异步电动机矢量控制系统的仿真
异步电动机矢量控制系统的设计与仿真.doc
异步电动机矢量控制系统的设计与仿真.异步电动机矢量控制系统的设计与仿真在矢量控制技术出现之前,现代交流调速系统采用了恒压频比控制策略。
这种控制策略的缺点是,当电机低速旋转或在加减速、负载加减等动态条件下,系统性能显著降低,导致交流调速系统在低速、启动时转矩的动态响应和整个系统的稳定性方面不如DC调速系统,无法满足人们对高精度的要求。
后来,交流异步电动机控制开始从标量控制向矢量控制迈进。
以下是矢量控制理论的简要介绍。
矢量控制发展的基础和核心理论支撑是电机的一些概念,如坐标转换原理、机电能量转换理论等。
这种控制的基本思想和方法是将异步电机模拟成DC电机来控制。
只要建立等效于三相交流绕组组的两相绕组,就可以建立等效于异步电机的DC电机模型,并增加相应的比例积分调节环节,从而可以按照DC 电机的控制策略来控制异步电机。
因此,矢量控制可以实现对电机电磁转矩的动态实时控制,从而优化和提高调速性能。
根据这一思想,我在本项目中成功地进行了MATLAB仿真。
关键词:交流电机;矢量控制调速系统;矢量控制系统的设计与仿真交流调速系统的仿真采用常V/f比控制方法,通常称为标量控制。
采用这种方法的系统在电机低速运行时或在加速、减速、增加负载、减少负载等情况下会出现重大缺陷。
采用矢量控制的交流电机可以达到与恒流电机相同的控制性能,从此交流异步电机控制从标量控制向矢量控制迈进了一大步。
以下是矢量控制理论的简要介绍。
矢量控制发展的基础和核心理论支撑是电机的一些概念,如坐标转换原理、机电能量转换理论等。
这种控制的基本思想和方法是将异步电机模拟成DC电机来控制。
只要建立等效于三相交流绕组组的两相绕组,就可以建立等效于异步电机的DC电机模型,并增加相应的比例积分调节环节,从而可以按照DC电机的控制策略来控制异步电机。
因此,矢量控制可以实现对电机电磁转矩的动态实时控制,从而优化和提高调速性能。
根据这一思想,我在本项目中成功地进行了MATLAB仿真。
异步电动机矢量控制系统仿真研究

摘要 :以异步电机矢量控制原理为基础 ,通过坐标变换和转子磁链位置计算 ,利用 M t b i u n 构建一种异 步电动机矢量 控 aa/m lk l S i 制系统的模型。通过 仿真不仅验证 了模型的正确性 ,而且 还为实际调速 系统控制算法实现提供可靠的分析 依据 。 关键词 : 矢量 控制 ;异步 电动机 ;M t b i u n a a 矩
分别独立控制 ,从而使交 流电动
收稿 日期 :2 1 一l ~0 01 1 2
— 嚣
图 1 异步电动机矢量控制 系统结构 图
耳 曩 — —— — — — —下 尊 碍
弱 j ]
L l l 4 一一l —ll 0L i \
Ab t a t s r c :Ac o d n o t e ba i rn i ls o n u t n moo e tr c n r l a smu a i n mo e f s e d o h nn r t r ue n c r i g t h sc p i c p e f i d c i t r v e o o to , i l t d l o p e ft e i e o q a d o o
1 言 引
直 流 电动 机调 速 系 统具 有 优 良的静 、动态 调
机具 有 了直 流 电动机 的全 部点 。 由于 直轴 和 转 子 磁场 重合 ,因此 也称 转子 磁场定 向控 制 。
速 特性 ,其 根本 原 因在 于作为控 制对象 的他励
直 流 电动 机 电磁 转 矩 能 够 容 易 而 灵 活 地 进 行 控 制 ” 。。在 17 年 德 国学 者提 出 的矢量变 换控 制方 91 法 中 ,正 交 旋 转 坐标 系 的直 轴 励 磁 轴 ( 与 转 子 磁 场 重 合 ,交 M) 轴为转矩轴 () T ,转 子磁 场 的交 轴 分 量 为 零 , 电磁转 矩 的方 程 得
异步电动机矢量控制系统仿真研究
异步电动机矢量控制系统仿真研究摘要:本文以异步电机矢量控制原理为基础,通过坐标变换和转子磁链位置计算,利用Matlab/Simulink 构建一种异步电动机矢量控制系统的模型。
