双 应用的先进外围设备和具有低成本、高性能处理能
1 概述
在高速机床、涡轮分子泵、离心机、压缩机、 飞轮贮能以及小型发电设备等工业领域,高速和超 高速电机得到越来越广泛的应用。但是机械轴承性 能的严重不足制约着电机向更高转速和更大功率方 向发展,虽然磁浮轴承由于其具有无润滑、无磨损、 无机械噪声和结构简单的特点,在高速电机领域已 经获得广泛的应用,但是由于磁轴承功耗相对较大, 而且本身占有一定的轴向空间,因此限制了高速电 机的微型化,同时也限制了其临界转速和输出功率。 近些年发展起来的无轴承技术则是高速电机研究领 域的一大突破,该技术能够同时实现转矩控制与悬 浮控制。与传统磁悬浮电机悬浮机理不同,它利用
问题。针对系统数据传递具有数据量少、速度高的 特点,采用了双向传送/锁存器 SN74LVTH16245A 和 SN74LVCH16374A 来实现双机并行通讯。
对无轴承永磁同步电动机实现高精度悬浮控 制影响最大的另一个环节是对转轴位移变量的实 时检测[9~10]。本文采用电涡流位移传感器检测转轴 位移,对被测物体实现非接触测量,能更直接、准 确地测量转轴旋转时的位移值。该传感器的标准灵 敏度为 16V/mm,灵敏度误差不大于 1%。此外为了 防止温漂等因素的影响,本实验平台还采用两个传 感器的差分信号作为位置反馈信号,经信号调理 后,通过 DSP 的 A/D 转换再进行位置环的数字调 节。