GPIO 和看门狗使用例子说明
GPIO用法及应用流程
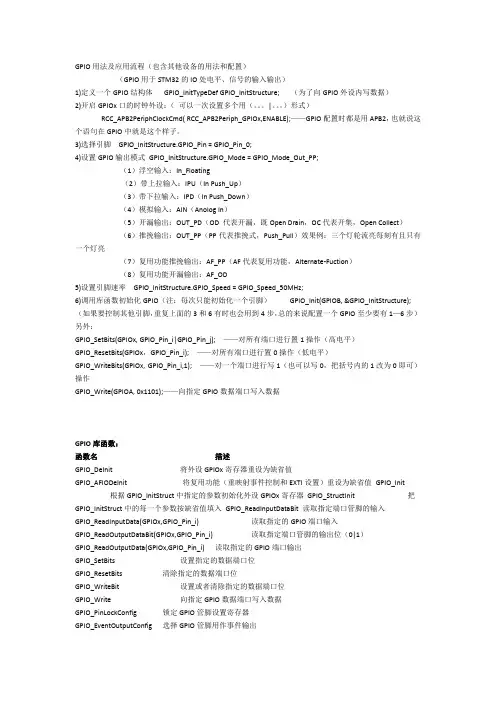
GPIO用法及应用流程(也含其他设备的用法和配置)(GPIO用于STM32的IO处电平、信号的输入输出)1)定义一个GPIO结构体GPIO_InitTypeDef GPIO_InitStructure; (为了向GPIO外设内写数据)2)开启GPIOx口的时钟外设:(可以一次设置多个用(。
|。
)形式)RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOx,ENABLE);——GPIO配置时都是用APB2,也就说这个语句在GPIO中就是这个样子。
3)选择引脚GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;4)设置GPIO输出模式GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;(1)浮空输入:In_Floating(2)带上拉输入:IPU(In Push_Up)(3)带下拉输入:IPD(In Push_Down)(4)模拟输入:AIN(Anolog In)(5)开漏输出:OUT_PD(OD 代表开漏,既Open Drain,OC代表开集,Open Collect)(6)推挽输出:OUT_PP(PP代表推挽式,Push_Pull)效果例:三个灯轮流亮每刻有且只有一个灯亮(7)复用功能推挽输出:AF_PP(AF代表复用功能,Alternate-Fuction)(8)复用功能开漏输出:AF_OD5)设置引脚速率GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;6)调用库函数初始化GPIO(注:每次只能初始化一个引脚)GPIO_Init(GPIOB, &GPIO_InitStructure); (如果要控制其他引脚,重复上面的3和6有时也会用到4步,总的来说配置一个GPIO至少要有1—6步)另外:GPIO_SetBits(GPIOx, GPIO_Pin_i|GPIO_Pin_j); ——对所有端口进行置1操作(高电平)GPIO_ResetBits(GPIOx,GPIO_Pin_i); ——对所有端口进行置0操作(低电平)GPIO_WriteBits(GPIOx, GPIO_Pin_i,1); ——对一个端口进行写1(也可以写0,把括号内的1改为0即可)操作GPIO_Write(GPIOA, 0x1101);——向指定GPIO数据端口写入数据GPIO库函数:函数名描述GPIO_DeInit 将外设GPIOx寄存器重设为缺省值GPIO_AFIODeInit 将复用功能(重映射事件控制和EXTI设置)重设为缺省值GPIO_Init 根据GPIO_InitStruct中指定的参数初始化外设GPIOx寄存器GPIO_StructInit 把GPIO_InitStruct中的每一个参数按缺省值填入GPIO_ReadInputDataBit 读取指定端口管脚的输入GPIO_ReadInputData(GPIOx,GPIO_Pin_i) 读取指定的GPIO端口输入GPIO_ReadOutputDataBit(GPIOx,GPIO_Pin_i) 读取指定端口管脚的输出位(0|1)GPIO_ReadOutputData(GPIOx,GPIO_Pin_i) 读取指定的GPIO端口输出GPIO_SetBits 设置指定的数据端口位GPIO_ResetBits 清除指定的数据端口位GPIO_WriteBit 设置或者清除指定的数据端口位GPIO_Write 向指定GPIO数据端口写入数据GPIO_PinLockConfig 锁定GPIO管脚设置寄存器GPIO_EventOutputConfig 选择GPIO管脚用作事件输出GPIO_EventOutputCmd 使能或者失能事件输出GPIO_PinRemapConfig 改变指定管脚的映射GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource0); 选择GPIO管脚用作外部中断线路(例子是让PA0引脚作为中断线路),中断触发时该线将中断输出。
