注塑机的上下料机械手设计
注塑机上下料机械手
内容摘要:本文对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构;设计了机械手的手臂结构。
设计出了机械手的液动系统,绘制了机械手液压系统工作原理图。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图和梯形图,并编制了可编程序控制器的控制程序。
关键词:机械手,液动,可编程序控制器(PLC)Abstract :In this paper, hands on mechanical design of an overall program to determine the coordinates of the robot type and degree of freedom to determine the technical parameters of the manipulator. At the same time, the design of the mechanical hand gripping the hand-type structure; designed robot arm structure. Designed hydraulic manipulator system manipulator drawn schematic diagram of hydraulic system.The use of programmable logic controller to control the robot, select the appropriate PLC model, based on workflow manipulator developed a PLC control program, the mechanical hand to draw timing diagrams and ladder work and preparation that can be controller programmed control procedures.Key words: mechanical hand, hydraulic, programmable logic controller (PLC)第1章绪论第2章1.1机械手概述工业机器人由操作机、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
注塑机上下料机械手
内容摘要:本文对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构;设计了机械手的手臂结构。
设计出了机械手的液动系统,绘制了机械手液压系统工作原理图。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图和梯形图,并编制了可编程序控制器的控制程序。
关键词:机械手,液动,可编程序控制器(PLC)Abstract :In this paper, hands on mechanical design of an overall program to determine the coordinates of the robot type and degree of freedom to determine the technical parameters of the manipulator. At the same time, the design of the mechanical hand gripping the hand-type structure; designed robot arm structure. Designed hydraulic manipulator system manipulator drawn schematic diagram of hydraulic system.The use of programmable logic controller to control the robot, select the appropriate PLC model, based on workflow manipulator developed a PLC control program, the mechanical hand to draw timing diagrams and ladder work and preparation that can be controller programmed control procedures.Key words: mechanical hand, hydraulic, programmable logic controller (PLC)第1章绪论工业机器人由操作机、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
