航空声呐仿真系统设计
艇用声纳信息辅助系统软件设计的开题报告

艇用声纳信息辅助系统软件设计的开题报告一、选题背景声纳在艇艏部位的应用已经非常普遍,作为船只的侦查手段,声纳有着不可替代的作用,它可以实时掌握海底情况,帮助船只避免水下危险。
然而,声纳的应用仅仅是收集到声波信号,而这些信号是需要被处理才能得到实用的信息的。
现有的声纳处理软件普遍需要技术力量高、熟悉声学原理等,使用门槛较高,而且还存在一些问题,比如数据处理效率低,数据处理精度不高等问题。
因此,为了提高声纳数据处理和信息辅助的效率,需要设计一套专门的艇用声纳信息辅助系统软件。
二、选题意义针对现有声纳处理软件存在的问题,设计一套高效、精确、易用的艇用声纳信息辅助系统具有非常重要的意义。
该软件利用声纳设备采集到的数据,通过一系列的算法和技术,将声波数据转化成实用的信息,为海事部门、海洋调查机构、航运公司等提供全面、准确的水下数据支持,实现水下信息快速获取、水下环境监测、水下作业准确执行等作用。
三、主要研究内容1. 艇用声纳信号处理算法的研究和实现,例如:滤波、降噪、增强和探测等方面。
2. 艇用声纳信息辅助系统界面设计,考虑到操作性和用户友好性。
3. 艇用声纳数据的可视化展示,如波形图、频谱图等。
4. 对系统进行效率测试和精度测试,从多个角度探讨如何提高数据处理效率和精度。
四、预期成果1. 完成一套可用的艇用声纳信息辅助系统软件,提高水下数据处理效率和精度。
2. 测试分析该软件的效率和精度,以及操作性和用户友好性等方面。
3. 打破原有技术的瓶颈,推动声纳领域的科技发展。
五、研究方法及步骤1. 资料搜集阶段:针对海洋、水下勘探、声学、信号处理等方面的相关文献和现有的声纳处理软件,做一定的研究和对比;2. 需求分析阶段:对声纳数据进行需求分析,确定具体的处理方法;3. 系统设计阶段:在软件设计方面,我们采用基于C++和QT的跨平台开发,同时进行艇用声纳信息辅助系统的界面设计,确定重点处理算法的实现方法;4. 编程实现阶段:软件编码和测试,开发艇用声纳数据的可视化展示功能;5. 效果测试和分析:评估软件的测试效果,验证艇用声纳信息辅助系统的性能和优劣,进行性能测试和规模测试;6. 确定进一步的发展方向,探索新的技术、算法和模型等。
一种直升机吊放声纳搜潜效能的仿真建模方法
一种直升机吊放声纳搜潜效能的仿真建模方法摘要:声纳是水下探测中常用的一种工具,而直升机吊放声纳则是水下探测中常用的一种方式。
本文提出了一种直升机吊放声纳搜潜效能的仿真建模方法,该方法能够有效地评估直升机吊放声纳的探测效率,并为水下探测提供一种新的技术手段。
关键词:直升机吊放声纳,搜潜效能,仿真建模一、引言声纳是水下探测中常用的一种工具,它能够通过声波的反射来探测水下物体的位置和形状等信息。
而直升机吊放声纳则是一种常用的水下探测方式,它可以通过直升机的高度和速度等因素来控制声纳的探测范围和深度。
然而,直升机吊放声纳的搜潜效能与各种因素有关,如直升机的高度、速度、声纳的频率等,因此需要进行一定的仿真建模来评估其探测效率。
二、直升机吊放声纳的搜潜效能直升机吊放声纳的搜潜效能是指声纳在不同深度下的探测效率。
声纳在水下传播时,会受到水下环境的影响,如水深、水温、水盐度等因素会影响声波的传播速度和传播距离。
因此,直升机吊放声纳的搜潜效能与水下环境因素有关。
另外,直升机吊放声纳的搜潜效能还与直升机的高度、速度、声纳的频率等因素有关。
当直升机的高度和速度较高时,声纳的探测范围和深度会降低;而当声纳的频率较高时,声波的传播距离也会降低。
因此,需要对这些因素进行仿真建模,以评估直升机吊放声纳的搜潜效能。
三、直升机吊放声纳的仿真建模方法直升机吊放声纳的仿真建模方法主要包括以下步骤:1. 建立声纳的传播模型。
根据声波在水中的传播规律,建立声纳的传播模型,包括声波的传播速度、传播距离和传播路径等。
2. 建立直升机吊放声纳的运动模型。
根据直升机的运动规律,建立直升机吊放声纳的运动模型,包括直升机的高度、速度和声纳的悬挂深度等。
3. 确定水下环境因素。
根据实际情况,确定水下环境因素,包括水深、水温、水盐度等。
4. 选择声纳的频率。
根据实际情况,选择声纳的频率,以评估其对水下物体的探测效能。
5. 进行仿真计算。
根据以上模型和参数,进行仿真计算,评估直升机吊放声纳的搜潜效能。
实用声纳阵元信号测试系统设计
岸上训练 时, 由于缺 乏基 阵工作 的水文和 目标条 件使得训练的真
实感和有 效性都大打折扣 。 因此 , 在实验室条件下 , 根据训练的具
体 背景 , 模 拟 生 成 声 纳 基 阵 接 收 到 的信 号 , 是 声 纳 模 拟 训 练 技 术
研 究的重要 内容之一 。 王 希敏等采 用 由多片 D S P和工控机为核心
