Robcad基础培训
【ROBCAD学习】robcad_最基本的操作过程
最基本的操作过程Robcad通常要创建两个文件夹,一个为Library;一个为Project。
Library一般存放固定的、不可更改的文件,比如:机器人,车型,测点,围栏,工装,水泥台等等。
Project一般存放的都是Library里的,在Robcad里可以被更改的文件。
Project里的文件可以更改过后,再放回Library文件里当库文件。
注:两个文件夹(包括两个文件夹)下的所有文件名必须是英文,中文不识别。
还有就是创建一个项目的时候最好是在Simulation文件夹下如:Simulation\jin\project或Simulation\jin\library。
以下是本行业使用Robcad的过程:1:打开软件在Robcad界面下,点击Setup,弹出Setup窗口→点击Project→Define→在Project name:填写项目名称→在Path:项目所在的Project的路径→点击Accept确认。
(这一步叫做“定义路径”)→点击Set library root(创建库的根目录)→删掉Filter,selection两栏中的内容,在Directories栏中找到项目的1Library路径,点击Filter键并确认。
创建好之后,点击Configuration→Store→User Project (保存)。
2:在Robcad界面下,点击Project→找到项目名称并点击进入。
弹出Layout窗口,点击Store as(另存) →在弹出窗口里填写另存名(这个时候Project文件下会出现-另存名的文件夹)。
在Layout窗口下点击Get component(获得组件),然后在Get component找出需要使用的诸如车型,机器人等等的组件。
将不需要的项目去掉,在Robcad界面下点击Setup→弹出Setup窗口→点击Projects→再点击Cancel选择要去掉的项目。
Sensor的安装方法(机器人关联Sensor)1.将传感器安装到机器人上在robcad界面下,点击上方工具栏中按钮Robcad,出现下拉菜单选择Workcell,在右下方出现工具框,选择Motion按钮,出2现Motion对话框,选择setting。
CAD基本操作培训
CAD基本操作培训
CAD(计算机辅助设计)是一种使用户能够使用计算机来创建、修改
和分析设计的技术和软件系统。
它可应用于建筑、工程、制造业等各个领域,提高了设计效率和准确性。
本文将介绍CAD的基本操作培训内容。
首先,要熟悉CAD软件的界面和功能。
CAD软件通常由菜单、工具栏、图形窗口、命令行和状态栏等组成。
菜单和工具栏提供了各种功能和命令
的选项;图形窗口显示设计的图形;命令行用于输入命令;状态栏显示有
关当前操作的信息。
其次,要学会创建基本图形。
CAD软件提供了各种绘图工具,如直线、圆、矩形、多边形等。
通过选择绘图工具并在图形窗口中拖动鼠标,可以
创建出相应的基本图形。
也可以通过键盘输入具体的坐标和尺寸来创建图形。
此外,要学会进行尺寸标注和注释。
CAD软件提供了各种尺寸标注和
注释工具,如线性尺寸、径向尺寸、角度尺寸、文本注释等。
通过选择相
应的工具并在图形窗口中选择需要标注或注释的图形,可以将相关的尺寸
和文字添加到图形中。
这有助于更清晰地表达设计意图。
最后,要了解CAD软件其他高级功能和附加工具的使用。
CAD软件通
常具有丰富的功能和工具,如建模、渲染、动画、参数化设计等。
通过学
习这些高级功能和附加工具,可以更加深入地应用CAD进行设计和分析。
ROBCAD_初级培训
软件状态拦
Robcad training course Create by Si Mao
键盘功能键命令介绍
软件工作状态,
F1键,为软件帮助快捷键 F2键,无命令; F3键,视图窗口居中显示
在3D视图窗口中,按F4键,弹出如下 窗口,可输出不同形式的可视化文件:
