matlab仿真实例
matlab电气仿真实例
matlab电气仿真实例MATLAB电气仿真实例在本文中,我们将探讨MATLAB在电气仿真领域中的应用。
通过一个具体的实例,我们将展示如何使用MATLAB进行电气系统的建模、分析和仿真。
1. 引言电气系统的建模和仿真对于设计和分析电路、控制系统、电力系统等具有重要意义。
传统的电气仿真方法需要手动编写大量的数学方程,并且计算过程繁琐。
而MATLAB提供了一种快速、简便且高效的方式来实现电气仿真。
2. 问题描述假设我们有一个简化的直流电机系统。
系统包括一个直流电机、一个电阻和一个电压源。
我们想要分析在给定电压下电机的转速以及电机周围的电压和电流的变化情况。
3. 建立电气系统模型首先,我们需要建立电气系统的数学模型。
在本例中,我们使用电路定律(基尔霍夫定律和欧姆定律)来建立模型。
根据基尔霍夫定律,我们可以得到电路的电流方程:I = \frac{V}{R}其中,I是电流,V是电压,R是电阻。
根据欧姆定律,我们可以得到电机的速度与电压之间的关系:\omega = \frac{V}{K}其中,ω是电机的角速度,V是电压,K是电机的转速常数。
基于这些方程,我们可以进一步建立系统的状态空间模型:\begin{bmatrix} \dot{\omega} \\ \dot{I} \end{bmatrix} =\begin{bmatrix} 0 & \frac{-1}{K} \\ 0 & \frac{-1}{R}\end{bmatrix} \begin{bmatrix} \omega \\ I \end{bmatrix} +\begin{bmatrix} \frac{1}{K} \\ 0 \end{bmatrix} V其中,\dot{\omega}和\dot{I}分别表示电机速度和电流的导数。
4. MATLAB仿真现在我们可以使用MATLAB进行仿真了。
首先,我们需要定义系统的参数和初始条件。
例如,我们可以选择电压源电压为12V,电阻为1Ω,转速常数为10。
模糊控制的Matlab仿真实例
其他例子
模型Shower.mdl―淋浴温度调节模糊控制系统仿真; 模型slcp.mdl―单级小车倒摆模糊控制系统仿真; 模型 slcp1.mdl―变长度倒摆小车模糊控制系统仿
真; 模型 slcpp1.mdl—定长、变长二倒摆模糊控制系
统仿真; 模型slbb.mdl―球棒模糊控制系统仿真; 模型sltbu.mdl―卡车智能模糊控制倒车系统仿真; 模型sltank2.mdl ― 用子系统封装的水箱控制仿
为简单起见,我们直接利用系统里已经编辑好的 模糊推理系统,在它的基础上进行修改。这里我 们采用与tank . fis中输入输出变量模糊集合完 全相同的集合隶属度函数定义,只是对模糊规则 进行一些改动,来学习模糊工具箱与仿真工具的 结合运用。对于这个问题,根据经验和直觉很显 然可以得到如下的模糊度示 波器
冷水阀子系统
这个仿真模型的输出是用示波器来表示的,如 图所示。通过示波器上的图形我们可以清楚地 看到温度和水流量跟踪目标要求的性能。
水温示波器
水流示波器
水温偏差区间模糊划分及隶属度函数
水流量偏差区间模糊划分及隶属度函数
输出对冷水阀控制策略的模糊化分及隶属度函数
选Edit菜单,选择Rules, 弹出一新界面Rule Editor. 在底部的选择框内,选择相应的 IF…AND…THEN 规则,点击Add rule 键,上部 框内将显示相应的规则。本例中用9条左右的规 则,依次加入。如下图所示:
模糊逻辑工具箱仿真结果
模糊规则浏览器用于显示各条模糊控制规则对 应的输入量和输出量的隶属度函数。通过指定 输入量,可以直接的显示所采用的控制规则, 以及通过模糊推理得到相应输出量的全过程, 以便对模糊规则进行修改和优化。
这样的结果与实际情况还是有些不符。通常顾客都是给15%的 小费,只有服务特别好或特别不好的时候才有改变,也就是说, 希望在图形中间部分的响应平坦些,而在两端(服务好或坏) 有凸起或凹陷。这时服务与小费是分段线性的关系。例如,用 下面 MATLAB 语句绘出的下图的情况。
matlab-SIMULINK仿真实例