讨 了基 于并 行 D S P系统 的仿 真系 统的软硬 件结 合设计 方法 。 计 算机主要完成人机交互 、 设 定训练 战术背景及推演、 声场计 算、 魏 晓盼等提 出了工程 上应用 的舰 船辐射噪 声连续谱和 线谱 的数 存储 环境数据和 目标噪声数据 、 信 号时延及插值计算等功能 。D A
S u n R o n g g u a n g , J i a n g B i n , D a i W e i g u o
( T h e N a v y S u b m a r i n e A c a d e m y ,9 i n g d a o S h a n d o n g , 2 6 6 1 0 0 )
系 统 的硬 件 主 要 由 一 台 M I C 一 3 0 4 1 A C P C I 总线 工控计算机 、
组 成的 D S P并 行 处 理 系统 , 进 行了声纳 阵元域信号 仿真研 究, 探 三 块 C P C I — A D I 6 0 一 D A信 号 处 理 板 及 一 块 信 号 驱 动 板 组 成 。 工 控
T he sy st e m b as ed o n t he real noi s e rec o rde d o n t he s ea, by co nsi d e ri n g of s peci al t acti C bac kg ro un d an d
某型直升机飞行模拟器音效仿真系统的实现
某型直升机飞行模拟器音效仿真系统的实现作者:张亮陈盖凯程健来源:《中国科技博览》2016年第28期[摘 ;要]飞行模拟器是飞行员常用的训练装备之一,包括飞行解算仿真,仪表仿真、视景仿真和音效仿真等多个相对独立而又互相交联的软硬件系统。
本文主要围绕某型飞机的音效仿真进行了深入研究,重点对音效仿真系统的硬件组成、软件仿真进行了深入探讨和算法实现。
通过调研某型飞机的真实状态采集了约200个飞机声音原音数据,采用若干种声音处理技术和实现方法对其进行测试,最终利用DirectSound技术实现了某型直升机飞行模拟器的音效仿真,为飞行模拟器复杂战场环境下的音效仿真提供了一种有效的实现方法和手段。
[关键词]仿真 ;飞行模拟器 ;DirectSound TCP/IP中图分类号:TM75 文献标识码:A 文章编号:1009-914X(2016)28-0161-02一、引言飞行模拟训练是飞行员进行飞行技能学习和训练的重要方式方法之一,其研制涉及飞机结构、飞行原理、模拟仿真、系统工程、电子电路、机械加工等多学科多领域,是一个人在回路的大型实时软硬件综合集成系统。
音效仿真系统是飞行模拟器的重要子系统之一,包括飞机飞行整个过程中的通电自检、发动机运行、旋翼转动、危险告警、环境音效、语音通信以及其他操作等多种声音,需要根据飞机实时飞行状态对各种声音进行声音采集,音效处理、实时调整和控制输出。
DirectSound是微软多媒体技术DirectX的组件之一,封装了大量音频处理API函数,它可以提供快速的多个声音的混合输出,允许进行波形声音的捕获、重放,提供了3D声效算法,模拟出真实的3D立体声,并且可以直接访问相关设备,通过控制硬件提供更为丰富的音效处理功能,是进行飞行模拟器音效仿真系统开发的关键技术之一。
音效仿真系统的硬件系统主要由音效处理主机(运行音效仿真系统)、交换机、功放、音箱、话筒、耳麦等部分组成,包括系统控制单元、音频混音单元、功率放大单元和音效输出单元等四部分,其中大部分都集成在标准4U机箱内,有4个通道的功放输出,8路麦克/线性输入,6路耳机/线性输出,通过以太网与飞行主仿真系统之间进行数据、语音通信。
声纳目标模拟系统设计与仿真
De i n a I sg I Em u a i n 0 0 a r e i u a i n S se d l t fS n r Ta g tS m l t y t m 0 0
ZHENG n, ANG n Ku W Yi g—mi ZHANG h ng—q n, Ze i
i h s p p r rs na s tl n a n e 踟 pe t n lz h h r ce s 0 n e ae c o sg a.T e t res n t i a e . c 0 sa l i a【 s a x A y e 1 o a ay e t e c aa tr fu d Ⅲ tre h in 1 h ag t
