CAN总线/RS232智能电平转换器的设计
CAN_RS232接口卡的设计与实现
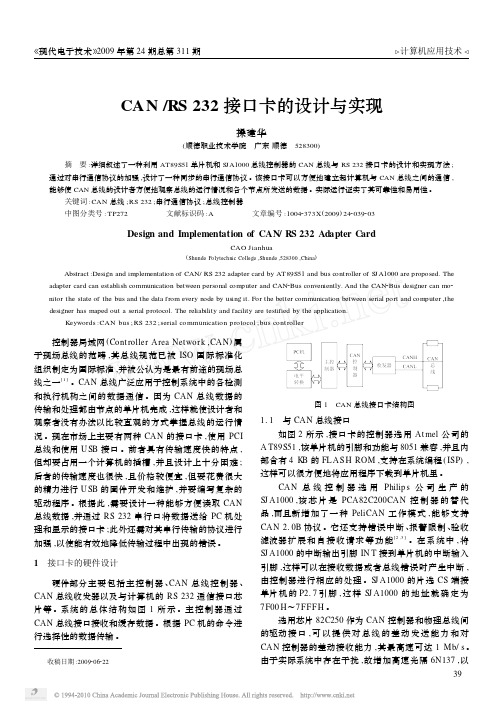
CAN /RS 232接口卡的设计与实现操建华(顺德职业技术学院 广东顺德 528300)摘 要:详细叙述了一种利用AT89S51单片机和S JA1000总线控制器的CAN 总线与RS 232接口卡的设计和实现方法;通过对串行通信协议的加强,设计了一种同步的串行通信协议。
该接口卡可以方便地建立起计算机与CAN 总线之间的通信,能够使CAN 总线的设计者方便地观察总线的运行情况和各个节点所发送的数据。
实际运行证实了其可靠性和易用性。
关键词:CAN 总线;RS 232;串行通信协议;总线控制器中图分类号:TP272 文献标识码:A 文章编号:10042373X (2009)242039203Design and Implementation of CAN/RS 232Adapter C ardCAO Jianhua(Shunde Polytechnic College ,Shunde ,528300,China )Abstract :Design and implementation of CAN/RS 232adapter card by AT89S51and bus controller of S J A1000are proposed.The adapter card can establish communication between personal computer and CAN 2Bus conveniently.And the CAN 2Bus designer can mo 2nitor the state of the bus and the data from every node by using it.For the better communication between serial port and computer ,the designer has maped out a serial protocol.The reliability and facility are testified by the application.K eywords :CAN bus ;RS 232;serial communication protocol ;bus controller收稿日期:2009206222 控制器局域网(Cont roller Area Network ,CAN )属于现场总线的范畴,其总线规范已被ISO 国际标准化组织制定为国际标准,并被公认为是最有前途的现场总线之一[1]。
RS_232与CAN总线协议转换单元设计_陈敬谦
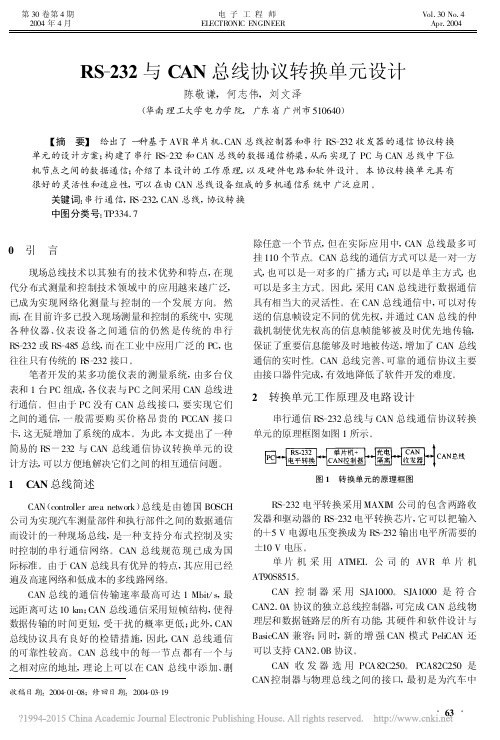
RS -232与CAN 总线协议转换单元设计陈敬谦,何志伟,刘文泽(华南理工大学电力学院,广东省广州市510640)【摘 要】 给出了一种基于AVR 单片机、CAN 总线控制器和串行RS -232收发器的通信协议转换单元的设计方案;构建了串行RS -232和CAN 总线的数据通信桥梁,从而实现了PC 与CAN 总线中下位机节点之间的数据通信;介绍了本设计的工作原理,以及硬件电路和软件设计。
本协议转换单元具有很好的灵活性和适应性,可以在由C AN 总线设备组成的多机通信系统中广泛应用。
关键词:串行通信,R S -232,CAN 总线,协议转换中图分类号:TP334.7收稿日期:2004-01-08;修回日期:2004-03-190 引 言现场总线技术以其独有的技术优势和特点,在现代分布式测量和控制技术领域中的应用越来越广泛,已成为实现网络化测量与控制的一个发展方向。
然而,在目前许多已投入现场测量和控制的系统中,实现各种仪器、仪表设备之间通信的仍然是传统的串行RS -232或RS -485总线,而在工业中应用广泛的PC ,也往往只有传统的R S -232接口。
笔者开发的某多功能仪表的测量系统,由多台仪表和1台PC 组成,各仪表与PC 之间采用CAN 总线进行通信。
