自动控制原理(二)
《自动控制原理》实验2(线性系统时域响应分析)
实验二 线性系统时域响应分析一、实验目的1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。
2.通过响应曲线观测特征参量ζ和n ω对二阶系统性能的影响。
二、基础知识及MATLAB 函数(一)基础知识时域分析法直接在时间域中对系统进行分析,可以提供系统时间响应的全部信息,具有直观、准确的特点。
为了研究控制系统的时域特性,经常采用瞬态响应(如阶跃响应、脉冲响应和斜坡响应)。
本次实验从分析系统的性能指标出发,给出了在MATLAB 环境下获取系统时域响应和分析系统的动态性能和稳态性能的方法。
用MATLAB 求系统的瞬态响应时,将传递函数的分子、分母多项式的系数分别以s 的降幂排列写为两个数组num 、den 。
由于控制系统分子的阶次m 一般小于其分母的阶次n ,所以num 中的数组元素与分子多项式系数之间自右向左逐次对齐,不足部分用零补齐,缺项系数也用零补上。
1.用MATLAB 求控制系统的瞬态响应1)阶跃响应 求系统阶跃响应的指令有:step(num,den) 时间向量t 的范围由软件自动设定,阶跃响应曲线随即绘出step(num,den,t) 时间向量t 的范围可以由人工给定(例如t=0:0.1:10)[y ,x]=step(num,den) 返回变量y 为输出向量,x 为状态向量在MATLAB 程序中,先定义num,den 数组,并调用上述指令,即可生成单位阶跃输入信号下的阶跃响应曲线图。
考虑下列系统:25425)()(2++=s s s R s C 该系统可以表示为两个数组,每一个数组由相应的多项式系数组成,并且以s的降幂排列。
则MATLAB 的调用语句:num=[0 0 25]; %定义分子多项式 den=[1 4 25]; %定义分母多项式step(num,den) %调用阶跃响应函数求取单位阶跃响应曲线grid %画网格标度线 xlabel(‘t/s’),ylabel(‘c(t)’) %给坐标轴加上说明 title(‘Unit -step Respinse of G(s)=25/(s^2+4s+25)’) %给图形加上标题名 则该单位阶跃响应曲线如图2-1所示:为了在图形屏幕上书写文本,可以用text 命令在图上的任何位置加标注。
自动控制原理第二章复习总结(第二版)
⾃动控制原理第⼆章复习总结(第⼆版)第⼆章过程装备控制基础本章内容:简单过程控制系统的设计复杂控制系统的结构、特点及应⽤。
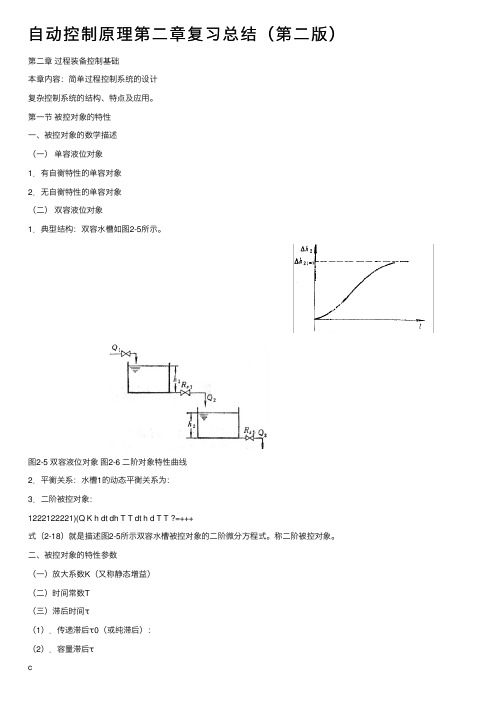
第⼀节被控对象的特性⼀、被控对象的数学描述(⼀)单容液位对象1.有⾃衡特性的单容对象2.⽆⾃衡特性的单容对象(⼆)双容液位对象1.典型结构:双容⽔槽如图2-5所⽰。
图2-5 双容液位对象图2-6 ⼆阶对象特性曲线2.平衡关系:⽔槽1的动态平衡关系为:3.⼆阶被控对象:1222122221)(Q K h dt dh T T dt h d T T ?=+++式(2-18)就是描述图2-5所⽰双容⽔槽被控对象的⼆阶微分⽅程式。
称⼆阶被控对象。
⼆、被控对象的特性参数(⼀)放⼤系数K(⼜称静态增益)(⼆)时间常数T(三)滞后时间τ(1).传递滞后τ0(或纯滞后):(2).容量滞后τc可知τ=τ0+τc。
三、对象特性的实验测定对象特性的求取⽅法通常有两种:1.数学⽅法2.实验测定法(⼀)响应曲线法:(⼆)脉冲响应法第⼆节单回路控制系统定义:(⼜称简单控制系统),是指由⼀个被控对象、⼀个检测元件及变送器、⼀个调节器和⼀个执⾏器所构成的闭合系统。