v rn n . h g h x e i0 me t T mu h t e e p me t ew e i lt n s se a d s n rs se ,t e c mp rs n o i ltd d t n sb t e n s mu ai y tm n o a y t m h 0 a io fs o mua e aa a d me s rd d t s v n n a u e aa i e .T e d t ro l w b e i h o a y tm n l v l i fti e in i rv d h a ae r ri al a l n t e s n rs s s o e a d t e ai t o sd sg sp 0 e . l d y h KEYW oRDS: o a ; a g tsmu ain s se E l t n s f a e S n r re i l t y t m; mu ai o t r r 0 o w
基于HLA吊放声纳系统模拟器设计

总第173期2008年第11期舰船电子工程Ship Electronic Enginee ring Vol.28No.11119 基于H L A 吊放声纳系统模拟器设计3丁小峰1),2) 鞠建波1) 范敬泽1)(海军航空工程学院电子工程系1) 烟台 264001)(海军航空训练基地2) 青岛 266108)摘 要 介绍了吊放声纳系统模拟器的系统组成,构建了仿真联邦,给出了系统联邦成员,分析了该型吊放声纳系统模拟器的设计思想。
关键词 吊放声纳;联邦;教员控制台;设备仿真;联邦成员中图分类号 TP391.9Design of Dipp ing Sonar System Si mulator Based on HLADing Xiaof e ng 1),2) J u Jia nbo 1) Fa n Jingze 1)(Depa rtment of Electronic and In fo rmational Enginee ring ,Naval Aeronautical Engineering Institute 1),Y antai 264001)(Na val Aerona utical Tr aining Ba se 2),Qingdao 266108)Abs tra ct Thi s paper fir stly introduces the gene ral const ruction of dipping sona r syste m simulator ,builds up simulation federation a nd shows up federate ,finally analyse s t he de sign methods of dipping sonar system simulator.Ke y w ords dipping sona r ,federation ,instr ucto r console ,training simulation ,f ede rate Class N umber TP391.91 引言吊放声纳系统模拟器是根据声纳员教学训练的需要而研制的模拟训练器材。
一种声呐仿真系统设计中的舰船辐射噪声仿真方法研究
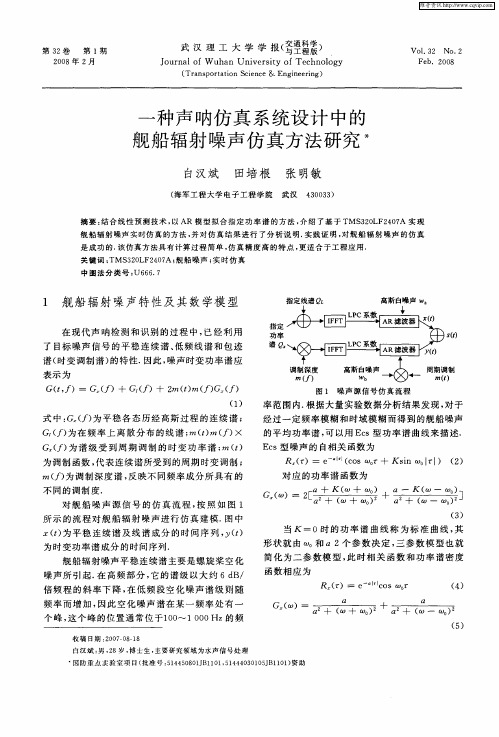
参 照 所 要仿 真 的 x 型 声 呐 的接 收频 率 范 围 ( ~ 9k ) 接 收波 段 ( 1 Hz 和 0波 段 : ~ 5k , 1 Hz 1波 段 : ~7k , 段 : ~ 9k ) 将 整个 接 收频 3 Hz 2波 5 Hz ,
指 定 线 谱
高 斯 白噪 声 w
指 定 功 率 谱
谱( 时变调 制谱 ) 的特 性. 因此 , 噪声 时变功 率谱 应
表 示 为
G( , f 厂)一 G 厂)+ G,厂 ( ( )+ 2 () ( G 厂) m f 厂) (
( 1)
图 1 噪声 源信 号 仿 真 流程
( ) 5
为时变功 率谱 成分 的时间序列 .
舰 船辐 射噪声 平 稳连续 谱主要 是螺旋 桨 空化
噪声 所 引起 . 高频 部 分 , 在 它的谱 级 以大 约 6d / B 倍频 程 的斜 率 下 降 , 低 频 段空 化 噪声谱 级 则 随 在
频率 而增 加 , 因此 空化 噪声谱 在 某一 频率 处 有 一 个峰, 这个 峰 的位置 通 常位于1 O 0 O ~10 0 Hz的频
维普资讯
第 3 卷 第 1 2 期 20 年 2 08 月
武汉理工大学学报鹜 差 ( )
J u n lo u a n v riy o c n lg o r a fW h n U ie st fTe h oo y
主动声呐信号建模及仿真
