一级直线倒立摆系统模糊控制器设计---实验指导书
一阶倒立摆模糊控制实验报告
一阶倒立摆模糊控制实验报告一、实验目的本实验旨在通过模糊控制方法来控制一阶倒立摆系统,实现摆杆保持竖直的稳定控制。
二、实验原理1. 一阶倒立摆系统一阶倒立摆系统由一个垂直的支撑杆和一个在杆顶端垂直摆动的杆组成。
系统的输入为杆的控制力矩,输出为杆的角度。
系统的动力学方程可以表示为:Iθ''(t) + bθ'(t) + mgl sin(θ(t)) = u(t)其中,I为倒立摆的转动惯量,b为摩擦阻尼系数,θ为倒立摆的角度,m为倒立摆的质量,l为杆的长度,g为重力加速度,u为输入的控制力矩。
2. 模糊控制方法模糊控制方法是一种基于模糊逻辑的控制方法,通过将模糊集合与模糊规则相结合,构建模糊控制器来实现对系统的控制。
在本实验中,可以使用模糊控制器来实现倒立摆系统的稳定控制。
三、实验步骤1. 搭建实验平台,包括倒立摆系统、传感器和执行器。
2. 训练模糊控制器a. 定义模糊集合:根据角度误差和角速度误差定义模糊集合,并确定模糊集合的划分方式。
b. 构建模糊规则:根据经验或系统建模,确定模糊规则。
c. 设计模糊控制器:根据模糊集合和模糊规则,设计模糊控制器,包括模糊推理和模糊解模块。
d. 调整模糊控制器参数:根据系统响应实验,根据控制效果调整模糊控制器参数。
3. 实施模糊控制a. 读取传感器数据:获取倒立摆的角度和角速度数据。
b. 计算控制器输出:根据模糊控制器和传感器数据计算控制力矩的输出。
c. 执行控制器输出:将控制力矩作用在倒立摆上。
4. 监测系统响应:实时监测倒立摆的角度和角速度,判断控制效果。
5. 调整模糊控制器参数:根据实验监测结果,调整模糊控制器参数,以提高控制效果。
四、实验结果分析通过实验,我们可以观察到倒立摆系统在模糊控制下的稳定控制效果。
通过实时监测倒立摆的角度和角速度,可以验证控制器的性能。
实验结果可以通过绘制控制力矩输入和倒立摆角度响应曲线,以及观察系统的稳态误差来分析。
便携式一级倒立摆实验指导(第二版)最终版DOC
Reinovo便携式直线一级倒立摆实验指导书(第二版)深圳市元创兴科技有限公司2011年08月目录第一章开发环境及其系统组成 (1)第二章系统控制原理简介 (2)第三章便携式倒立摆建模及仿真 (3)第四章实验 (13)实验一运动控制基础实验 (13)1.1 编码器原理 (13)1.2 编码器使用实验 (14)实验二根轨迹控制实验 (17)2.1 根轨迹分析 (17)2.2 根轨迹校正及仿真 (18)2.3 仿真模型搭建 (22)2.4 根轨迹实时控制实验 (27)实验三频率响应控制实验 (30)3.1 频率响应分析 (30)3.2 频域控制器设计及仿真 (31)3.3 仿真实验 (35)3.4 直线一级倒立摆频率响应校正法实时控制实验 (38)实验四 PID控制实验 (40)4.1 PID控制分析 (40)4.2 PID控制参数设定及仿真 (40)4.3 PID控制实时控制实验 (44)实验五状态空间极点配置控制实验 (47)5.1 状态空间分析 (47)5.2 极点配置及仿真 (48)5.3 极点配置控制实验 (55)实验六线性二次最优控制(LQR)控制实验 (57)6.1 线性二次最优控制(LQR)基本原理及分析 (57)6.2 LQR控制参数调节及仿真 (58)6.3 直线一级倒立摆LQR控制实验 (60)实验七Bang-Bang起摆控制算法实验 (62)7.1 Bang-Bang起摆控制算法 (62)7.2 Bang_Bang控制算法实物控制 (63)实验八能量自摆起实验 (65)8.1 基于能量反馈的起摆算法 (65)8.2 能量自摆起实物控制 (66)第一章开发环境及其系统组成一开发环境要求硬件要求:1、Pentium II、Pentium III、AMD Athlon或者更高;2、内存至少256MB,推荐512MB 以上;3、至少有一个USB2.0接口;软件要求:1、Microsoft Windows 98、Microsoft Windows 2000、Microsoft Windows XP;2、Microsoft Visual C++ 6.0;3、Matlab 6.5。
直线型一阶倒立摆毕业设计说明书

直线型一阶倒立摆毕业设计说明书本科学生毕业设计直线型一阶倒立摆设计与制作(控制部分)院系名称:机电工程学院专业班级:机械电子09-2学生姓名:王兴隆指导教师:齐建家职称:讲师黑龙江工程学院二○一三年六月The Graduation Design for Bachelor's DegreeLinear 1--Stage Inverted Pendulum Design and Manufacture(Control Section)Candidate:Wang XinglongSpecialty:Mechanical and ElectronicEngineeringClass:09-2Supervisor:Lecturer Qi JianjiaHeilongjiang Institute of Technology2013-06·Harbin摘要本文首先对倒立摆现阶段的种类、反应的主要控制问题、各个领域上的应用、国内外现状以及现阶段的主要控制方法做了简要的介绍,进而提出了本次设计的任务与要求。
