双波谐波传动(可控制的动态图)
高三简物理谐波及图像知识精讲

高三简物理谐波及图像【本讲主要内容】简谐波及图像波的形成:传播;图像;能量多解性及对称性问题【知识掌握】【知识点精析】一. 波的形成1. 定义:机械振动在介质中的传播过程。
2. 条件:⑴波源:振动的物体(质点)。
⑵介质:连续介质模型①质点之间有力的联系:把介质看成一系列相互联系的质点。
②受迫振动理论:以波度为超点,各质点通过质点间的力的作用,而做受迫振动。
二. 传播1. 传播什么:通过驱动力做功传播能量;以振动形式为载体传播信息;质点本身并不随波逐流。
理论:受迫振动理论:2. 波的分类横波:质点振动方向与波的传播方向垂直;典型的横波有绳波、水波等。
纵波:质点振动方向与波的传播在同一直线上;典型的纵波有声波、弹簧波等。
3. 描述(1)频率(f ):与波源的振动频率相同;由波源来决定,与介质无关;就是传播方向上每个质点做受迫振动的频率。
(2)波速(v ):波在介质中传播的速度,也是振动形式向外传播的速度;波在同一种均匀介质中是匀速传播的;波速由介质来决定,(一般来讲,介质的密度越大,传播速度越快。
在真空中则不能传播。
)与波源无关,相同性质的机械波在同一介质中传播的速度是相同的。
(3)波长定义:在波的传播方向上,两相邻的振动情况总是相同的质点间的距离。
意义:振动的形式在一个周期内传播出去的距离,在同一种均匀介质中是匀速传播的。
故v T λ=分类表达:横波:相邻两波峰(或波谷)之间的距离。
纵波:相邻两密部(或疏部)之间的距离。
三. 图像(横波)1. 定义:在波的传播过程中,某一时刻各质点离开各自平衡位置的位移的末端的连线。
横轴:表示各质点的平衡位置。
2. 规律:即形状为波浪线(正、余弦线)。
3. 意义:①描述在该时刻各质点的位移:即在横轴上找到它们的平衡位置所对应的纵坐标,既能表达大小,也能表示方向。
②表达振动的强弱,即振幅:同时也标志着能量的多少。
③表达波长:体现周期性、重复性、对称性。
④借助波的传播方向能够比较各质点在该时刻的速度方向、大小及变化。
谐波齿轮

1.结构简单,体积小,重量轻。
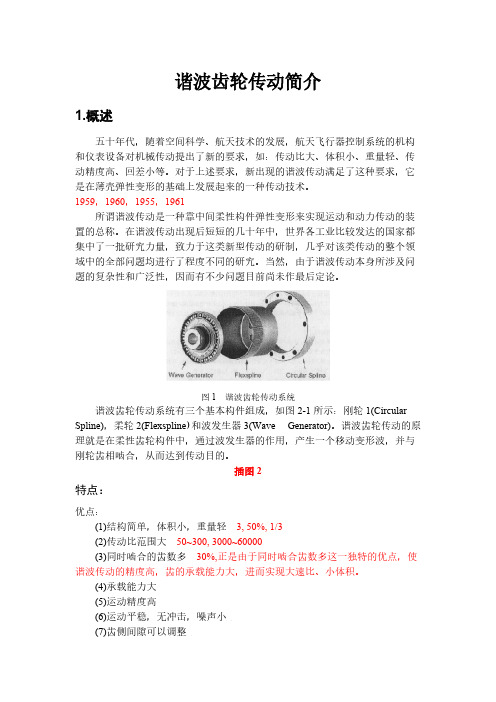
谐波齿轮传动的主要构件只有三个:波发生器、柔轮、刚轮。
它与传动比相当的普通减速器比较,其零件减少50%,体积和重量均减少1/3左右或更多。
2.传动比范围大单级谐波减速器传动比可在50—300之间,优选在75—250之间;双级谐波减速器传动比可在3000—60000之间;复波谐波减速器传动比可在200—140000之间。
3.同时啮合的齿数多。
双波谐波减速器同时啮合的齿数可达30%,甚至更多些。
而在普通齿轮传动中,同时啮合的齿数只有2—7%,对于直齿圆柱渐开线齿轮同时啮合的齿数只有1—2对。
正是由于同时啮合齿数多这一独特的优点,使谐波传动的精度高,齿的承载能力大,进而实现大速比、小体积。
4.承载能力大。
谐波齿轮传动同时啮合齿数多,即承受载荷的齿数多,在材料和速比相同的情况下,受载能力要大大超过其它传动。
其传递的功率范围可为几瓦至几十千瓦。
5.运动精度高。
由于多齿啮合,一般情况下,谐波齿轮与相同精度的普通齿轮相比,其运动精度能提高四倍左右。
6.运动平稳,无冲击,噪声小。
齿的啮入、啮出是随着柔轮的变形,逐渐进入和逐渐退出刚轮齿间的,啮合过程中齿面接触,滑移速度小,且无突然变化。
7.齿侧间隙可以调整。
谐波齿轮传动在啮合中,柔轮和刚轮齿之间主要取决于波发生器外形的最大尺寸,及两齿轮的齿形尺寸,因此可以使传动的回差很小,某些情况甚至可以是零侧间隙。
8.传动效率高。