gpio详细解读 -回复
gpio详细解读-回复GPIO详细解读GPIO,全称为通用输入输出接口(General Purpose Input/Output),是一种在计算机系统中用于与外部设备进行数字通信的接口。
它允许计算机与各种不同类型的外设进行通信,并且可以通过软件控制这些外设的输入和输出。
在本文中,我将逐步回答关于GPIO的各种问题,以帮助读者全面理解和使用GPIO接口。
一、GPIO概述GPIO是计算机系统与外部设备之间的桥梁,它通过引脚(pin)与外设相连,使用数字信号进行通信。
每个引脚可以配置为输入或输出模式,以实现不同的功能。
GPIO接口的灵活性和通用性使其成为计算机系统的核心部分。
二、GPIO引脚GPIO引脚是与外部设备相连的物理引脚,它们通常以数字方式编号,并且可以通过引脚号来识别和访问。
常见的计算机系统通常具有多个GPIO引脚,可以通过软件将它们配置为输入或输出模式。
三、GPIO模式GPIO引脚可以配置为输入或输出模式,取决于与之相连的外部设备类型和应用需求。
在输入模式下,GPIO引脚可以接收来自外设的信号,并将其传递到计算机系统;而在输出模式下,GPIO引脚可以发送计算机系统生成的信号到外设。
四、GPIO寄存器GPIO寄存器是计算机系统中用于配置和控制GPIO引脚的寄存器。
通过读写这些寄存器的值,可以设置GPIO引脚的工作模式、电平状态和其他参数。
使用GPIO寄存器可以实现对GPIO接口的灵活编程控制。
五、GPIO驱动程序为了简化对GPIO的操作,操作系统通常提供了GPIO驱动程序。
通过调用这些驱动程序提供的接口函数,可以更方便地实现对GPIO引脚的配置和控制。
驱动程序隐藏了底层硬件细节,使开发人员能够更专注于应用程序的开发。
六、GPIO使用示例以下是一个简单的GPIO使用示例,以帮助读者更好地理解GPIO接口的工作原理。
1. 引脚配置:首先,需要选择一个GPIO引脚,并将其配置为输入或输出模式。
这可以通过操作GPIO寄存器来实现。
gpio读写操作
gpio读写操作GPIO(General Purpose Input/Output)是一种通用输入输出接口,广泛应用于各种嵌入式系统,如微控制器、树莓派、Arduino等。
GPIO操作主要用于与外部硬件设备进行交互,包括读取传感器数据、控制执行器等。
本文将介绍GPIO的基本概念、读写操作方法以及应用实例。
一、GPIO基础GPIO通常通过特定的引脚与外部设备进行通信。
这些引脚可以设置为输入模式(从外部设备读取数据)或输出模式(向外部设备发送数据)。
GPIO通常被用来驱动LED灯、蜂鸣器、继电器等简单硬件设备。
此外,GPIO还常常用于控制微控制器或其他硬件的外设。
1. 初始化GPIO在进行GPIO读写操作前,需要先进行初始化。
具体来说,需要配置GPIO引脚的电气特性,如高低电平、上拉/下拉电阻等。
初始化通常在程序启动时进行。
2. 读取GPIO状态读取GPIO状态是指从GPIO引脚读取当前状态,即判断该引脚是高电平还是低电平。
可以通过查询引脚的值或者使用取反操作来获取状态。
3. 设置GPIO值设置GPIO值是指向GPIO引脚写入数据,以控制外部设备的动作。
通常使用输出操作来完成。
需要注意的是,不同的硬件平台可能具有不同的数据类型和寄存器,需要根据具体的硬件平台进行设置。
4. 配置GPIO为输入模式将GPIO配置为输入模式是指将该引脚设置为从外部设备读取数据。
当引脚接收到外部信号时,会自动将其状态存储起来,以便后续读取。
在输入模式下,通常需要配置适当的上拉或下拉电阻以避免悬空。
三、应用实例以下是一个简单的应用实例,演示如何使用树莓派和Python编程语言进行GPIO读写操作:1. 初始化GPIO在Python中,可以使用RPi.GPIO模块来操作树莓派的GPIO引脚。
