杠杆原理在人体中的应用 ppt课件
人体骨杠杆的分类及其在康复过程
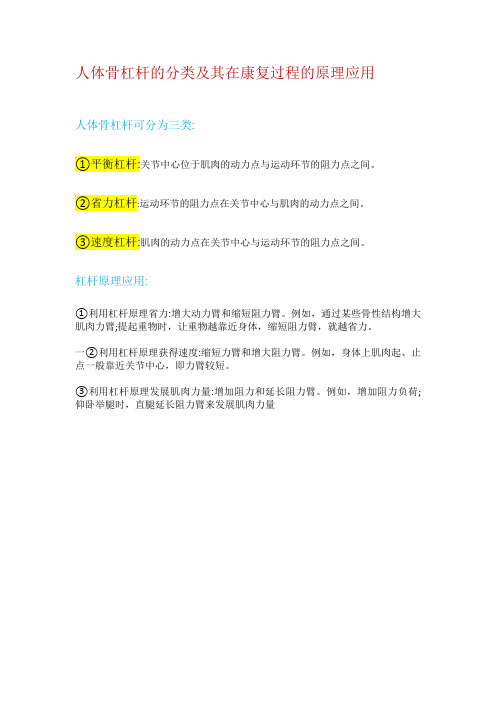
人体骨杠杆的分类及其在康复过程的原理应用
人体骨杠杆可分为三类:
①平衡杠杆:关节中心位于肌肉的动力点与运动环节的阻力点之间。
②省力杠杆:运动环节的阻力点在关节中心与肌肉的动力点之间。
③速度杠杆:肌肉的动力点在关节中心与运动环节的阻力点之间。
杠杆原理应用:
①利用杠杆原理省力:增大动力臂和缩短阻力臂。
例如,通过某些骨性结构增大肌肉力臂;提起重物时,让重物越靠近身体,缩短阻力臂,就越省力。
一②利用杠杆原理获得速度:缩短力臂和增大阻力臂。
例如,身体上肌肉起、止点一般靠近关节中心,即力臂较短。
③利用杠杆原理发展肌肉力量:增加阻力和延长阻力臂。
例如,增加阻力负荷;仰卧举腿时,直腿延长阻力臂来发展肌肉力量。
杠杆原理的生活应用示意图

杠杆原理的生活应用示意图1. 引言杠杆原理是物理学中的一个重要概念,它在日常生活中有着广泛的应用。
本文将就几个常见的生活应用场景,通过列点方式展示这些应用。
2. 工具在生活中,我们常常使用杠杆原理来辅助完成一些工作。
下面列举几个常见的工具应用:•梯子:梯子是杠杆原理的应用之一。
当我们需要到达高处时,梯子可以提供支持,让我们站在梯子上,通过杠杆的原理来提供足够的力量,轻松到达目标高度。
•起重机:起重机也是杠杆原理的应用之一。
通过杠杆的力量,起重机可以轻松地举起重物。
这大大提高了工程施工的效率,减少了人力成本。
•刀具:在日常生活中,刀具是我们常用的工具之一。
通过底刀作为支点,刀片作为杆的一端,我们可以用较小的力量切割或割开较硬的物体。
3. 运动和健身杠杆原理也在运动和健身领域有着重要的应用。
下面列举几个例子:•弓箭:弓箭时古老的武器。
它利用弓弦作为杠杆,将拉弓的力量转化为箭的能量,实现远程攻击。
•哑铃:在健身房中,哑铃是常见的健身工具。
当我们使用哑铃进行举重运动时,杠杆原理可以帮助我们更有效地锻炼肌肉。
•跷跷板:跷跷板是儿童乐园常见的游乐设施。
通过杠杆原理,两端的人可以轻松地实现协同运动,增强协调能力和平衡能力。
4. 机械原理在工程和机械领域,杠杆原理是必须掌握的基本原理。
下面列举几个例子:•车床:车床是金属加工工程中常用的机床。
通过杠杆原理,车床可以通过手柄的操作,实现对工件的加工和切削。
•扳手:扳手是常见的修理工具。
通过扳手的设计和杠杆原理,我们可以用较小的力量扭动螺栓或螺母,实现紧固或松开。
•自行车:自行车是大家常见的交通工具。
自行车通过踩踏脚蹬,将人体的力量转化为车轮的动力,实现前进。
5. 日常生活在日常生活中,我们在很多方面都可以看到杠杆原理的应用。
下面列举几个例子:•钳子:钳子作为工具,利用其设计和杠杆原理,可以夹住物体,实现夹持和固定。
•鞋拔:鞋拔是我们常用的日常用品之一。
通过杠杆原理,鞋拔可以帮助我们轻松地将鞋子从脚上脱下。
常用的人体力学原理.