自动上下料机械手设计
对于通用型的机械手臂,它的程序可以进行变量,而且动作也极其灵敏,机械手臂 也活动灵活,还是采用的单独的控制系统。对于这样的机械手臂,它的优点十分的明显, 不但精度十分的高,适用一般所用的类型,而且它的工作范围也极其的广,像这样的机 械手臂,它比较适用于那些生产加工时总来回变换不同工件的生产企业,而且加工的 量也是很小的那种。
(1)可以在恶劣的环境下进行工作,而对人不利的一些因素在它身上都可以忽略, 这也就使得该机械手臂有更好的发挥场所,不局限于一些人为的因素。
(2)该机械手经久耐用,坚固耐用,对于那些比较单一的工作,可以免去人力而换 成机械手臂去代替操作,达到节约人力物力的作用。
2.记忆再现型工业机械手
对于这种具有具有存储记忆功能的机械手臂,他是通过人由转动实验装置,通过 一些由记忆记录设备进行记录,例如磁带,如此一来,这个机械手臂就会按照这个模式 一遍遍的去重复这个动作,去重复的生产。
这也是使用极其普遍的一个,它所用到的驱动机子一般都是电液伺服类型,这 种和前面的相比较,它具有更多的自由度,如此一来,对于一些需要多轴操作的工件它 都能够单独的完成其操作。
第2章工业机械手的设计方案7
第2.1节 工业机械手的组成7
第2.2节规格参数7
第2.3节 设计路线与方案8
第3章机械手各部分的计算与分析9
第3.1节 手部计算与分析9
第3.2节 腕部计算与分析16
第3.3节臂部计算与分析21
第3.4节 机身计算与分析31
第4章液压系统32
第4.1节液压缸32
第4.2节 计算和选择液压元件34
在现如今科技发展迅猛的句式下,机械和电子的使用相当频繁,而且也越来越高 端,并且涉及到生活的许多方面,对于机械手臂,在制造行业也运用的很多。机械手臂 的最初提出基于汽车半轴,包括了它的设计原理和思路,并且汽车的半轴的特点,有很 深的利用价值。
注塑机专用卸料机械手设计
随着世界经济和技术的发展,人类活动的不断扩大,机器人应用正迅速向社会生产和生活的各个领域扩展,也从制造领域转向非制造领域,各种各样的机器人产品随之出现。
像海洋开发、宇宙探测、采掘、建筑、医疗、农林业、服务、娱乐等行业都提注塑机专用卸料机械手设计①王才峄 宁宗奇 季韬(上海工程技术大学高职学院 上海 200437)摘 要:本文设计了一套基于PLC的注塑机专用卸料机械手。
该型机械手是为注塑生产自动化设备专门配备的机械,采用气压及液压传动系统驱动,用PLC进行控制。
该设备可以减轻繁重的体力劳动、改善劳动条件和安全生产。
关键词:机械手 气压系统 液压系统 PLC 中图分类号:TP241文献标识码:A 文章编号:1672-3791(2013)11(c)-0078-02①作者简介:王才峄(1981,2—),男,汉族,上海人,硕士,上海工程技术大学高职学院,理论教师,讲师,现任教机电一体化专业。
宁宗奇,上海工程技术大学高职学院,讲师;季韬,上海工程技术大学高职学院,在读学生。
出了自动化各机器人化的要求。
随着机器人的产生和大量应用,很多领域,许多单一、重复的机械工作由机器人(也称机械手)来完成。
注塑机机械手是为注塑生产自动化设备专门配备的机械,其针对不同的注塑成品采用不同的机构进行快速而有效的上下料操作。
本文设计了一款用于生产瓶胚的注塑机的卸料机械手,其基于气压、液压传动及PLC控制技术,工作可靠,易于与注塑机融合,极大地提高了注塑成型机的生产效率、安全性,降低了生产成本,增强了企业的竞争力。
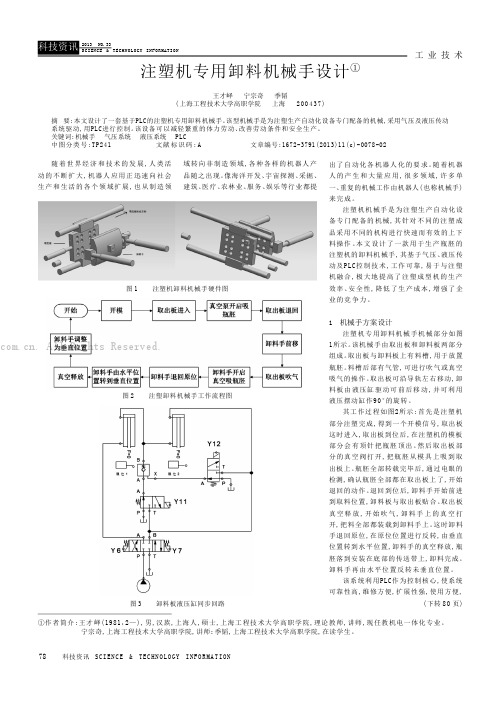
1 机械手方案设计注塑机专用卸料机械手机械部分如图1所示。
该机械手由取出板和卸料板两部分组成。
取出板与卸料板上有料槽,用于放置瓶胚。
料槽后部有气管,可进行吹气或真空吸气的操作。
取出板可沿导轨左右移动,卸料板由液压缸驱动可前后移动,并可利用液压摆动缸作90°的旋转。
其工作过程如图2所示:首先是注塑机部分注塑完成,得到一个开模信号,取出板这时进入,取出板到位后,在注塑机的模板部分会有顶针把瓶胚顶出。
基于PLC的自动上下料机械手设计
中图分类号:TP241
文献标识码:B
机械手是工业生产发展中的必然产物,它能按照规定要 求输送工件或握持工具进行操作,可为企业生产降低成本的 同时提高生产效率。随着科技的发展,机械手的应用领域越来 越广泛,特别是在工业自动化生产线上应用尤为突出。例如在 单机自动化的基础上,采用自动机械手装置输送工件,可使一 些单机连接成自动生产线。本文所阐述的自动上下料机械手, 是根据苏州奥普康科技有限公司的生产线实际情况,将注射 机和老化烘箱通过该设备连接成自动生产线。
经现场运行调试,该自动上下料机械手运行良好,达到了 设计要求。客户使用后反映,该设备运行稳定性好,可靠性高, 投入生产线后,大大减少了企业劳动力成本,提高了生产效率。
参考文献:
[1] 吴鸿平.基于 PLC 的清花生产 线 自 动 控 制 系 统 [J]. 机 电 设 备 ,
2004,(6):34-36
2007,(9):31-32.