首先,需要导入该模块并使用setup()函数初始化GPIO。
例如:RPi.GPIO.setmode(RPi.GPIO.BOARD) # 设置模式为板载模式RPi.GPIO.setup(12, RPi.GPIO.OUT) # 将引脚12设置为输出模式2. 读取GPIO状态可以使用input()函数来读取GPIO的状态。
8051单片机“看门狗”原理、详解和C语言演示程序
值得提一下: 由于现在 AT89S52 应用比较广泛,所以我先说说 ATMEL 的看门狗;再说
说本次试验用的 STC89C52RC 的看门狗;注意两个丌一样!!! AT89S52 单片机看门狗定时器是 14 位的,最大计数 214=16384 个数,每计
16384 个时钟周期就溢出一次。也就是说如果使用 12M 晶振的话,至少应该在 16.384ms 内喂一次狗。
~5~
程序代码:
/*************************************************************************** 程序功能:本程序演示 STC51 单片机看门狗程序 程序设计:燕山大学 鲁信琼 晶振选择:11.0592MHz, 如果晶振不匹配,请修改延时函数参数
候一直亮着;用于指示系统是否重启
uchar timer0_ctr,i;
const uchar str[]="I love MCU!"; //定义一句话,让他从串口输出,只有系统重启的时候才输 出一次,所以也是用于********************************************************************/ //延时函数,11.0592MHz 晶振下延时约 xms 毫秒 void delay_ms(unsigned xms) {
//初始化时两盏灯都熄灭 LED=1; LED_busy=1;
TMOD=0x21; 为串行口波特率发生器
TH0=0x4C; TL0=0x00; IE=0x82; TR0=1;
//定时器 0 工作在方式 1,作为 16 位定时器;定时器 1 工作在方式 2,作
//定时器 0 装初值:每隔 50ms 溢出一次
gpio的基本使用方法
gpio的基本使用方法GPIO,即通用输入输出引脚,是一种通用的数字信号输入输出接口,它允许我们将数字信号发送到其他设备,或从其他设备接收数字信号,并使用它们进行控制和通信。
在树莓派等嵌入式设备的开发工作中,GPIO是非常重要的一个组成部分,使用方法也十分简单。
一、初始化GPIO要使用GPIO,我们首先需要将其初始化,以便我们可以开始使用其不同的引脚。
在初始化过程中,我们需要指定GPIO的模式,即输入或输出模式。
1.导入必要的库import RPi.GPIO as GPIO2.设置GPIO引脚模式:“输入/输出”GPIO.setmode(GPIO.BOARD)这将使我们根据引脚的物理编号而不是树莓派GPIO编号来标识GPIO引脚。
3.设置GPIO模式GPIO.setup(pin, mode)其中“pin”为GPIO引脚编号,“mode”可以是“IN”(输入模式)或“OUT”(输出模式)。
例如,要将GPIO引脚7设置为输出模式,代码如下:GPIO.setup(7, GPIO.OUT)二、读写GPIOGPIO只能够处理高低电平,因此我们需要了解如何使用Python将高电平和低电平发送到GPIO引脚,并从GPIO引脚读取高电平和低电平。
1.写GPIOGPIO.output(pin, value)其中,“pin”为GPIO引脚编号,“value”可以是HIGH(高电平)或LOW(低电平)。
例如,要将GPIO引脚7输出高电平,代码如下:GPIO.output(7, GPIO.HIGH)2.读GPIOGPIO.input(pin)其中,“pin”为GPIO引脚编号。