二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析)对动平台4:受力分析如图4F24x+F43x=m4*Ac4x (1)F24y+F43y=m4*Ac4y (2)F24y*rc4-F43y*rc4=0 (3)图4动平台4的受力分析对并联杆2:受力分析如图5F12x+F24x=-m2*Ac2x (4)F12y+F24y=-m2*Ac2y (5)F12x*rc2*S2+F12y*rc2*C2-F24x*rc2*S2-F24y*rc2*C2=I2*α2 (6)图5并联杆2的受力分析对直线电机滑块1:受力分析如图6Fm+F12x=m1*r1_dot_dot (7)Fy=F12y (8)图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R1+R2=R3+R4将上述矢量方程分解为x和y方向,并分别对方程两边对时间t求两次导数得:r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12)r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13)三)质心加速度的矢量方程F13x+F43x=-m3*Ac3x (9)F13y+F43y=-m3*Ac3y (10)F43x*r3*C3+F43y*r3*S3= I3*α3 (11)图9质心加速度的矢量示意图矢量关系:Ac3=Rc3_dot_dotAc4=R3_dot_dot+ Rc4_dot_dotAc2=R3_dot_dot+ R4_dot_dot+ Rc2_dot_dot (_dot_dot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm 引入的加速度有:α2,α3,r1_dot_dot ,Ac3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式1010000000000200000010100000000002002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----300000000101000000003000000333300003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅003300001000000000000033000001000000000000330001rc C r S r C ⎛⎫⎪ ⎪⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα••⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
matlab连续时间系统的建模与仿真实例

【标题】Matlab中连续时间系统的建模与仿真实例【正文】1. 概述在工程领域中,连续时间系统的建模与仿真是非常重要的环节。
Matlab作为一款强大的工程计算软件,提供了丰富的工具和功能,可以帮助工程师们高效地完成系统建模与仿真的工作。
本文将以连续时间系统的建模与仿真为主题,通过实例的方式,从简到繁地探讨Matlab中的相关应用。
2. 相关概念解释在开始具体的实例之前,我们先来了解一下什么是连续时间系统的建模与仿真。
连续时间系统是指系统的输入和输出都是连续的,可以用连续函数来描述。
而建模与仿真则是指利用数学模型和计算机软件,对系统进行描述和分析,并用计算机模拟系统的行为。
Matlab提供了Simulink等工具,可以方便地进行连续时间系统的建模与仿真。
3. 实例展示接下来,我们将通过一个简单的实例来演示Matlab中连续时间系统的建模与仿真。
假设我们要建立一个受控物体的连续时间系统模型,并对其进行仿真。
在Matlab中,我们可以首先使用Simulink工具搭建系统模型,包括输入信号、系统传输函数等。
通过设置仿真参数和运行仿真,我们可以得到系统的输出响应,进而进行分析和评估。
4. 实例分析在实例展示中,我们可以逐步扩展系统模型的复杂度,加入更多的控制器、传感器等元素,以更贴近实际工程应用场景。
利用Matlab强大的数据处理和分析功能,可以对仿真结果进行详细的分析和评估,验证系统性能和稳定性。
5. 总结与回顾通过本文的实例演示,我们了解了Matlab中连续时间系统建模与仿真的基本流程和方法。
在工程实践中,合理使用Matlab工具,可以极大地提高系统设计与分析的效率和准确性。
值得注意的是,系统建模与仿真需要结合实际情况进行灵活应用,才能更好地发挥其作用。