引用格式:周烨ꎬ李启飞ꎬ李沛宗ꎬ等.主动声呐信号建模及仿真[J].电光与控制ꎬ2020 27(2):14 ̄17.ZHOUY LIQF LIPZ etal.Activesonarsignalmodelingandsimulation[J].ElectronicsOptics&Control 2020 27(2):14 ̄17.主动声呐信号建模及仿真周㊀烨ꎬ㊀李启飞ꎬ㊀李沛宗ꎬ㊀巩健文ꎬ㊀杨日杰(海军航空大学ꎬ山东烟台㊀264001)摘㊀要:结合以往主动声呐信号仿真对于目标构建较为简单㊁仿真回波与真实回波拟合度较低且数值积分计算量庞大㊁不利于复杂目标的实时预报的缺点ꎬ在构建海洋环境噪声㊁海洋混响模型的基础上整合亮点模型进行了舰船主动声呐回波信号仿真ꎮ经水池实验验证ꎬ与实验回波数据相比达到了预期效果ꎬ为声呐设备的测试改良提供了良好的借鉴和思路ꎮ关键词:信号仿真ꎻ海洋环境噪声ꎻ海洋混响ꎻ亮点模型中图分类号:U66㊀㊀㊀文献标志码:A㊀㊀㊀doi:10.3969/j.issn.1671-637X.2020.02.004ActiveSonarSignalModelingandSimulationZHOUYe ㊀LIQifei ㊀LIPeizong ㊀GONGJianwen ㊀YANGRijie(NavalAeronauticalUniversity Yantai264001 China)Abstract:Underwatertargetdetectionisoneofthekeytechnologiesinnavigation.Thepreviousactivesonarsignalsimulationhastheshortcomingsofrelativelysimpletargetmodel lowdegree ̄of ̄fittingofthesimulatedechowiththerealecho andlargecomputationburden whichisnotsuitableforreal ̄timepredictionofcomplextarget.Basedonbuildingupthemodelsoftheoceanambientnoiseandtheoceanreverberation wemadeactivesonarechosignalsimulationfortheshipbyusinghighlightmodel.Theresultofpoolexperimentshowedthat theechoreachedtheexpectedeffectincomparisonwiththeechoinexperiment whichsuppliedareferencefortestimprovementofthesonarset.Keywords:signalsimulationꎻoceanambientnoiseꎻoceanreverberationꎻhighlightmodel0㊀引言利用主动声呐浮标可以实现对水下目标及地形的精确探测ꎬ以及针对水下目标的精确跟踪㊁识别和信号检测[1]ꎮ航船主动声呐研究自20世纪50年代开始已历经半个世纪ꎬ目前仍然有很多难以解决的问题ꎬ包括背景噪声处理㊁目标识别等[2-3]ꎮ伴随着各国海洋战略的出台ꎬ和电子技术以及信号处理技术的发展ꎬ各国均将建立完善的水下目标特征资料库作为主动声呐发展的重点ꎬ因此ꎬ构建主动声呐信号仿真模型对于航船声呐设备发展以及现代海上远航都具有重要意义[4]ꎮ1㊀主动声呐回波模型构建主动声呐是通过水下换能器发射具有特定信号特收稿日期:2019 ̄03 ̄21㊀㊀㊀㊀修回日期:2019 ̄12 ̄04基金项目:山东省重点研发计划(2016CYJS02A01)作者简介:周㊀烨(1995 )ꎬ男ꎬ河北沧州人ꎬ硕士生ꎬ研究方向为水声工程ꎮ征的声波ꎬ在经历水下目标的作用后由水听器接收回声信号来获取水下环境以及水下目标特征ꎮ在这个过程中ꎬ水听器接收的回波信号并不完全是有效信息ꎮ在海洋环境中存在多种噪声干扰ꎬ包括在海区普遍存在的海洋环境噪声干扰和混响干扰[5]ꎮ为了能真实仿真主动声呐回波信号的各类信息ꎬ对海洋环境噪声和海洋混响建模也成为声呐回波模型不可或缺的一部分[6-7]ꎮ主动声呐回波模型的构建主要包括对主动声呐发射信号的生成ꎬ海洋环境噪声的模拟ꎬ海洋混响场模拟以及目标强度特性模拟和最后的主动声呐回波仿真ꎮ1.1㊀海洋环境噪声模型真实的海洋环境噪声具有时变性ꎬ这使得很难用一个确定的数学模型对它进行建模仿真ꎮ从20世纪30年代开始ꎬ人们对于海洋环境噪声已经开展了全方位研究ꎬ特别是对海洋环境噪声的谱级测量ꎬ在大量实测数据的支撑下ꎬ形成了基于实测数据的近似经验公式进行海洋环境噪声预报工作ꎮ在实际仿真中ꎬ通常以海况来描述所处海区情况ꎬ有一种浅海环境噪声经验公式来近似描述海况与环境噪声谱级的关系[8]ꎬ即Vol.27㊀No.2Feb.2020㊀㊀第27卷㊀第2期2020年2月㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀电㊀光㊀与㊀控㊀制ElectronicsOptics&Control周㊀烨等:㊀主动声呐信号建模及仿真NL(f)=10lgf-1.7+6S+55(1)式中:f为声信号频率ꎻS为当时海况等级ꎻNL表示海洋环境噪声谱级ꎮ在一定深度上ꎬ环境噪声的振幅分布满足高斯分布ꎬ因此当计算出海洋环境噪声谱之后ꎬ可以利用高斯噪声近似模拟时域信号ꎬ产生N(aꎬb)的随机噪声序列ꎬ并进行傅里叶变换取其频域信息ꎬ得到随机噪声的频域函数R(w)ꎮ最后令NL(f)和R(w)相乘ꎬ得到N(f)=NL(f)ˑR(f)(2)对其进行傅里叶反变换ꎬ可得到时域海洋环境噪声序列N(t)ꎬ即具有特定振幅分布和谱级曲线要求的仿真海洋环境噪声序列[9]ꎮ在设定3级海况的模拟环境中ꎬ仿真结果如图1㊁图2所示ꎮ图1㊀海洋环境噪声时域仿真Fig.1㊀Timedomainsimulationofmarineambientnoise图2㊀海洋环境噪声频域仿真Fig.2㊀Frequencydomainsimulationofmarineambientnoise1.2㊀混响模拟海洋中的混响由体积混响㊁界面混响和海底混响组成ꎬ本文设定为在浅海环境中进行主动声呐回波仿真ꎬ因此暂不考虑体积混响ꎮ由于存在着多途影响ꎬ再加上射线声学有着诸多的局限性ꎬ可以采用简正波模型进行描述[10-11]ꎮ本文基于射线 简正波类比ꎬ采用了简正波方法来模拟浅海中的混响场ꎮ其中ꎬ构建的混响模型表示为㊀㊀R(t)=I0∬A(t)mnH(rmn)H(rmn)SmndAmn(3)式中:R为时间t的混响级ꎻI0为t持续时间内的声源的强度ꎻHm为沿着路径m从声源至散射元的传播函数ꎻHn表示沿着路径n从散射元到接收水听器的传播函数ꎻSmn=S(θmꎬθnꎬϕ)表示散射函数ꎬ具体表示从入射m到出射n的每一个单位面积dAmn的散射ꎻr为声源与目标的声程ꎻ求和是对于所有散射波进行计算ꎬ而积分只是在时间t内对混响有贡献的散射面积内进行ꎻ对于简正波方法ꎬ声能量通过每一号简正波传播ꎬ其中的双求和是指对模进行的ꎻ两个H是不同散射体激发散射波的传播损失ꎻSmn也描述为模态耦合函数ꎮ简正波理论认为混响的形成由3个过程组成ꎬ声能量在经过前向传播之后到达散射点ꎬ经过散射点的散射之后再经过传播到达接收点形成混响[12]ꎮ因此在入射波激励下的海底散射声场可以表示为㊀Prec(r)=2πir Mm=1Zm(zs)Am(zb)e-δmrkmei[kr-φm(zb)]ˑ Mn=1Zn(zs)An(zb)e-δnrknei[kr-φn(zb)]ˑgmneiϕmn(4)式中:φmꎬφn代表不同简正波号数ꎬϕmn表示传播项ꎻ对Zm和Zn的求解是关键ꎬ基于Kraken简正波海洋模型ꎬ可以求解出每一号简正波的本征函数和本征值ꎬ则混响强度可以表示为㊀㊀Rray(t)=ʏτ00I0(τ) nHn(rmn)S(θmꎬθn)dAmn(5)利用射线 简正波类比方法ꎬ每一号简正波都有各自的传播时间ꎬ其海洋混响仿真结果如图3㊁图4所示ꎮ图3㊀混响模拟(线性调频信号激励)Fig.3㊀Reverberationsimulation(LFMsignalexcitation)图4㊀混响强度Fig.4㊀Reverberationintensity51㊀第2期1.3㊀回波亮点模型以往对于主动声呐目标回波信号仿真中大多采用直接将信号进行时延处理ꎬ对于运动目标的处理则会采用人为加入相移来仿真回波信号ꎬ这种方法得到的回波仿真只能粗略模拟目标回波的基本特性以及大致实现定向功能ꎬ回波信号的仿真有效程度不高[13]ꎮ对此ꎬ本文采用亮点模型来模拟水下目标的散射特性ꎮ在对水下目标建模中ꎬ在声散射情况下镜反射点的反射波强度是最大的ꎮ在入射声波为高频的条件下ꎬ目标亮点主要由几何亮点和弹性亮点组成ꎮ在仿真设计中ꎬ特别是远场情况下ꎬ可以把水下目标看作刚性材料ꎬ由此弹性回波不予考虑ꎮ在亮点模型中ꎬ一般将水下目标看作是一个网络系统ꎬ主动声呐的入射声波是激励ꎬ回波则被看作系统在激励下的响应ꎮ亮点的传输函数表达为H(rꎬω)= Nm=1Am(rꎬω)ejωtejϕ(6)对于传输函数ꎬ解出其中不同的幅度散射因子㊁时延和相移即可ꎬ以往的文献对于时延和相移讨论的很多ꎬ而对于幅度散射因子ꎬ因为环境和目标物的差异导致其很难给出确定的表达形式ꎬ其可近似为Ai=10TSꎬi/20(7)式中ꎬTSꎬi为单个亮点目标的目标强度ꎮ这样ꎬ求解亮点的目标强度就可以求出Aiꎮ在讨论实际任意形状目标的几何声散射中ꎬ已经有相对成熟的Kirchhoff近似法对简单形状目标进行讨论ꎮ一般来说ꎬ水下目标的散射声场可以表示为I=ʏseik2ΔrcosθdS(8)式中:Δr为入射声线到表面与目标声中心的声程差ꎻS为目标受声线照射部分面积ꎻθ为入射声线与接触点法向量夹角ꎮ目标强度TS可以表示为TS=10lgI2λ2()(9)因此ꎬ对于目标强度的求解可以转化为对于Kirchhoff的积分求解ꎮ一个复杂的声呐目标可以分解为类似球㊁圆柱㊁椭