其次是倒立摆系统设计制作。
在硬件设计制作中在能满足控制要求的前提下,主要按照结构简单,价格低廉,功耗低的标准,选择小车各个功能模块的芯片,设计各部分电路的。
本次设计采用ATMEGA16单片机作为小车的控制核心;采用能耗低、性能优越的直流减速电机;采用全球首例整合性6轴运动处理组件MPU6050测量角速度和角加速度。
在此基础上,结合卡尔曼滤波与PID控制算法进行软件程序设计。
最后,小车的软件硬件结合,进行系统的调试,数据记录,结果分析,实现了两轮小车系统的动态自平衡功能。
在车身35cm以下的情况下,整个系统的抗干扰能力很强。
关键词:一阶倒立摆;Atmega16;MPU6050;PID;卡尔曼滤波ABSTRACTIn this article, firstly the brief introduction of the types of inverted pendulum , the main control problems of the reaction, application in varies fields, o verseas and domestic research status and different control ways of inverted pendulum were given. And then the task and the requirement of the design were promoted.Secondly, it is linear 1--stage inverted pendulum design and manufacture. I t could satisfy the control requirements on the premise.It depended on if the structure is simple, the price is low, low powerconsumption when we chose the chips and design each part of the circuits i n the hardware design and production. In this design we use the ATMEAGA16 MCU as the control core and low power consumption better property DC geared motor. We use the world's first integrated 6 axis motion processing components MPU6050 measuring angular velocity and angular acceleration. Based on the hardware, we combined with kalman filter and PID control algorithm and operate in the software design.Finally, we combine the software and hardware, debug the system, and analyzethe results.It realized the balancing function of the two rounds car system.The anti-interference ability of the whole system is very strong under 35cm height.Key words:1--Stage Inverted Pendulum; Atmega16; MPU6050;PID;Kalman目录摘要..................................................................................................................................... Abstract (I)目录 (II)第1章绪论 01.1 概述 01.2 倒立摆系统的种类 01.3 倒立摆系统的研究集中地 01.4 倒立摆系统反应的主要控制问题 01.5 倒立摆系统在各个领域的应用 (1)1.6 倒立摆系统的研究现状 (1)1.7 倒立摆系统的主要控制方法 (2)1.8 设计内容 (2)第2章总体方案设计 (3)2.1 设计任务 (3)2.2 基本原理(控制部分) (3)2.3 设计要求 (3)2.4 系统功能框图 (3)2.5 本章小结 (4)第3章倒立摆系统原理篇 (5)3.1 车模平衡控制 (5)3.2 车模角度和角速度测量 (6)3.3 车模速度控制 (7)3.4 本章小结 (11)第4章倒立摆车控制系统设计 (12)4.1 最小系统要求 (12)4.2 芯片选型 (12)4.2.1 芯片特点 (12)4.2.2 引脚说明 (14)4.3 I/O接口分配 (15)4.3 驱动模块 (15)4.5 MPU6050模块 (16)4.6 电源模块 (17)4.7 系统原理图 (17)4.8 本章小结 (17)第5章倒立摆控制程序与算法设计 (19)5.1 系统软件设计说明 (19)5.2 PID控制算法 (19)5.2.1 PID控制算法简介 (19)5.2.2 PID控制算法特点 (19)5.2.3 电机控制算法程序 (20)5.3 卡尔曼滤波 (21)5.3.1 卡尔曼滤波的介绍 (21)5.3.2 卡尔曼滤波在倒立摆系统上的应用 (21)5.4 主程序设计软件流程 (22)5.4 显示子程序设计 (24)5.5 本章小结 (25)第6章系统调试与结果分析 (26)6.1 硬件测试 (26)6.2 联机调试 (26)6.2.1 参数设置 (26)6.2.2角度参数整定 (27)6.2.3速度参数整定 (27)6.3 测试仪器与方法 (28)6.5 本章小结 (28)结论 (29)参考文献 (30)附录1 (33)材料清单 (33)附录 2 (343)原理图 (34)附录3 (35)主程序 (35)子程序 (43)第1章绪论1.1 概述倒立摆是进行控制理论研究的典型平台。
直线一级倒立摆系统实验指导书自动控制综合实验(2)
直线一级倒立摆系统实验指导书—自动控制综合实验(2)基于固高科技生产的GLIP2001直线一级倒立摆北京邮电大学自动化学院林雪燕2015年5月1 实验目的和要求自动控制理论实验主要目的是通过实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计方法,掌握常用工程软件使用,如MATLAB、LabVIEW等。
本实验指导书以典型控制理论实验设备直线一级倒立摆为被控对象,通过控制摆杆角度和小车位移,使学生理解和掌握自动控制理论的基本原理和应用方法。
实验共覆盖了自动控制理论中的机理法建模、时域法分析和校正、根轨迹法分析和校正、频域法分析和校正、复合校正、状态空间分析、状态反馈、LQR控制等内容。
本实验指导书主要针对现代控制理论之用。
通过选择不同方法,确定不同参数,观察实验效果,可以深入理解控制方法之间的差异以及参数对控制系统性能指标的影响。
1.1 实验准备实验准备是顺利完成实验内容的必要条件。
实验准备的主要内容包括如下的几个方面: (1) 复习实验所涉及的MATLAB 软件和自动控制理论知识;(2) 熟悉实验的内容和步骤;(3) 根据实验要求,作必要的理论分析与推导,做好实验预习。
1.2 实验报告内容实验报告包含以下的内容。
可根据实验的具体情况和要求进行适当调整。
(1) 实验名称,目的,要求,设备等(2) 有软仿真结构图、结果及分析;(2) 实验数据及图表齐全;(3) 实验结果及分析;(4) 回答思考题;(5) 实验研究的体会和收获,对实验的意见或建议。
1.3 安全注意事项(1)实验之前一定要做好预习。
(2)一定要将摆杆牢固安装到位。
(3)为了避免设备失控时造成人身伤害,操作时人员应该与设备保持安全距离,不要站在摆的两端。
(4)实验前,确保倒立摆放置平稳;要检查摆杆的可能摆动范围,确保不会发生碰撞。
(5)如果发生异常,马上关闭电控箱电源。
(6)系统运行时禁止将手或身体的其他部位伸入小车运行轨道之间。
直线一级倒立摆系统的状态空间极点配置控制设计详细实验报告
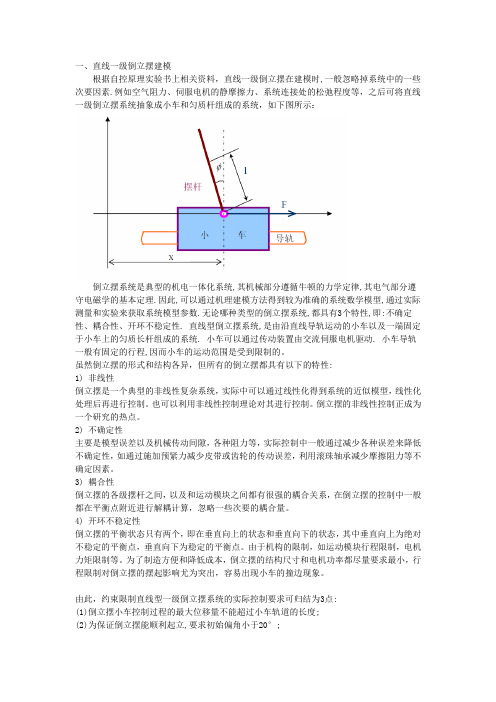
一、直线一级倒立摆建模根据自控原理实验书上相关资料,直线一级倒立摆在建模时,一般忽略掉系统中的一些次要因素.例如空气阻力、伺服电机的静摩擦力、系统连接处的松弛程度等,之后可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示:倒立摆系统是典型的机电一体化系统,其机械部分遵循牛顿的力学定律,其电气部分遵守电磁学的基本定理.因此,可以通过机理建模方法得到较为准确的系统数学模型,通过实际测量和实验来获取系统模型参数.无论哪种类型的倒立摆系统,都具有3个特性,即:不确定性、耦合性、开环不稳定性. 直线型倒立摆系统,是由沿直线导轨运动的小车以及一端固定于小车上的匀质长杆组成的系统. 小车可以通过传动装置由交流伺服电机驱动. 小车导轨一般有固定的行程,因而小车的运动范围是受到限制的。
虽然倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性:1) 非线性倒立摆是一个典型的非线性复杂系统,实际中可以通过线性化得到系统的近似模型,线性化处理后再进行控制。
也可以利用非线性控制理论对其进行控制。
倒立摆的非线性控制正成为一个研究的热点。
2) 不确定性主要是模型误差以及机械传动间隙,各种阻力等,实际控制中一般通过减少各种误差来降低不确定性,如通过施加预紧力减少皮带或齿轮的传动误差,利用滚珠轴承减少摩擦阻力等不确定因素。
3) 耦合性倒立摆的各级摆杆之间,以及和运动模块之间都有很强的耦合关系,在倒立摆的控制中一般都在平衡点附近进行解耦计算,忽略一些次要的耦合量。