⼀、单回路控制系统的设计设计步骤:1.了解被控对象2.了解被控对象的动静态特性及⼯艺过程、设备等3.确定控制⽅案4.整定调节器的参数(⼀)被控变量的选择(⼆)操纵变量的选择(三)检测变送环节的影响(四)执⾏器的影响⼆、调节器的调节规律1.概念调节器的输出信号随输⼊信号变化的规律。
2.类型位式、⽐例、积分、微分。
(⼀)位式调节规律1.双位调节2.具有中间区的双位调节3.其他三位或更多位的调节。
(⼆)⽐例调节规律(P )1.⽐例放⼤倍数(K )2.⽐例度δ3.⽐例度对过渡过程的影响(如图2-24所⽰)4.调节作⽤⽐例调节能较为迅速地克服⼲扰的影响,使系统很快地稳定下来。
通常适⽤于⼲扰少扰动幅度⼩、符合变化不⼤、滞后较⼩或者控制精度要求不⾼的场合。
(三)⽐例积分调节规律(PI )1.积分调节规律(I )(1)概念:调节器输出信号的变化量与输⼊偏差的积分成正⽐==?t I t I dt t e T dt t e K t u 00)(1)()(式中:K I 为积分速度,T I 为积分时间。
自动控制原理第二章 胡寿松ppt课件

4、消去中间变量i(t),整理后得整:理版课件
22
第二章 控制系统数学模型
例2、 设一弹簧、质量块、阻
尼器组成的系统如图所示,
当外力F(t)作用于系统时,系 F(t) 统将产生运动。试写出外力
F(t)与质量块的位移y(t)之间
m
的微分方程。
解:
f
1、确立入-出,入-F(t),出—y(t); 2、根据牛顿定律,∑F=ma;
limsF(s)存在 f(0)lifm (t)lism (F s)
s
t 0
s
(6)终值定理
若: L[f(t)]F(s)
f( )lifm (t)lism (F s)
t
s 0
整理版课件
7
第二章 控制系统数学模型
例2、求下列函数的拉氏变换。
(1)f(t)2(1cot)(s2)f(t)sin5(t() 3)f (t)tnet
L[
d
2
dt
f (t) 2
]
s
2
F
(s)
L [ d n f ( t ) ] s n F ( s )整理版课件
5
dt n
第二章 控制系统数学模型
(2)积分性质
若: L[f(t)]F(s)
L [ f(t)d] t1 sF (s)1 s f(t)dt t0
当初始条件为0,则有:
L[
f
(t )dt ]
1 - 311 1 14 s 2s 1s 2 s 1s 2
f(t) L 1 [f(t) ](t) e t 4 e 2 t
整理版课件
16
第二章 控制系统数学模型
例 6 求F(s)s(s2ss11)的拉氏反变换
自动控制原理课件2
Tm
GD 2 R 375 cecm
uf Kfn
K f 反馈电压和转速之间的 比例系数
(3)消去中间变量得直流调速系统的动态微分方程
1 T d T K m kd d 2 n 2t 1 T m K kd d n tn ( 1 K K r k )C eU g
其中 Kr K1K 为s正向通道电压放大系数
R(S)
E(S)
G(S)
-
B(S)
H(S)
Y(S)
2.结构图的组成: (1)信号线:带箭头的直线,箭头表示信号传递方向。 (2)引出点(分离点):表示信号引出或测量的位置。 (3)比较点(相加点):对两个以上信号加减运算。 (4)方框:方框图内输入环节的传递函数。
3 .动态结构图的绘制步骤: (1)确定系统输入量与输出量。 (2)将复杂系统划分为若干个典型环节。 (3)求出各典型环节对应的传递函数。 (4)作出相应的结构图。 (5)按系统各变量的传递顺序,依次将各元件的结构图连接起来。
二、结构图的简化法则 常用的结构图变换方法可归纳为两类:一类是环节的合并,另一类是信号的分支点或相