球㊁椎体等目标ꎮ对于球体和圆柱体ꎬ可以直接将Kirchhoff积分求解ꎮ有限长圆柱体的目标强度可以表示为TS=10lg[R1L22λ(1+R1/r)(sinββ)2cos2θ](10)式中:θ为声波入射角ꎻR1为底边半径ꎻβ=kLsinθꎬk为2π/λꎮ任意凸形物体的目标强度可表示为TS=10lgR1R24(1+R1/r)(1+R2/r)(11)依据此式可进行椭球体计算ꎬ设椭球体的长轴为aꎬ短轴为bꎬ在短轴方向入射时ꎬ其曲率半径为R1=b2/aꎬR2=aꎻ当在长轴方向入射时ꎬ曲率半径均为a2/bꎬ计算时将其代入式(11)求目标强度ꎮ对于椎体的计算ꎬ可以按照椎顶的目标强度计算ꎬ即TS=10lg[(λ28π)tan4ψ(1-sin2θcos2ψ)-3](12)式中:ψ是椎体的开角ꎬ为方便计算ꎬ取值为45ʎꎮ2㊀水下目标建模分析本文用简单潜艇模型作为水下目标ꎬ将潜艇目标等效为3亮点模型ꎬ如图5所示ꎬ亮点位置分别位于艇艏㊁艇体和艇艉ꎮ用椭球体来仿真艇艏亮点ꎬ用椎体仿真艇艉亮点ꎬ有限长圆柱体模拟艇体亮点[13]ꎮ图5㊀潜艇3亮点模型Fig.5㊀The3 ̄highlightmodelofsubmarine㊀㊀在以线性调频(LFM)信号为探测信号的前提下ꎬ目标散射特性仿真结果如图6所示ꎮ图6㊀目标散射特性Fig.6㊀Scatteringcharacteristicsofthetarget㊀㊀根据目标散射特性ꎬ结合入射波ꎬ即可得到目标回波信号ꎬ外加之前仿真得到的噪声信号ꎬ可得到主动声呐探测模拟信号ꎬ如图7所示ꎮ图7㊀声呐仿真信号Fig.7㊀Simulationsignalofthesonar61第27卷㊀电㊀光㊀与㊀控㊀制周㊀烨等:㊀主动声呐信号建模及仿真3㊀实验验证为进一步验证仿真模型相较于传统仿真更能真实地反映水下目标回波模拟结果ꎬ采用水池实验ꎬ在水池中放置潜艇等比例仿真模型ꎬ通过换能器相对于目标物45ʎ发射LFM信号ꎮ其实验测试结果如图8所示ꎮ图8㊀实验回波信号Fig.8㊀Testechosignal㊀㊀由于水池实验中已经进行了降噪处理ꎬ可以看作自由场ꎬ直接进行声呐目标亮点模型的对比ꎮ仿真结果见图9ꎮ图9㊀仿真回波信号Fig.9㊀Simulatedechosignal㊀㊀由结果可知ꎬ仿真信号与水池实验中的模型回波信号在回波特性上基本相符ꎬ在计算后的同时间节点出现散射波ꎬ求取其相关频谱ꎬ结果如图10所示ꎮ图10㊀多亮点回波信号对比Fig.10㊀Multi ̄highlightechosignalcontrast㊀㊀由图10可得ꎬ在300Hzꎬ500Hz和800Hz时达到了频响峰值ꎬ在变化趋势和峰值位置上ꎬ仿真信号和实测信号基本一致ꎬ从而说明所建立的回波仿真达到了预期效果ꎮ4㊀结语本文构建了水下目标回波信号仿真模型ꎬ结合仿真后的海洋环境噪声和海洋混响ꎬ得出了水下目标的回波仿真ꎬ极大缩短了计算时间ꎬ经实验验证ꎬ与实际回波数据相比ꎬ达到了预期效果ꎮ不足之处是仿真仅模拟了水下目标的几何亮点回波ꎬ由实验回波可知ꎬ在几何回波后仍有不可忽略的弹性回波成分ꎬ如何对目标的弹性回波进行建模仿真ꎬ是后续工作的重点ꎮ参考文献[1]㊀柴鹏.主动声纳水下探测实时并行仿真系统[D].哈尔滨:哈尔滨工程大学ꎬ2016.[2]㊀张志彬.声纳平台水声信号处理研究与实现[D].石家庄:河北科技大学ꎬ2014.[3]㊀姜姝.水下目标回波几何亮点结构的形态学研究[D].哈尔滨:哈尔滨工程大学ꎬ2014.[4]㊀徐天杨ꎬ李秀坤ꎬ吴蔚ꎬ等.水下目标声散射角特征建模[J].指挥信息系统与技术ꎬ2016 7(5):55 ̄61.[5]㊀李整林.水平缓变浅海的绝热简正波相干混响理论[C]//中国声学学会2008年全国声学学术会议论文集ꎬ2008:120 ̄121.[6]㊀杨伏洲ꎬ范若楠ꎬ赵罡ꎬ等.基于大尺度目标强亮点散射的时反特性[J].计算机仿真ꎬ2016 33(7):40 ̄44.[7]㊀刘大勇.海底混响信号仿真研究[D].哈尔滨:哈尔滨工程大学ꎬ2013.[8]㊀刘媛昕ꎬ吴艳群ꎬ马树青ꎬ等.海洋环境对海面源噪声场的影响分析[J].南京大学学报:自然科学版ꎬ2017 53(4):638 ̄645.[9]㊀汤渭霖ꎬ范军ꎬ马忠成ꎬ等.«水中目标声散射»[J].声学学报ꎬ2018 43(5):873.[10]㊀吕艳梅ꎬ王洪锋ꎬ孙江生.一种多传感器数据融合仿真平台的设计[J].电光与控制ꎬ2004 11(1):22 ̄24.[11]㊀郭业才ꎬ赵俊渭.海洋环境噪声预报建模与算法研究[J].舰船科学技术ꎬ2004(4):26 ̄30.[12]㊀ELLISDD.Ashallow ̄waternormal ̄modereverberationmodel[J].JournaloftheAcousticalSocietyofAmeri ̄ca 1995 97(5):2804 ̄2814.[13]㊀向小梅ꎬ蒋楚鸥.潜艇与多亮点靶标回波展宽和亮点起伏特性研究[J].舰船电子工程ꎬ2016 36(2):129 ̄132.71㊀第2期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11