6. 个人观点个人认为,Matlab提供的工程计算工具具有很高的实用性和适用性,尤其对于连续时间系统的建模与仿真来说,其优势尤为突出。
希望工程师们能够深入学习和应用Matlab工具,不断提升自己在系统设计与分析领域的能力。
matlab通信仿真实例

matlab通信仿真实例通信仿真在工程领域中具有广泛的应用,MATLAB作为一种强大的数学建模工具,能够帮助工程师进行通信系统的仿真设计和分析。
在本文中,我们将通过一个具体的MATLAB通信仿真实例来展示如何使用MATLAB进行通信系统的建模和仿真。
首先,我们需要定义一个简单的通信系统,假设我们要设计一个基于QPSK调制的数字通信系统。
我们可以按照以下步骤进行仿真实例的设计:1. 生成随机比特序列:首先我们需要生成一组随机的比特序列作为发送端的输入。
我们可以使用MATLAB的randi函数来生成随机的二进制比特序列。
2. QPSK调制:接下来,我们需要将生成的二进制比特序列进行QPSK调制,将比特序列映射到QPSK星座图上的相应点。
我们可以使用MATLAB的qammod 函数来进行QPSK调制。
3. 添加高斯噪声:在通信信道中,往往会存在各种噪声的干扰,为了模拟通信信道的实际情况,我们需要在信号上添加高斯噪声。
我们可以使用MATLAB的awgn函数来添加高斯噪声。
4. QPSK解调:接收端接收到信号后,需要进行QPSK解调,将接收到的信号映射回比特序列。
我们可以使用MATLAB的qamdemod函数来进行QPSK解调。
5. 比特误码率计算:最后,我们可以计算仿真的比特误码率(BER),用来评估通信系统的性能。
我们可以通过比较发送端和接收端的比特序列来计算比特误码率。
通过以上步骤,我们就可以完成一个基于QPSK调制的数字通信系统的MATLAB仿真实例。
在实际的通信系统设计中,我们可以根据具体的需求和系统参数进行更加复杂的仿真设计,例如考虑信道编码、信道估计等因素,以更加准确地评估通信系统的性能。
MATLAB的强大数学建模和仿真功能,为工程师提供了一个非常有用的工具,可以帮助他们设计和分析各种通信系统。
通过不断的实践和学习,工程师可以更加熟练地运用MATLAB进行通信系统的仿真设计,为通信系统的性能优化提供有力的支持。
MATLAB实现通信系统仿真实例
补充内容:模拟调制系统的MATLAB 仿真1。
抽样定理为了用实验的手段对连续信号分析,需要先对信号进行抽样(时间上的离散化),把连续数据转变为离散数据分析。
抽样(时间离散化)是模拟信号数字化的第一步.Nyquist 抽样定律:要无失真地恢复出抽样前的信号,要求抽样频率要大于等于两倍基带信号带宽.抽样定理建立了模拟信号和离散信号之间的关系,在Matlab 中对模拟信号的实验仿真都是通过先抽样,转变成离散信号,然后用该离散信号近似替代原来的模拟信号进行分析的。
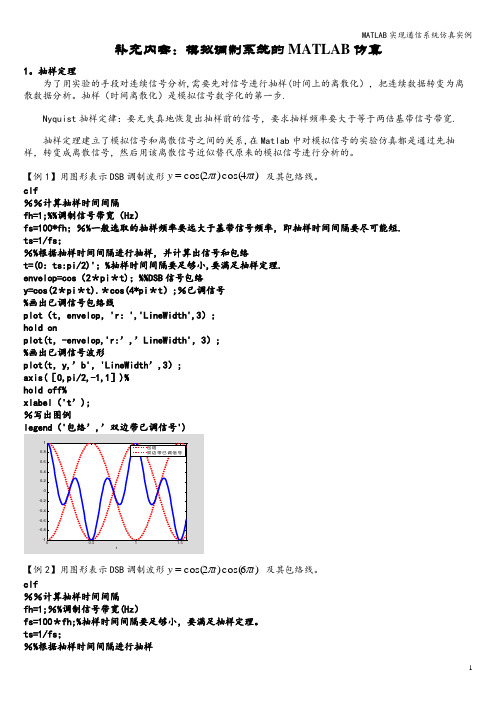
【例1】用图形表示DSB 调制波形)4cos()2cos(t t y ππ= 及其包络线。
clf%%计算抽样时间间隔fh=1;%%调制信号带宽(Hz )fs=100*fh ;%%一般选取的抽样频率要远大于基带信号频率,即抽样时间间隔要尽可能短. ts=1/fs ;%%根据抽样时间间隔进行抽样,并计算出信号和包络t=(0:ts:pi/2)';%抽样时间间隔要足够小,要满足抽样定理.envelop=cos (2*pi *t);%%DSB 信号包络y=cos(2*pi *t).*cos(4*pi *t );%已调信号%画出已调信号包络线plot (t ,envelop ,'r :','LineWidth',3);hold onplot(t ,-envelop,'r:’,’LineWidth',3);%画出已调信号波形plot(t ,y,’b','LineWidth ’,3);axis([0,pi/2,-1,1])%hold off%xlabel ('t ’);%写出图例【例2】用图形表示DSB 调制波形)6cos()2cos(t t y ππ= 及其包络线。
clf%%计算抽样时间间隔fh=1;%%调制信号带宽(Hz )fs=100*fh;%抽样时间间隔要足够小,要满足抽样定理。
基于matlab的车辆工程仿真实例 -回复
基于matlab的车辆工程仿真实例-回复一个基于MATLAB的车辆工程仿真实例是车辆悬挂系统的分析与优化。
在汽车设计中,悬挂系统起着至关重要的作用,影响着车辆的舒适性、稳定性和操控性。