通过仿真不仅验证了模型的正确性,而且还为实际调速系统控制算法实现提供可靠的分析依据。
关键词:矢量控制;异步电动机;Matlab/Simulink1 引言直流电动机调速系统具有优良的静、动态调速特性,其根本原因在于作为控制对象的他励直流电动机电磁转矩能够容易而灵活地进行控制[1-2]。
在1971 年德国学者提出的矢量变换控制方法中,正交旋转坐标系的直轴励磁轴(M)与转子磁场重合,交轴为转矩轴(T),转子磁场的交轴分量为零,电磁转矩的方程得到简化,即在磁场恒定的情况下,电磁转矩与交轴电流分量成正比,因此,感应电机的机械特性与他励直流电机的机械特性完全一样,实现了磁场和转矩的解耦控制。
像直流调速系统一样,实现了交流电动机的磁通和转矩分别独立控制,从而使交流电动机具有了直流电动机的全部点。
由于直轴和转子磁场重合,因此也称转子磁场定向控制[3-5]。
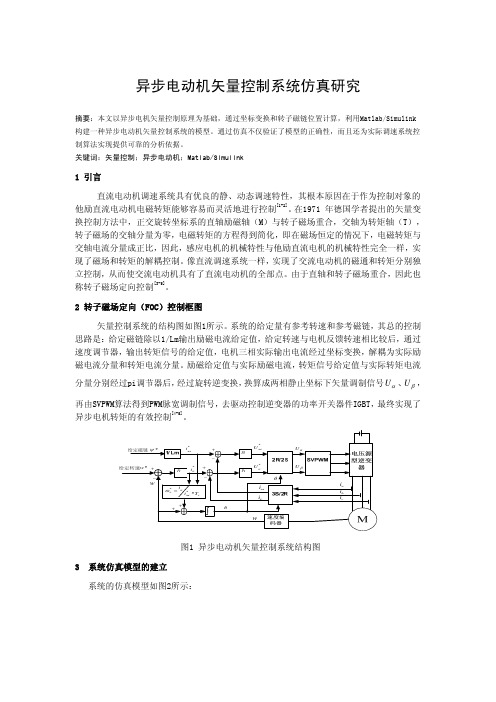
2 转子磁场定向(FOC)控制框图矢量控制系统的结构图如图1所示。
系统的给定量有参考转速和参考磁链,其总的控制思路是:给定磁链除以1/Lm输出励磁电流给定值,给定转速与电机反馈转速相比较后,通过速度调节器,输出转矩信号的给定值,电机三相实际输出电流经过坐标变换,解耦为实际励 磁电流分量和转矩电流分量。
励磁给定值与实际励磁电流,转矩信号给定值与实际转矩电流分量分别经过pi调节器后,经过旋转逆变换,换算成两相静止坐标下矢量调制信号αU 、βU ,再由SVPWM算法得到PWM脉宽调制信号,去驱动控制逆变器的功率开关器件IGBT,最终实现了异步电机转矩的有效控制[4-5]。
PI图1 异步电动机矢量控制系统结构图3 系统仿真模型的建立 系统的仿真模型如图2所示:图2 异步电动机矢量控制系统仿真图3.1 主要仿真模块介绍3.1.1 速度、转矩、磁链调节器模块三个调节器的参数值如表1;三个调节器的内部接线结构如图3所示。
异步电动机矢量控制系统设计与仿真研究

异步电动机矢量控制系统设计与仿真研究THE DISIGN OF THE ASYNCHRONOUS MOTOR VECTOR CONTROL SYSTEM AND IT`S SIMULATION STUDY专业:电气工程及其自动化姓名:高智指导教师:申请学位级别:学士论文提交日期:学位授予单位:天津科技大学摘要本文的研究内容是“异步电动机矢量控制系统设计与仿真研究”。
在矢量控制技术出现之前,交流调速系统多为V / f比值恒定控制方法,又常称为标量控制。
采用这种方法在低速及动态(如加减速)、加减负载等情况时,系统表现出明显的缺陷,所以交流调速系统的稳定性、启动、低速时的转矩动态相应都不如直流调速系统。
随着电力电子技术的发展,交流异步电机控制技术全面从标量控制转向了矢量控制,采用矢量控制的交流电机完全可以和直流电机的控制效果相媲美,甚至超过直流调速系统。
矢量控制是在电机统一理论、机电能量转换和坐标变换理论的基础上发展起来的。
它的思想就是将异步电动机模拟成直流电动机来控制,通过坐标变换,将定子电流矢量分解为按转子磁场定向的两个直流分量并分别加以控制,从而实现磁通和转矩的解耦控制,建立三相交流绕组、两项交流绕组和旋转的直流绕组三者之间的等效关系,从而求出异步电动机绕组等效的直流电机模型,以便按照对直流电机的控制方法对异步电机进行控制。
因此他可以实现对电机电磁转矩的动态控制,优化调速系统的性能。
本文针对异步电动机磁链闭环矢量控制进行研究和探索。
通过空间矢量的坐标变换,对系统进行建模,其中包括直流电源、逆变器、电动机、转子磁链电流模型、ASR、ATR、AΨR等模块。
并对控制系统进行了MATLAB/Simulink仿真分析。
