遥控玩具车电路图
TX2S中文说明书及应用电路

描述
TX2S 是一顆专为遥控玩具车设计专用发射和接收的大规模集成电路,它采用先进的CMOS 工艺制造。
8PIN 封装技术,降低对封装的需求。
TX2S 内部设计A/D 转换单元,在3个输入脚中保留6个功能键(即前进、后退、左转、右转、加速及附加键)。
⏹ 主要特点:
工作电压范围(V CC ⏹ TX2S :2.0V < VCC < 6.0 =1.5~5.0V )
低静态功耗
TX2S 有自动关机功能
外围组件少
标准8PIN 封装,节省体积及成本
⏹ 管脚排列图
TX2S-DIP8/SOP8
OSC FB LR TF
PC VCC Dout
GND
⏹ 内部框图
LR FB TF
OSC
PC
Dout
⏹ 极限参数
⏹ 电气参数(除非特殊说明,Tamb=25℃,VDD=4.0V,Fosc=128KHZ )
⏹ 管脚描述
⏹ 功能描述
1. 编码方法
串行码格式一帧为 n+4 个脉冲
起始码+功能码
起始码4个 W2
功能码 n 个W 1 其中 W2 为500HZ 频宽比为3/4 W 1 为1KHZ
频宽比为1/2
2. 编码规则
a) 位格式
n X W18mSEC 8mSEC
T
4 W2
b) 数据格式
第一個字
第二個字
第三個字
12345678TX2S 任一功能鍵TX2S 的SO 編碼輸出
RX2S 功能輸出
編碼結束
功能码由n个W1脉冲组成n的不同数值分别表示不同的功能详述如下
⏹建议应用电路
●TX2S
E1A ntenna。
TX2 RX2内置稳压电动玩具车遥控芯片

概述
TX2/RX2是一对用于遥控玩具汽车的CMOS电路,有五种控制功能,即控制玩具汽车向前、向后、左转、右转和加速功能。
TX2采用DIP14和SOP14封装,RX2采用DIP16和SOP16封装。
特点
z工作电压范围:2~5V
z外接元件少
z标准振荡频率114KHz,振荡电阻200KΩ
z TX2具有静态电流低、自动切断电源等功能
z RX2内置3.6V稳压二极管,外接串联电阻降压,可提高工作电压范围
引脚排列和说明
RX2
极限值
说明:上述参数绝对不允许超出,否则器件将受到永久性损坏。
也不能在临界条件下长时间工作,否则即使不损坏器件也会影响器件的可靠性。
电特性
TX2
(VDD= 3.6V,FOSC=114KHZ,除非另有说明TA=250C)
RX2
(VDD=3.6V,FOSC=114KHZ,除非另有说明TA=250C)
功能码由n个W1脉冲组成,n的不同数值分别表示不同的功能,详述如下:
)
发射器(TX2Fosc≌114KH
Z Array)
接收器(RX2Fosc≌114KH
Z Array
红外线遥控应用电路
发射器(TX2Fosc≌114KH
)
Z
接收器(RX2Fosc≌114KHZ)
TX2的振荡频率≌RX2的振荡频率,振荡电阻取相同值。
封装尺寸图
TX2:DIP14和SOP14
RX2:DIP16和SOP16。
五功能遥控玩具车发射接收器解析
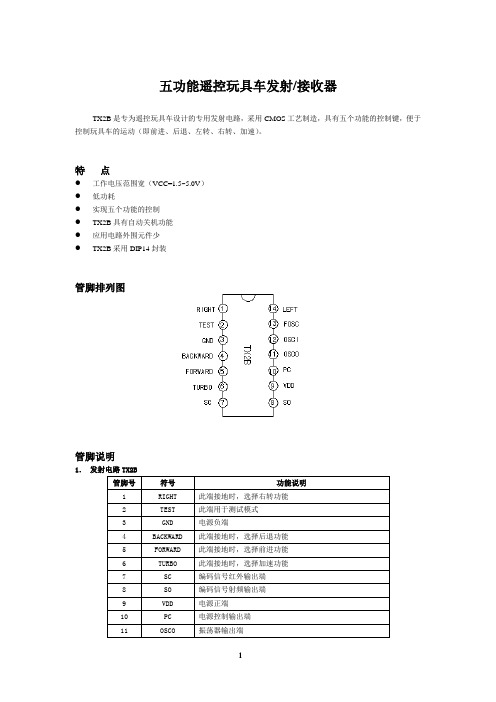
五功能遥控玩具车发射/接收器
TX2B是专为遥控玩具车设计的专用发射电路,采用CMOS工艺制造,具有五个功能的控制键,便于控制玩具车的运动(即前进、后退、左转、右转、加速)。
特点
●工作电压范围宽(VCC=1.5~5.0V)
●低功耗
●实现五个功能的控制
●TX2B具有自动关机功能
●应用电路外围元件少
●TX2B采用DIP14封装
管脚排列图
管脚说明
1.发射电路TX2B
TX2B内部管脚图
* 芯片衬底应与PCB的VDD连接
直流特性参数
1.发射电路TX2B(除非特殊说明,Tamb=25℃,Fosc=128KHZ)
2.接收电路RX2B(除非特殊说明,Tamb=25℃,Fosc=128KHZ)
射频应用示意图
红外应用示意图
3V
Ω典型射频应用图。
【LoR培训】遥控机器人制作电路接线图公布
D1
电路方案(二)参考布线——下层小板
(电机与H桥部分)
遥控机器人小车
D2
用 7.4V 长 插 针 线 D3 引 到 D0 上 层 大 板 GND
M
D1
08:44 LoR 机器人竞赛
M
8
电路方案(二)参考布线——上层大板
(电源与信号线部分)
7.4
遥控机器人小车
+
104
GND 5V D0 D1 D2 D3 VT
e
8550 8550
1k5 1k5
8050
b
c
M c
8050 8050
右轮电机正反转
7.4V
1k5
b
1k5
A
1k5 1k5
8050