例如,要从GPIO引脚7读取电平,代码如下:input_value = GPIO.input(7)三、关闭GPIO当我们完成了对GPIO引脚的使用之后,需要将其关闭以防止出现不必要的错误并释放它们的状态。
我们可以使用GPIO.cleanup()函数将所有GPIO设置为默认状态。
GPIO用法及应用流程
GPIO用法及应用流程GPIO(General Purpose Input/Output)是一种通用输入/输出接口,用于连接嵌入式系统的外部设备和传感器。
它可以通过编程来控制和读取外部设备的状态,并在嵌入式系统中实现各种应用功能。
下面将详细介绍GPIO的用法及应用流程。
一、GPIO的用法:1.引脚模式设置:GPIO的引脚可以设置为输入模式(用于读取外部设备的状态)或输出模式(用于控制外部设备的状态)。
2.引脚方向设置:输入模式的引脚可以设置为上拉电阻或下拉电阻,以防止悬浮状态产生误判;输出模式的引脚可以设置为高电平或低电平。
3.引脚状态读取与控制:可以通过读取引脚的电平状态来获取外部设备的状态信息;也可以通过控制引脚的电平状态来控制外部设备的行为。
4.中断与事件:可以在引脚电平变化时产生中断或触发事件,以便及时响应引脚的状态变化。
5.管理多个引脚:可以同时管理多个GPIO引脚,实现更复杂的应用功能。
二、GPIO的应用流程:1.引脚初始化:在使用GPIO之前,需要将相关引脚初始化为输入或输出模式,并设置正确的引脚方向、上拉/下拉电阻等属性。
2.读取引脚状态:通过读取引脚的电平状态来获取外部设备的状态信息。
可以使用轮询方式或中断方式进行读取。
3.控制引脚状态:通过控制引脚的电平状态来控制外部设备的行为。
可以将引脚设置为高电平或低电平,或者使用PWM(脉冲宽度调制)方式进行精确控制。
4.处理引脚中断/事件:当引脚发生电平变化时,可以通过中断或事件的方式及时响应引脚的状态变化,进而执行相应的处理任务。
5.循环读取/控制:通常情况下,GPIO的读取和控制操作需要在一个循环中进行,以不断更新外部设备的状态或响应外部变化。
三、GPIO的应用示例:1.LED控制:将GPIO引脚设置为输出模式,通过控制引脚的电平状态来控制LED的亮灭。
2.按钮读取:将GPIO引脚设置为输入模式,读取按钮的电平状态来判断按钮是否被按下。
GPIO的设置与使用
GPIO的设置与使用GPIO,全称为“General Purpose Input/Output”,即通用输入/输出端口。
它是单片机(或其他外设)上的一组可编程的通用引脚,可以配置为输入或输出,通过编程控制,与外界设备进行数据交互。
GPIO具有可编程性和通用性,因此在嵌入式系统中广泛应用于控制和通信。
1.引脚模式设置:GPIO引脚可以配置为不同的模式,例如输入模式、输出模式、复用模式等。
一般通过寄存器来配置引脚的模式。
对于输入模式,可以配置引脚的阻抗、上拉或下拉电阻;对于输出模式,可以配置引脚的电平状态;对于复用模式,可以选择引脚的功能和使用的外设。
2.引脚操作:一旦引脚被配置为输入或输出模式,就可以通过相应的寄存器对引脚进行操作。
对于输入引脚,可以获取引脚的电平状态,判断输入信号的逻辑值;对于输出引脚,可以设置引脚的电平状态,控制输出信号的逻辑值。
3.中断设置:GPIO引脚可以配置中断功能,这样当引脚的电平状态发生变化时,可以触发中断并执行相应的中断服务程序。
通过中断方式,可以实现对输入引脚的实时监测和响应。
4.外设控制:GPIO引脚可以与外设进行连接,并通过GPIO来控制外设的功能。
例如,可以通过GPIO控制LED的亮灭、驱动蜂鸣器的发声、读取按键的状态等。
这需要通过设置相应的引脚模式和操作寄存器来实现。
1.确定所需的GPIO引脚:根据具体需求,确定需要使用的GPIO引脚。
这可以通过查阅芯片手册或开发板资料来获取相应的引脚信息。
2.配置引脚模式:根据使用要求,将GPIO引脚配置为输入或输出模式。
这一般需要设置相应的寄存器,标志位或设置值。
3.进行引脚操作:根据GPIO引脚的模式,进行相应的读取或写入操作。