在3D视图窗口中,按F5键,弹出如下 窗口,各命令会以不同形式,显示视 图零件;和更改不同视图窗口:
Robcad能够在由产品和多类制造资源所构成的环境中,进行机器人工作单元验证和自动化制造过程的 设计、仿真、优化、分析和离线编程。它提供的并行的工程平台,能用于优化焊接工艺过程并计算焊 装节拍时间。利用Robcad,你能够在三维图形计算机工作站上设计和模拟完整的焊装单元和系统。通 过允许制造工程师在前期虚拟地验证自动化制造方法和手段,Robcad使制造商能够无瑕疵地引进自动 化过程。作为一个标准的大规模的解决软件,ROBCAD能够充分集成主要的工艺,通过一套强大的过 程特定应用,覆盖范围广,包括点焊、弧焊、激光焊和冲铆等。 ROBCAD软件的开发有着突出的优点:提高加工质量、精确度和效益;减少劳动力时间和过程工程主 导时间;极大提高程序的准确度和过程质量;优化开发和主要的投资;减少成本;加速了投入市场的 时间。
Robcad training course Create by Si Mao
ROBCAD软件介绍
工作单元布局设计和建模 除带有最全面的机器人库之外,Robcad 还能非常方便地对额外的机器人和设备进行建模。 利用Robcad 布局设计功能,能够构建三维的制造环境。一旦用Robcad 完成制造流程的 设计,就可以通过Robcad 的机器人功能,能够对机器手的运动范围和限制条件进行检查。 机器人仿真 Robcad 能基于控制器特征生成可配置机器人运动路径规划,并以此为基础,能够计算生 产节拍,分析实时性能并缩短调试周期。 真实机器人仿真(RRS) - 基于实际控制器特征的机器人运动路径规划软件提供了对 节拍时间非常精确的计算。 冲突检测 在机器人仿真和运动过程之中,Robcad 能够动态地检测冲突,以防止对设备产生高成本 的损害。 操作顺序(SOP) 利用 Robcad,能够对所有的操作和生产环节及其利用的资源(比如,机器人、机械、人 力)进行详细的描述、排序。通过该功能,能够对整个工作单元的制造过程在可视化的 环境下进行优化。 离线编程(OLP) 利用 Robcad OLP,能够准确地模拟机器人运动径和次序,并直接为车间提供机器人操作程序。Robcad 适用于大 部分机器人型号(50多个接口,超过200 多个控制器配置),它能把控制器信息-包括运动和过程属性-添加到生 成的机器人路径之中。然后,Robcad OLP生成控制器程序,随后该把程序下载到实际控制设备加以应用。 Robcad 还可以从实际设备上传程序,以供重用和进一步优化。
robcad学习手册、资料、讲解
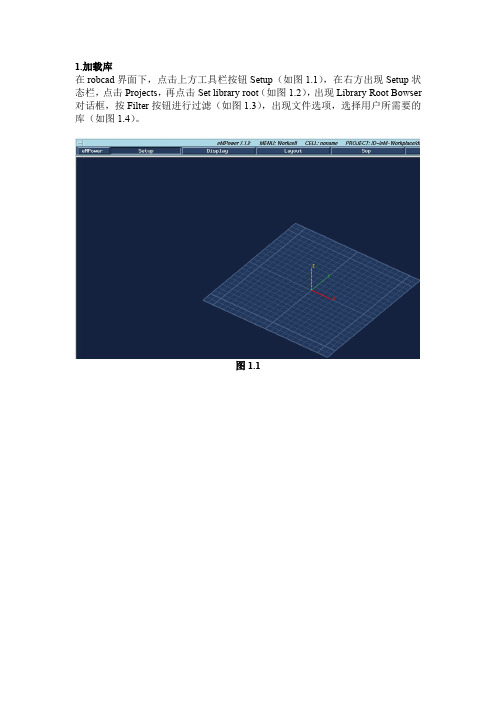
1.加载库在robcad界面下,点击上方工具栏按钮Setup(如图1.1),在右方出现Setup状态栏,点击Projects,再点击Set library root(如图1.2),出现Library Root Bowser 对话框,按Filter按钮进行过滤(如图1.3),出现文件选项,选择用户所需要的库(如图1.4)。
图1.1图1.2图1.3图1.42.加载车模在robcad界面下,点击上方工具栏按钮eMpower,出现下拉菜单选择Workcell (如图2.1)或者点击工具栏中按钮Layout(如图2.2),在右方出现Layout状态栏,点击Load cell(如图2.3),出现Load Cell对话框,选择用户所需要的车模(如图2.4)。
注:有时Cells框中无选项出现,按Thumbnails。
,出现选择对话框,选择用户所需要的车模(如图2.5)。
图2.1图2.2图2.3.图2.4图2.53.在画面中加入机器人在robcad界面下,点击上方工具栏按钮Layout(如图3.1),在右方出现Layou 状态栏,点击Get component(如图3.2),出现Get Component对话框,选择Libraries,选择用户所需要的机器人,Locate At:选择机器人位置,Instance Name:输入机器人名字(如图3.3)。