D0
e D3
1k5
1k5
8050
8550
8550
D
1k5
左轮电机正反转 注意: C和D不能一起按! A和B不能一起按!
08:44
M
1k5
8050 8050
C A D B
B
遥控机器人制作电路接线图公布
【LoR机器人竞赛培训】
电路方案(一)
5V
1
7.4V
78L05
2 3
10uF +
104
104
220uF +
1. 5V输出 2. GND 3. 7V~20V输入
08:44 LoR 机器人竞赛
7.4V
经过78L05线性稳压,我们获得了一路5V电源
2
电路方案(一)
1. E 发射极 2. B 基极 3. C 集电极
-
7.4
TX2&RX2C内置升压模块电动玩具车遥控芯片

概述General DescriptionTX2/RX2C 是一对用于遥控玩具汽车的大型CMOS 电路,它具有五种控制功能:即控制玩具汽车向前向后左转右转和加速功能。
TX2有自动关机功能,当输入的端口为低电位时,TX2的SO 及SC 端口将会传送相关数据码,并利用射频电路(RF )或红外线电路(IR )将数据码传送到RX2C 并控制RX2C 的相关输出。
RX2C 内置2极放大器,透过简单的外围原理即可实现小信号放大的功能;将放大后的信号接入SI 端口便可控制RX2C 。
RX2C 内置升压电路,其输入电压可在0.8-3.3V 之间。
升压电路在1.0V 以上就稳定升压值3.6V 。
特性Features●TX22.0-4.5V 的宽工作电压5通道遥控控制:前进、后退、左转、右转及加速2种信号输出模式:射频信号及红外线信号 ⏹ 射频标准震荡频率:116KHZ ~140KHZ ⏹ 红外线标准频率:◆ 192KHz (载波为57KHZ ) ◆ 128KHz (载波为38KHZ )自动关机、内置震荡器低静态功耗14脚直插及贴片封装●RX2C宽工作电压:正常模式:1.8V ~ 5.0V 升压模式:1.0V ~ 3.3V5通道输出:前进、后退、左转、右转及加速MOD 端口控制减速功能内置高效升压电路、2极放大器、震荡器16脚直插及贴片封装⏹ 管脚图Pin AssignmentGE-TX2-DIP14/SOP14 GE-RX2C-DIP16/SOP16NC GND LEFT NC OSCI OCSO PC VDD SOGND OSCO RIGHTT LX⏹电器极限Absolute Maximum RatingsDC Supply Voltage.............................................. -0.3V to 6.0VInput / Output Voltage........................................ GND -0.2V to VDD + 0.2VStorage Temperature......................................... -25℃ to 125℃Operating temperature............................. -10℃ to 60℃Comments*Never allow a stress to exceed the values listed und er "Absolute Maximum Ratings", otherwise the d evice would suffer from a permanent damage. Nor is a stress at the listed value be allowed to persist over a period, since an extend ed exposure to the absolute maximum rating condition may also affect the reliability of the d evice, if not causing a damage thereof.