加点的移动。 结构图的变换必须遵循的原则是:变换前后的数学关系保持不变,因而也称为结构图的
等效变换。
(一)环节的合并 法则一 环节串联,传递函数相乘。
法则二 环节并联,传递函数相加。
法则三 反馈连接的等效传递函数。
(6)延迟环节 (时滞环节、滞后环节) 特点:输出信号经过一段延迟时间τ 后,可完全复现输入信号。
y(t)/r(t)
0τ
r(t) y(t)
t
G(s) es R(s) e s Y(s)
2.4 系统动态结构图
一、概念 1.动态结构图:是描述系统各组成元件之间信号传递关系的数学图形,它 表示了系统的输入输出之间的关系。
自动控制原理试题库完整(2)
⾃动控制原理试题库完整(2)⼀、选择题1. 在伯德图中反映系统抗⾼频⼲扰能⼒的是( C )A. 低频段B. 中频段C. ⾼频段D. ⽆法反映2. 对于⼀、⼆阶系统来说,系统特征⽅程的系数都是正数是系统稳定的( C )A. 充分条件B. 必要条件C. 充分必要条件D. 以上都不是3. 开环传递函数G(s)H(s)=)p s )(p s ()z s (K 211+++,其中p 2>z 1>p 1>0,则实轴上的根轨迹为(A )A.(-∞,-p 2] [-z 1,-p 1]B. (- ∞,-p 2]C. [-p 1,+ ∞)D. [-z 1,-p 1]4. ⼆阶振荡环节的相频特性θ(ω) ,当ω→∞ 时,其相位移θ(ω) 为( B )A .-270°B .-180°C .-90°D .0°5. ⽤频域法分析控制系统时,最常⽤的典型输⼊信号是( D )A. 脉冲函数B. 斜坡函数C. 阶跃函数D. 正弦函数 6. 确定根轨迹与虚轴的交点,可⽤(A)A .劳斯判据B .幅⾓条件C .幅值条件D .dk/ds=07. 设⼀单位反馈控制系统的开环传递函数为)2(4s (G 0+=s s K ),要求20K v =,则K=( A )A .10B .20C .30D .408. 过阻尼系统的动态性能指标是调整时间s t 和( C )A .峰值时间p tB .最⼤超调量σC .上升时间r tD .衰减⽐σ/σ′ 9. 设某系统开环传递函数为)1)(10s s (10s (G 2+++=s ),则其频率特性奈⽒图起点坐标为( C ) A .(-10,j0) B .(-1,j0) C .(1,j0) D .(10,j0)10. ⼀阶系统1TS K S (G +=)的时间常数T 越⼤,则系统的输出响应达到稳态值的时间( A ) A .越长 B .越短 C .不变 D .不定11. 当⼆阶系统的根分布在根平⾯的虚轴上时,系统的阻尼⽐为( B )A .ξ<0B .ξ=0C .0<ξ<1D .ξ≥ 112. 同⼀系统,不同输⼊信号和输出信号之间传递函数的特征⽅程(A )A .相同B .不同C .不存在D .不定13. 传递函数反映了系统的动态性能,它与下列哪项因素有关?(C )A. 输⼊信号B. 初始条件C. 系统的结构参数D. 输⼊信号和初始条件14. 奈奎斯特稳定性判据是利⽤系统的( C ) 来判断闭环系统稳定性的⼀个判别准则。
02 自动控制原理—第二章
Tm
d dt
K u u a K m (Ta
dM c dt
Mc)
电感La较小,故电磁时间常数Ta可以忽略 ,则
Tm
d dt
K uua K m M c
如果取电动机的转角 (rad)作为输出,电枢电压ua (V),考 虑到 d ,可将上式改写成
2.举例 ①一个自变量:励磁电流成正 比,但if增加到某个范围后,磁路饱和,发电机的电势与励磁电流呈 现一种连续变化的非线性函数关系。 设:x—励磁电流, y—发电机的输出电势。 y=f(x)