对于输入引脚,可以读取引脚的电平状态;对于输出引脚,可以设置引脚的电平状态。
4.设置中断:如果需要使用中断功能,可以配置相应的中断使能,并编写中断处理函数。
在引脚状态变化时,触发中断执行中断处理程序。
一文读懂STM32f030c8t6单片机ADC模拟看门狗的使用
一文读懂STM32f030c8t6单片机ADC模拟看门狗的使用
STM32f030c8t6单片机ADC模拟看门狗使用
根据st官方手册提供描述不难看出,ADC模拟看门狗其实就是用户可以设置一个AD值上下限值,然后打开此模拟看门狗中断开关,那么就会在检测到当IO输入转换AD值小于下限值或大于上限值时进入相应的中断函数。
大致就是这么一个功能实现过程。
根据表63可以看出,模拟看门狗可以设置为多通道和单通道模式,即可以通过设置相应的寄存器位来选择某一通道或多通道打开模拟看门狗检测。
那么明白了以上这些基础规则,那么我就要根据官方提供的库文件及里面的使用说明来配置相应函数来使用模拟看门狗。
打开此文件后下一步:
看!在这个官方提供的.c文件里面已经有介绍关于模拟看门狗使用的详细介绍的,只要理解了英文描述的意义,结合之前看数据手册关于ADC模拟看门狗的描述就会很快的完成模拟看门狗的配置程序。
下面即是完成的模拟看门狗配置函数:
最后还不要忘记加入打开看门狗中断的函数:
ADC_ITConfig(ADC1,ADC_IT_AWD,ENABLE);
完整的配置过程如下:
voidNVIC_Config(void)
{
NVIC_InitTypeDefNVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannelPriority=3;//先占优先级1级。
[精品]看门狗说明
看门狗说明1、看门狗原理主板上提供一个可按分或秒计时的,最长达255级的可编程看门狗定时器,WDT超时事件发生时系统复位。
本程序(w83627hf_wdt.c)是基于Winbond83627芯片的看门狗驱动程序。
2、驱动程序接口●wdt_open :打开设备,应用程序调用open时进入该函数。
●wdt_close :关闭设备,应用程序调用close时进入该函数●wdt_write :写设备,若传入数据大小不为0则喂狗;应用程序调用write时进入该函数。
●wdt_ioctl :应用程序调用ioctl时进入该函数,通过传入不同的参数实现不同的功能。
主要参数如下:WDIOC_GETSUPPORT :获取看门狗信息watchdog_info(见w83627hf_wdt.h) WDIOC_KEEPALIVE :喂狗,同write函数功能类似WDIOC_SETTIMEOUT :设置超时值WDIOC_GETTIMEOUT :获取超时值WDIOC_SETOPTIONS :设置看门狗状态,开启(WDIOS_ENABLECARD)或关闭(WDIOS_DISABLECARD)3、应用程序编写主要步骤如下(请参考代码w83627hf_test.c):●打开设备调用open方法,返回值为已打开的设备,若小于0表示打开失败,以下的调用都要用该返回值做参数,表示操作该设备。
wdt = open(WDT_DEVICE, O_RDWR);●开启看门狗调用ioctl方法,传入WDIOC_SETOPTIONS参数,设置开启(WDIOS_ENABLECARD)状态,方法如下:ioctl(wdt, WDIOC_SETOPTIONS, WDIOS_ENABLECARD);●设置看门狗超时值(可选,默认为60s)调用ioctl方法,传入WDIOC_SETTIMEOUT参数,设置指定的超时值。
ioctl(wdt, WDIOC_SETTIMEOUT, &timeout);//timeout为超时值●喂狗一般用while(1)循环在超时时间(timeout)内定时喂狗,若在timeout内没喂狗,则系统复位。
CC2530单片机技术与应用 第2版 第7章CC2530看门狗应用
