中文AB伺服报警代码表
贝加莱伺服故障代码明细表

伺服驱动器故障明细表:1.参数ID无效.2.参数不可读[变量不能在该时刻读取]3.对只读参数写访问4.对只读参数读访问5.参数数值无效,变量格式.6.参数数值无效,变量格式.7.参数数值无效,变量格式.8.数据块读访问已经初始化9.数据块写访问已经初始化10.数据块读访问未初始化11.数据块写访问未初始化,12数据块读访问仍激活.13数据块写访问仍激活.14读响应超时.15写响应超时.16数据块数据段在读已经在最后.17数据块数据段在写已经在最后18数据块数据段未在最后.19数据段未在写数据块的最后.20数据块读后检验和无效.21数据块写后检验和无效.22参数ID在数据块中无效.[读数据块]23参数ID在数据块中无效[写数据块]24在启动状态不允许下载系统模块.25只在下载后立即烧结系统模块.26在启动状态不允许改变启动状态请求.27启动操作不可能[操作系统不在FPROM存储器中] 28在此驱动状态不允许写参数.29在此驱动状态不允许写参数.30因为硬件故障不能读参数.31因为硬件故障不能写参数.32命令参数无效.40参数数值大于最大值.41参数数值大于最大值.42参数数值大于最大值.43参数1数值大于最大值.44参数1数值大于最大值.45参数1数值大于最大值.46参数2数值大于最大值.47参数2数值大于最大值.48参数2数值大于最大值.49参数3数值大于最大值.50参数3数值大于最大值.51参数3数值大于最大值.52参数数值小于最小值.53参数数值小于最小值.54参数数值小于最小值.55参数1数值小于最小值.56参数1数值小于最小值.57参数1数值小于最小值.58参数2数值小于最小值59参数2数值小于最小值.60参数2数值小于最小值.61参数3数值小于最小值.62参数3数值小于最小值.63参数3数值小于最小值.64硬件ID在BAR模块中无效.65硬件版本在BAR模块中无效.66硬件ID的操作系统不兼容现在的总线网络. 1001数值先进先出溢出.1002参数超出有效范围.1003在回路控制激活时不允许写参数.1004激活信号控制网络超时.1005在动作激活时不允许写参数.1006用于触发事件[数字量输入+边沿]1007主站用于网络耦合未激活-编码器错误. 1009内存分配错误.1010先进先出功能溢出.1011快停输入激活.1012循环网络通讯切断.1013用于网络通讯的站点不可行.1014AC112命令接口占用.2001上载跟踪曲线数据不允许,记录激活. 2002无跟踪曲线数据可上载.2003跟踪曲线启动不允许:记录激活.2004跟踪曲线启动不允许:未定义跟踪数据. 2005无效的参数ID用于跟踪测试数据.2006初试跟踪参数不允许:记录激活.4002在仿真命令无效的动作代码.4004在控制器命令无效动作的代码4005使能控制器无效,驱动器错误.4007跟随误差超限停止.4008正限位开关到达.4009负限位开关到达.4010使能控制器无效,两限位关闭4011关闭控制器无效:运动激活.4012使能控制器无效:初始参数丢失或无效. 4014双编码器控制:位置偏差超限停止.5001目标位置大于正向软限位.5002目标位置小于负向软限位.5003正向软限位到达.5004负向软限位到达.5005运动启动可能:位置控制器未激活.5006运动启动不可能:轴未寻参考位置.5010正向位置运动不可能:正向限位开关关闭.5011负向位置运动不可能:负向位开关关闭.5012运动启动不可能:停止激活.5013打开循环设值模式不可能:运动激活.5014关闭循环设值模式不可能.5015运动启动不可能:正在寻参.5016写参数不允许:正在寻参.5017寻参步骤模式不可能:位置控制器未激活.5018寻参步骤模式不可能:运动激活.5019寻参参数超出有效值.5020寻参步骤不可能;两个限位开关关闭.5021限位开关关闭;无方向改变用于寻参.5022第二个限位开关信号收到:参考开关信号未发现. 