点击Locate At后的Position,出现Position对话框,点击Values,输入机器人所在位置的数据(如图3.4)。
图3.1图3.2图3.3图3.44.画面操作在robcad界面下,滚动鼠标中键滚轴拉远近视距,按住鼠标右键拖动进行画面的平移,同时按住鼠标中键+右键拖动进行画面的翻转。
5.控制机器人的运动在robcad界面下,点击上方工具栏中按钮eMpower,出现下拉菜单选择Workcell (如图5.1),在右下方出现工具框,选择Motion按钮(如图5.2),出现Motion 对话框(如图5.3),可按不同的坐标对机器人进行运动控制,点击Active mech,出现Mechanisms对话框(如图5.4),可选择机器人,点击编号或直接从界面中选择机器人。
ROBCAD教程第六章-其它主题
第六章:其他选择主题描述eM-Workplace中的其他重要主题(如CAD集成)将在本章中进行介绍。
本章涵盖的主题。
使用eM-Workplace进行CAD集成简介。
I-DEAS与eM-Workplace集成。
用于CAD界面的独立GUI(翻译)。
数据菜单CAD翻译。
纹理映射。
更多数据命令Windows第1课:CAD集成(CI)能够链接到CADDS5,UG,Pro-E,I-DEAS和CATIA零件CAD集成(CI)是将其他CAD系统的数据导入eM-Workplace的更简洁的方式。
这是因为原来的CAD模型从来没有被翻译成eM-Workplace。
使用CI,将原始CAD模型作为组件读取并显示在eM-Workplace中。
与转换的组件不同,集成组件只是原始CAD数据的阴影。
因此,这个组件的“几何形状”是不能改变的,但是可以添加运动学。
什么是CAD集成答案?- 继续与产品数据相关联- CAD独立的电子制造环境- 访问产品组装树- 多个CAD系统环境- 沟通过程信息反馈- 通知设计问题- 初步设计链接- 快速准确地访问产品数据CAD集成优势- 使用“一流的”CAD和电子制造解决方案- 启用并行工程- 如按需设计审查- 尽早开始流程研究- 没有数据翻译或重复- 降低数据管理成本- 没有精确的损失- 属性,几何和装配链接CAD集成优势摘要- 提供快速和准确的程序- 允许并行工程- 降低数据管理成本EDS UG CI状态平台: HP / SGI / SUN应用:SPOT,DYNAMO,MAN,DRILL,CMM,FIXTURES,LINEUG版本:11,13, 15Dasault CATIA CI状态平台:IBM / HP / SUN / SGI应用:SPOT,DYNAMO,MAN,DRILL,CMM,FIXTURES,LINECATIA版本:4.1.6 - 4.2.0(PTC)CV CADDS CI状态平台:HP / SGI / SUN应用:SPOT,DYNAMO,MAN,DRILL,CMM,FIXTURES,LINE CADDS版本:6,7,8,9SDRC I-DEAS CI状态平台:HP / SGI / SUN / IBM应用:SPOT,DYNAMO,MAN,DRILL,FIXTURES,LINEI-DEAS版本:MS6,MS6a,MS7参数技术PRO-E CI状态平台:HP / SGI / SUN应用:SPOT ,DYNAMO ,MAN ,DRILL ,CMM ,FIXTURES ,LINEPRO-E 版本:18,19,20,2000i工业过程 CAD 集成的概念1基于同步数学的制造业 Level of Computeriz ation, CAEFactory eManufacturing Tools AutomationProduc tion Production Production Desi gn Engineerin gCAD 集成的概念2 CAD SystemEnviron ment Math Data and AtributesRO BCAD Envi ronmentConcurrent Access基于同步数学的制造业CAD 