使用MATLAB可以通过建立车辆的动力学模型,对悬挂系统进行仿真分析和优化。
以下是一个可能的仿真实例步骤:1. 建立车辆的动力学模型:使用MATLAB 建立车辆的多体动力学模型,包括车体、车轮、悬挂系统等。
模型可以考虑车辆的质量分布、悬挂系统的刚度和阻尼等参数。
2. 仿真悬挂系统的响应:在建立好动力学模型后,可以通过输入不同的激励,如车速、道路条件等,模拟悬挂系统的动态响应。
通过仿真可以了解车辆在不同工况下的悬挂系统行为,如车身姿态、轮胎力等。
3. 分析悬挂系统参数的影响:在模拟悬挂系统的响应之后,可以通过改变悬挂系统的参数,如刚度和阻尼,来分析这些参数对悬挂系统响应的影响。
通过分析可以确定最优的悬挂系统参数,以满足特定的需求,如舒适性、稳定性等。
4. 优化悬挂系统设计:基于分析结果,可以对悬挂系统的设计进行优化。
通过MATLAB的优化工具箱,可以使用不同的优化算法,如遗传算法、粒子群算法等,来搜索最优的悬挂系统参数组合。
5. 评估优化结果:在优化过程中,评估优化结果的有效性是必要的。
可以使用MATLAB的仿真工具再次运行优化后的悬挂系统模型,并进行性能评估。
性能评估可以包括悬挂系统的响应、车辆稳定性、舒适性等方面。
通过以上步骤,可以使用MATLAB对车辆悬挂系统进行仿真分析和优化,以改善车辆的悬挂系统性能。
这个实例展示了MATLAB 在车辆工程中的应用,可以帮助工程师更好地理解和优化车辆的悬挂系统。
matlab连续时间系统的建模与仿真实例
matlab连续时间系统的建模与仿真实例标题:深入探讨matlab连续时间系统的建模与仿真实例一、引言在工程领域中,连续时间系统的建模与仿真是非常重要的一环。
使用matlab作为工具可以帮助工程师们更好地理解和分析连续时间系统的行为。
本文将深入探讨matlab在连续时间系统建模与仿真中的实际应用,帮助读者更好地掌握这一领域的知识。
二、连续时间系统建模与仿真概述连续时间系统建模与仿真是指利用数学方法和计算机工具对连续时间系统进行抽象化描述和模拟。
在工程实践中,这一过程可以帮助工程师们更好地理解系统的动态特性、分析系统的稳定性和性能,并设计控制策略以满足特定的需求。
1.连续时间系统建模方法连续时间系统建模的方法有很多种,常用的包括微分方程描述、传递函数描述、状态空间描述等。
在matlab中,可以利用Simulink工具箱来快速构建系统的模型,并进行仿真分析。
2.连续时间系统仿真实例下面我们将以一个简单的例子来展示如何使用matlab对连续时间系统进行建模和仿真。
假设有一个带有阻尼的弹簧质量系统,其运动方程可以描述为:\[ m \frac{d^2 x(t)}{dt^2} + c \frac{dx(t)}{dt} + kx(t) = F(t) \]其中,m为质量,c为阻尼系数,k为弹簧常数,F(t)为外部作用力。
我们希望利用matlab对这个系统进行建模,并仿真系统的动态响应。
三、matlab建模与仿真实例1.建立模型在matlab中打开Simulink工具箱,我们可以直接从库中选择弹簧质量阻尼系统的模块进行快速搭建。
将质量、阻尼、弹簧和外部作用力连接起来,即可构建出系统的模型。
2.参数设定设定系统的参数:m=1kg, c=0.5N/m/s, k=2N/m, 外部作用力F(t)=sin(t)。
3.仿真分析设置仿真时间为10s,运行仿真,观察系统的位移-时间和速度-时间响应。
四、实验结果分析通过matlab进行仿真,我们可以得到系统的位移和速度随时间的变化曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
matlab 仿真实例实验五MATLAB 及仿真实验一、控制系统的时域分析(一)稳定性1、系统传递函数为G(s),试判断其稳定性。
程序:>> nu m=[3,2,5,4,6];>> den=[1,3,4,2,7,2];>> sys=tf( nu m,de n);>> figure(1);>> pzmap(sys);>> title(' 零极点图')由图可知:在S 右半平面有极点,因此可知系统是不稳定的。
2、用MATLA 求 出 G(s)=(s A 2+2*s+2)/(s A 4+7*s A 3+5*s+2) 的极点。
