背景差法是 3种
基于Processing的移动物体追踪定位
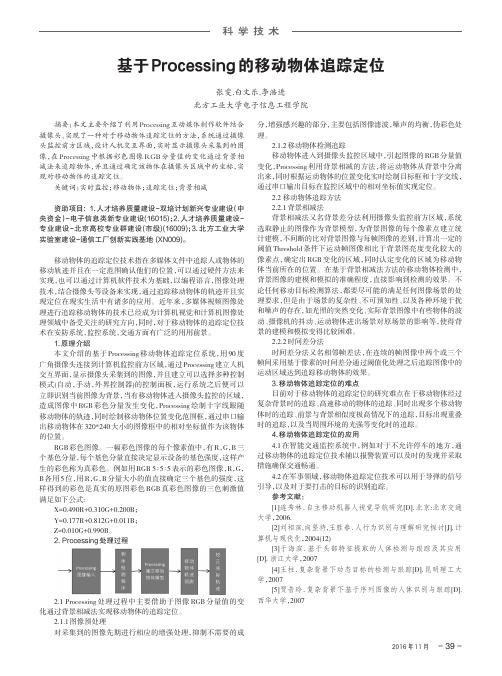
基于Processing的移动物体追踪定位张雯,白文乐,李浩进北方工业大学电子信息工程学院摘要:本文主要介绍了利用Processing互动媒体制作软件结合摄像头、实现了一种对于移动物体追踪定位的方法,系统通过摄像头监控前方区域,设计人机交互界面,实时显示摄像头采集到的图像,在Processing中根据彩色图像RGB分量值的变化通过背景相减法来追踪物体,并且通过确定该物体在摄像头区域中的坐标,实现对移动物体的追踪定位。
关键词:实时监控;移动物体;追踪定位;背景相减资助项目: 1.人才培养质量建设-双培计划新兴专业建设(中央资金)-电子信息类新专业建设(16015);2.人才培养质量建设-专业建设-北京高校专业群建设(市级)(16009);3.北方工业大学实验室建设-通信工厂创新实践基地(XN009)。
移动物体的追踪定位技术指在多媒体文件中追踪人或物体的移动轨迹并且在一定范围确认他们的位置,可以通过硬件方法来实现,也可以通过计算机软件技术为基础,以编程语言,图像处理技术,结合摄像头等设备来实现,通过追踪移动物体的轨迹并且实现定位在现实生活中有诸多的应用。
近年来,多媒体视频图像处理进行追踪移动物体的技术已经成为计算机视觉和计算机图像处理领域中备受关注的研究方向,同时,对于移动物体的追踪定位技术在安防系统,监控系统,交通方面有广泛的用用前景。
1.原理介绍本文介绍的基于Processing移动物体追踪定位系统,用90度广角摄像头连接到计算机监控前方区域,通过Processing建立人机交互界面,显示摄像头采集到的图像,并且建立可以选择多种控制模式(自动,手动,外界控制器)的控制面板,运行系统之后便可以立即识别当前图像为背景,当有移动物体进入摄像头监控的区域,造成图像中RGB彩色分量发生变化,Processing绘制十字线跟随移动物体的轨迹,同时绘制移动物体位置变化范围框,通过串口输出移动物体在320*240大小的图像框中的相对坐标值作为该物体的位置。
交通监控系统中帧差法与背景差分法优劣分析
交通监控系统中帧差法与背景差分法优劣分析孙欢;尚绪凤;朱赵龙;张贺泉【摘要】交通路口监控系统因其能够主动收集分析数据,并实时检测进行预设处理,随着该技术的不断成熟,针对不同环境条件产生的多种图像处理方法。
文中对其中两种方法:帧差法和背景差分法,在一般情况下的优劣性进行分析研究,通过模拟仿真得到帧差法要比背景差分法准确性更高。
%The new monitoring system of traffic crossing has attracted wide public concern for its initiative to collect and analyze data to design processing and real-time detection.With the development of technology,scientists have created a lot of image processing