4) 开环不稳定性倒立摆的平衡状态只有两个,即在垂直向上的状态和垂直向下的状态,其中垂直向上为绝对不稳定的平衡点,垂直向下为稳定的平衡点。
由于机构的限制,如运动模块行程限制,电机力矩限制等。
为了制造方便和降低成本,倒立摆的结构尺寸和电机功率都尽量要求最小,行程限制对倒立摆的摆起影响尤为突出,容易出现小车的撞边现象。
由此,约束限制直线型一级倒立摆系统的实际控制要求可归结为3点:(1)倒立摆小车控制过程的最大位移量不能超过小车轨道的长度;(2)为保证倒立摆能顺利起立,要求初始偏角小于20°;(3)为保证倒立摆保持倒立的平衡态,要求控制系统响应速度足够快。
直线一级倒立摆系统实验报告
直线一级倒立摆系统实验报告1. 实验目的:通过对直线一级倒立摆系统进行分析,掌握系统的基本原理、参数设置和控制策略;提高学生实际动手能力和科学实验能力。
2. 实验内容:(1)搭建直线一级倒立摆系统实验平台;(2)设置系统的动力学模型,采集系统的状态变量;(3)根据系统的特性设计控制策略,实现系统的稳定控制;(4)记录实验数据,并进行数据处理和分析。
3. 实验原理:直线一级倒立摆系统是一种经典的非线性控制系统,其原理和稳定性分析可以使用动力学建模方法来描述。
系统由直线弹簧、质量块、直线导轨和质量块的摆杆组成。
当摆杆处于垂直状态时,系统处于平衡状态;当摆杆被扰动后,系统进入不稳定状态,需要通过控制策略来实现其稳定控制。
在实验中,我们选取了单摆系统作为直线一级倒立摆系统的原形。
单摆系统由一个质点和一个线性弹簧组成,其状态变量为质点的位置和速度。
当质点处于平衡位置时,系统拥有稳定状态;当质点被扰动后,系统进入不稳定状态,需要通过控制策略来实现其稳定控制。
因此,我们可以使用单摆系统来研究直线一级倒立摆系统的控制策略。
4. 实验步骤:(1)搭建实验平台:搭建直线一级倒立摆系统实验平台,包括直线导轨、摆杆、质点、力传感器、位移传感器和控制电路等。
将质点放置在导轨上,并用摆杆将其固定在弹簧上。
使用力传感器和位移传感器来测量系统的状态变量。
(2)设置系统模型:对实验平台的动力学模型进行建模,将系统的状态变量与控制策略联系起来。
(3)设计控制策略:根据系统的特性设计相应的控制策略,使系统保持稳定状态。
常用的控制策略包括模型预测控制、PID控制、滑模控制等。
(4)记录实验数据:实验过程中需要记录系统的状态变量和控制参数,并进行数据处理和分析,得到实验结论。
5. 实验结果分析:通过对直线一级倒立摆系统的实验研究,我们发现系统的稳定控制需要根据其特性和实际情况来确定相应的控制策略。
在实验中,我们采用了模型预测控制策略,通过对系统的状态变量进行预测和调节,成功实现了系统的稳定控制。
直线一级倒立摆建模与控制
期望特征多项式为
s 2 k2 20 s 20 k1 k2 1
* 由设计者选取,考虑“引入状态反馈向量后系统特 1*、2
* f * s s 1* s 2 =s2 (1* 2* )s 1*2*
征多项式”和“期望特征多项式”的系数相等即可求出状态反 馈向量。
,线性化运动方程。
倒立摆系统单输入-单输出传递函数模型
线性化后运动方程(参考):
I ml mgl mlx
2
以小车加速度为输入、摆杆角度为输出,令
ax
拉普拉斯变换后系统传递函数模型(参考):
s ml G s A s I ml 2 s 2 mgl
双击“Controller1”,输入选取的4个闭环极点对应的增益,运行仿真后双击 “Scope1”观测响应曲线,其中小车位置应该很好的收敛到0.01,小车速度、摆杆角
度和角速度应该收敛到0。若响应曲线效果不好则需重新选取闭环极点。
状态空间极点配置实物控制
选取了合适的4个闭环极点并通过了仿真测试后即可进行倒立摆系统实物控制。 进入 MATLAB Simulink 实时控制工具箱“Googol Education Products”打 开 “Inverted Pendulum\Linear Inverted Pendulum\Linear 1-Stage IP Swing-Up Control”中的“Swing-Up Control Demo,如下图。
状态空间极点配置仿真控制
参考上述实例,选取倒立摆系统的4个闭环极点,进入 MATLAB Simulink 实时 控制工具箱“Googol Education Products”打开“Inverted Pendulum\Linear Inverted Pendulum\Linear 1-Stage IP Experiment\ Poles Placement Experiments”中的“Poles Control Simulink”,如下图。
基于模糊控制的一级倒立摆控制系统设计【毕业作品】
BI YE SHE JI(20 届)基于模糊控制的一级倒立摆控制系统设计所在学院专业班级自动化学生姓名学号指导教师职称完成日期年月II摘要倒立摆系统是研究控制理论的典型实验装置,具有价格低廉,结构简单,参数易于调整等优点。
但是倒立摆同时也是一个典型的快速,非线性,多变量,本质不稳定系统,对于其稳定性的控制绝非易事。
也正因为如此,对于倒立摆系统控制方法的研究和开发才具有重要和深远的意义。