5023对于当前运动方向收到不正确的限位开关信号. 5024循环设置数据模式放弃:设定位置丢失.5025设置参考点位置偏差用于修正计数范围不可能. 5026基本运动参数超过速度限制.5027基本运动参数超过加速度限制.5028当前运动不是基本运动,5029触发忽略-保持位置超过软限位.5030寻参步骤模式不可能:位置控制器激活,5031寻参步骤模式不可能:循环设值班模式关闭. 5101凸轮曲线补偿:超出界限值.5102过多的变化在每个凸轮曲线(主周期过短)5103从触发先进先出满.5104从触发先进先出空.5105主触发先进先出满.5106主触发先进先出空5107启动凸轮曲线连接不可能:参数超出有效值5108主补偿触发先进现出满.5109主补偿触发先进现出空.5110凸轮曲线连接放弃:循环设定位置丢失.5111凸轮曲线连接放弃:编码器错误.5112命令不允许:凸轮曲线连接未激活.5113命令不允许:控制器絍仍激活.5114写参数不允许:凸轮连接激活.5115重启命令不可能:凸轮时序以前从未激活.5201写参数不允许:鼓序列激活.5202鼓序列发生器:位置不在上升顺序.5300数据块上载无效.5302写参数不允许:凸轮时序激活.5303凸轮曲线未提供索引.5304格式错误在凸轮曲线数据.5306补偿:入口速度超限.5307补偿:连接速度超限.5308补偿:最大爬坡超出.5311凸轮时序:事件指向未初始化状态.5312仅事件类型NCTRIGGER1/2能进入NCLATCHPOS补偿. 5315下载错误:凸轮曲线数据被凸轮时序使用.5316事件类型NCST-END+ncNEGATIVE不能进入补偿.5317启动凸轮时序指向未初始状态.5318主轴相对位置高于凸轮曲线周期.5319凸轮曲线数据不能用于状态.6000主站采样时间不是位置控制器采样时间整数倍.6001同步控制器:同步报文超时.6002同步控制器:系统时间偏差超出.6003控制器在位置模式仍激活.6004控制器在速度模式仍激活.6005控制器在力矩模式仍激活.6006控制器在定子电压旋转磁场模式仍激活.6007控制器在定子电流旋转磁场模式仍激活.6008控制器仍激活.6009参数写保护对现有电机模式.6010参数写保护对现有编码器模式.6011控制器不在速度模式.6012CAN控制器:没有CAN对象空闲.6013双编码器控制器激活.6014驱动器初始化激活,6015CAN控制器CAN总线接收干扰,6016CAN控制器,CAN总线接收干扰6017软件:看门狗激活.6018硬件:15电源失败.6019硬件:IGBT功率放大器过流.6020硬件:24V电源.6021启动锁出激活.6022电流控制器:允许电流偏差6023硬件:累积错误激活。
伺服报警说明

伺服、主轴驱动器检测作业指导书1.伺服驱动器的性能检测2.1 按照伺服驱动器上的端子标示将两相220V、三相220V、地线及电机动力线对应接好。
上电前一定要检查接线正确。
2.2 给伺服驱动器供电,伺服驱动器的显示板要显示正常,不能出现无显、少笔、部分显示暗。
按键功能要正常,不允许出现按键无效、按键卡死等不合格产品。
2.3 设置参数。
根据产品型号的不同,参数的设置也有所不同。