但由于PC 没有CAN 总线接口,要实现它们之间的通信,一般需要购买价格昂贵的PCCAN 接口卡,这无疑增加了系统的成本。
为此,本文提出了一种简易的RS -232与CAN 总线通信协议转换单元的设计方法,可以方便地解决它们之间的相互通信问题。
1 C AN 总线简述CAN (controller area network )总线是由德国BOSCH 公司为实现汽车测量部件和执行部件之间的数据通信而设计的一种现场总线,是一种支持分布式控制及实时控制的串行通信网络。
CAN 总线规范现已成为国际标准。
由于C AN 总线具有优异的特点,其应用已经遍及高速网络和低成本的多线路网络。
RS232-CAN协议转换器的设计及应用

b t e 2 2 t e we n RS 3 o CAN,a d i i fg e tsg i c n e i h n tume twi 2 2 it ra e n t so r a i nf a c n t e isr i n t RS 3 n e f c . h
Ke r s o t l rae e ok ( A ;po cl o vri ;c e c l xgnd m n ( O ywod :cnr l rant r C N) rt o cn e o oe w o s n h mi ye 局部 网 C N ( o t l r raN tok 总线 是 一种有 效支 持 分布式 控 制或 实时 控制 的 串行通 A C nr l e ew r ) oe A
中 图 分 类 号 :T 2 4 2 P 7 . 文献 标 识 码 : A
De in a d Ap lc t n o n etrb t e 2 2 a d CAN sg n p iai fCo v re ewe n RS 3 n o
D N u n — ,LU G a gd , H U Z i i E G G a gf u I u n —a Z O h—a jn
摘要 : 为解决 R 2 2接 口设 备传输距离短 、不便 于组 网等问题 ,根据 C N ( ot l r raN tok S3 A C nr l e e r )总线的传 oe A w 输距 离远 、抗 干扰 能力 强 、便 于组 网等特 点 ,设计 了基 于 C N总线 技 术 、串行 通 信 技术 和单 片 机 技术 的 A
( ol eo s u nai n l t clE gn eig i n U ie i ,C a g h n 1 0 6 , hn ) C l g fI t me tt n a d E e r a n ier ,J i nv r t e nr o ci n l s y h n c u 3 0 1 C ia
RS232_CAN智能协议转换器及其通信网络

第28卷,第3期 中国铁道科学Vo l 28No 32007年5月 CH INA RAILWAY SCIEN CEM ay,2007文章编号:1001 4632(2007)03 0134 06 成果简报RS232/CAN 智能协议转换器及其通信网络赵志军1,王建英2(1.中国传媒大学信息工程学院,北京 100024; 2.铁道科学研究院通信信号研究所,北京 100081) 摘 要:为研制RS232/CAN 智能协议转换器,根据技术要求,确定其硬件系统主要由RS232接口、CA N 协议控制器和CAN 总线收发器等组成,软件系统主要由参数设置子程序、RS232串口/CA N 转换子程序、CRC 校验子程序等组成。
关键技术包括:在CA N 控制器软件初始化过程中对系统中断的控制;采用硬件流控制实现数据传输过程的控制。
将2个RS232/CAN 智能转换器通过双绞线连接起来,实现2个设备之间的R S232点对点远程通信。
在各设备处安装RS232/CA N 智能转换器,通过双绞线连接,并在端点处安装匹配电阻即可组成RS232/CA N 通信网络。
在调度集中车站智能自律分机系统中,采用RS232/CA N 智能协议转换器构建通信网络,既可充分利用原来的软硬件系统,又可提高系统的效率,缩短开发周期。