张晶晶 等:航空声呐仿真系统设计
1.2.2 吊放声呐仿真模块 吊放声呐仿真模块主要包括参数设定/读取模
块、信号生成模块、信号处理模块、显示处理模块。 参数设定/读取模块用于完成吊放声呐各类性能参 数、工作参数的设定,如工作方式、工作频率、信 号类型、脉冲宽度、工作量程、发射功率等;信号 生成模块根据目标的运动参数,结合人工设定或从 数据库中读取的目标信息、海洋环境信息等模拟吊 放声呐入水开机后接收到的数字信号;信号处理模 块按照实际装备的信号处理方式对接收到的声信 号进行处理,对目标的方位、距离、径向速度等参 数实施探测,探测结果送显示处理模块。 1.2.3 声呐浮标仿真模块
声呐浮标仿真模块主要包括参数设定/读取模 块、信号生成模块、信号处理模块、显示处理模块。
参数设定/读取模块用于完成声呐浮标各类性 能参数、工作参数的设定,包括浮标类型(被动全 向、被动定向、主动全向)、处理方式(LOFAR、 DIFAR、RANGER)设定;信号生成模块根据目标 的运动参数,结合人工设定或从数据库中读取的目 标信息、海洋环境信息等模拟产生声呐浮标入水开 机后接收到的数字信号;信号处理模块按照实际装 备的信号处理方式对接收到的声信号进行处理,对 目标的方位、距离、径向速度等参数实施探测,探 测结果送显示处理模块。
2012年第 2 期
声学与电子工程
总第 106 期
航空声呐仿真系统设计
张晶晶 乔斌 凌震莹 张雷 (第七一五研究所,杭州,310012)
摘要 在充分考虑吊放声呐和声呐浮标系统工作特性的基础上,设计了一套航空声呐仿真系统方案。该 系统能够在不同的工作环境下对不同的目标进行仿真,模拟实际环境下吊放声呐和声呐浮标对目标的探测过 程。
目标信息存 储/输出
仿真结束
图 3 航空声呐仿真系统运行流程图
图 4 探测到的目标亮点
表 2 精测结果
精测 时间 00:02:13
距离 (m) 1852
距离 (n mile)
1000
方位 (º)
90
速度 (m/s)
2.7
00:01:52 1919
1035
48
2.7
00:01:11 2015
1088
353.8
[4] 吴正国,夏立,尹为民. 现代信号处理技术[M]. 武汉: 武汉大学出版社,2003.
(上接第 13 页)
5 结论
本文建立的仿真系统充分考虑了实际装备的 工作情况,对各模块进行了仿真建模研究,实现了 预期的设计目标。仿真系统融合了系统仿真技术、 网络技术、水声信号处理技术,软件系统具有可移 植性、可扩展性,具有较好的应用价值。
海底散射强度与海底底质和掠射角有关。可用 下面函数近似表示其依赖关系:
Sb = Sb1 +10 lg sin2 θ
(6)
式中: Sb1 的数值由海底底质决定;θ 是掠射角。
混响面积
A = cτ Φr 2
(7)
其中: c 是声速,τ 是发射脉冲宽度, Φ 为等效波 束宽度, r 为距离。
Φ = 10 lg λ + 9.2 2πl
2 仿真建模
与实际的物理过程不同,本系统所处理的声呐 信号是根据目标信息、海洋环境信息等模拟产生 的。海洋是非常复杂的水声信道,不同海况、不同 海区及海底海面类型都会对信号传播带来不同的 影响,因此在对声呐信号建模时需要考虑各种不同 的海洋参数对声传播的影响。 2.1 传播损失模型
海洋中声传播损失依赖于海底、海水介质、声 速剖面、海深等很多物理参数。
仿真系统中,吊放声呐、声呐浮标根据需要分 别工作,并在启动对应的子系统后对目标、任务系 统进行设定,通过仿真,完成对目标的探测、搜索 和定位。系统具有可操作性、易维护性和可靠性。 系统运行流程如图 3 所示。
启动仿 真系统
使用流程如下: z 系统启动后,自动进入目标与环境仿真界面, 在该界面下可以通过人工设置或使用声呐装备、目 标特性、水声环境等数据库和模型完成目标和环境 仿真参数的设置; z 启动吊声或浮标仿真,进入吊声或浮标仿真界 面; z 设置相应的工作参数后开始仿真。
目标与环境仿真模块由目标/环境参数设定模 块、目标运动轨迹仿真模块、显示处理模块组成。 其中,目标/环境参数设定模块用来设定海洋环境参 数、潜艇的目标声特征和运动参数,包括目标所处 区域海底/海面参数、环境噪声、目标强度/辐射噪 声谱级、目标运动方向/速度等;目标运动轨迹仿真 模块用于生成目标位置;显示处理模块用于对目标 及鱼雷的运动轨迹进行显示处理。目标与环境仿真 模块供吊放声呐和声呐浮标共用,根据该模块设置 的海洋环境参数和目标参数在阵元阈对吊放声呐 或声呐浮标的原始声信号进行仿真。