设原运行于某平衡点(静态工作点) A点:x=x0 , y=y0 ,且y0=f(x0) B点:当x变化△ x, y=y0+△ y 函数在(x0 , y0 )点连续可微,在A 点展开成泰勒级数,即
y k x
df ( x ) k dx x x0
②两个自变量: y=f(x1, x2) 静态工作点: y0=f(x10, x20) 在y0=f(x10, x20) 附近展开成泰勒级数,即
f 1 2 f f 2 f 2 f y f ( x10 , x 20 ) ( x1 x10 ) ( x 2 x 20 ) ( x1 x10 ) 2 ( x1 x10 )( x 2 x 20 ) ( x 2 x 20 ) 2 2 2 x 2! x x 2 x1x 2 x 2 1 1
例2-2
解 设回路电流i1和i2为中间变量。根据基尔霍夫电压定律对前一回 路,有
u i R1i1
对后一回路,有
1 C1
(i
1
i 2 ) dt
1 C2
自动控制原理:第二章--控制系统数学模型全
TaTLma KJe K
dMdML m dtdt
L
Tm
Ra J K eKm
——机电时间常数(秒);
Ta
La Ra
—电动机电枢回路时间常数 (秒)
若输出为电动机的转角q ,则有
TaTm
d 3q
dt 3
Tm
d 2q
dt 2
dq
dt
1 Ke
ua
Tm J
ML
TaTm J
dM L dt
—— 三阶线性定常微分方程 9
(1)根据克希霍夫定律可写出原始方程式
((23))式消LuLCcdd中去(titd)i中2d是utRc间2(中Cti1)变间C1量iR变dCti量idd后udt,ct,(t它)u输r与u(入tc输)(输t)出出uu微rc((tt)分)有方如程下式关系
或
T1T2
d 2uc (t) dt 2
T2
duc (t) dt
扰动输入为负载转矩ML。 (1)列各元件方程式。电动机方程式为:
TaTm
d 2w
dt 2
测输T速Km出发td为d电wt电测压机速w 反 K馈1e系ua数
Tm J
M反L馈 电TaJT压m
dM L dt
ua Kae ut Ktw e ur ut 12
(2)消去中间变量。从以上各式中消去中间变
量ua,e,ut,最后得到系统的微分方程式
线性(或线性化)定常系统在零初始条件下, 输出量的拉氏变换与输入量的拉氏变换之比 称为传递函数。
令线C性(s定)=常L[c系(t统)],由R下(s)述=Ln阶[r(微t)]分,方在程初描始述条:件为零
时[[aab,nnmbssdmdn进mt+ndn+dt行acmmbn(tm拉-r1)-(s1t氏ns)-am1变n+-1b1+…m换dd…1t+,nndd+1a1t得mm1bcs1(11到+ts)r+a关(t0b)]于0C]的RD(sM的s的a(()分s1s(分))=代sdbd为母)t1子为数cd传d多(tt多传方)r递项(项t程递函)式a式0函数c。b(0数tr) (t)
自动控制原理实验报告 (2)

实验一 典型环节的模拟研究及阶跃响应分析1、比例环节可知比例环节的传递函数为一个常数:当Kp 分别为0.5,1,2时,输入幅值为1.84的正向阶跃信号,理论上依次输出幅值为0.92,1.84,3.68的反向阶跃信号。
实验中,输出信号依次为幅值为0.94,1.88,3.70的反向阶跃信号, 相对误差分别为1.8%,2.2%,0.2%. 在误差允许范围内可认为实际输出满足理论值。
2、 积分环节积分环节传递函数为:(1)T=0.1(0.033)时,C=1μf (0.33μf ),利用MATLAB ,模拟阶跃信号输入下的输出信号如图: T=0.1 T=0.033与实验测得波形比较可知,实际与理论值较为吻合,理论上T=0.033时的波形斜率近似为T=0.1时的三倍,实际上为8/2.6=3.08,在误差允许范围内可认为满足理论条件。