程序及结果:>> sys=tf([1,2,2],[1,7,3,5,2]);>> p=pole(sys)矿'.赳 _■ —-6.65530.0327 + 0.8555i0.0327 - 0.8555i-0.4100(二)阶跃响应1、二阶系统G(s)=10/s A2+2*s+101)键入程序,观察并记录单位阶跃响应曲线:程序:>> sys=tf(10,[1,2,10]);>> step(sys);>> title('G(s)=10/sA2+2*s+10 单位阶跃响应曲线')2)计算系统闭环跟、阻尼比、无阻尼振荡频率,并记录程序及结果:>> sys=tf(10,[1,2,10]);>> p=pole(sys)p =-1.0000 + 3.0000i-1.0000 - 3.0000i>> [wn,z]=damp(sys)wn =3.16233.1623z =0.31620.31623)记录实际测取的峰值大小,峰值时间和过渡过程时间,并填表实际值理论值峰值Cmax 1.35s峰值时间tp 1.05s过渡时间+5% 3.54sts +2% 3.18s程序:>> sys=tf(10,[1,2,10]);>> step(sys);>> title('G(s)=10/sA2+2*s+10 单位阶跃响应曲线')4) 修改参数,分别实现 E =1和E =2的响应曲线,并记录E =1: 程序:>> zeta=1;>> wn=sqrtm(1O)wn =3.1623>> sys=tf(10,[1,2*w n*zeta,1O]);>> step(sys)>> title(' E =1 响应曲线')叨F 5 卩吋巧^川尹1 :百 性「詰1 $上产1 ”2匸临-1 UH T 撕"ft 丽吁胡曲 ----------------- 址 tmt [se^J : 1 ———| -------- --s------------------ 剧:dm " : •二 善'Tee.附,吕 伽 IWx 1可知时创寻 阳IF 他址骼| r 42T *(图见下页)E =2:程序:>> zeta=2;>> wn=sqrtm(10)wn =3.1623>> sys=tf(10,[1,2*w n*zeta,10]);>> step(sys)>> title(' E =2 响应曲线')(曲线见下页)5)修改参数,分别实现wn 1=wn/2和wn2=2*wn的响应曲线,并记录wn 1=w0/2:程序:>> wn=sqrtm(10)wn =3.1623>> zeta=2/(wn*2)zeta =0.3162>> wn1=wn/2wn1 =1.5811>> sys=tf((w n1F2,[1,2*w n1*zeta,(w 门1)八2]); >> step(sys)>> title('wn1=wn/2 响应曲线') ( 曲线见下页)£R k"n>*- I-.'Efijjfc二Time frecl:wn 2=2*w n:程序:>> wn=sqrtm(10)wn =3.1623>> zeta=2/(w n*2)zeta =0.3162>> wn 2=2*w nwn2 =6.3246>> sys=tf((w n2F2,[1,2*w n2*zeta,(w 门2)八2]); >> step(sys)>> title('wn2=wn*2 响应曲线')2、作出以下系统的阶跃响应曲线,并与原系统响应曲线进行比较,作出相应实验分析结果。
1) G1(s)=(2*s+10)/(s A 2+2*s+10)程序:>> sys=tf(10,[1,2,10]);>>step(sys)>>hold on>>sys=tf([2,10],[1,2,10]);>>step(sys)A斗百LT->> gtext('\leftarrow G(s)');>> gtext('\leftarrow G1(s)');>> title('G1(s) 与G(s)阶跃响应曲线')(曲线见下页)实验分析结果:G1(s)与原系统响应曲线相比,峰值增加,峰值时间、上升时间、调节时间提前,最终稳定值相等。
2)G2(s)=(s A2+0.5*s+10) /(s A2+2*s+10)程序:>> sys=tf(10,[1,2,10]);step(sys)>> sys=tf(10,[1,2,10]);>>step(sys)>>hold on>>sys=tf([1,0.5,10],[1,2,10]);>>step(sys)>>gtext('\leftarrow G(s)');>>gtext('\leftarrow G2(s)');>> title('G2(s) 与G(s)阶跃响应曲线')( 曲线见下页)实验分析结果:G2(s) 与原系统响应曲线相比,峰值减小,峰值时间增加、上升时间减小、调节时间增加,最终稳定值相等。