具体参数的设置如下表:型号参数设置160 160-020 PA--0设为2000,PA--2设为12560,PA--4设为4,PA--32设为5160-03016B 16B-020 PA--0设为2000,PA--2设为12560,PA--4设为4,PA--32设为516B-03016L 16L-050 PA--0设为2000,PA--2设为6560,PA--4设为4,PA--32设为516L-07518D 18D-025 PA--2设为4000,PA--3设为40 18D-050 PA--2设为1000,PA--4设为4 18D-075 PA--2设为1000,PA--4设为4 18D-100 PA--5设为1000018D-150 PA--5设为1000018D-200 PA--5设为1000018S18S-025 使用初始值18S-050 使用初始值18S-075 PA--33设为4500,PA--34设为45018S-100 PA--33设为6000,PA--34设为1500,PA--35设为150018S-150 PA--33设为6000,PA--34设为3800,PA--35设为1350参数设置完毕后,选择世纪星程序运行。
如无法正常运行,看伺服驱动是否使能并准备好。
如无使能,则不合格。
运行过程中伺服驱动器可能会报警,报警代码从A1到A16,详情见下表:160、16B、16L系列伺服驱动器报警详情一览表报警代码报警名称处理方法1 主电路欠压接通主电源时①检查供电电源②换伺服驱动器电机运行过程中①检查负载情况②换伺服驱动器2 主电路过压接通控制电源时换伺服驱动器接通主电源时检查供电电源电机运行过程中①换伺服驱动器②检查外部制动电路3 IPM模块故障接通控制电源时换伺服驱动器电机运行过程中①换伺服驱动器②检查检查U、V、W之间接线是否短路4 制动故障接通控制电源时换伺服驱动器电机运行过程中①检查主电源②换伺服驱动器5 保险丝熔断电机运行过程中①检查U、V、W之间接线是否短路②换伺服驱动器6 电机过热接通控制电源时①检查伺服驱动参数STA-12是否为1,不是则改为1保存,断电后重新上电②更换伺服驱动器电机运行过程中①检查机械部分②更换伺服驱动器7 编码器A、B、Z故障①检查编码器接线②换伺服驱动器③更换电机8 编码器U、V、W故障①检查编码器接线②换伺服驱动器③更换电机9 控制电源欠压①检查控制电源②换伺服驱动器10 过电流①检查U、V、W之间接线是否短路②换伺服驱动器③检查伺服电机11 系统超速接通控制电源时①换伺服驱动器②更换伺服电机电机刚启动时①更换伺服电机电机运行过程中①换伺服驱动器②更换伺服电机③换编码器电缆12 跟踪误差过大接通控制电源时换伺服驱动器电机刚启动时①检查U、V、W接线是否正确②换伺服驱动器③更换伺服电机电机运行过程中①换伺服驱动器②更换伺服电机13 软件过热换伺服驱动器14 控制参数读错误①检查控制电源电压②换伺服驱动器15 DSP故障①检查控制电源电压②换伺服驱动器16 看门狗故障①检查控制电源电压②换伺服驱动器18D系列伺服驱动器报警信息一览表报警号报警信息处理方法A-1 主电源电压低于300V ①检查主电源电压②更换伺服驱动器A-2 主电源电压高于780V ①检查主电源电压②更换伺服驱动器A-3 逆变器功率器件故障更换伺服驱动器A-4 制动电路故障更换伺服驱动器A-5 主电源输入缺相①检查主电源相数②更换伺服驱动器A-6 伺服电机过热①检查参数STA-12(为1是正确的)②更换伺服驱动器A-7 编码器A、B、Z故障①检查编码器电缆②更换伺服驱动器③更换电机A-8 编码器U、V、W故障①检查编码器电缆②更换伺服驱动器③更换电机A-9 控制电源欠压①检查控制电源电压②更换伺服驱动器A-10 逆变器过流故障②更换伺服驱动器A-11 电机超速①更换伺服驱动器②更换电机A-12 跟踪误差过大①检查码盘线、指令线是否松动②检查伺服参数(23控制方式,24极对数)③更换伺服驱动器④更换伺服电机A-13 系统过载①更换伺服驱动器②检查码盘线、指令线是否松动A-14 系统参数错误①检查伺服参数②更换伺服驱动器A-15 控制板电路故障更换伺服驱动器A-16 DSP故障更换伺服驱动器A-17 