目前适用此系统的控制理论包括变结构控制,非线性控制,目标定位控制,智能控制等。
本文根据一级直线倒立摆系统,建立了数学模型,依据模糊控制的相关规则设计了模糊控制规则,并从位移和角度观点出发设计了双模糊控制器,经过仿真调试对重要参数进行不断的调试和优化,最终实现了“摆杆不倒,小车稳住”的总体目标。
对于实物实验系统,本文对构成倒立摆运动控制系统的电机,编码器和运动控制模块进行了比较选择,选择了交流伺服电机,增量式光电编码器和基于DSP技术的运动控制器作为主要的硬件组合,该运动控制器具有良好的性能,可以保证控制的精度。
关键词:倒立摆,模糊控制,系统设计,仿真,稳定IIAbstractInverted pendulum system is the study of the typical experiment device control theory, which is inexpensive, simple structure and easy to adjust the parameters. But it is also a system that typical rapid, nonlinear, many variables, and its essence is not stable, for its stability control is not going to be easy. Also because of this inverted pendulum system control method of the research and development are important and profound significance. At present the system for the control theory including variable structure control, nonlinear control, the goal positioning control, intelligent control, etc.According to the level of linear inverted pendulum system, this paper established the mathematical model, based on the fuzzy control rules we designed its fuzzy control rules, and from the view point of view design displacement and the dual fuzzy controller, through the simulation test of continuing the important parameters of debugging and optimization, and finally achieved "swinging rod, the car is not steady overall goal.For physical experiment system, this paper constitutes inverted pendulum motion control system of motor, encoder and motion control module are compared choice. Choose the ac servo motor, the solid-axes photoelectric encoder and the motion controller based on DSP technology as the main combination of hardware, this controller has good performance, and can ensure the precision of the control.Key words: inverted pendulum,Fuzzy control,System design ,The simulation,stabilityII目录摘要 (I)Abstract.......................................................................................................................................... I I 目录 (III)第一章引言 (1)1.1课题研究目的及意义 (1)1.3倒立摆系统介绍 (3)第二章倒立摆系统建模 (6)第三章模糊控制 (11)3.1概念 (11)第四章基于模糊控制的一级倒立摆系统设计 (15)4.1控制系统部件选择 (15)4.1.1位置传感器选择 (15)4.1.3运动控制模块 (17)4.2 模糊控制器设计 (18)4.2.1 确定模糊控制器的结构 (19)4.2.2位置模糊控制器的设计 (19)4.2.3角度模糊控制器设计 (27)4.3simulink仿真 (28)4.3.1将simulink与模糊控制器相关联 (28)4.3.2进行仿真 (32)结论 (39)III参考文献 (40)致谢 (41)III第一章引言1.1课题研究目的及意义倒立摆系统作为一个本身绝对不稳定的非线性系统,兼具高阶次、多变量、强耦合的特点。