关键词:异步电动机;矢量控制;MATLAB仿真ABSTRACT:The content of this study is the design of the Asynchronous motor vector control system and it's simulation study. Before the advent of vector control technology, most of alternating current speed control system are constant V/f ratio control method which is also often referred as the scalar control. This approach in low-speed and dynamic (such as acceleration and deceleration), such as addition and subtraction load, the system showed obvious defects, so the stability of AC variable speed system, start torque at low speed dynamic response is not such as a DC tune speed system. With the development of power electronics technology, the AC induction motor control technology fully from the scalar control to vector control, vector control of AC motor can be comparable and DC motor control effects, even more than the DC speed control system.Vector control is developed on the basis of the motor unified theory of electrical and mechanical energy conversion and coordinate transformation theory. Its ideology is the asynchronous motor simulation into a DC motor to control, coordinate transformation, decomposition of the stator current vector for the rotor field oriented two DC components were controlled, in order to achieve the decoupling of flux and torque control, three-phase AC winding, two exchanges winding and rotation of the DC winding equivalence between the three, in order to find the equivalent asynchronous motor winding DC motor model, in order to control the DC motor control method for asynchronous motor . So that he can achieve dynamic control of the electromagnetic torque, optimize the performance of the speed control system. In this paper, the closed-loop vector control of asynchronous motor flux research and exploration. By the coordinates of the space vector transformation of the system modeling, including a DC power supply, inverter, motor, the rotor flux current model, the ASR, ATR AΨR and other modules. And control system for the MATLAB / SIMULINK simulation analysis.Key Words:Asynchronous