⏹电器特性Electronic CharacteristicsTX2RX2C方块图Block Diagram管脚定义说明Pin Description脚位坐标图Pad LocationsTX2RX2CChip size=0.85X0.85mm 2The IC substrate must be connected to VDDChip size=1.2X0.9mm 2The IC substrate must be connected to VDD输入/输出对照表Output TablesNOTE: L=低电平, ●=高电平,○=84Hz, 2/3(66.7%) DUTY Pulse @F OSC=128KHZ应用电路Application Diagram发射射频电路GE-TX2RF Circuit接收射频电路(无升压)GE-RX2C RF Circuit(Without DC-DC)接收射频电路(有升压) GE-RX2C RF Circuit(With DC-DC)红外线发射/接收电路 IR Circuitiode 1NOTE :1. MOD=1 (Mod Pin opens)2. No using DC-DC converter because of higher supply voltage.3. Two grad e shift gears are realized电压对频率变化Variation Of VDD & F OSC规格书版本纪录。
遥控小汽车电路图

自制无线遥控小汽车电路图PT2262 无线发射PT2272 无线接收T10A发射模块XY-R04A接收模块无线遥控发射和接受原理图编码芯片PT2262 发出的编码信号由:地址码、数据码、同步码组成一个完整的码字,解码芯片PT2272 接收到信号后,其地址码经过两次比较核对后,VT 脚才输出高电平,与此同时相应的数据脚也输出高电平,如果发送端一直按住按键,编码芯片也会连续发射。
当发射机没有按键按下时,PT2262 不接通电源,其17 脚为低电平,所以315MHz 的高频发射电路不工作,当有按键按下时,PT2262 得电工作,其第17 脚输出经调制的串行数据信号,当17 脚为高电平期间315MHz 的高频发射电路起振并发射等幅高频信号,当17 脚为低平期间315MHz 的高频发射电路停止振荡,所以高频发射电路完全收控于PT2262 的17 脚输出的数字信号,从而对高频电路完成幅度键控(ASK 调制)相当于调制度为100%的调幅。
PT2262和PT2272除地址编码必须完全一致外,振荡电阻还必须匹配,一般要求译码器振荡频率要高于编码器振荡频率的2.5~8倍,否则接收距离会变近甚至无法接收,随着技术的发展市场上出现一批兼容芯片,在实际使用中只要对振荡电阻稍做改动就能配套使用。
在具体的应用中,外接振荡电阻可根据需要进行适当的调节,阻值越大振荡频率越慢,编码的宽度越大,发码一帧的时间越长。
市场上大部分产品都是用2262/1.2M=2272/200K 组合的,少量产品用2262/4.7M=2272/820K。
解码接收模块包括接收头和解码芯片PT2272两部分组成。
接收头将收到的信号输入PT2272的14脚(DIN),PT2272再将收到的信号解码。
接收板工作电压为DC 5V,接收灵敏度:-103dBm ,尺寸(mm):49*20*7 ,工作频率:315MHz,工作电流:5mA ,编码类型:固定码(板上焊盘跳接设置) 应用说明:与各类型遥控器配合使用,解码输出后进行相应控制,在通常使用中,我们一般采用8位地址码和4位数据码,这时编码芯片PT2262和解码芯片PT2272的第1~8脚为地址设定脚,有三种状态可供选择:悬空、接正电源、接地三种状态,地址编码不重复度为38=6561组,只有发射端PT2262和接收端PT2272的地址编码完全相同,才能配对使用,遥控模块的生产厂家为了便于生产管理,出厂时遥控模块的PT2262和PT2272的八位地址编码端全部悬空,这样用户可以很方便选择各种编码状态,用户如果想改变地址编码,只要将PT2262和PT2272的1~8脚设置相同即可,例如将发射机的PT2262的第2脚接地,第3脚接正电源,其它引脚悬空,那么接收机的PT2272只要也第2脚接地,第3脚接正电源,其它引脚悬空就能实现配对接收。
五功能遥控玩具车接收器

五功能遥控玩具车接收器RX2C 与TX2B 配对使用,是专为遥控玩具车设计的专用接收集成电路,。
RX2C 采用CMOS 工艺制造,具有五个遥控功能的控制键,便于控制玩具车的运动;RX2C 具有内置DC-DC 升压,可延长电池使用寿命。
特 点● 工作电压范围:VCC=1.8~5.0V (不使用DC-DC ),VCC=1.2~5.0V (使用DC-DC ) ● 低待机功耗● 实现五种遥控功能:前进、后退、左转、右转和加速 ● 可选择不同的输出格式 ● 内设仅需外接一个电阻的振荡器● 内建DC-DC ,可以在低电源电压下安全工作,具有可选性。