关键词:智能协议转换器;RS232接口;R S232/CA N 转换;控制器局域网络(CA N) 中图分类号:T N 919 2;U 285 41 文献标识码:B收稿日期:2006 06 13;修订日期:2007 03 15作者简介:赵志军(1970 ),女,河北元氏人,副教授,博士研究生。
RS232通信距离短,只能进行点到点通信,不能直接组建多点通信网络。
为了延长RS232的通信距离,并将RS232节点组成通信网络,目前广泛使用RS232/RS485信号转换器。
但是随着控制网络规模的扩大,数据通信量的增多,对数据的实时性、可靠性以及故障敏感性等的要求进一步提高,基于RS485总线的通信方式已不能很好地满足应用的要求[1 3]。
基于AVR处理器的RS232-CAN通信转换模块的设计
基于A VR处理器的RS232-CAN通信转换模块的设计【摘要】简要介绍了CAN总线的原理,提出了以内置CAN控制器的微处理器AT90CAN128为核心的,以TJA1050为CAN收发器的通信转换模块硬件电路的设计,并结合软件设计进行数据的收发,实现了RS232与CAN总线的互相通信。
【关键词】CAN总线;RS232串行口;AT90CAN128;TJA10501.引言目前在工业测控设备和系统中有很多是采用RS232接口,但是由于RS232通信距离较短(根据EAT/TAI-232标准,仅为15m),传输速率低,接口容易损坏,而且只能进行点到点通信,难以组成多点通信网络[1]。
为了延长RS232的通信距离,并将RS232节点组成通信网络,由于CAN总线在组网和通信上的能力能完全满足这些要求,本文介绍一种可以将RS232转换成CAN总线的设计方法,以更好地解决这些问题。
2.CAN总线简介CAN全称为Controller Area Net,即控制器局域网,是一种有效的支持分布式控制或实时控制的串行通信网络。
CAN是德国Bosch公司为汽车的检测、控制系统而设计的,非常适合工业过程监控设备互联。
CAN控制器工作于多主站方式,网络中的各节点可分为不同的优先级,满足不同的实施要求。
采用非破坏性总线仲裁技术,有效避免了总线冲突。
CAN 的最远通信距离可达到10Km,最高通信速度可达1Mbps。
CAN协议废除了传统的站地址编码,可使网络内的节点个数在理论上不受限制,通信实时性强,提高系统的可靠性和系统的灵活性[2]。
CAN采用短帧结构,缩短了传输时间,因而受干扰的概率低,重新发送时间短。
CAN每帧信息都有CRC码校验及其他检错措施,保证了数据的出错率极低。
CAN的通讯介质可以为双绞线、同轴电缆或光纤,选择灵活,成本低。
CAN 节点在错误严重的情况下具有自动关闭功能,以使总线上其它节点的操作不受影响。
CAN总线通过两个输出端CANH和CANL与物理总线相连,不会出现损坏某些节点的现象[3]。
片机控制的CAN总线与RS-232转换器电路设计
1.概述CAN(Controller Area Network)总线是德国BOSCH公司为解决现代汽车中众多控制与测试之间的数据交换开发的一种串行数据通信协议,是一种多主方式的串行通信总线。
CAN总线是一种开放式、数字化、多点通信的控制系统局域网,具有通信速率高、传输时间短、传输距离远、纠错能力强、控制简单、扩展能力强以及性价比高等特点,是目前国际上应用最广泛的现场总线之一。
基于CAN总线的CAN控制器具有完成CAN总线通信协议所要求的全部必要功能,因此CAN控制器与其它微处理器的接口成为设计CAN总线系统的首要工作。
实际中很多设备带有RS-232接口,为了方便具有RS-232接口的设备与CAN总线的数据通信,本文完成了基于单片机控制的CAN总线与RS-232转换器电路设计和软件设计,实现了CAN总线数据与RS-232接口设备的数据传输。
2.基于单片机控制的CAN总线与RS-232转换器电路设计CAN总线与RS-232转换器电路包括:主控制模块、RS-232接口转换电路和CAN控制模块3个主要部分。
主控制模块的功能是处理CAN总线以及RS-232接口的数据通信和控制,本设计应用AT89C51完成对转换器各个接口的控制,实现CAN总线和RS-232接口两种协议数据帧的转换,使用带有SPI总线接口的X25045实现硬件看门狗功能。