MODE:该位用于启动WDT处于看门狗模式还是定时器模式。当处于定时器模式,设置这些位为IDLE将停 止定时器。注意:当运行在定时器模式时要转换到看门狗模式,首先停止WDT,然后启动WDT处于看 门狗模式。当运行在看门狗模式,写这些位没有影响。
INT:注意间隔只能在WDT处于IDLE时改变,这样间隔必须在定时器启动的同时设置。
描述
7:4 CLR[3:0] 0000 R0/W 清除定时器。当0xA跟随0x5写到这些位,定时器被清除(即加载0)。
模式选择。
3:2
MODE[1: 0]
00
1:0 INT[1:0] 00
00:IDLE(idle空闲的意思)
R/W
01:IDLE(未使用,等于00设置)
10:看门狗模式
11: 定时器模式
定时器间隔选择。这些位选择定时器间隔定义为32 kHz振荡器周期的规
定数。00: 定时周期×32,768 (~1 s)当运行在32 kHz XOSC
R/W
01: 定时周期×8192 (~0.25 s)
10: 定时周期×512 (~15.625 ms)
11: 定时周期×64 (~1.9 ms)
CLR:注意定时器仅写入0xA后,在1个看门狗时钟周期内写入0x5时被清除。当看门狗定时器是IDLE为时写 这些位没有影响。当运行在定时器模式,定时器可以通过写1到CLR[0](不管其他3位)被清除为 0x0000(但是不停止)
3、开发实验
开始实验。。。。。。
3、开发实验
3、开发实验
开始实验。。。。。。
4、拓展题
题1:
实验要求:我们在主函数中把喂狗函数FeedWD注释掉,请把该函 数加入系统,然后重新编译下载至实验板运行,观察现象。LED1还 闪烁吗?为什么?
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPIO和看门狗使用例子说明
1. 概述:
验证和使用,GPIO和看门狗API例子程序。
SOM2386/2388, 4(GPIO)+3(GPIO或中断线可选)路双向可编程数字I/O。
l 4位双向口(PIO0,PIO1,PIO10,PIO11)
l 3位可选双向口(IRQ2/PIO12, IRQ3/PIO13, IRQ6/PIO31)
PCM3386/3388 ,提供4(GPIO) 和14路(5V电平)单向数字I/O通道。
l 4位双向口(PIO0,PIO1,PIO10,PIO11)
l 8位单向输入I/O,(GP10,GP11,GP12,GP13,GP14,GP15,GP16,GP17)
IO地址=0x200H
l 8位单向输出I/O (GP20,GP21,GP22,GP23,GP24,GP25)
IO地址=0x208H(bit5 ̄bit0)
2. 环境:
l 虚拟显示环境(参见搭建虚拟显示环境相关文档)
3. 演示方法和效果:
l PC下载方式
l 使用BC45,打开C:\lanry\example\gpio\GPIODEMO.IDE工程。
l 编译下载到目标板上(参见演示录象)。
l 单步,验证相应的代码。
4. API函数说明
#define PIO0 0 /*4位gpio*/
#define PIO1 1 /*4位gpio*/
#define PIO10 10 /*4位gpio*/
#define PIO11 11 /*4位gpio*/
#define PIO12 12 /*3位中断或gpio可选*/
#define PIO13 13 /*3位中断或gpio可选*/
#define PIO31 31 /*3位中断或gpio可选*/
char PIORead(int PIO_BIT_INDEX ) ;
功能: 片上通用IO读函数: PIORead
入口参数:int PIO_BIT_INDEX cpu 上双向IO索引号
返回值: char =0,表示输入为低电平,=1表示输入高电平,=3,表示失败,方向设置有错
注意: 函数功能,只有在相应的位方向设置为输入时,才是有效的
som2386/2388 中PIO_BIT_INDEX,可选值集(PIO0 , PIO1, PIO10, PIO11,