集成与 CAD 翻译的区别CAD 翻译(CAD 界面) +/-可以修改翻译的部分 + 需要较少的CAD 许可证 for Several CAD Sys tems in One CellEDS UG Dasault CATIAROBCAD Environm entCV CADDS5 SDRC I−DEAS- 打破了CAD模型和eM-Workplace模型之间的联系- 可能无法获得CAD模型的100%- 占用比CAD集成更多的磁盘空间CAD集成(CAD链接)+ / - 只读部分- 需要更多的CAD许可证+ 维护CAD模型和eM-Workplace +之间的“实时”链接查看在CAD 系统中查看CAD模型的100%+使用大约60%的磁盘空间(不重复数据)同一单元中的多个CAD集成部件用户现在可以将CADDS5,UG和CATIA,I-DEAS和Pro-E的CAD集成零件放在同一个单元中。
ROBCAD教程第四章-处理
第4章:处理描述现在,我们将利用前三章所获得的知识来设置自己的路径,并使用eM-Workplace 库结构。
本章涵盖的主题· 逆向运动学:eM-Workplace的核心技术。
使用路径。
填充库。
从最少约束到最多约束第1课:逆运动学:e M-Workplace的核心技术原则定义机构/设备具有运动学的组件eM-Workplace Robot 在 运动链的末端创建一个TOOLFRAME 并编译(定义)该机制将使一个简单的运动学设备安装到eM-Workplace 机器人(或CMM )中。
放置编辑器“放”命令放在“源”的方向:将一个对象从源帧放到目标帧。
- >将对象从源框架移动到目标框架 - >对象的方向不受影响(保持源框架的方向) 以“目标”为导向:将一个对象从源框架到目标框架。
- >将对象从源框架移动到目标框架。
- >对象的方向改变为目标框架 Joint Angles Direct Kinematics Position and orientation of theend−effectorInverse KinematicsLink ParamtersLink ParamtersJoint Angles INPUTINPUTOUTPUT直接运动学直接运动学如何工作:1. 给eM-Workplace 一个状态/姿势。
状态/姿态包含机构的每个关节的确切值。
当前位置的 目标姿势J1 = 0 J1 = 10J2 = 10 移动到姿势J2 = 120J3 = 0 J 3 = 100J4 = 15 J4 = 45J5 = 40 J5 = 32J6 = 20 J6 = 462. eM-Workplace 将机制从当前位置移动到目标位置- 易于使用eM-Workplace ,因为eM-Workplace 已经知道联合价值- 直接运动学可用于任何运动装置,如枪支,夹具,机器人等。
逆运动学逆向运动学如何工作:1. 给eM-Workplace 一个位置。
CAD基础基本实用培训ppt课件
常用图例
新建建筑物 原有建筑物 拟建建筑物
16.50241.510.30 46.60
46.15
10
18.50
拆除建筑物
总平面图 1:500
先文字说明后图样 先图形后尺寸
四、施工图中常用的符号
(一)定位轴线:是用来确定房屋主要结构或构件的位置及其尺寸的基线。
用于平面时,称平面定位轴线(即定位轴线)。用于竖向时,称竖向 定位轴线。 定位轴线之间的距离,应符合模数数列的规定。
16
1、定位轴线: 平面定位轴线编号原则:水平方向采用阿拉伯数字,从左向右依次编
写;垂直方向采用大写拉丁字母,从下至上依次编写,其中 I、O、Z 不 得使用,避免同1、0、2 混要淆。
细实线 直径8mm或10mm
4
C
编号
1 B
B
240 120
120 120
A
1
2
1
3
2
17
2、附加定位轴线:用于次要承重构件处。
1 表示C号轴线之后 c 附加的第1条轴线。
3、定位轴线的各种注法
表示3号轴线之后
12
修改类基本编辑命令