[5] 熊幸明,曹才开. 一种工业机械手的 PLC 控制[J].微计算机信息,
2006,22(11):121-122.
[6] 张慧鹏,刘小琴,等. 基于 PLC 控制的工业机械手[J]. 机械管理开
发,2009,24(4):45-46.
(下转第 74 页)
71
Equipment Manufactring Technology No.9,2010
在准确测量出铂电阻的阻值后,最后一步就是将铂电阻 的阻值转换为对应的温度值,可以很容易地采用查表法和线 性查值法相结合的方法,实现铂电阻的阻值与对应的温度值 的变换。
4 实验结果
采用本文的铂电阻测量方法,用在热量表的温度测量中 (PT1000 铂电阻)进行实验。对热量表用标准电阻箱在 0℃和 100℃进行高低点校准后,接 PT1000 铂电阻对实际的恒温槽 进行多个温度点的测量。根据对多块表的实测统计,25℃时, 在测量范围内(0~95 ℃),热量表温度测量的总体误差为 ± 0.15 ℃。
自动上下料机械手的设计
自动上下料机械手的设计自动上下料机械手是一种能够自动完成工件的上下料任务的设备。
它主要由机械臂、夹爪、传感器、控制系统等组成,能够自动识别、抓取和放置工件。
机械手的设计需要考虑到工件的类型、重量、形状等因素,并且还需要具备高精度、高速度以及稳定可靠的特点。
在设计自动上下料机械手时,首先需要确定其工作环境和要处理的工件类型。
不同的工作环境和工件类型会影响机械手的尺寸、负载能力以及其他技术指标。
机械手的尺寸要根据工作空间的大小来设计,同时还要考虑到其机械臂的可移动范围,以便能够灵活地适应不同的工作环境。
机械手的负载能力是指其能够承载的最大重量,需要根据工件的重量来确定。
同时,还需要考虑到工件的形状和尺寸,以便夹爪能够牢固地抓取工件。
夹爪的设计需要具备可调节的功能,以便能够适应不同形状和尺寸的工件。
对于一些比较脆弱或复杂的工件,还可以设计专用的夹具来增加抓取和放置的稳定性。
机械手还需要具备高精度和高速度的特点。
高精度是指机械手能够准确地识别、抓取和放置工件,需要采用高精度的传感器和控制系统来实现。
高速度是指机械手能够在短时间内完成上下料任务,需要采用高速度的执行器和控制算法来实现。
控制系统是机械手的核心部分,可以根据工件的形状、尺寸和重量来控制机械臂和夹爪的动作。
控制系统需要能够实时地接收和处理传感器的信号,并且能够根据这些信号来控制机械手的动作。
对于一些复杂的工件,还可以采用计算机视觉技术来实现自动识别和抓取。
在设计自动上下料机械手时,还需要考虑到安全性和可靠性。
安全性是指机械手在工作过程中能够避免伤人和损坏设备的危险。
为了确保安全性,可以在机械手周围设置安全围栏和急停开关,并且在控制系统中设置相应的安全控制算法。
可靠性是指机械手能够长时间稳定地工作,需要采用可靠的执行器和传感器,并且进行适当的维护和保养。
总之,设计自动上下料机械手需要考虑到工作环境、工件类型、尺寸、重量、形状以及精度、速度、安全性和可靠性等因素。
自动上下料机械手毕业设计

自动上下料机械手毕业设计一、需求分析随着工业自动化水平的提高,自动上下料机械手在工业生产线上的作用越来越重要。
自动上下料机械手能够替代人工完成重复的上下料工作,提高生产效率和产品质量。
因此,设计一个具有自动上下料功能的机械手成为了当前毕业设计的热门课题之一二、系统结构设计在设计自动上下料机械手之前,需要先明确机械手的结构和工作原理。
1.结构设计2.工作原理机械手的工作原理主要分为三个步骤:识别物体位置、抓取物体、放置物体。
a.物体识别机械手需要通过视觉系统或传感器来识别需要上下料的物体位置。
视觉系统可以通过图像处理技术识别物体的形状、颜色和位置信息,传感器可以通过接触或非接触方式感知物体的位置。
b.抓取物体机械手通过夹爪对物体进行抓取。
夹爪可以采用机械夹持、气动夹持或电磁夹持等方式来完成抓取动作。
在抓取物体时需要注意夹爪的力度和抓取位置,以确保物体不会被损坏或滑落。
c.放置物体机械手将抓取的物体放置到目标位置。
在放置物体时同样需要注意放置位置和力度,以确保物体能够准确放置到目标位置。
三、技术选型在设计自动上下料机械手的过程中,需要选取合适的技术和材料。
1.机械结构机械结构可以采用金属、塑料或复合材料制作,具体选材要根据机械手的负荷和精度要求来决定。