3)G3(s)=(s A2+0.5*s)/(s A2+2*s+10)程序:>> sys=tf(10,[1,2,10]);>> step(sys)>> hold on>> sys=tf([1,0.5],[1,2,10]);>> step(sys)>> gtext('\leftarrow G(s)');>> gtext('\leftarrow G3(s)')>> title('G3(s) 与G(s)阶跃响应曲线')(曲线见下页)实验分析结果:G3(s) 与原系统响应曲线相比,峰值减小,峰值时间减小、上升时间减小、调节时间增加,最终稳定值不相等。
* Hi - I . I4)G4(s)=s/(sH+2*s+10)程序:>> sys=tf(10,[1,2,10]); >> gtext('\leftarrow G(s)'); >>step(sys) >>gtext('\leftarrow G4(s)');>>hold on >> title('G4(s) 与G(s)阶跃响应>>sys=tf(1,[1,2,10]); 曲线>>step(sys)实验分析结果:G4(s)与原系统响应曲线相比,峰值减小,峰值时间、上升时间、调节时间都相等,最终稳定值不相等。
W (町I F,.: K F7F F--=:-■存与兰电仝4盘------------ 4~、单位阶跃响应:3C(s)/R(s)=25/(sA2+4*s+25) 求该系统单位阶跃响应曲线,并在所得图形上加网格和标题:程序:>> sys=tf(25,[1,4,25]);>> step(sys)>> grid on;>> title('C(s)/R(s)=25/(s A2+4*s+25) 单位阶跃响应曲线')(图见下页图一)(二)系统动态特性分析用MATLA求二阶系统G(s)=120/(sA2+12*s+120)和G(s)=0.01/(sA2+0.002*s+0.01) 的峰值时间tp上升时间tr调整时间ts超调%。
G(s)=120/(sA2+12*s+120):程序:>> sys=tf(120,[1,12,120]);>> step(sys)>> title('G(s)=120/(s A2+12*s+120) 单位阶跃响应曲线') ( 曲线见下页图二)峰值时间tp=0.34s 上升时间tr=0.158s 调整时间ts=0.532s 超调量(T %=12.8%G(s)=0.01/(sA2+0.002*s+0.01)程序:>> sys=tf(0.01,[1,0.002,0.01]);>>step(sys)>>title('G(s)=0.01/(sA2+0.002*s+0.01) 单位阶跃响应曲线') ( 图见图三)峰值时间tp=32s 上升时间tr=10.3s 调整时间ts=3.9e+003s超调量(T %=96.7%S申F対K ^0tu» 1 T3 6曲甜妣11峯T 123Ail™ 個ec] t J* _ - 一亠-Z I r 轲加^ 3yE5^1lrgTtr6.o? l:j- D 5^2Sy tletli 巧'昌fraiyduH 1■j: F ■- L■-■>■史'車抚hr•粧碉厅曲锚图一5ME島肚-■_ND# TiflM (MCI: 0 /■=™c——*I /\/ ttarai i ■■=■fl I 屯朮If 啊氏打均币-----11jp!L J '■ • i -.ii.fti-ji.---- —j. ------------ ------ _____--- -- ---------------- ------------------- = --- ------------------------------------------------------------------------------------------ =q/ / ■ ifr F 1 ■ 1 ■! ! 1 /f_事 , _, j ■ _______ ■ E . . . __________________Il 1 IM | |l 8 I rl^l 1 ■iPt-se -3np±ud& I 97 mtrahaol CM 967 出 ir^ttec) 32 ■<sLc O1 J :3nC-C-C01 Z1[V 心0昭已厂=:.-■ 5中I -rpiiv-aiuei i 咖: "►rrb-r i :□-;、 图三。