4.3.3第三大类:修改类编辑命令 修改类编辑命令主要有: Trim (修剪)、Extend (延伸)、Break (打断)、
Chamfer (倒角)、Fillet (倒圆角)、 Explode (分 解)。 修剪命令(Trim)——在给定边界处修剪图线,剪切边同时 也可作为被剪切边,也可设置修剪边延伸模式;修剪命令的合 理使用,可以方便快捷地对图形实体进行编辑处理,达到符合 实际需要的图形实体。 延伸命令(Extend)——将图线延长至某一指定边界,界限 边也可以作为延伸对象,操作与修剪命令类似;
ROBCAD培训
11. 整合数据、文档
整合ROBCAD数据时,最好在设计阶段时就将CO文件放置在Library里, 而不是Project,给客户一种严谨的工作态度的感觉 2. 所有的正式数据需一式三份(提交客户2份,一份留档)的进行光碟刻录 (光碟的封面要写清楚项目名称、数据内容、刻盘时间) 1.
注意:上述排版文件的文字内容只有小写英语和数字,将所有字母全部转换 为小写,可应用函数LOWER( )。 2. 将焊点文件导入Robcad后,根据机器人所在位置将焊点分成数条路径
没有过渡点的路径
有过渡
1. 机器人安装设备的时候需要注意机器人的型号和孔位,不同型号的 机器人孔位是不同的 2. 焊枪的TCP设定需要根据客户的标准,抓手的TCP不能使用车身的 原始坐标系
7. 机器人模拟过程以及注意细节
1. 在模拟过程中,不能光考虑焊枪的静态是否干涉,还需要注意机 器人和焊枪是否能够顺利的进出工件和夹具(尤其要注意网球拍, 不能和4轴靠近,最好留有20°的余量,如图)
20°
2. 需要注意机器人的姿态(1、6轴不能同轴线,5轴的角度需要超过正 负15°)
正负15°
6轴
设计焊枪?设计焊枪前先将焊点的方向以及角度大部分项目的焊点可调角度为5以内调整到位?根据客户要求挑选正确品牌nimakobra等合适种类的焊枪xguncgun伺服焊枪非伺服焊枪?切完section后将焊枪放入section看是否发生干涉如果发生干涉则将section另存为co数据并将section平移至原始坐标然后转换为igs文件最后做焊枪的修改意向说明文档和焊枪所需参数数据
培训内容:
1. 介绍ROBCAD的用途 2. 介绍CO、CELL的建立和保存 3. 介绍项目工作流程 4. 怎样搭建工位 5. 导入、调整焊点 6. 机器人安装设备和设定TCP 7. 机器人模拟过程以及注意细节 8. 设计焊枪 9. 调整机器人工作路径 10.制作SOP 11.数据整理、打包
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
选择焊枪
选择机器人安装面坐标
7.2、焊点输入:
数据准备: 焊点信息格式:“POINT+空格+焊点号(小写字母开头)+Tab+X值+Tab+Y值+Tab+Z值”。 例:“POINT sp_0221 490.8 -135.7 -21.8” 用EXCEL编辑,以文本文件(制表符分隔)格式保存成“.txt”文件。将后缀改成“.pt”。 文件名必须以字母开头。复制到project文件夹下 导入ROBCAD: 调入工件,放在原点位置不要移动。要保证工件坐标系与焊点坐标系一致。 进入SPOT模块 上边weld_locs 右侧Import 选择pt文件,选择工件。 右侧Project 选择焊点,选择工件。
பைடு நூலகம்
7.1、把焊枪安装到机器人上
1.导入一个机器人co 3.点Active mech,选择要控制的机器人。 5.点击Mount,弹出安装焊枪对话框如右图示。 7.点Accept同意,安装完成 2.点屏幕右下角的motion图标 4.点下图的Setting图标。 6.根据下图注释选择对工具及坐标
选择焊枪安装面坐标
6.1、co位置摆放
用F12键切换成Component选择方式。 在需要移动的物体上点右键,选择Placement。 World, Self, Other是三种参考坐标系,点X, Y, Z,配合中键拖动就可以移动物体 , Rx, Ry, Rz是旋转物体。点View返回屏幕操作。