与相同速比的其它传动相比,谐波传动由于运动部件数量少,而且啮合齿面的速度很低,因此效率很高,随速比的不同(u=60-250),效率约在65—96%左右(谐波复波传动效率较低),齿面的磨损很小。
9.同轴性好。
谐波齿轮减速器的高速轴、低速轴位于同一轴线上。
10.可实现向密闭空间传递运动及动力。
采用密封柔轮谐波传动减速装置,可以驱动工作在高真空、有腐蚀性及其它有害介质空间的机构,谐波传动这一独特优点是其它传动机构难于达到的。
11.可实现高增速运动。
谐波传动柔轮应力与位移二维简化分析

【 上接第1 2 】 2页
此 同时 ,齿 顶 及 齿 面 方 向应 力 值 较 小 。 由于 有 柔 性 轴 承 模 型 在 长 轴 方 向为 单 个 滚 动 体 接 触 ,受力
不 均 匀 ,所 以 齿 根 最 大 应 力 值 稍 大 ,为 1 3 a 2 Mp ; 无 柔 性 轴 承 模 型 凸轮 与 柔 轮 接 触 ,受 力 均 匀 ,齿 根 最大 应 力值 稍 小 ,为 13 a 总体 而 言 ,两组 1Mp 。 模型 柔轮 齿根 应力 相差 不大 ,数值 近似 相等 。
摘 要 :利用有限元软件A A U 分别建立 了有柔性轴承以及无柔性轴承的谐波传动平面简化 模型 , BQS 对 装配完成后柔轮应力及径向位移进行了分析。结果表明 ,无柔性轴承的谐波传动模型相 对于有 柔性轴承模型不仅柔轮应力及径向位移分布相同 ,数值近似相等 ,而且计算 效率较高 , 在使用 有限元方法分析柔轮强度时完全可以代替有柔性轴承的谐波传动模型。上述 结果 对谐 波齿 轮传 动有限元建模有一定的指导作用 。 关键词 : 谐波传动 ;AB Q S;桑性轴承 ;应力 ;径向位移 AU
0 引言
谐波齿轮传动 是二十世 纪 5 0年 代 末 和 6 0年 代初 问世 的一种 崭 新传 动 Ⅲ。它 与一般 齿 轮传 动相 比 ,具 有传 动 比 大 、体 积 小 、重 量 轻 、精 度 高 及
噪 声 小 等 优 点 。近 几 十 年 来 ,谐 波 齿 轮 传 动 技 术
E 20 a = 1Gp ,泊松 比 03 . 。
中图分类号 :T 1 24 H .3 3 文献标识码 :A 文章编号 :1 0 - 1 4 2 1 ) ( -0 1 0 9 0 ( 0 2 1 上) 1 - 3 0 3 0 2
全国自考机电一体化系统设计-试卷4_真题(含答案与解析)-交互

全国自考(机电一体化系统设计)-试卷4(总分58, 做题时间90分钟)1. 单项选择题1.输入和输出满足线性叠加原理的系统称为【】SSS_SINGLE_SELA 线性系统B 非线性系统C 时变系统D 随机系统分值: 2答案:A2.齿轮系传动比最佳分配条件为【】SSS_SINGLE_SELABCD分值: 2答案:A3.某光栅的光栅条纹的夹角为0.01rad,栅距为0.1mm,则莫尔条纹的宽度为【】SSS_SINGLE_SELA 2.5mmB 5mmC 7.5mmD 10mm分值: 2答案:D4.码盘式转速传感器采用增量式编码器直接连接到转轴上,产生一系列脉冲,从而得到【】SSS_SINGLE_SELA 电压信号B 数字式电流信号C 电流信号D 数字式速度信号分值: 2答案:D5.交流感应电动机的转子结构的种类有【】SSS_SINGLE_SELA 1利B 2种C 3利D 4种分值: 2答案:B6.超声波电动机可简记为【】SSS_SINGLE_SELA PWMB FMSC CAMD USM分值: 2答案:D解析:USM是超声波电动机的简写,FMS是柔性制造系统的简写,CAM是计算机辅助制造的简写,PWM是脉冲宽度调制的简写。