2.夹爪夹爪可以根据具体应用选择合适的类型,例如并行夹爪、夹具夹爪或磁力夹爪等。
3.控制系统机械手的运动控制系统可以采用单片机、PLC或伺服电机控制等方式。
选择控制系统时需要考虑运动速度、精度和整体效率等因素。
四、系统实现在设计完机械手的结构和选型之后,需要进行系统的实现。
1.机械结构制作根据设计要求制作机械手的机械结构,包括机械臂、夹爪和固定装置等。
2.控制系统搭建根据选定的控制系统,搭建机械手的运动控制系统。
可以通过编程、电路连接和传感器安装等方式完成。
3.调试和测试完成机械手的组装后,进行调试和测试。
通过调试和测试可以发现和解决机械手运动、抓取和放置等环节出现的问题,并对系统进行优化和改进。
注塑机下料专用机械手的设计与研究
注塑机下料专用机械手的设计与研究I. 内容简述随着科技的不断发展,注塑机在现代制造业中扮演着越来越重要的角色。
然而传统的注塑机下料方式存在一定的局限性,如效率低、精度差等问题。
为了提高注塑机的下料效率和精度,本文对注塑机下料专用机械手进行了设计与研究。
本研究首先分析了注塑机下料过程中存在的问题,如操作人员劳动强度大、生产效率低、安全隐患等。
针对这些问题,提出了采用注塑机下料专用机械手进行自动化生产的解决方案。
该机械手通过精确的运动控制和定位功能,实现了对注塑机模具内零件的快速、准确抓取和放置,从而提高了生产效率和产品质量。
为了满足不同类型模具的需求,本文设计了一种通用的注塑机下料专用机械手结构。
该结构包括底座、手臂、手指、夹具等部分,具有较高的刚性和稳定性。
同时通过采用先进的传感器技术,实现了对机械手运动轨迹的实时监测和控制,保证了下料过程的稳定性和安全性。
此外本文还对注塑机下料专用机械手的运动学模型进行了建模和仿真分析,验证了机械手性能的有效性。
通过对仿真结果的优化,进一步提高了机械手的性能和实用性。
本文对注塑机下料专用机械手的应用前景进行了展望,认为随着技术的不断进步,该机械手将在注塑机行业发挥更加重要的作用,为实现工业自动化和智能制造提供有力支持。
A. 注塑成型技术的发展和应用现状随着科技的不断进步,注塑成型技术在工业生产中的应用越来越广泛。
注塑成型技术是一种通过将熔融塑料注入模具,经过冷却定型后取出成型品的工艺。
这种工艺具有生产效率高、成本低、产品精度高等优点,因此在汽车、电子、家电、医疗器械等领域得到了广泛的应用。
高精度注塑成型技术的发展。
为了满足产品的高精度要求,注塑成型技术不断进行技术创新,如采用高精度伺服电机驱动系统、精密导轨和测量装置等,以提高产品的尺寸精度和表面质量。
多材料注塑成型技术的研究。
为了满足不同材料的使用需求,研究人员不断探索新的注塑材料和工艺方法,如热塑性弹性体(TPE)、聚酰亚胺(PI)等新型材料的注塑成型技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要本文对机械手进行了总体方案设计,确定了机械手的座标型式和自由度,确定了机械手的技术参数。
同时,设计了机械手的夹持式手部结构;设计了机械手的手臂结构。
设计出了机械手的液动系统,绘制了机械手液压系统工作原理图。
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图和梯形图,并编制了可编程序控制器的控制程序。
关键词:机械手,液动,可编程序控制器(PLC)AbstractIn this paper, hands on mechanical design of an overall program to determine the coordinates of the robot type and degree of freedom to determine the technical parameters of the manipulator. At the same time, the design of the mechanical hand gripping the hand-type structure; designed robot arm structure. Designed hydraulic manipulator system manipulator drawn schematic diagram of hydraulic system.The use of programmable