作者:孙孟军
第9页/共11页
教育部老年服务与管理专业教学资源库
3.1 平衡原理的特点
常用的人体力学原理
支撑面的大小与稳定度成正比 支撑面越大,人或物的稳定性越好。如,老年人在行走时,通过借
助拐杖扩大支撑面来增加身体的稳定性。
作者:孙孟军
第10页/共11页
教育部老年服务与管理专业教学资源库
杠杆。
作者:孙孟军
第4页/共11页
教育部老年服务与管理专业教学资源库
常用的人体力学原理
1.2 省力杠杆
阻力点在支点和力点之间。杠杆运动幅度小,但效应 大,所以省力,例如人在提足跟时。
作者:孙孟军
图2 足部杠杆作用
第5页/共11页
教育部老年服务与管理专业教学资源库
1.3 速度杠杆
常用的人体力学原理
面积。
常用的人体力学原理
作者:孙孟军
第8页/共11页
教育部老年服务与管理专业教学资源库
常用的人体力学原理
3.1 平衡原理的特点
物体的重量与稳定度成正比 相同体积下,人或物的质量越大,稳定性越好
物体重心高度与稳定度成反比 当人垂直双臂站立时,重心位于骨盆的第二骶椎前约7cm处;手臂 上举过头时,重心上升;身体下蹲,甚至吸气时膈肌下降,重心也
✓护理床、轮椅等物体的轮子加油后,可以减小接触面的摩擦系数降 低摩擦力,利于使用
✓在浴室或者老年拐杖前增加橡皮垫,增加摩擦系数加大摩擦力,防 止老年人跌倒。
作者:孙孟军
第7页/共11页
教育部老年服务与管理专业教学资源库
3、平衡原理
平衡的基本原理是重心低, 支撑面大,重力线在支撑面以内时
物体的稳定度大。 重心是重量的中心。人体重心的 位置随着四肢和躯干的姿势而改变。 重力线是自重心垂直于地面的线。 支撑面是指人或物体与地面的接触
杠杆原理在人体中的应用副本
➢ 第二类杠杆:省力杠杆 阻力点在支点和动力点之间
➢ 第三类杠杆:费力(速度)杠杆 动力点在支点和阻力点之间
3.1第一类杠杆
平衡杠杆
➢ 支点位于动力点和阻力点之间 ➢ 传递力和平衡,即产生力又产生速度
阻力F2 阻力臂L2
动力F1 动力臂L1
支点
3.2第二类杠杆
省力杠杆
➢ 阻力点在支点和动力点之间
支点
➢ 动力臂大于阻力臂,用较小的力
克服较大的阻力
= F1 X L1 F2 X L2
小大
大小
阻力F2
动力F1
阻力臂L2 动力臂L1
3.3第三类杠杆
费力(速度)杠杆
➢ 动力点在支点和阻力点之间
➢ 动力臂小于阻力臂,动力小于阻力 支点 ➢ 获得较大的运动速度和幅度
= F1 X L1 F2 X L2
大
小
小
大
动力F1 动力臂L1
阻力臂L2
阻力F2
人体中普遍存在杠杆系统
4.人体中的杠杆
➢ 支点: 关节 ➢ 动力: 收缩的肌肉 ➢ 阻力: 肢体的重力,拮抗肌张力,韧带
筋膜的张力,外物的重力
4.人体中的杠杆
4.人体中的杠杆
4.人体中的杠杆
Force
second-class lever
4.人体中的杠杆
? Fi X Li Fo X Lo
2.杠杆的力学原理
力矩
➢ 物理学里,作用力促使物体绕着转动轴或支点转动的趋向 ➢ 大小为力与力臂的乘积,单位牛顿.米 ➢ 方向逆正顺负
力臂
➢ 支点到力的作用线的垂直距离。 ➢ 与动力对应的力臂叫动力臂 ➢ 阻力对应的力臂叫阻力臂
杠杆的原理和应用课件