驱动器过热更换伺服驱动器18S系列主轴驱动器报警信息一览表报警号报警信息处理方法A-1 主电源电压低于300V ①检查主电源电压②更换主轴驱动器A-2 主电源电压高于780V ①检查主电源电压②更换主轴驱动器A-3 逆变器功率器件故障更换主轴驱动器A-4 制动电路故障更换主轴驱动器A-5 主电源输入缺相①检查主电源相数②更换主轴驱动器A-6 主轴电机过热①检查参数STA-12(为1是正确的)②更换伺服驱动器A-7 编码器A、B、Z故障①检查编码器电缆②更换主轴驱动器③更换电机A-8 编码器U、V、W故障①检查编码器电缆②更换主轴驱动器③更换电机A-10 过电流故障①更换主轴驱动器A-11 电机超速①更换主轴驱动器②更换电机A-12 跟踪误差过大①检查码盘线、指令线是否松动②检查驱动器参数(23控制方式,24极对数)③更换主轴驱动器④更换伺服电机A-13 系统过载①更换主轴驱动器②检查码盘线、指令线是否松动A-14 系统参数错误①检查伺服参数②更换主轴驱动器A-15 控制板电路故障更换主轴驱动器A-16 DSP故障更换主轴驱动器A-17 驱动器过热更换主轴驱动器3.检测完成后操作伺服驱动能正常运行完程序,并且没有出现以上的报警现象、显示正常、风扇能正常运行的驱动器则是合格品。
伺服变频器故障代码
伺服变频器故障代码
伺服变频器是一种常见的工业设备,用于控制电动机的转速和运行。
在实际应
用中,由于各种原因可能会出现各种故障。
下面将介绍一些常见的伺服变频器故障代码以及对应的解决方法。
故障代码E001
故障代码E001通常表示电源输入异常。
这可能是由于电源线路故障、电源波
动等原因引起的。
解决方法包括检查电源线路连接是否正常、检查电源波动情况等。
故障代码E002
故障代码E002表示过载保护。
这可能是由于负载过重、电机故障等原因引起的。
解决方法包括降低负载、检查电机状态等。
故障代码E003
故障代码E003表示过热保护。
这可能是由于散热不良、环境温度过高等原因
引起的。
解决方法包括增加散热措施、降低环境温度等。
故障代码E004
故障代码E004表示通讯故障。
这可能是由于通讯线路故障、通讯参数设置不
正确等原因引起的。
解决方法包括检查通讯线路连接、重新设置通讯参数等。
故障代码E005
故障代码E005表示过压保护。
这可能是由于输入电压过高等原因引起的。
解
决方法包括检查供电电压是否正常、增加过压保护措施等。
以上是一些常见的伺服变频器故障代码以及相应的解决方法,希望能帮助到大
家更好地维护和管理伺服变频器设备。
在实际使用过程中,遇到不同的故障代码需要根据具体情况进行排查和处理,及时解决问题,确保设备正常运行。
伺服电控报错代码
有故障代码Fault Code无故障代码No Fault Code无剪线No shearing-line.踩下脚踏板电机无任何反应No respond in motor when tread the pedals.电机转动时有异响There is abnormal sound when the motor works.脚踏板无高速Motor don’t accelerate when tread the pedals.显示屏无显示There is no display on the display.操作面板按键无反应No respond on buttons of the operation panel.开机无电无显示No power and no display when power on.开机机器自跑Motor works automatically when power on.没有自动倒缝NO automatic backstitch.