主控模块电路如图1所示。
RS-232接口电路由MAX232芯片构成,实现将单片机串口的TTL电平与RS-232电平的相互转换,完成RS-232接口信息的输入输出传输。
CAN控制器模块,主要完成CAN协议的物理层和数据链路层协议的实现。
其中物理接口采用PCA82C250芯片实现物理层的电平转换和传输。
CAN控制器使用SJA1000芯片,完成数据链路层功能,实现CAN总线信息的输入输出传输。
AT89C51是CAN总线与RS-232转换器的控制器,提供以下标准功能:4k字节Flash闪速存储器,1000次可擦写周期,三级加密程序存储器,128字节内部RAM,32个I/O口线,两个16位定时/计数器,一个5向量中断结构,一个全双工串行通信口,片内振荡器及时钟电路。
CAN与RS232转换节点的设计与实现
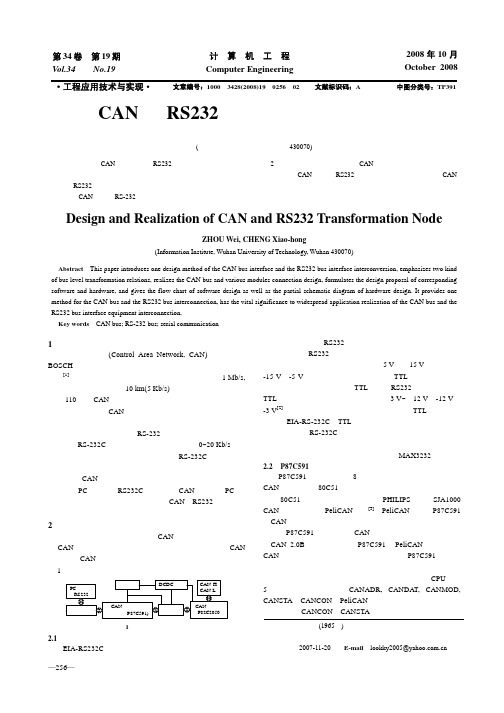
2008年10月October 2008—256— 计 算 机 工 程Computer Engineering 第34 第19期Vol 卷.34 No.19·工程应用技术与实现·文章编号:1000—3428(2008)19—0256—02文献标识码:A中图分类号:TP391CAN 与RS232转换节点的设计与实现周 伟,程晓红(武汉理工大学信息学院,武汉 430070)摘 要:介绍将CAN 总线接口与RS232总线接口相互转换的设计方法和2种总线电平转换关系,实现CAN 总线与各模块的接口设计,制定了相应的软硬件设计方案,并给出软件设计流程图以及部分硬件设计原理图。
为CAN 总线与RS232总线互联提供了一种方法,对CAN 总线与RS232总线接口设备的互联和广泛应用的实现具有重要意义。
关键词:CAN 总线;RS-232总线;串行通信Design and Realization of CAN and RS232 Transformation NodeZHOU Wei, CHENG Xiao-hong(Information Institute, Wuhan University of Technology, Wuhan 430070)【Abstract 】This paper introduces one design method of the CAN bus interface and the RS232 bus interface interconversion, emphasizes two kind of bus level transformation relations, realizes the CAN bus and various modules connection design, formulates the design proposal of corresponding software and hardware, and gives the flow chart of software design as well as the partial schematic diagram of hardware design. It provides one method for the CAN bus and the RS232 bus interconnection, has the vital significance to widespread application realization of the CAN bus and the RS232 bus interface equipment interconnection.【Key words 】CAN bus; RS-232 bus; serial communication1 概述控制局域网络(Control Area Network, CAN)最早由德国BOSCH 公司推出,用于汽车内部测量与执行部件之间的数据通信[1]。
一种新型CAN_RS232协议转换器的设计与实现
焦建军
一种新型 CAN-RS232 协议转换器的设计与实现