3、 惯性环节惯性环节传递函数为:if i o R RU U -=TS1CS R 1Z Z U U i i f i 0-=-=-=1TS K)s (R )s (C +-=K = R f /R 1,T = R f C,(1) 保持K = R f /R 1 = 1不变,观测T = 0.1秒,0.01秒(既R 1 = 100K,C = 1μf ,0.1μf )时的输出波形。
利用matlab 仿真得到理论波形如下: T=0.1时 t s (5%)理论值为300ms,实际测得t s =400ms 相对误差为:(400-300)/300=33.3%,读数误差较大。
K 理论值为1,实验值2.12/2.28,相对误差为(2.28-2.12)/2.28=7%与理论值较为接近。
T=0.01时t s (5%)理论值为30ms,实际测得t s =40ms 相对误差为:(40-30)/30=33.3%由于ts 较小,所以读数时误差较大。
K 理论值为1,实验值2.12/2.28,相对误差为(2.28-2.12)/2.28=7%与理论值较为接近(2) 保持T = R f C = 0.1s 不变,分别观测K = 1,2时的输出波形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
期末测试1单选(2分)离散系统闭环脉冲传递函数的极点,则动态响应为( )•A、等幅脉冲序列•B、发散脉冲序列•C、双向脉冲序列•D、收敛脉冲序列正确答案:A2单选(2分)系统结构如图所示,输出的Z变换为( )•A、•B、•C、•D、正确答案:A3单选(2分)已知,则有( )•A、•B、•C、•D、正确答案:D4单选(2分)如图输出采样信号的Z变换C(z)为( )•A、•B、•C、•D、正确答案:A5单选(2分)下列哪个不就是线性离散系统的数学模型( )•A、离散状态空间表达式•B、差分方程•C、脉冲传递函数•D、普通传递函数正确答案:D6单选(2分)已知X(t)的拉氏变换为,则X(t)的Z变换X(z)为( )。
•A、••C、•D、正确答案:A7单选(2分)判断题图中系统就是否稳定•A、a点不稳定,b点稳定•B、a点稳定,b点不稳定•a、b两点都不稳定•A、输入信号大小•B、系统结构与参数•C、A、B、C都就是•A、输入信号大小•系统结构与参数•C、A、B、C都就是•A、从右向左方向的运动•B、不动点•C、从左向右方向的运动•其它选项都不就是•B、从左向右方向的运动•C、不动点•D、从右向左方向的运动正确答案:C12单选(2分)非线性系统的及的轨迹如下图所示,试问X怎么样变化系统就是稳定的()•A、X变小,系统稳定•B、X变大,系统稳定•X无论怎么变化,系统都就是不稳定的•D、X不用改变,系统就是稳定的正确答案:C13单选(2分)已知非线性系统的微分方程就是, 则奇点性质就是( )•A、稳定焦点•B、鞍点•C、中心点•D、稳定节点正确答案:D14单选(2分)相轨迹振荡远离原点,该奇点为( )•A、不稳定焦点•B、不稳定节点•C、中心点•D、鞍点正确答案:A15单选(2分)两输入,两输出的系统,其模拟结构图如图所示,其状态空间表达式为:()•A、•B、•C、•D、正确答案:D16单选(2分)已知系统传递函数,则系统的约旦标准型的实现为•A、•B、•C、•D、正确答案:C17单选(2分)如下系统的状态能观性分别为:•A、只有一个不能观•B、全部都能观•C、刚好有两个不能观•D、全部都不能观正确答案:B18单选(2分)试将下列系统按能控性进行结构分解•A、•B、•C、•D、正确答案:B19单选(2