杠杆的原理和应用课件一、杠杆的定义和基本原理•杠杆是一种简单机械,由杠杆臂、支点和作用力构成。
•杠杆臂是杠杆的一个部分,作用力作用于杠杆臂上,支点是杠杆的旋转点。
•杠杆遵循力矩平衡原理,即力矩的乘积相等。
二、杠杆的种类1. 一级杠杆•一级杠杆的支点在中间,作用力和负载力分别在支点两端。
•一级杠杆典型的例子是平衡木和秋千。
2. 二级杠杆•二级杠杆的支点在一侧,作用力和负载力分别在支点的两侧。
•二级杠杆的典型例子是推土机的杆臂。
3. 三级杠杆•三级杠杆的支点在一侧,作用力和负载力都在支点同侧。
•三级杠杆的典型例子是人体的肌肉运动。
三、杠杆的应用1. 杠杆在物理学中的应用•杠杆是物理学中一个重要的概念,广泛应用于力学、静力学等方面。
•杠杆可以通过改变杠杆臂、作用力和负载力来实现平衡或输出更大的力。
•杠杆的原理在物理学中有广泛的应用,如工程中的起重机和桥梁结构的设计。
2. 杠杆在工程中的应用•杠杆原理在工程中被广泛运用,例如桥梁、摩天大楼的建造等。
•杠杆可以通过合理设计,减小负载力对结构造成的压力,提高结构的稳定性。
•杠杆的应用能够使得工程设计更加经济、合理,提高工程的承载能力。
3. 杠杆在生活中的应用•杠杆在我们的日常生活中随处可见,例如开门、撬锁等。
•通过合理运用杠杆原理,可以轻松完成一些看似困难的任务。
•杠杆的应用使得我们的生活更加便利,提高了效率。
四、杠杆的优缺点1. 优点•杠杆可以通过合理设定杠杆臂和作用力,将小力量放大,实现更大的输出力。
•使用杠杆可以使得工程设计更加经济合理,提高结构的承载能力。
•在生活中,合理利用杠杆可以简化很多工作,提高效率。
2. 缺点•杠杆运用不当或设计不合理时,可能会导致系统失衡或者杠杆断裂等问题。
•杠杆的使用需要一定的技术和知识,不当使用可能导致事故发生。
•杠杆的应用需要考虑材料的强度和稳定性等因素,设计复杂度较高。
五、总结•杠杆是一种简单机械,可以通过改变杠杆臂和作用力的位置,实现力量的放大和平衡。
人教版《杠杆》ppt课件pptx

每个小组选派一名代表上台展示本组的讨论成果,包括杠杆在生活中的应用实例、存在的 问题以及改进的建议等。其他小组和教师可以对展示内容进行评价和补充,促进课堂交流 和互动。
谢谢您的聆听
THANKS
高性能的杠杆结构。
陶瓷材料
陶瓷材料具有高硬度、高耐磨性 和高化学稳定性等特点,可用于
制造特殊要求的杠杆部件。
精密制造技术提升杠杆性能
精密铸造技术
01
通过精密铸造技术,可以制造出形状复杂、精度高的杠杆部件
,提高杠杆的整体性能。
精密加工技术
02
采用先进的加工设备和工艺,对杠杆进行高精度加工,可以提
高杠杆的表面质量和装配精度。
压实机械
如压路机,其振动轮通过杠杆机构将激振 力传递给被压实的材料,达到压实效果。
交通运输领域杠杆作用
01
02
03
汽车制动系统
汽车制动器中的杠杆机构 可以将驾驶员的踏板力放 大,使车轮产生足够的制 动力。
火车制动系统
火车制动器中也采用了杠 杆原理,通过小力控制大 力,确保列车在紧急情况 下能够迅速停车。
挖掘机
挖掘机的铲斗通过液压缸和杠杆机 构的组合实现挖掘和卸载动作。
人体中杠杆结构剖析
骨骼杠杆
人体骨骼中许多部位都存在着杠杆结 构,如肘关节、膝关节等。这些杠杆 结构使得人体可以完成各种复杂的动 作。