7.步进电动机控制系统是一种【】SSS_SINGLE_SELA 开环控制系统B 闭环控制系统C 半闭环控制系统D 前馈控制系统分值: 2答案:A8.三相反应式步进电动机转子有12个齿,双三拍通电时,其步距角为【】SSS_SINGLE_SELA 2.5°B 5°C 10°D 20°分值: 2答案:C解析:考查步距角计算公式为θ=,双三拍通电时,通电方式系数为s=。
1,即θs9.利用DDA法实现直线插补。
采用常速度分布实现直线运动控制指令时,步进电动机的参考脉冲指令是【】SSS_SINGLE_SELA 位置寄存器的溢出脉泔B 速度寄存器的溢出脉冲C 时钟信号D 加速度寄存器的溢出脉冲分值: 2答案:A10.Y的布尔代数方程为:Y=()C,则当A发生时,Y 【】SSS_SINGLE_SELA 肯定发生B 肯定不发生C 取决于CD 可能发生也可能不发生分值: 2答案:D解析:由题方程知,当A发生时,B不发生且C发生时,Y才发生。
谐波减速器 ppt
-
17
1、公式推导(2):
ig Hb n nb g n nH Hn 0 g n n H H igH 1Z Zb g
igH 1Z Zb g
ZgZbZbZg
Zg
Zg
实际上,运动是从波发生器输入的,减速器的传
动比为:
iHgig1H
Zg Zb Zg
-
18
五、柔轮、波发生器 常见的结构型式
-
19
1.柔轮常见的结构型式:
波发生器主动, 单级减速,结构 简单,传动比范 围较大,效率较 高,应用极广, i=75~500。
-
iHGR
ZR ZG ZR
13
2.柔轮固定—刚轮输出:
波发生器主动, 单级减速,结构 简单,传动比范 围较大,效率较 高,可用于中小 型减速器, i=75~500。
iHRG
ZG ZG ZR
-
14
3.波发生器固定—刚轮输出:
生变形,使两轮轮齿在进行啮入、啮合、
啮出、脱开的过程中不断改变各自的工作
状态,产生了所谓的错齿运动,从而实现
了主动波发生器与柔轮的运动传递。
-
9
工作原理图例:
波发生器的旋转方 向与柔轮的转动方 向相反。
-
10
柔轮与刚轮齿面的啮合过程:
-
11
三、单级谐波齿轮常见的 传动形式和应用
-
12
1.刚轮固定—柔轮输出:
柔轮的结构型式与谐波传动的结构类型选择 有关。柔轮和输出轴的联结方式直接影响谐 波传动的稳定性和工作性能。
筒形底端联接式:
结构简单,联接方便,制造容易,刚性较大,应用较 普遍。
筒形花键联接式:
轴向尺寸较小,扭转刚性好,传动精度较高,联接方 便,承载能力较大。
谐波的介绍PPT课件
3、谐波的特征
8 )功率 在一个平衡的三相非线性负载上施加线电压U,流过的线电流 为I,这时负载消耗的功率的方程式要复杂得多,因为U 和I 中都含 有谐波。但是,仍然可以简单地表示为:
P S
(λ= 功率因数)
对基波电压U1 和基波电流I1,它们之间的相移为1 :
P基波视在 S1 3U1I1
P基波有功 P1 S1cos1 P基波无功 Q1 S1sin1
9
第9页/共29页
3、谐波的特征 5) 峰值因数(Crest Factor) 峰值因数(Fc)定义为峰值与有效值的比率,用来表示信号(电
流或电压)形状的特征。
下面是不同负载的典型峰值因数: 线性负载: Fc =SQRT(2)= 1.414; 计算机主机: Fc = 2~2.5; 微机: Fc = 2 ~3。
其它负载造成的电流失真,主要是因为它们的工作原理,并且 也会产生谐波。例如荧光灯、放电灯、电焊机和其它带有磁饱和铁 芯的装置。
2
第2页/共29页
2、谐波的起源
供电电源为负载提供的是50Hz 的正弦波电压,但负载所需要的、 由电源提供的电流波形却取决于负载的类型。