一级直线型倒立摆的模糊控制控制
一级直线型倒立摆的模糊控制一、问题的描述在忽略了空气流动之后, 可将倒立摆系统抽象成小车和匀质杆组成的系统, 如图1所示. 记小车质量为M, 摆杆质量为m, 摆杆转动图1 倒立摆系统中心到杆质心的距离为l, 作用在系统上的外力为F , 重力加速度为g, θ为摆杆偏角, 即摆杆与竖直向上方向的夹角,取顺时针方向为正方向, x 为小车水平方向位移, 取导轨中点为零点, 水平向右为正方向, 水平向左为负方向.图2为隔离体受力图。
摆杆围绕中心A 点转动方程为22d J V l sin H l cos dtθθθ=-。
式中,J 为摆杆围绕重心A 的转动惯量。
摆杆重心A 沿x 轴方向运动方程为2A 2d x m Hdt=,即22dm(x lsin )H dtθ+=。
摆杆重心A 沿y 轴方向运动方程为2A 2d y mV m gdt=-,即22dm(l c o s )V m g dtθ=-。
小车沿x 轴方向运动方程式为22=-d x M F Hdt。
以上方程为车载倒立摆系统运动方程组。
因为还有sin θ和cos θ项,所以为非线性微分方程组。
图2 隔离体受力图中间变量不易相消。
把J 的表达式代入,联合几个方程式得到如下的非线性方程组:'2''2'2''''sin cos *(sin )*(43*cos ()*(sin cos )θθθθθθθθθθ+--=-++-=+g F m l l m m M F m l x M m设,''1234[(),(),(),()][,,,]θθ==X t t x t x t x x x x则有如下非线性状态方程组:'122'1121221'342''21214sin cos *(sin )*(43*cos ()*(sin cos )=+--=-+=+-=+x x g x x F m lx x x l m x m M x x F m l x x x x x M m二,控制系统的matlab 实现 实现的步骤为: 1.划分模糊空间2.用上述的每个离散状态空间点X1, X2,…,Xn 来线性化线性车棒模型,选择合适的LQR 控制参数Q ,R ,N ,设计出线性最优控制器K1, K2,…,Kn 。
一级倒立摆实验报告
一级直线倒立摆极点配置控制实验一、实验目的1.运用经典控制理论控制直线一级倒立摆,包括实际系统模型的建立、根轨迹分析和控制器设计、PID 控制分析等内容。
2.熟悉利用极点配置方法来进行倒立摆实验的原理方法。
3.学习MATLAB工具软件在控制工程中的应用。
3.掌握对实际系统进行建模的方法,熟悉利用MATLAB 对系统模型进行仿真,利用学习的控制理论对系统进行控制器的设计,并对系统进行实际控制实验,对实验结果进行观察和分析,非常直观的感受控制器的控制作用。
二、实验设备计算机及MATLAB相关软件元创兴倒立摆系统的软件元创兴一级直线倒立摆系统,包括运动卡和倒立摆实物倒立摆相关安装工具三、倒立摆系统介绍倒立摆是进行控制理论研究的典型实验平台。
由于倒立摆系统的控制策略和杂技运动员顶杆平衡表演的技巧有异曲同工之处,极富趣味性,而且许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等等,都可以通过倒立摆系统实验直观的表现出来。
学习自动控制理论的学生通过倒立摆系统实验来验证所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。
倒立摆不仅仅是一种优秀的教学实验仪器,同时也是进行控制理论研究的理想实验平台。
由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法,相关的科研成果在航天科技和机器人学方面获得了广阔的应用。
四、倒立摆工作原理和物理模型以及数学模型(简述)1、工作原理:数据采集卡(也称运动控制卡,安装于计算机机箱的PCI插槽上)采集到旋转编码器数据和电机尾部编码器数据,旋转编码器与摆杆同轴,电机与小车通过皮带连接,所以通过计算就可以得到摆杆的角位移以及小车位移,角位移差分得角速度,位移差分可得速度,然后根据自动控制中的各种理论转化的算法计算出控制量。