methods according for different environments.This paper aims at two main methods:the frame difference and background difference methods.We analyze their general advantages andputer simulation shows that the frame difference is better than the background difference method.【期刊名称】《电子科技》【年(卷),期】2012(025)010【总页数】4页(P1-3,7)【关键词】视频分析;车流量;差分模型;检测线【作者】孙欢;尚绪凤;朱赵龙;张贺泉【作者单位】中国计量学院理学院,浙江杭州310018;中国计量学院理学院,浙江杭州310018;中国计量学院理学院,浙江杭州310018;中国计量学院理学院,浙江杭州310018【正文语种】中文【中图分类】TP277.2;TP391.41新型监控系统可以通过区分监控对象的特征,主动收集数据、分析数据,并根据预设条件执行报警、记录、分析等动作。
《数字图像处理》教学大纲
《数字图像处理》教学大纲
一、课程简介
数字图像处理是机器视觉、模式识别、医学图像处理等的基础,本课程为工程专业的学生提供数字图像处理的基本知识,是理论性和实践性都很强的综合性课程。
课程内容广泛涵盖了数字图像处理的基本原理,包括图像采样和量化、图像算术运算和逻辑运算、直方图、图像色彩空间、图像分割、图像形态学、图像频域处理、图像分割、图像降噪与图像复原、特征提取与识别等。
二、课程目标
通过本课程学习,学生可以掌握数字图像处理的基本方法,具备一定的解决图像处理应用问题的能力,培养解决复杂工程问题的能力。
具体目标如下:
1.掌握数字图像处理的基本原理、计算方法,能够利用专业知识并通过查阅资
料掌握理解相关新技术,对检测系统及处理流程进行创新性设计;
2.能够知晓工程领域中涉及到的数字图像处理技术,理解其适用场合、检测对
象及条件的限制,能根据给定的目标要求,针对工业检测中的工程问题选择和使用合适的技术和编程,进行仿真和分析;
3.能够知晓工程领域中所涉及的现代工具适用原理及方法,根据原理分析和仿
真结果,进行方案比选,确定设计方案,具有检测算法的设计能力;
4.通过校内外资源和现代信息技术,了解数字图像处理发展趋势,提高解决复
杂工程问题的能力。
三、课程目标对毕业要求的支撑关系
四、理论教学内容及要求
四、实验教学内容及要求
五、课程考核与成绩评定
六、教材及参考书。
背景差分法基本原理
背景差分法基本原理
背景差分法是一种用于运动目标检测的方法,其基本原理是利用图像序列中的当前帧和背景参考模型进行比较,以检测出运动物体。
这种方法的关键在于背景图像的建模和模拟,因为它们的准确程度直接影响检测效果。
具体来说,背景差分法通过从连续的图像序列中提取出运动物体的信息来检测运动物体。
首先,它会获取一段连续的图像序列,并从中选择一帧作为背景参考帧。