肌肉杠杆
人体肌肉通过肌腱与骨骼相连,构成 肌肉杠杆。肌肉收缩时产生的拉力通 过肌腱传递给骨骼,使骨骼绕关节转 动。
3D打印技术
3D打印技术可以实现复杂结构的快速制造,为杠杆的创新设计和制造总结回顾与课堂互动环节
关键知识点总结回顾
杠杆的定义和原理
(骨生物力学课件)人体运动的杠杆原理

2020/10/4
3
有关杠杆的名词
▪ 力矩(M) 表示力对物体转动作用的大小,是力和力臂的乘积,即M=E×d。 ▪ 阻力矩(Mw)阻力和阻力臂的乘积为阻力矩,即Mw=W×dw。
阻力臂dw
W 阻202力0/1点0/4或重力点
力臂d 支点F
E力点
6
杠杆的分类
第1类杠杆: 又称平衡杠杆
—特征:支点在力点与阻力 点中间。
14
杠杆原理在康复医学中的应用
2. 获得速度: 许多动作不要求省力,而要求获得较大的
运动速度和幅度,如投掷物体、踢球、挥拍 击球等。为使阻力点移动距离和速度增大, 就要增长阻力臂和缩短力臂。
2020/10/4
15
2020/10/4
16
举例:
人体中大多数杠杆虽属速度杠杆,但 为了获得更大速度,常需使几个关节组 成一个杠杆臂,这就要求肢体伸展,如 掷铁饼时,就要先伸展手臂。有时甚至 需要附加物体延长阻力臂,如利用球棒 或球拍来延长阻力臂。
1. 省力:要用较小的力去克服较大阻力,就要缩 短阻力臂或延长力臂。在人体杠杆中肌肉拉力 的力臂一般都很短,人体有一些补偿机制可以 使之增大。
2020/10/4
10
2020/10/4
举例:
通过籽骨来增长力臂,如膑 骨就延长了股四头肌的力臂。
11
举例:
通过肌肉在骨上附着点的隆起、突起来 延长力臂,如股骨大转子就增大了臀中肌、 臀小肌的力臂,小转子则延长了髂腰肌的 力臂。
人体运动的杠杆原理
141002047 林威
▪ 阿基米德有一句豪言壮语――“给我一根杠 杆和一杆原理
人体在进行正常的运动时,肌肉收缩产生的实 际力矩输出,受到运动节段杠杆效率的影响, 因而人的运动均遵循杠杆原理,各种复杂的人 体运动均可以分解为一系列的杠杆运动。
人体中的杠杆(共7张PPT)
屈肘举哑铃(球)的杠杆分析
手是一个杠杆,腕关节是支点,球压在掌心上的力是阻力,通过前臂中的伸肌伸展和屈肌收缩产生动力,使托住铁球的手向上运动。
屈肘举哑铃肉(球作)的用杠杆于分析小腿骨骼组
尽管人体的各种运动相当复杂,但最基本的运动都是由骨骼绕关节转动产生的,其模型就是杠杆。
成的杠杆模型在转动。 当上臂中的肱三头肌伸展、肱二头肌收缩时,肌肉收缩产生的拉力使前臂骨骼绕肘关节转动。
当上臂中的肱三头肌伸展、肱二头 肌收缩时,肌肉收缩产生的拉力使 前臂骨骼绕肘关节转动。
因此手握哑铃向上运动。
托铅球的屈肘锻炼
托铁球转腕的杠杆分析
当你托住一只铁球并绕腕关节向上转动时:
手是一个杠杆,腕关节是支点,球压在掌心
上的力是阻力,通过前臂中的伸肌伸展和 当你摆手的时候,或是咀嚼食物的时候,你用到了杠杆。
人体中形形色色的杠杆
当你摆手 的时候, 或是咀嚼 食物的时 候,你用 到了杠杆。
你知道它 们的原理 吗?
人体中形形色色的杠杆
当你拉小提 琴的时候, 你在使用你 手臂和手指 构成的杠杆。
你想了解它 们的原理吗?