“P”+“✄”进入检测模式,调整为P01,查看其数值是否在“250~380V”范围内Please press “P”+“✄”to enter the testing mode, switch to P01,then check whether the value is in the range of “250~380V”.请在关机状态下拔掉电机与伺服器的连接线,转动电机手轮,查看电机轮是否过重Please pull out the connecting line between motor and servo in the off state, then rotate the motor’s hand wheel to see whether the motor’s hand wheel is too heavy.您的电机已短路,请立即更换There are short circuits in your motor, please replace it immediately.您的电网不稳定造成伺服器无法正常工作。
安川伺服驱动器的常用故障代码

安川伺服驱动器的常用故障代码关键信息项:1、故障代码列表2、故障代码含义3、可能的故障原因4、故障诊断方法5、故障解决措施1、故障代码列表11 A00 过电流111 A02 过电压112 A03 低电压113 A04 过载114 A05 再生过载115 A10 过热116 A30 再生异常117 A40 主电路检测异常118 A51 超速119 A71 过载高120 A72 过载低121 A73 动态制动过载122 A74 紧急停止123 A81 编码器备份警报124 A82 编码器和数校验警报125 A83 编码器电池警报126 A84 编码器数据警报127 A85 编码器过速警报128 A90 编码器故障129 A91 位置偏差过大130 A92 电机过载2、故障代码含义21 A00 过电流:表示驱动器输出电流超过了允许的最大值。
22 A02 过电压:驱动器的直流母线电压超过了规定的上限值。
23 A03 低电压:直流母线电压低于规定的下限值。
24 A04 过载:电机的负载超过了驱动器的额定负载能力。
25 A05 再生过载:再生能量超过了驱动器的处理能力。
26 A10 过热:驱动器内部温度过高。
27 A30 再生异常:再生电路工作不正常。
28 A40 主电路检测异常:主电路的检测环节出现故障。
29 A51 超速:电机转速超过了设定的最高速度。
210 A71 过载高:负载超过了驱动器的高过载设定值。
211 A72 过载低:负载超过了驱动器的低过载设定值。
212 A73 动态制动过载:动态制动过程中出现过载。
213 A74 紧急停止:系统触发了紧急停止信号。
214 A81 编码器备份警报:编码器的备份数据出现问题。
215 A82 编码器和数校验警报:编码器的数据校验错误。
216 A83 编码器电池警报:编码器的电池电量低或故障。
217 A84 编码器数据警报:编码器的数据传输或处理出现异常。
218 A85 编码器过速警报:编码器的转速超过了允许范围。
科尔摩根伺服报警代码中文

科尔摩根伺服报警代码中文科尔摩根伺服报警代码(中文)————————————————————————————————作者: ————————————————————————————————日期:错误编号名称说明E /P 状态信息通电状态正常... 