Motor;Vector Control;MATLAB Simulation目录第一章绪论 (1)第一节交直流调速系统的相关概念及比较 (1)第二节交流调速系统的历史和现状 (2)第三节异步电机矢量调速系统的发展 (5)第二章异步电动机的数学建模分析 (7)第一节三相电机的模型分析 (7)第二节同步旋转坐标系上的数学模型及状态方程 (11)第三节异步电动机的数学模型 (12)第四节坐标变换和变换矩阵 (13)第五节异步电动机在不同坐标系下的数学模型 (20)第三章异步电动机矢量控制的基本原理 (23)第一节异步电机的电磁转矩 (23)第二节矢量控制思路的演变过程 (23)第三节矢量控制的磁场定向 (26)第四节转子磁链观测器 (28)第五节异步电机矢量控制系统 (30)第四章异步电动机矢量控制系统的仿真分析 (33)第一节SIMULINK软件基本介绍 (33)第二节异步电机矢量控制系统仿真模型的建立 (33)第三节各模块参数设置 (36)第四节仿真结果 (37)第五章全文总结 (40)参考文献 (41)致谢 (42)第一章绪论第一节交直流调速系统的相关概念及比较电动机+控制装置=电力传动自动控制系统。
基于Matlab异步电动机矢量控制系统的仿真

基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。
异步电机矢量控制Matlab仿真实验
目录1. 矢量控制基本原理: (1)2.电机模型推导: (2)3。
仿真模型框图 (5)3。
1 坐标系下异步电机的仿真模型 (5)3。
2各元件的参数图 (6)3.3三相异步电机的仿真模型 (8)3。
4各模块的原理图 (9)3.5仿真的初始数据 (10)4 矢量控制系统设计 (11)4.1 矢量控制系统的电流闭环控制方式思想 (11)4。
2 MATLAB系统仿真系统设计 (11)4.3 PI调节器设计 (13)5.仿真结果 (15)6.个人总结 (17)7。
参考文献 (18)异步电机矢量控制Matlab仿真实验1. 矢量控制基本原理:矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1-1所示,在三相坐标系上的定子交流电流,,A B C i i i ,通过3/2变换可以等效成两相静止正交坐标系上的交流s i α和s i β再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流sm i 和st i 。
m 绕组相当于直流电动机的励磁绕组,sm i 相当于励磁电流,t 绕组相当于电枢绕组,st i 相当于与转矩成正比的电枢电流。
其中矢量控制系统原理结构图如图1—2所示。
图1—1 异步电动机矢量变换及等效直流电动机模型图1—2矢量控制系统原理结构图通过转子磁链定向,将定子电流分量分解为励磁分量sm i 和转矩分量st i ,转子磁链r ψ仅由定子电流分量sm i 产生,而电磁转矩e T 正比与转子磁链和定子电流转矩分量的乘积,实现了定子电流的两个分量的解耦。
异步电机矢量控制系统的设计及仿真研究
-
G^(
s)
R( ]
s)
+
1 - C( s) G^( s)
1 + C( s) [G( s)
-
G^(
s)
D( ]
s)
( 7)
由式( 7) 可知,当模型与对象匹配,即 G^( s) = G( s) 时,若
选择 C( s) = G^ - 1 ( s) 且此时系统可实现,则式( 7) 变为 Y( s)
= R( s) ,即系统的输出始终等于输入,不受任何干扰。此外,
+ +
1 1
·2λλss
++11·s
( 11)
由式( 5) 可得基于内模控制的速度调节器为:
F( s)
=
(
Tc s
+ 1) ( 2λs Kλ2 s
+ 1)
( 12)
显然这也是一种 PID 调节器,但是它只有一个可调参数 λ。
图 5 矢量控制变频调速系统近似动态结构图
5 仿真试验结果
为验证本方案的有效性,搭建矢量控制系统如图 7 所 示,速度调节器采用内模控制方法。
收稿日期: 2011 - 03 - 13
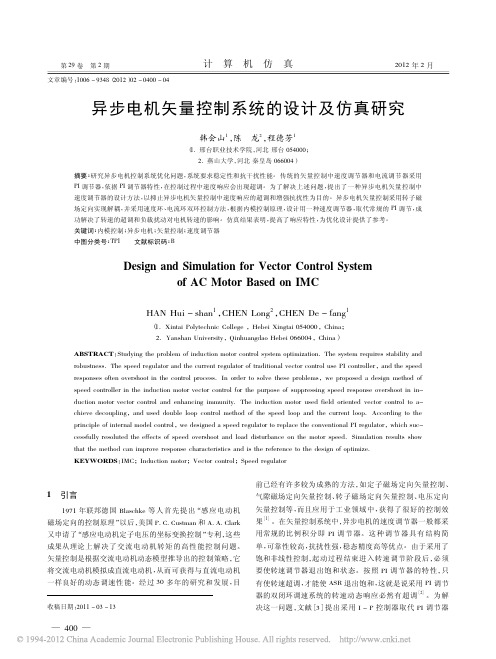