分)以下传递函数阵的最小实现为:()•A、•B、•C、•D、正确答案:A20单选(2分)已知系统:使观测器的极点为-r,-2r(r>0)的状态观测器为()•A、•B、•C、•D、正确答案:C21多选(3分)已知,下列有关该系统稳定性说法正确的就是()•A、当T=15时,系统不稳定•B、当T=10时,系统稳定•C、当T=6时,系统不稳定•D、当T=3时,系统稳定正确答案:A、D22多选(3分)采样控制系统框图如下,T=1,则有( )•A、K=10时,该系统不稳定•B、K=10时,该系统稳定•C、系统临界稳定时K=24•D、系统临界稳定时K=2、4正确答案:A、D23多选(3分)采样系统的结构如图所示,采样周期T=1s,输入为单位阶跃信号, 系统开环与闭环脉冲传递函数分别为,输出为c(t),则( )•A、•B、•C、•D、正确答案:B、D24多选(3分)已知计算机控制系统如下图所示,采用数字比例控制,其中K>0。
设采样周期T=1s,,则下列说法正确的就是()•A、系统的闭环脉冲传递函数为•B、使系统稳定的K的取值范围就是•C、系统的开环脉冲传递函数为•D、使系统稳定的K的取值范围就是正确答案:A、C、D25多选(3分)设数字控制系统的框图如下,已知,T = 0、5秒,响应斜坡输入信号为r(t) = t时,符合最少拍系统描述的为()•A、•B、•C、•D、正确答案:C、D26多选(3分)设离散系统的方框图如下图所示,设采样周期T=0、1s,。
符合系统描述的有()•A、系统稳定•B、系统稳定•C、系统的闭环脉冲传递函数•D、系统的闭环脉冲传递函数正确答案:A、D27多选(3分)设离散系统如图所示,设,时,若要求其稳态误差,则以下说法中错误的就是( )•A、闭环系统稳定时,•B、该系统的闭环脉冲传递函数为•C、该系统能稳定工作•D、该系统的开环脉冲传递函数为正确答案:A、C28多选(3分)设数字控制系统的框图如下,已知,T =0、5秒,对于响应斜坡输入信号r(t) = t时的最少拍系统(取F(z)=1),下列选项正确的就是()•A、系统输出的z变换为•B、数字控制器的脉冲传递函数为•C、误差信号的z变换为•D、误差信号的z变换为正确答案:B、D29多选(3分)非线性系统的及的轨迹如下图所示,以下说法正确的就是( )•A、P点与Q点都存在自持振荡•B、系统有可能发生自持振荡•C、P处存在自持振荡•D、Q处存在自持振荡正确答案:B、C、D30多选(3分)求下图中以电压为输入量,以电感中的电流与电容上的电压作为状态变量的状态方程为___,以电阻上的电压作为输出量的输出方程为___。
()•A、•B、•C、•D、正确答案:B、C31多选(3分)已知系统的状态空间模型为现用进行状态变换,其变换矩阵为则状态变换后的状态方程与输出方程分别为:()•A、•B、•C、•D、正确答案:C、D32多选(3分)已知系统的传递函数为其能控标准型为()与能观标准型为()•A、•B、•C、•D、正确答案:A、D33多选(3分)确定二次型函数中的待定系数的取值范围,从而使其成为正定的•A、ac<2b•B、a>0•C、abc-4a-b-c-4>0•D、ab-1>0正确答案:B、C、D34多选(3分)对线性系统作状态反馈,闭环系统的状态空间模型与传递函数分别为:()•A、•B、•C、•D、正确答案:B、C35多选(3分)给定被控系统的状态空间模型为该系统的状态不能直接测量,要求设计一个带状态观测器的状态反馈系统,要求将其状态观测部分的极点配置在-5,-7与-8处,状态反馈部分的极点配置在-1,-2与-3处。
则状态反馈与状态观测分别为:()•A、•B、•C、•D、正确答案:A、D36D判断(1分)离散控制系统稳定的充分必要条件就是系统的特性方程的根都在Z平面上以原点为圆心的单位圆内。