PIO12, PIO13, PIO31)。
PCM3386/3388中PIO_BIT_INDEX,可选值集(PIO0 , PIO1, PIO10, PIO11 )。
char PIOWrite(int PIO_BIT_INDEX, char Val ) ;
功能: 片上通用IO写函数: PIOWrite
入口参数:int PIO_BIT_INDEX cpu 上双向IO索引号
char Val=0,表示输出低电平,非零表示输出高电平
返回值: char =0,表示成功,非零表示失败,方向设置有错
注意: 函数功能,只有在相应的位方向设置为输出时,才是有效的
som2386/2388 中PIO_BIT_INDEX,可选值集(PIO0 , PIO1, PIO10, PIO11,
PIO12, PIO13, PIO31)。
PCM3386/3388中PIO_BIT_INDEX,可选值集(PIO0 , PIO1, PIO10, PIO11 )。
char PIODirCfg(int PIO_BIT_INDEX, char Dir ) ;
功能: 片上通用IO方向配制函数: PIODirCfg
入口参数:int PIO_BIT_INDEX cpu 上双向IO索引号
char Dir =0,表示输入,=1表示输出,=2表示正常功能
返回值: char =0,表示成功,非零表示失败
注意: 函数功能是改变GPIO方向
som2386/2388 中PIO_BIT_INDEX,可选值集(PIO0 , PIO1, PIO10, PIO11,
PIO12, PIO13, PIO31)。
PCM3386/3388中PIO_BIT_INDEX,可选值集(PIO0 , PIO1, PIO10, PIO11 )。
在som2386/2388中,对于PIO12, PIO13, PIO31中断与GPIO复用引脚,如需恢
复正常功能。
Dir =2,PIO_BIT_INDEX取相应的引脚索引。
unsigned char EXTGP1Read(void) ;
功能: 单向IO读函数: EXTGPIORead
扩展IO输入,对应信号线GP17,GP16,GP15,GP14,GP13,GP12,GP11,GP10
入口参数:
返回值: char 相应数据位等于0,表示输入为低电平,=1表示输入高电平
注意: 在PCM3386/3388中存在
void EXTGP2WRITE(unsigned char Val);
功能:单向IO写函数: EXTGP2WRITE
扩展IO输出,对应信号线GP25,GP24,GP23,GP22,GP21,GP20的数据位BIT5.....BIT0
入口参数:
返回值: VOID
注意: 在PCM3386/3388中存在
void EnableWDT(void);
功能:使能看门狗: EnableWDT
入口参数:
返回值: VOID
void DisableWDT(void);
功能:禁止看门狗: DisableWDT
入口参数:
返回值: VOID
void FeedWDT(void );
功能:喂狗: FeedWDT
入口参数:
返回值: VOID
void SetWDT(char Idan);
功能:设看门狗的时间间隔:SetWDT
入口参数:Idan ;Idan设时间间隔,
参数: 0 1 2 3 4 5 6 7 cpu主频:
50 MHz 41 us 42 ms 83.8 ms 167.8 ms 335.5 ms 671 ms 1.34 s 2.68 s 75 MHz 27.3 us 28 ms 55.9 ms 111.8 ms 223.7 ms 447.4 ms 894.8 ms 1.79 s 100 MHz 20.5 us 21 ms 41.9 ms 83.9 ms 167.8 ms 335.5 ms 671ms 1.34 s 返回值:VOID
void ColdResetSystem(void);
功能:冷启动系统:
入口参数:
返回值: VOID
5. 代码分析:。