1、线性负载 负载吸收的电流是与电压频率相同的正弦波电流,电流与电压
之间可能存在着相位差(角度为);欧姆定律定义了线性负载的电压与 电流的比值为一个常系数——负载的阻抗,电流和电压之间的关系 是线性的。
例如:标准的白炽灯泡、电加热器、电阻负载、变压器,等 等。
这类负载中没有任何有源电子器件,只有电阻(R)、电感(L) 和 电容(C)。
3
第3页/共29页
2、谐波的起源 供电电源为负载提供的是50Hz 的正弦波电压,但负1kVA
其中P1 和S1 分别为基波的有功功率和视在功率。
机械设计基础第27讲 棘轮机构

B
个齿距,且工作时有响声。
❖外啮合棘轮机构:
• 棘齿做在棘轮的外缘; 单动式棘轮机构: 单动棘轮齿一般做成锯齿形; 双动式棘轮机构: 直头双动式棘爪棘轮机构 钩头双动式棘爪棘轮机构 可变向棘轮机构:
❖内啮合棘轮机构(图13-7)
棘齿做在棘轮的内缘
2、摩擦式棘轮机构
• 结构:外套筒1、内套筒3 及之间装有受压缩弹簧作
1、齿式棘轮机构
• 结构特点:由带棘齿的棘轮、主 动棘爪、止回棘爪、机架组成;
• 工作原理:摆杆1左右摆动,当 摆杆左摆时,棘爪4插入棘轮3的 齿内推动棘轮转过某一角度。当
A 4
1 n
摆杆右摆时,棘爪4滑过棘轮3,
而棘轮静止不动,往复循环。
n
O
• 止动爪5——防止棘轮反转这种有 3
2
5
齿的棘轮其进程的变化最少是1
应用:
图13-22 少齿差减速器
二、摆线针轮行星传动机构
工作原理:
iHV
nH nv
z2 z1 z2
z2
传动比大、结构紧凑、 体积小、重量轻及效 率高的优点.
如图13-23
三、谐波齿轮传动机构
工作原理:
iH2
nH n2
(z1
1 z2)/ z2
z2 z1 z2
特点:
21
2 2
2
Z
(为使槽轮2在开始和终止运动的瞬时角速度为零,以避免圆 销与槽发生撞击,圆销进入、退出径向槽的瞬间使O1A⊥O2A)
21 Z 2 1 1 2 2Z 2 Z
1 1 1
2Z 2
谐波齿轮介绍
d f 2 d f 2 d a2 2.3m d f 2 d a2 2.05m
0
当 hn
1.6m
时,与
* 0
1.1 ~
0.85 相对应
刚轮的齿顶圆和齿根圆 直径是根据在齿轮啮入 深度处保证有必要的径 向间隙以及消除过度曲 线干涉的条件下确定的
采用 0 30 压力角
的柔轮之节圆压力角应为19 ~ 31
inv M 2
inv 0
2 z2
dp db2
2z2
在远上的渐
开线压力角
测量柔轮时 用的量柱测
量距
M1
M
1
M1
d1
cos 0 cos M1
d1
cos 0 cos M 1
cos
d p (偶数齿)
90 z1
d p (奇数齿)
inv20 0.014904 inv30 0.053751
测量刚轮时 用的量柱测
代号
计算公式
0 20
0 30
备注
齿顶高系数 ha* ha* 1.0
ha* 0.8
顶隙系数
c* c* 0.25
c* 0.2
柔轮变位 系数
x1 对于柔性轴承已按标准选定的,
x1
0.5(Db
2 )
r1 m
(ha*
c* )m
x1 2.15 0.009z1
x1 0.15
Db --柔性轴承的外径;
柔轮基圆 直径
db1 db1 mz1 cos 0
柔轮分度圆 d1 d1 mz1
直径
柔轮分度圆 s1 s1 0.5m 2x1m tan 0
齿厚
时,柔轮中应力有所减 小
刚轮基圆 直径
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
设计:潘存云教授
按ESC返回, 正转↓,反转↑ 连续动画:按键不松手,点动:单击键
双波谐波传动
设计:潘存云教授
版权所有作者:潘存云教授。