•A、•B、正确答案:B37C判断(1分)某离散控制系统(单位反馈T=0、1)当输入r(t)=t 时、该系统稳态误差为•A、•B、正确答案:B38C判断(1分)在使用脉冲传递函数分析系统的动态响应与稳态误差时,该系统应就是输入与初始状态都等于零。
•A、•B、正确答案:B39D判断(1分)代表时域中的延迟算子••A、•A、•A、••A、•A、•A、•B、正确答案:A46D判断(1分)非线性系统稳定性常用lyapunov第一法与第二法判断•A、•B、正确答案:B47C判断(1分)输出方程就是描述系统输出与输入之间关系的方程•A、•B、正确答案:B48D判断(1分)系统状态空间表达式中,若f与g均为线性函数,则称系统一定为线性系统•A、•B、•A、•A、•A、k时刻之后的输入•B、k时刻之前的输出•C、k时刻之前的输入•D、k时刻的输入正确答案:A2单选(2分)下图开环离散系统的脉冲传递函数为( )•A、•B、•C、•D、正确答案:A3单选(2分)离散控制系统(单位反馈T=0、1)当输入r(t)=t 时、该系统稳态误差为( )•A、•B、1•C、•D、2正确答案:A4单选(2分)在使用脉冲传递函数分析系统的动态响应与稳态误差时,该系统应就是( )•A、输入与初始状态都不等于零•B、初始状态等于零•C、输入与初始状态都等于零•D、输入等于零正确答案:B5单选(2分)闭环离散系统的输出C(z)=( )•A、•B、•C、•D、正确答案:A6单选(2分)离散系统闭环脉冲传递函数的极点,则动态响应为( )•A、收敛脉冲序列•B、双向脉冲序列•C、等幅脉冲序列•D、发散脉冲序列正确答案:D7单选(2分)已知X(t)的拉氏变换为,则X(t)的Z变换X(z)为•A、•B、•C、•D、正确答案:C8单选(2分)设开环离散系统如图所示,该系统的开环脉冲传递函数为()。
•A、•B、•C、•D、正确答案:B9单选(2分)设开环离散系统如图所示,系统的开环脉冲传递函数G(z) = ()。
•A、•B、•C、•D、正确答案:D10单选(2分)下图所示为某一闭环离散系统,则该系统的脉冲传递函数为()•A、•B、•C、•D、正确答案:B11单选(2分)离散系统闭环脉冲传递函数的极点,则动态响应为( )。
•A、双向发散脉冲序列•B、双向收敛脉冲序列•C、双向等幅脉冲序列•D、单向脉冲序列正确答案:A12单选(2分)的z变换就是( )•A、•B、•C、•D、正确答案:D13单选(2分)z变换中z的定义为( )。
•A、•B、•C、•D、正确答案:C14单选(2分)离散控制系统稳定的充分必要条件就是( )。
•A、闭环特性方程的根都在Z平面的右半平面•B、闭环特性方程的根都在Z平面的左半平面•C、闭环特性方程的根都在Z平面上以原点为圆心的单位圆内•D、闭环特性方程的根都在Z平面上以原点为圆心的单位圆外正确答案:C15单选(2分)f(t)=t的Z变换就是()。
•A、••C、•D、正确答案:D16单选(2分)已知X(t)的拉氏变换为,则X(t)的Z变换X(z)为()。
•A、•B、•C、•正确答案:B17单选(2分)离散控制系统,T=1s,当输入r(t)=t时,该系统稳态误差为()•A、•B、2•C、1•D、正确答案:C18单选(2分)设采样系统结构图如下,T=1s,则该系统G(z)为( )。
•A、•B、•C、•D、正确答案:D19单选(2分)已知则其z反变换为()。
•A、•B、•C、•D、正确答案:A20单选(2分)离散系统闭环脉冲传递函数的极点,则动态响应为( )•A、收敛脉冲序列•B、双向脉冲序列•C、等幅脉冲序列•D、发散脉冲序列。