logic controller to control the robot, select the appropriate PLC model, based on workflow manipulator developed a PLC control program, the mechanical hand to draw timing diagrams and ladder work and preparation that can be controller programmed control procedures.Key words: mechanical hand, hydraulic, programmable logic controller (PLC)目录内容摘要 (1)关键词 (1)Abstract (1)Key word (1)第1章绪论 (2)1.1机械手概述 (2)1.2机械手的组成和分类 (2)1.3课题的提出及主要任务 (4)第2章机械手的设计方案 (6)2.1机械手的座标型式与自由度和工作范围 (6)2.2 机械手的手部结构方案设计 (7)2.3 机械手的手臂结构方案设计 (7)2.4机械手的驱动方案设计 (7)2.5 机械手的控制方案设计 (7)2.6机械手的主要参数 (7)2.7机械手的技术参数列表 (8)第3章手部结构设计 (10)3.1手部设计 (10)3.2手部夹紧液压缸的设计 (11)第4章手臂结构设计 (15)4.1手臂伸缩 (15)4.2手臂升降和回转部分 (16)4.3手臂伸缩液压缸的设计 (16)4.4 液压系统主要参数 (19)4.5液压系统图 (25)第5章机械手的控制系统 (28)5.1 可编程序控制器的选择及工作过程 (28)5.2可编程序控制器的使用步骤 (29)5.3机械手可编程序控制器控制方案 (29)第6章致谢 (33)第7章参考文献 (34)第1章绪论1.1机械手概述工业机器人由操作机、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
生产中应用机械手可以提高生产的自动化水平和劳动生产率:可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。
因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用.1.2机械手的组成和分类1.2.1机械手的组成机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成。
各系统相互之间的关系如方框图1-1所示。
图1-1机械手的组成方框图(一)执行机构包括手部、手腕、手臂和立柱、机座等部件,有的还增设行走机构。
(二)驱动系统驱动系统是驱动工业机械手执行机构运动的动力装置,通常由动力源、控制调节装置和辅助装置组成。
常用的驱动系统有液压传动、气压传动、电力传动和机械传动。
(三)控制系统控制系统是支配着工业机械手按规定的要求运动的系统。
目前工业机械手的控制系统一般由程序控制系统和电气定位(或机械挡块定位)系统组成。
(四)位置检测装置控制机械手执行机构的运动位置,并随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置。
1.2.2机械手的分类工业机械手的种类很多,关于分类的问题,目前在国内尚无统一的分类标准,在此暂按使用范围、驱动方式和控制系统等进行分类。
(一)按用途分机械手可分为专用机械手和通用机械手两种:(二)按驱动方式分机械手可分为液压传动机械手、气压传动机械手、机械传动机械手、电力传动机械手。
本设计是液压传动机械手的设计。
1、液压传动机械手是以液压的压力来驱动执行机构运动的机械手。
其主要特点是:抓重可达几百公斤以上、传动平稳、结构紧凑、动作灵敏。
但对密封装置要求严格,不然油的泄漏对机械手的工作性能有很大的影响,且不宜在高温、低温下工作。
若机械手采用电液伺服驱动系统,可实现连续轨迹控制,使机械手的通用性扩大,但是电液伺服阀的制造精度高,油液过滤要求严格,成本高。
(三)按控制方式分1、点位控制它的运动为空间点到点之间的移动,只能控制运动过程中几个点的位置,不能控制其运动轨迹。
若欲控制的点数多,则必然增加电气控制系统的复杂性。
目前使用的专用和通用工业机械手均属于此类。