6.2、手动操作机器人运动
右侧Import 选择pt文件,选择工件。 右侧Project 选择焊点,选择工件。
进入SPOT模块
上边weld_locs
选择车件数模
选择机器人安装面坐标
1
2
3
4
永久设置:
1. 点屏幕右侧Projects 点下面的Define “Project name:”项填入项目名称; “Path:”项填入project文件夹的完整路径。路径格式为:“D:\Lavida_Touran\project” 技巧:填Path项时,可以先复制好路径,回到Define窗口,左键点一下Path右边空白处,使黑色 三角箭头指向该项,再用中键点一下此处,就可以把路径粘贴上去。
4.在黄框中选择要读入的co文件,点ok即可导入。
可切换project和library文件夹
5.2、屏幕操作
1.屏幕移动:按住右键拖动。 2.缩放: 按住中键左右拖动。向右方大,向左缩小。 3.旋转视角:同时按住中键和右键拖动。 复制、粘贴:中键
最常用的快捷键:F11: 屏幕捕捉方式,在snap和Where Picked之间切换。 F12: 屏幕选择方式,在Entity和Component之间切换。 见下图右侧的PICK: Snap; Entity
1
2
3
5.以后打开软件使用时,只需执行第二步即可。
4、数据转换 “igs” “.co”
1 4
2
3选择
5
8双击关闭
6 5
7完成
3.点屏幕右侧的Get component。如下图
5.1、co数据导入
1.工作路径设置完成后,将co数据copy到library文件夹中。 2.点击下图的Workcell
1.导入一个机器人co 2.点屏幕右下角的motion图标
3.点Active mech,选择要控制的机器人。可以在列表中选, 也可直接点选模型。
4.点下图的joint jog图标
机器人的六个关节
5.双击上边右图其中一个关节,按住鼠标中键左右拖动,机器人就可相应转动。 6.取消控制机器人可点击View小老鼠。
目录
1、Robcad数据类型 2、Robcad数据存放结构 3、设置工作路径 4、数据转换 “igs” “.co” 5、co数据导入、屏幕操作 6、co位置摆放、手动操作机器人运动 7、把焊枪安装到机器人上、焊点输入
1、Robcad数据类型
Robcad有两种数据格式:ce和co, 如下图:
ce和co都是文件夹形式,里面包含许多个数据文件,其中有个 文件是预览图。预览图需要手动添加。添加方法后叙介绍。 ce数据相当于CATIA的product文件,只包含装配信息。 co数据相当于CATIA的part文件,包含三维数据。
1.设置project路径:点屏幕左上角的Robcad 点Project选项。
2.点<Browse Project Tree>。
3.双击“..”返回上级目录, “.”是当前文件夹(没用)。找到要 模拟的项目文件夹,双击第三张图的project文件夹,点OK。
4.设置library路径:按下图提示操作。 点屏幕左上方的Setup 点Set library root 如果第四步窗口中没有内容,点 一下Filter,再双击选择library文件夹 OK完成。
2、 Robcad数据存放结构
项目文件夹中必须包含project和library两个文件夹。
project文件夹存放ce数据;library文件夹存放co数据,但co数据不能直 接放到library文件夹中,必须再创建下一级文件夹分类存放。
3、设置工作路径 设置工作路径有两种方式:临时设置、永久设置。 临时设置:(每次使用时都要重新设置一遍)
1
3
2
2.点屏幕左上角的Robcad 点Project选项 如前面图示看到的Project图标 ,出现一个以第一步定 义的Project name为名称的选项,点击该项。
3.临时设置的第四步。 4.保存路径设置:点Setup选项卡的Configuration 点Store 点User project。