图 1 系统硬件组成框图
1 系统概述与设计
1.1 系统概述 系统对吊放声呐和声呐浮标的实际工作全过
程进行了模拟,考虑了实际使用情况的所有复杂因 素,能够在不同的工作环境下对不同的目标进行仿 真,模拟航空声呐对目标的探测过程。本系统的仿 真结果及统计分析可以为实际作战提供重要的战 术指导,同时也可以通过此仿真环境对实际作战的 有关过程及数据进行仿真分析,来对作战效果进行 验证和检验。
2.7
(下转第 16 页)
13
杨晓斌 等:Wigner-Vill分布在舰船调制特征提取中的应用研究
幅度归一化
归一化幅度
图 9 中解调谱线谱较噪声分量幅度相差小,即 信噪比低,尤其是 60 Hz 调制频率不易分辨。而图 10 显示 WVD 零频切片解调具有很好的噪声抑制特 性,所得到的 30 Hz 和 60 Hz 对应的线谱非常清晰, 较传统的解调方法有很大的改善。
NL=−17lgf+6S+55
(9)
式中 f 为频率(kHz),S 为海况等级[4]。 2.5 接收信号输出信噪比
对于被动工作模式而言,输出信噪比为:
SNR=SL−TL−(NL−DI)
(10)
对于主动工作模式而言,输出信噪比为:
SNR=SL−2TL+TS−max((NL−DI),RL)(11)
3 仿真系统的运行及使用
(2)
其中 r 为距目标水平距离,km;α 为海水吸收系数,
dB/km,α = 0.05 f 1.4 ; kL 为近场传播异常,dB,
它与频率、海况和海底的类型有关。
当 R ≤ r ≤ 8R 时,传播损失 TL 近似为:
TL
= 15lg r
+αr
+
α
T
(
r H
−1) + 5lg H
+ 60 − kL
系统的仿真软件主要包括目标与环境仿真模 块(吊放声呐和声呐浮标共用)、吊放声呐仿真模 块、声呐浮标仿真模块。系统总体结构框图如图 2 所示。
图 2 系统总体结构框图
吊放声呐仿真模块和声呐浮标仿真模块分时 实现,通过各自的显示控制程序能够对两类反潜系 统的各种工作参数进行设定,两个模块均能够根据 已设定的参数对目标进行模拟探测,并计算出目标 的方位、距离、速度等参数(具体目标的定位参数 与系统的工作参数有关)。 1.2.1 目标与环境仿真模块
4 系统功能验证
对于上述系统,设置相应工作参数进行仿真。 预设目标各参数值如表 1 所示。图 4 所示为仿真界 面上探测到的目标亮点,表 2 为对目标进行精测得 到的精测结果,最上一行是最近一次的精测结果。 如表所示,仿真结果基本与目标预设值一致。
表 1 目标参数预设值
序号 目标距离(m/s) 目标速度(kn) 目标方位(º)
定义距离参数
R = [1/ 3(H + L)]1/2
(1)
其中 H 是海水深度,m;L 是浅海表面混合层深度, m。
根据 Marsh 和 Schulkin 的半经验公式[1,2]可以得 到传播损失的近似表达如下。
当目标距离 r<R 时,传播损失 TL 近似为:
TL = 20 lg r + α r + 60 − kL
(8)
其中 λ 为信号波长, l 为基阵孔径。
12
张晶晶 等:航空声呐仿真系统设计
2.3 水声目标特性模型 水声目标辐射噪声仿真模型主要建立典型潜
艇目标的辐射噪声特性随不同工况变化的特性曲 线,仿真的特性主要包括:辐射噪声的连续谱谱级、 线谱特征等。
水声目标回波特性仿真模型主要建立典型潜 艇目标的目标强度及其空间分布特性等。 2.4 海洋环境噪声
系统可以单机运行,也可以通过网络与航空搜 潜战术系统、潜艇仿真系统、航空攻潜战术系统互 联,分别实现搜潜方案和搜潜结果、目标信息和搜 潜信息、搜潜结果的传输。 1.2 系统设计
系统运行于航空声呐仿真处理机上,硬件主要 包括主控板、阵列信号处理板、液晶显示器、键盘、 鼠标等,系统组成框图如图 1 所示。
关键词 吊放声呐;声呐浮标;系统仿真
航空声呐的作战效能、目标发现能力、目标探 测精度等各种战术指标的评估以及航空反潜战术 的推演等需要一个完整的航空反潜仿真平台。航空 声呐仿真系统作为航空反潜仿真平台的一个重要 组成部分,主要完成吊放声呐、声呐浮标各种工作 参数的模拟、仿真,并在不同的工作环境下对不同 目标进行仿真,模拟实际环境下航空声呐对目标的 探测、搜索并为后续鱼雷等火力攻击提供目标指 示。本文给出一种航空声呐仿真系统方案。
(3)
其中,αT 为浅海衰减系数,它与频率、海况和海底
的类型有关。
当与目标距离 r>8R 时,传播损失 TL 近似为:
TL
= 10 lg r
+αr
+ αT
(r H
−1) +10 lg H
+ 64.5 − kL
(4)
2.2 混响模型
Chapman 和 Harris 等人得到了计算海面反向散
射强度的经验公式[3],该经验公式给出了海面反向