前已经有许多较为成熟的方法,如定子磁场定向矢量控制、 气隙磁场定向矢量控制、转子磁场定向矢量控制、电压定向 矢量控制等,而且应用于工业领域中,获得了很好的控制效 果[1]。在矢量控制系统中,异步电机的速度调节器一般都采 用常规的比例积分即 PI 调节器。这种调节器具有结构简 单,可靠性较高,抗扰性强,稳态精度高等优点。由于采用了 饱和非线性控制,起动过程结束进入转速调节阶段后,必须 要使转速调节器退出饱和状态。按照 PI 调节器的特性,只 有使转速超调,才能使 ASR 退出饱和,这就是说采用 PI 调节 器的双闭环调速系统的转速动态响应必然有超调[2]。为解 决这一问题,文献[3]提出采用 I - P 控制器取代 PI 调节器
异步电机矢量控制系统的仿真建模与实现

Z U Y a WA G L I hn—a , I i— n HO u n , N i,QU Z ogci L nl g J o
( . h teeti E gn eigIsi t , o tw s Ja tn nvri , h n d 10 1 C ia 1 P ool rc nier ntue S uh et ioo gU ies y C e g u60 3 , hn ; c n t t 2 E i a u , o twet ioo gUnvri , me 64 0 , hn ) . me C mp s S u h s atn i est E i 12 0 C ia J y
控制 ( 矢量控 制 ) 的方 法 ;建 立 了一 种在 转 子 坐 标 系下 异 步 电机 的 矢量 控 制 系统仿 真模 型 ; 即 仿真 结果 表 明 ,基 于矢量控 制 的方 法 能 够 实现 对 异 步 电机 的 解耦 ,即通 过 控 制励 磁 电流 分 量和 转矩 电流 分 量的 大小直接 控 制异 步 电机 磁 场 和 转 矩 ,使 交流 异 步 电机 获 得 和 直 流 电机 相媲 关的
21 0 2年第6 期
文 章 编 号 :0 9— 5 2 2 1 ) 6 15— 6 10 2 5 (0 2 0 —0 9 0 中 图 分 类 号 :P 9 T 31 文 献 标 识码 : A
异 步 电机 矢 量 控 制 系统 的仿 真 建模 与 实现
周 源 ,王 黎 ,邱 忠才 ,李 金 龙
( .西南交 通大 学光 电工程研究所 ,成都 6 0 3 ;2 1 10 1 .西南 交通 大学 峨嵋校区 ,峨 嵋 64 0 ) 120
摘
要 :异 步 电机 矢量控 制是在 交流 电机 的 双 轴理 论 、机 电能 量转 换 和 坐标 变换 理论 的基 础 上
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
异步电动机矢量控制系统仿真
1.异步电机矢量控制系统的原理及其仿真
1.1 异步电动机矢量控制原理
异步电机矢量变换控制系统和直接转矩控制系统都是目前已经获得应用的高性能异步电机调速系统,对比直接转矩控制系统,矢量变换系统有可以连续控制,调速范围宽的优点,因此矢量变换控制系统为现代交流调速的重要方向之一。
本文采用的是转子磁场间接定向电流控制型交流异步电机矢量控制系统[1],如图1所示。
图1矢量变换控制系统仿真原理图
如果把转子磁链方向按空间旋转坐标系的M轴方向定向,则可得到按转子磁场方式定向下的三相鼠笼式异步电动机的矢量控制方程。
(1)
(2)
(3)
(4)
(5)
上列各式中,是转子励磁电流参考值;是转差角频率给定值;是定子电流的励磁分量;是定子电流的转矩分量;是定子频率输入角频率;
是转子速度;是转子磁场定向角度;是转子时间常数;和分别是电机互感和转子自感。
图4所示控制系统中给定转速与实际电机转速相比较,误差信号送入转速调节器,经转速调节器作用产生给定转矩信号,电机的激磁电流给定信号根据电机实际转速由弱磁控制单元产生,再利用式(1)产生定子电流激磁分量给定信号,定子电流转矩分量给定信号则根据式(2)所示的电机电磁转矩表达式生成。
、和转子时间常数Lr一起产生转差频率信号,与ωr相加生成转子磁场频率给定信号,对积分则得到转子磁场空间角度给定信号。
和经坐标旋转和2/3相变换产生定子三相电流给定信号、和,与定子三相电流实测信号、和相比较,由滞环控制器产生逆变器所需的三相PWM信号。