状态信息放大器是更新启动配置- 状态信息编程模式- S -AS-Enable AS-Enable输入0VF01* 散热片温度散热片温度过高(默认:80°C)F02* 超压供电过压F03* 跟踪误差位置控制器F04 信息反馈线缆坏、短路、接地F05* 欠压供电低压F06 电机温度电机温度过高,或传感器故障F07 内部电压内部供应电压不行F08* 超速度电机速度过高,位置偏移F09 电可擦只读存储器自检错误F10 信号失灵保护信号失灵保护(线缆坏或接触不良)F11 制动器线缆坏、短路、接地F12电机相位电机位置丢失(线缆坏等)F13* 环境温度环境温度过高F14 输出级输出功率错误F15 I2t max.I2t超过最大值F16* 电源BTB/RTO 2或3个阶段没有供电F17 A / D转换器模数转换误差,造成极端的电磁干扰F18重新生成回复电路故障或不正确的设置F19* 直流母线连接直流母线连接故障F20 槽误差槽误差,取决于类型的扩充卡(见ASCII命令参考) F21 操纵错误处理扩充卡错误F22 保留的保留的F23 总线通讯关闭严重的CAN总线通信的错误F24警告显示警告故障F25 变换误差换码误差F26 限位开关硬件限制开关移动误差F27AS操作错误——AS-Enable输入,使已经确定在同一时间F28 现场总线错误现场总线错误(见ASCII命令参考)F29 现场总线错误现场总线通信干扰(见ASCII命令参考)F30 紧急暂停暂停,紧急停车F31 保留保留F32系统错误系统软件没有反应正确警告信息编号名称说明E/P状态信息通电状态正常. . . 状态信息放大器是更新启动配置- S-AS-Enable AS-Enable输入0V- 状态信息编程模式n01 I2t I2t临界值超过n02 回复电压达到预设电压n03* S_故障超过预置下的错误限制n04*响应监测响应监测(现场总线)已经启动n05 供应阶段供电相丢失n06* SW限制开关1通过软件限制开关1n07* SW限制开关2通过软件限制开关2n08 运动任务误差a faulty motiontask was startedn09 没有参考点no reference point(Home) set at start of motion taskn10* PSTOP PSTOP限位开关激活n11* NSTOP NSTOP限位开关激活n12 电机加载默认值只有ENDAT或HIPERFACE,差异电机数字保存在该编码器和放大器、电机负载默认值n13* 扩展卡24 V直流供电为I/O扩充卡不可以n14 SinCos反馈SinCos换向器(激发和运动)没有完成,将被取消当放大器被激活和激发和运震动进行了n15 保留保留n16 总结警告总结了n31到n17警告n17 现场总线的同步CAN同步没有登录n18 multiturn overflow max.超过电的机转数量n19 motion task rampsare limited在运动范围溢出任务数据n20 无效运动任务无效运动任务n21 PLC程序错误详情见可编程序控制器(PLC)的代码n22 max. motor temperaturreachedthe user can shut down theprocessbe fore thetemperatureeror will interrupt the proces simmediatel yn23SinCos反馈到达警告等级n24 数字I /O配置不合乎逻辑n25-n31保留保留n32 固件版本固件版本是一个n故障错误诠释显示意义可能原因措施/解释HMI(人机界面)消息:通信故障电缆使用错误使用null-modem电缆伺服放大器或PC上电缆插错位置正确的插伺服放大器和PC电缆插头错误的PC接口选择选择正确的界面F01* 散热片温度散热片温度过高调整系统设置温度(80)或降低环境温度放大器过脏检查/吹出通风槽。
安川伺服驱动器的常用故障代码图文稿