2、连续轨迹控制它的运动轨迹为空间的任意连续曲线,其特点是设定点为无限的,整个移动过程处于控制之下,可以实现平稳和准确的运动,并且使用范围广,但电气控制系统复杂。
这类工业机械手一般采用小型计算机进行控制。
1.3课题的提出及主要任务1.3.1课题的提出随着工业自动化程度的提高,工业现场的很多易燃、易爆等高危及重体力劳动场合必将由机器人所代替。
这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产率。
例如,注塑及的生产过程中,往往工件、材料的上下要人工完成,既费时费力,又影响效率。
为此,我们把上下料机械手作为我们研究的课题。
现在的机械手大多采用液压传动,液压传动存在以下几个优点:(1)液压传动能方便地实现无级调速,调速范围大。
(2)在相同功率情况下,液压传动能量转换元件的体积较小,重量较轻。
(3)工作平稳,换向冲击小,便于实现频繁换向。
(4)便于实现过载保护,而且工作油液能使传动零件实现自润滑,故使用寿命长。
(5)操纵简单,便于实现自动化。
特别是和电气控制联合使用时,易于实现复杂的自动工作循环。
(6)液压元件易于实现系列化、标准化和通用化。
1.3.2课题的主要任务本课题将要完成的主要任务如下:(1)机械手为注塑机机械手,因此它是专用机械手.(2)选取机械手的座标型式和自由度(3)设计出机械手的各执行机构,包括:手部、手臂等部件的设计。
手部设计成夹持式手指来抓取工件(4)液压传动系统的设计本课题将设计出机械手的液压传动系统,包括液动元器件的选取,液动回路的设计,并绘出液动原理图。
(5)机械手的控制系统的设计本机械手拟采用可编程序控制器(PLC)对机械手进行控制,本课题将要选取PLC型号,根据机械手的工作流程编制出PLC程序,并画出梯形图。
第2章机械手的设计方案对液动机械手的基本要求是能快速、准确地搬运工件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。
设计液动机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定最合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对机械手结构及运行控制的要求;尽量选用定型的标准组件,简化设计制造过程,增强专用性,并能实现柔性转换和编程控制。
本次设计的机械手是注塑机专用液动上下料机械手,专用机械手具有动作少、工作对象单一、结构简单、使用可靠和造价低等特点。
2.1机械手的座标型式与自由度和工作范围按机械手手臂的不同运动形式及其组合情况,其座标型式可分为直角座标式、圆柱座标式、球座标式和关节式。
由于本机械手在上下料时手臂具有升降、收缩及回转运动,因此,采用圆柱座标型式。
相应的机械手具有三个自由度,为了弥补升降运动行程较小的缺点,增加手臂摆动机构,从而增加一个手臂上下摆动的自由度。
图2-1所示为机械手的手臂的运动示意图和工作范围图。
图 2-1 机械手的运动示意图和工作范围图2.2 机械手的手部结构方案设计为了适应注塑机,把机械手的手部结构设计成夹持式手部,可以准确的夹取工件。
2.3 机械手的手臂结构方案设计按照抓取工件的要求,本机械手的手臂有三个自由度,即手臂的伸缩、左右回转和升降(或俯仰)运动。
手臂的回转和升降运动是通过立柱来实现的,立柱的横向移动即为手臂的横移。
手臂的各种运动由液压缸来实现。
2.4机械手的驱动方案设计由于液压传动系统的工作平稳,换向冲击小,便于实现频繁换向,因此选用液压传动系统。
2.5 机械手的控制方案设计考虑到机械手的专用性,同时使用点位控制,因此我们采用可编程序控制器 (PLC)对机械手进行控制。
当机械手的动作流程改变时,只需改变PLC程序即可实现,非常方便快捷。
2.6机械手的主要参数1、主参数机械手的最大抓重是其规格的主参数,目前机械手最大抓重以10公斤左右的为数最多。
故该机械手主参数定为10公斤,高速动作时抓重减半。
2、基本参数运动速度是机械手主要的基本参数。
操作节拍对机械手速度提出了要求,设计速度过低限制了它的使用范围。
而影响机械手动作快慢的主要因素是手臂伸缩及回转的速度。
该机械手最大移动速度设计为1m/s,最大回转速度设计为1000°/s,平均移动速度为lm/s,平均回转速度为900°/s。