焦建军,蔡慧林
( 兰州交通大学 机电工程学院,兰州 730070)
摘 要: 利用 CAN 总线对仅有 RS232 接口的数控机床构建的 DNC 系统,当集成的 CNC 系统种类
较多时,将使 DNC 主机管理软件变得复杂,通用性降低; 另外 DNC 主机向不同数控机床传送 NC 程
在开发与生 产 高 性 能 数 控 机 床 的 同 时,充 分 发 挥 现有 装 备 的 性 能 与 效 率。 ( distributed numerical control,DNC) 是实现网络化制造与集成制造的有 效途径,是实现 CAD / CAM 一体化技术的纽带,是 现代制造车间实现 CIMS 信息集成的基础。由于 CAN ( controller area network,CAN) 总线在网络通 信中具有一系列优势[3],是一种比 较 理 想 的 DNC 通信方式[4]。在利用 CAN 构建的 DNC 系统中,有 两个问题 需 要 进 一 步 加 以 解 决。首 先,如 果 数 控 机床的存储空间小,DNC 服务 器 每 次 能 发 送 的 数
收稿日期: 2012-09-04 基金项目: 兰州市科技专项重点项目( 20750) 资助 作者简介: 焦建军( 1984 - ) ,硕士研究生,研究方向为网络通信和嵌
入式系统,jiaojianjun99 @ 126. com; 蔡 慧 林 ( 1965 - ) ,教 授,博士,caihl@ mail. lzjtu. cn
序中需要切换,以小数据包传送 NC 程序会降低传输效率,降低 DNC 系统的实时性。本文提出的
新型 CAN-RS232 协议转换器可嵌入不同通信协议、具有大存储空间、并能对存储空间实现智能管
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAN总线/RS232智能电平转换器的设计
1 引言CAN,全称为Controller Area Network,即控制器局域网,是一种国际标准的,高性价的现场总线,在自动控制领域具有重要作用。
CAN 是一种多主方式的串行通讯总线,具有较高的实时性能,因此,广泛应用于汽车工业、航空工业、工业控制、安全防护等领域。
由于PC 机无CAN 接口,因此,PC 机与智能节点构成CAN 总线系统可采用RS232/CAN、并口
/CAN、USB/CAN、ISA 卡/CAN 以及PCI 卡/CAN 方式接入。
而采用
RS232/CAN 接入时,需采用CAN/RS232 接口标准转换。
针对这一问题,提出了CAN/RS232 智能电平转换器设计方案,以SJAl000 作为独立CAN 控制器,完成CAN 通信协议。
并在SJAl000 与驱动器之间连接高速光耦,从而实
现总线各点间的电气隔离。
2 硬件电路设计CAN/RS232 智能电平转换器硬件电路主要由微处理器AT89C52、独立CAN 通讯控制器SJAl000、CAN 总线驱动器82C250、高速光电耦合器6N136、TTL 电平与RS232 电平转换器
ICL232、LED 数码管显示电路以及为SJAl000 提供初始地址的拨码电路组成,其结构框图如图1 所示。
3 CAN 控制器SJAlOOOSJAl000 是一款独立CAN 控制器,应用于移动目标和工业局域区域网控制领域。
该器件是Philips 公司
CAN 控制器PCA82C200 的替代产品。
SJAl000 具有两种工作模式,本设计采用PeliCAN 工作模式。
3.1 SJAl000 与AT89C52 的接口设计SJAl000 与AT89C52 的接口电路如图2 所示。
AT89C52 负责sJAl000 的初始化,控制SJAl000 来实现数据的接收和发送等通讯任务。
SJAl000 的ADO~AD7 连接至AT89C52 的P0 端口,CS 连接至AT89C52 的P3.4(AT89C52 的定时器T0 不起作用)。
当P3.4 为0 时,AT89C52 选中SJAl000,并通过访问外部RAM 低地址区实现P0 端口的读/写操作,从而对SJAl000 相应寄存器执行读/写操。