安川伺服驱动器的常用故障代码Company number【1089WT-1898YT-1W8CB-9UUT-92108】安川伺服驱动器的常用故障代码A.00绝对值数据错绝对值错误或没收到A.02参数中断用户参数检测不到A.04参数设置错误用户参数设置超出允许值A.10过流电源变压器过流A.30再生电路检查错误再生电路检查错误A.31位置错误脉冲溢出位置错误,脉冲超出参数Cn-1E设定值A.40主电路电压错误主电路电压出错A.51过速电机转速过快A.71过载(大负载)电机几秒至几十秒过载运行A.72过载(小负载)电机过载下连续运行A.80绝对值编码器差错绝对值编码器每转脉冲数出错ssszxxfA.81绝对值编码器失效绝对值编码器电源不正常A.82绝对值编码器检测错误绝对值编码器检测不正常A.83绝对值编码器电池错误绝对值编码器电池电压不正常A.84绝对值编码器数据不对绝对值编码器数据接受不正常A.85绝对值编码器转速过高电机转速超过400转/分后编码器打开A.A1过热驱动器过热A.B1给定输入错误伺服驱动器CPU检测给定信号错误A.C1伺服过运行伺服电机(编码器)失控A.C2编码器输出相位错误编码器输出A、B、C相位出错A.C3编码器A相B相断路编码器A相B相没接A.C4编码器C相断路编码器C相没接A.F1电源缺相主电源一相没接A.F3电源失电电源被切断CPF00手持传输错误1通电5秒后,手持与连接仍不对CPF01手持传输错误2传输发生5次以上错误A.99无错误操作状态不正常安川伺服报警代码报警代码报警名称主要内容A.00绝对值数据错误不能接受绝对值数据或接受的绝对值数据异常A.02参数破坏用户常数的“和数校验”结果异常A.04用户常数设定错误设定的“用户常数”超过设定范围A.10电流过大功率晶体管电流过大A.30测出再生异常再生处理回路异常A.31位置偏差脉冲溢出位置偏差脉冲超出了用户常数“溢出(Cn-1E)”的值A.40测出主回路电压异常主回路异常A.51速度过大电机的回转速度超出检测电平A.71超高负荷大幅度超过额定转矩运转数秒-数十秒A.72超低负荷超过额定转矩连续运转A.80绝对值编码器错误绝对值编码器一转的脉冲数异常A.81绝对值编码器备份错误绝对值编码器的三个电源(+5v,电池组内部电容器)都没电了A.82绝对值编码器和数校验错误绝对值编码器内存的“和数校验”结果异常A.83绝对值编码器电池组错误绝对值编码器的电池组电压异常A.84绝对值编码器数据错误收受的绝对值数据异常A.85绝对值编码器超速绝对值编码器通电源时,转速达400r/min以上A.A1散热片过热伺服单元的散热器过热A.b1指令输入阅读错误伺服单元的CPU不能检测指令输入A.C1伺服失控伺服电机(编码器)失控A.C2测出编码器相位差编码器的A,B,C三相输出的相位异常A.C3编码器A相,B相断线编码器的A相,B 相断线A.C4编码器C相断线编码器C相断线A.F1电源线缺相主电源有一相没连接A.F3瞬时停电错误在交流电中,有超过一个电源周期的停电发生CPF00数字操作器通讯错误-1通电5秒后,还不能和伺服单元通讯CPF01数字操作器通讯错误-2连续发生5次数据通讯不好A.99无错误显示显示正常动作状态A.C9编码器通讯故障(此故障一般都是编码器断线造成的,故障代码只有接好线后才会自动消失)A32回生过载,回生电能超过回生电阻容量。
AB故障代码
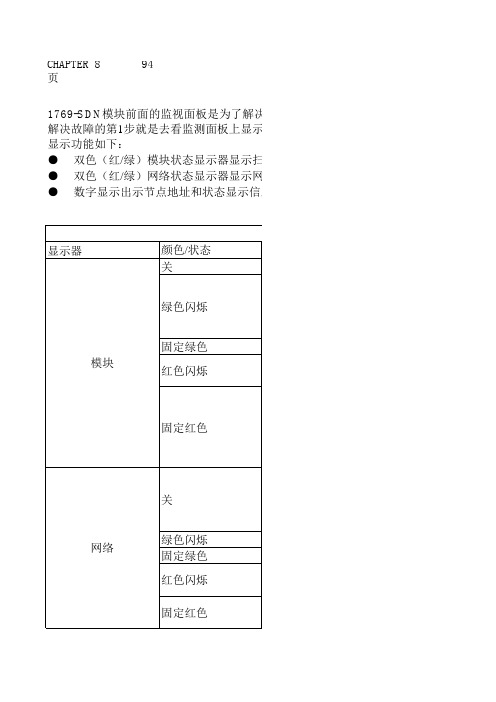
CHAPTER 8 94页
故障代码1769-SDN模块前面的监视面板是为了解决故障时方便而设的。
解决故障的第1步就是去看监测面板上显示的7段数字报警信息。
显示功能如下:
●双色(红/绿)网络状态显示器显示网络路线通讯连接的信息。
●数字显示出示节点地址和状态显示信息。
状态信息在节点地址之前。
●双色(红/绿)模块状态显示器显示扫描模块是否有电源或正在运行。
AB故障代码
是为了解决故障时方便而设的。
板上显示的7段数字报警信息。
器显示扫描模块是否有电源或正在运行。
器显示网络路线通讯连接的信息。
态显示信息。
状态信息在节点地址之前。
.。