人体中的杠杆
人体中的杠杆
骨骼、肌肉和关节构成了人体的运动 系统。
尽管人体的各种运动相当复杂,但最 基本的运动都是由骨骼绕关节转动产 生的,其模型就是杠杆。
人体中的杠杆
人的手臂绕肘关节转动, 可以看成是由肌肉和手
臂骨骼组成的杠杆模型 当你拉小提琴的时候,你在使用你手臂和手指构成的杠杆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ppt课件
19
期待您的指导
ppt课件
20
ppt课件
? Fi X Li Fo X Lo 6
2.杠杆的力学原理
力矩
物理学里,作用力促使物体绕着转动轴或支点转动的趋向 大小为力与力臂的乘积,单位牛顿.米 方向逆正顺负
力臂
支点到力的作用线的垂直距离。 与动力对应的力臂叫动力臂 阻力对应的力臂叫阻力臂
ppt课件
7
3.杠杆的分类
杠杆在人体中的应用
ppt课件
1
目录
杠杆的定义 杠杆的力学原理 杠杆的分类 人体中的杠杆
ppt课件
2
1.杠杆的定义
物理学中,在力的作用下,能绕某一固定点或轴转动 的硬棒,叫做杠杆
ppt课件
3
1.杠杆的定义
杠杆五要素
支点: 杠杆绕着转动的点 动力: 使杠杆转动的力 阻力: 阻碍杠杆转动的力 动力臂: 从支点到动力作用线的垂直距离 阻力臂: 从支点到阻力作用线的垂直距离
ppt课件
4
2.杠杆的力学原理
力矩
物理学里,作用力促使物体绕着转动轴或支点转动的趋向 大小为力与力臂的乘积,单位牛顿.米 方向逆正顺负
ppt课件
5
1.杠杆的定义
杠杆五要素
支点: 杠杆绕着转动的点 动力: 使杠杆转动的力 阻力: 阻碍杠杆转动的力 动力臂: 从支点到动力作用线的垂直距离 阻力臂: 从支点到阻力作用线的垂直距离
支点,施力作用点,阻力作用点位置的不同,杠杆可分为以下三类
第一类杠杆:平衡杠杆 支点位于动力点和阻力点之间
第二类杠杆:省力杠杆 阻力点在支点和动力点之间
第三类杠杆:费力(速度)杠杆3.1第一类杠杆
平衡杠杆
支点位于动力点和阻力点之间 传递力和平衡,即产生力又产生速度
ppt课件
18
参考资料
• 黄晓琳,2013 . 人体运动学 . 人民卫生出版社,16-18 • Nancy Hamilton , 林文心译 , 2012 . 肌动学 : 人体动作的科学基础.合记图书出版社,333-346 • Margareta Nordin , 郭霞译,2008 . 肌肉骨骼系统基础生物力学.人民卫生出版社,2-4
筋膜的张力,外物的重力
ppt课件
13
4.人体中的杠杆
ppt课件
14
4.人体中的杠杆
ppt课件
15
4.人体中的杠杆
ppt课件
16 Force
second-class lever
4.人体中的杠杆
ppt课件
17
小结
在力的作用下,能绕某一固定点转动的硬棒,叫做杠杆 杠杆五要素:支点,动力,阻力,动力臂,阻力臂 物理学里,作用力促使物体绕着转动轴或支点转动的趋向称为力矩 杠杆分为平衡杠杆,省力杠杆,费力(速度)杠杆三类 人体中杠杆的分析
阻力F2 阻力臂L2
动力F1 动力臂L1
ppt课件
支点
9
3.2第二类杠杆
省力杠杆
阻力F2
动力F1
阻力点在支点和动力点之间
支点
动力臂大于阻力臂,用较小的力
克服较大的阻力
阻力臂L2
= F1 X L1 F2 X L2
小大
大小
动力臂L1
ppt课件
10
3.3第三类杠杆
费力(速度)杠杆
动力点在支点和阻力点之间
动力臂小于阻力臂,动力小于阻力 支点 获得较大的运动速度和幅度
= F1 X L1 F2 X L2
大
小
小
大
ppt课件
动力F1 动力臂L1
阻力臂L2
阻力F2
11
人体中普遍存在杠杆系统
ppt课件
12
4.人体中的杠杆
支点: 关节 动力: 收缩的肌肉 阻力: 肢体的重力,拮抗肌张力,韧带