● 使用DC-DC 时,选用外围元件少,启动电压1.2V ,维持电压1.0V ,输出3.0V ● 与RX2B 兼容 ● 采用DIP16封装管脚排列图VI1VO1VI2VO2SI LXRIGHT LEFT OSCI GND OSCO MODBACKWARD FORWARD TURBO VDD内部框图BACKWARD VO2VI2VI1VO1SI OSCO OSCI GNDVDD RIGHTLEFT TURBO FORWARDMOD LX功能描述注:1、MOD=1时,输出格式与RX2B 相同,输出高电平2、MOD=0时,*指输出格式改变为50Hz、占空比50%的脉冲,其余输出高电平测试电路图典型射频应用图应用图1(MOD 悬空,因供电电压较高,故不使用内置DC-DC ,通过对电机供电电压的控制实现前进的二级变速)应用图2(因供电电压较低,故使用内置DC-DC ,MOD 接地,实现前进的二级变速)R14690天线R101K 后退。
遥控玩具车电路图

遥控玩具车电路图今天介绍这款遥控车采用台湾瑞昱公司生产的专用于遥控车模的CMOS大规模集成电路TX-2/RX-2。
该集成电路具有5种控制功能,即前进、后退加速、左转和右转等。
由于采用了编码发射及解码接收电路,所以具有较高的抗干扰性能。
图2为接收机电路,在发射端发出的高频信号经接收天线接收,Q1、L2、C2、C3等构成的超再生接收电路,L2、C2为并联谐振回路,其作用是选频,C3为超再生正反馈电容,调整L2可改变接收频率。
R1、R2、C5决定超再生的熄灭电压。
接收信号经R4、C7送入译码电路RX-2的{14}脚进行放大,放大后的信号由{1}脚输出经R8送入译码信号输出端{3}脚进行译码。
当译码电路将收到的信号译码后,若是前进信号,则{11}脚输出高电平,Q11导通→Q12、Q13分别导通,+4。
5V等经Q12→MA→MB→Q13→地,电机正转,车子前进,其他功能依此类推,不再赘述。
R9为振荡电阻。
RX-2中的{6}、{7}、{10}、{11}、{12}脚分别为右转、左转、后退、前进、加速等功能的输出端。
R20、D1、C1、C14组成简单的稳压电路,为RX-2提供稳定的工作电压,D2为隔离二极管。
为使该车更加美观逼真,如图2中所示。
用两只小灯泡,两只LED按图安装,小灯泡作遥控车的前大灯使用,LED为倒车灯。
当车子前进时,大灯亮,LED反偏不亮;倒车时在前大灯亮着的同时,LED为正偏也亮起来作倒车灯使用。
夜晚玩车时,更为有趣。
玩具汽车遥控接收电路:(a)图所示为接收电路,它有ABCDEFG七路输出,分别控制转向(图b);左右转向灯(图c);驱动电机(图d);音乐片发出声音(图e);刹车制动电磁铁和驱动尾部刹车灯LED5LED6发光;前后大灯开关(图g);电源(图h).遥控玩具汽车电路本例介绍的遥控玩具汽车,采用彩色电视机、影碟机等家用电器遥控器来控制其前进与后退,前进时汽车发出警笛声,后退时汽车发出“倒车,请注意!”的语音声,趣味性较强,可用于改制各种电动玩具汽车。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥控玩具车电路图
今天介绍这款遥控车采用台湾瑞昱公司生产的专用于遥控车模的CMOS大规模集成电路TX-2/RX-2。
该集成电路具有5种控制功能,即前进、后退加速、左转和右转等。
由于采用了编码发射及解码接收电路,所以具有较高的抗干扰性能。
图2为接收机电路,在发射端发出的高频信号经接收天线接收,Q1、L2、C2、C3等构成的超再生接收电路,L2、C2
为并联谐振回路,其作用是选频,C3为超
再生正反馈电容,调整L2可改变接收频率。
R1、R2、C5决定超再生的熄灭电压。
接收信号经R4、C7送入译码电路RX-2的{14}脚进行放大,放大后的信号由{1}脚输出经R8送入译码信号输出端{3}脚进行译码。
当译码电路将收到的信号译码后,若是前进信号,则{11}脚输出高电平,Q11导通→Q12、Q13分别导通,+4。
5V等经Q12→MA→MB→Q13→地,电机正转,车子前进,其他功能依此类推,不再赘述。
R9为振荡电阻。
RX-2中的{6}、{7}、{10}、{11}、{12}脚分别为右转、左转、后退、前进、加速等功能的输出端。
R20、D1、C1、C14组成简单的稳压电路,为RX-2提供稳定的工作电压,D2为隔离二极管。
为使该车更加美观逼真,如图2中所示。
用两只小灯泡,两只LED按图安装,小灯泡作遥控车的前大灯使用,LED为倒车灯。
当车子前进时,大灯亮,LED反偏不亮;倒车时在前大灯亮着的同时,LED
为正偏也亮起来作倒车灯使用。
夜晚玩车
时,更为有趣。