控制量由计算机通过运动控制卡下发给伺服驱动器,由驱动器实现对电机控制,电机尾部编码器连接到驱动器形成闭环,从而可以实现闭环控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一级直线倒立摆系统模糊控制器设计实验指导书目录1 实验要求................................................................................. . (3)1.1 实验准备................................................................................. . (3)1.2 评分规则................................................................................. . (3)1.3 实验报告容................................................................................. .. (3)1.4 安全注意事项................................................................................. .. (3)2 倒立摆实验平台介绍................................................................................. .. (4)2.1 硬件组成................................................................................. . (4)2.2 软件结构................................................................................. . (4)3 倒立摆数学建模(预习容) .............................................................................. (6)4 模糊控制实验................................................................................. (8)4.1 模糊控制器设计(预习容)............................................................................... (8)4.2 模糊控制器仿真................................................................................. (12)4.3 模糊控制器实时控制实验................................................................................. .. (12)5 附录:控制理论中常用的MATLAB 函数................................................................................. (13)6 参考文献............ .................................................................... (14)1 实验要求1.1 实验准备实验准备是顺利完成实验容的必要条件。
实验准备的主要容包括如下的几个方面:(1)复习实验所涉及的MATLAB 软件和模糊控制理论知识;(2)熟悉实验的容和步骤;(3)根据实验要求,作必要的理论分析与推导。
1.2 评分规则实验满分为100 分,其中实验考勤及实验态度占15% ,实验预习占25% ,实验报告占60% (其术容占50% ,报告书写占10% )。
(1)实验考勤与实验态度实验考勤和实验态度主要针对课的学时进行考核。
(2)实验预习报告实验预习容分为两大部分,即倒立摆数学建模和模糊控制的预习容。
(3)实验报告的技术容实验报告的技术容主要包括实验数据的记录与分析和实验思考题的解答。
(4)实验报告书写实验报告书写水平主要考虑文字表达水平(要求层次分明、表述清晰、简洁明了)和规程度(如图是否有坐标、单位和标题、公式书写及编号是否规等)。
实验报告的书写不仅体现了作者的文字功底,而且反映了作者的治学态度。
提示1:报告正文原则上不超过10 页。
提示2:一旦发现抄袭行为,抄袭者和被抄袭者均按作弊处理。
1.3 实验报告容实验报告包含以下的容。
可根据实验的具体情况和要求进行适当调整。
(1)理论分析的主要步骤;(2)仿真和硬件实物调试结果及分析(包括Matlab 程序或仿真模型,实物调试框图);(3)回答思考题;(4)总结实验心得及对实验的意见或建议。
1.4 安全注意事项(1)实验之前一定要做好预习。
(2)为了避免设备失控时造成人身伤害,操作时人员应该与设备保持安全距离,不要站在摆的两端。
(3)实验前,确保倒立摆放置平稳;要检查摆杆的可能摆动围,确保不会发生碰撞。
(4)如果发生异常,马上关闭电控箱电源。
(5)系统运行时禁止将手或身体的其他部位伸入小车运行轨道之间。
2 倒立摆实验平台介绍倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,是自动控制理论中的典型被控对象。