1.2 异步电机转差型矢量控制系统建模
在MATLAB/SIMULINK环境下利用电气系统模块库中的元件搭建交流异步电机转差型矢量控制系统[2],电流控制变频模型如图2所示。
图2 电流控制变频模型图
整个仿真图由电气系统模块库中的元件搭建组成,元件的直观连接与实际的主电路相像似,其中主要包括:速度给定环节,PI速度调节器、坐标变换模块、
磁场定向模块、滞环电流调节器、IGBT逆变器元件、异步电动机元件以及测量和显示模块。
这些元件都有设置对话框,用户可以方便的选择元件类型和设置参数。
在整个控制系统的仿真模型中,交流异步电机的模型是最重要的元件,在Powerlib中给出了各种电机模型,这大大减少了交流调速系统的建模难度。
控制系统采用转速电流双闭环控制,其中的磁场定向模块提供矢量控制坐标变换需要的磁链位置角,电机模型如图3所示。
图3 矢量控制电机模型仿真框图
1.3异步电机转差型矢量控制系统仿真
由于系统中包含非线性Powerlib模块(电机、逆变器),因此仿真采用变步长算法,这样异步电机非线性部分和逆变器的过零点才能精确的计算出来,但是这样会增加仿真步数减少仿真速度。
由于在仿真初始化过程中,Power2sys函数将逐个检查模型中的各个模块是否为Powerlib模块,这样对一个复杂系统在一定程度上会降低仿真速度。
为此我们可以人为迫使Power2sys不去检查那些常规模块,方法是在常规模块以及包含常规模块的子系统的模块名字前加一个“$”符号,这样可以提高仿真速度。
仿真过程中由于初始值选择不当或者系统中存在分式,会出现奇异点使仿真过程停止,可以在分母中加上一个很小地值或选择适当的初值避免奇异点的出现。
图2中的电压测量单元和电机输出测量单元是Simulink模块与Powerlib 模块间的接口模块,分别把电机定子电压信号和电机输出信号反馈回Simulink 模块。
电压控制信号作为Simulink模块的信号送入到Powerlib模块—异步电机
时,是通过可控电流源(IGBT逆变器)作为中间环节。
仿真时要注意二者之间的联系,防止仿真出错停止,转子磁链观测模型如图4.
图4 转子磁链观测模型
4.4 仿真结果
在MATLAB/SIMULINK6.5环境下对所建立的交流异步电机转差型矢量控制系统采用变步长方法进行仿真,其中交流异步电机参数如下:RS=1.898Ω,
LS=0.196H,Rr=1.45Ω,Lr=0.196H,Lm=0.187H,PN=3kW,UN=380V,J=0.0067kg·m2,f=50Hz,pn=2。
为了验证所设计的交流异步电机矢量控制系统模型的静、动态性能,系统空载启动,待进入稳态后,在t=0.2s时转速突加为180r/min,t=0.4s时又突减为120r/min。
待系统稳定后,t=0.6s时突加负载5Nm,t=0.8s时突减负载,重新回到空载状态。
在经过一系列转速突变和负载扰动仿真后,得到电机各个量响应输出波形如图7~12。
图4 电磁转矩波形
图5 电机转速波形
图6 定子三相电流波形
图7 dq坐标系下转子两相电流波形
图8 dq坐标系下转子磁链波形
图9 dq坐标系下定子磁链波形
由仿真波形可以看出,在的参考转速下,系统空载启动,转速很快达到给定值,电流和转矩波形较为理想。
t=0.2s时转速突加到180r/min,电流和电磁转矩相应增加,随即又到达稳定状态。
t=0.4s时转速突然下降,电流和转矩也立即跟随变化。
t=0.6s时突加负载扰动,转矩马上突变,电流也相应增加,而转速几乎没有变化。
t=0.8s时突减负载,转矩和电流同时变化,转速仍然稳定在给定的120r/min上。
定转子磁链响应也随着变化过程增大和减小。
可见,整个过程中转速给定和负载扰动频繁突变,而转速能很好的跟随给定值,且响应时间短,过渡过程快,有很好的跟随和抑制扰动的性能。
整个变化过程中电磁转矩也能够瞬间响应,并很快达到稳定。
在稳态时的转矩有很小的脉动,这主要是由于电流换向和滞环控制器频繁切换造成的,脉动大小跟滞环宽度有关。
参考文献:
[1] 李家荣,邓智全. 三相异步电动机矢量控制调速系统的建模与仿真[J].淮南工
学院学报.2001(6)
[2] 陈伯时,陈敏逊. 交流调速系统[M].北京:机械工业出版社,1998.。