它深刻揭示了自然界一种基本规律,即一个自然不稳定的被控对象,运用控制手段可使之具有一定的稳定性和良好的性能。
许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。
本实验以固高科技公司的单级直线倒立摆为研究对象。
倒立摆实验平台分为硬件和软件两大部分。
2.1 硬件组成倒立摆硬件系统由倒立摆本体、计算机(含运动控制卡)、电控箱(包括交流伺服机驱动器、运动控制卡的接口板、直流电源等)三大部分组成。
倒立摆系统的本体由被控对象(小车和摆杆)、传感器(角度传感器)和执行机构(松下伺服电机及其传动装置)组成。
(1)被控对象倒立摆的被控对象为摆杆和小车。
摆杆通过铰链连接在小车上,并可以围绕连接轴自由旋转。
通过给小车施加适当的力可以将摆杆直立起来并保持稳定的状态。
(2)传感器倒立摆系统中的传感器为光电编码盘。
旋转编码器是一种角位移传感器,它分为光电式、接触式和电磁感应式三种,本系统用到的就是光电式增量编码器。
光电式增量编码器由发光元件、光电码盘、光敏元件和信号处理电路组成。
当码盘随工作轴一起转动时,光源透过光电码盘上的光栏板形成忽明忽暗的光信号,光敏元件把光信号转换成电信号,然后通过信号处理电路的整形、放大、分频、记数、译码后输出。
光电式增量编码器的测量精度取决于它所能分辨的最小角度α,而这与码盘圆周所分狭缝的线数有关:α=360°/ n ,其中n 编码器线数。
对于电机编码器,在倒立摆使用中需要把编码器读数转化为小车的水平位置。
(3)执行机构倒立摆系统的执行机构为松下伺服电机和与之连接的皮带轮。
电机的转矩和速度通过皮带轮传送到小车上,从而带动小车的运动。
电机的驱动由与其配套的伺服驱动器提供。
电机的控制是通过固高公司的GT 系列运动控制器实现的。
该控制器可以同步控制四个运动轴,实现多轴协调运动。
运动控制器以计算机为主机,提供标准的ISA 总线或PCI 总线接口,并且可以提供RS232 串行通讯和PC104 通讯接口。
运动控制器同时具有A/D 信号采集功能,从而能够将光电编码盘的信号传递到计算机。
倒立摆系统中的计算机、运动控制卡、伺服驱动器、倒立摆本体(包含摆杆、小车、伺服电机、光电码盘)几大部分组成了一个闭环系统。
光电码盘1将小车的位移、速度信号反馈给伺服驱动器和运动控制卡,而光电码盘2 将摆杆的位置、速度信号反馈回控制卡。
计算机从运动控制卡中读取实时数据,确定控制决策(小车向哪个方向移动、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,带动小车运动,保持摆杆平衡。
2.2 软件结构倒立摆实验以MathWorks 公司的MATLAB/Simulink 软件及其实时工具箱(Real- TimeWorkshop[3],简称RTW)为软件平台,实现倒立摆控制器的纯软件仿真和硬件环(Hardware-in-the-Loop)仿真实验(实物调试)。
MATLAB/Simulink 是目前最为广泛使用的控制系统分析与控制器设计的软件。
MATLAB 主要是以语句的形式实现仿真的功能,比较简洁,执行速度比较快;Simulink 是以方框图的方式构建模型进行仿真,形象直观,简单易学。
关于如何使用MATLAB/ Simulink 进行控制系统的分析,请参考相关参考资料。
附录给出了控制系统设计过程中常用到的指令。
MATLAB/Simulink 主要是通过纯软件的方式实现系统的仿真。
这种仿真方式比较便捷,但由于一个系统的数学模型与真实的系统总存在一定的差异,特别是复杂的系统,所以纯软件的仿真(以下简称“软仿真”)往往精度不高。
近年来,硬件在环仿真逐步成为控制系统设计与仿真的主流,其在航空航天控制和汽车控制领域运用得尤为广泛。
硬件在环仿真(又称半实物仿真)是将软件和硬件以实时的方式连接在一起进行仿真实验,不仅实现方便,而且可靠性高。
以倒立摆硬件在环仿真为例,控制器的算法由Simulink 软件模块实现,而被控对象(倒立摆小车和摆杆)、传感器(编码盘)、执行机构(电机及其驱动)等是真实的硬件。
MATLAB/Simulink 仿真软件与硬件之间的连接是通过以RTW 实时工具箱为核心的软件组和它们所支持的数据采集卡等硬件实现的。
RTW 将MATLAB/Simulink 中的软件根据硬件系统的特点编译成可执行文件。
该文件运行在独立的另一台计算机、数字信号处理器或同一计算机CPU 优先级最高的区域,实时地将指令发送给数据采集卡,同时又将数据采集卡采集到的传感器的信息反馈给MATLAB/Simulink 的软模型。
硬件在环仿真有多种实现方式。
本实验采用Real-Time Windows Target[4]的方式,即目标机(运行实时可执行文件的机器)和监控机(运行MATLAB/Simulink 软件实行监控的机器)为同一计算机的方式。
MATLAB/Simulink 运行在Windows 操作系统中,而编译的可执行文件运行在CPU 优先级最高的区域。
数据采集卡为固高公司的GT-400-SV 运动卡。
该卡不仅实现传感器信号的采集功能,而且能够依据倒立摆控制信号的要求,计算驱动电机需要的输入信号,经过功率箱放大,驱动伺服机。