然后,它会将后续的帧与背景参考帧进行比较,计算出每个像素点之间的差异。
这些差异反映了运动物体的位置和速度信息。
背景差分法通常使用像素强度的绝对值作为差异度量,但也可以使用像素强度的平方差或其它度量方式。
在实际应用中,通常会使用阈值来判断像素点是否属于运动物体。
如果像素点的差异超过了阈值,那么该像素点就被认为是属于运动物体。
背景差分法的优点在于速度快、检测准确、易于实现。
然而,这种方法也存在着一些局限性。
例如,它对于场景的动态变化和光照变化比较敏感,需要定期更新背景模型以适应这些变化。
此外,如果场景中有一些物体的运动模式与背景相似,或者运动物体的速度与背景的速度相近,那么这种方法可能会出现误检。
总的来说,背景差分法是一种非常有用的运动目标检测方法,但它也需要针对特定场景进行适当的调整和优化。
改进的背景差值法目标检测算法
aitcg 1 tr to hn . l i oas age ut e s
Ke o d : o igo jc ; tr g b cg o n iee c a eme o ; r h lg ; p n a o tm yw r s m v be t  ̄ e n ; ak u d d rn e l t d mop oo y o e g r h n s i r f vu h l i
的
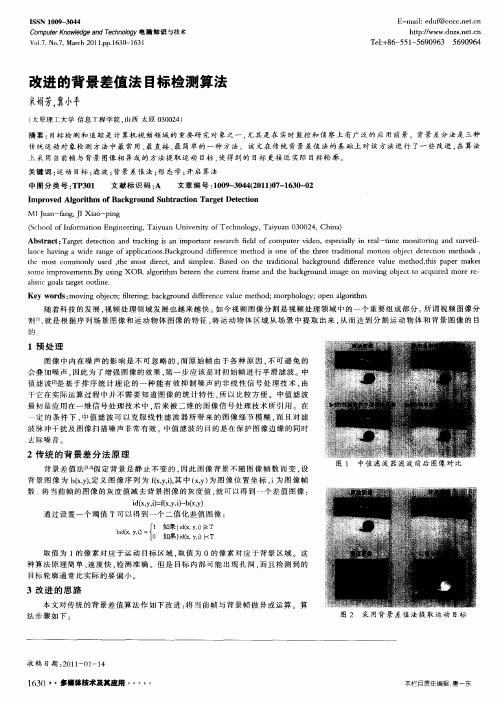
1预 处 理
图 像 中 内在 噪 声 的 影 响 是 不 可 忽 略 的 , 原 始 帧 由于 各 种 原 因 , 可 避 免 的 而 不 会 叠 加 噪 声 . 此 为 了增 强 图 像 的效 果 . 一 步 应 该 是 对初 始 帧 进行 平 滑 滤 波 。中 因 第 值 滤波 口 基 于 排 序 统 计 理 论 的一 种 能 有 效 抑制 噪声 的非 线性 信 号 处 理 技 术 , 】 是 由
A bsr c : r td tci n a r c n i a m pot n e e rh fed o o p e i o s cal n r a—tm e m o t rng a u v i— t a t Tage ee to nd ta kig s n i ra tr sa c l fc m utr vde ,epe il i e l i nio i y i nd sr el
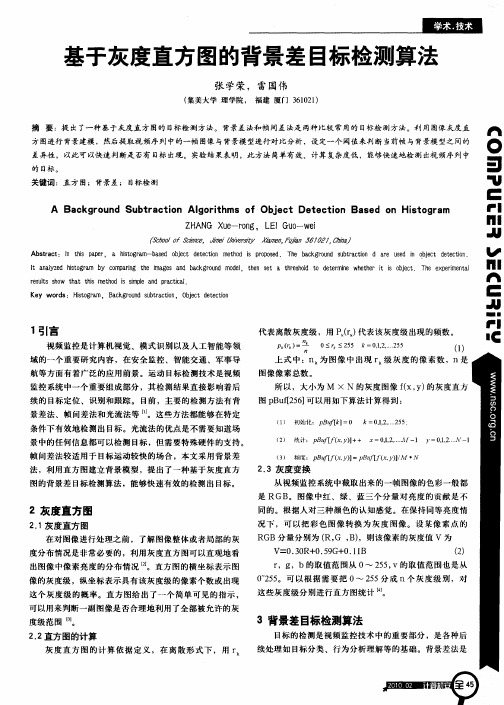
帧差法
帧差法近些年来, 世界各地的学者们针对视频图像中的运动目标检测与跟踪问题做了大量而深入的研究, 提出了很多极其有效的算法难点主要在于视频序列中有各种不同的干扰因素, 这些因素主要包括: 光线明暗的变化、成像传感器本身的固有噪声、运动目标自身的形变或位移变化、背景中的杂波、运动目标的互相遮挡或者自遮挡等, 这些问题还有待于做进一步的研究。
目前, 常用的运动目标检侧方法有: 光流法、背景差分法和帧间差分法。
1.光流法光流法能够检测出运动目标较完整的运动信息, 不需要预先知道场景的任何信息, 能够较好的处理运动背景的情况, 并且可以用于摄像机运动的情况, 适用于帧间位移较大的情况。
但是由于透明性、阴影、多光源、遮挡和噪声等原因,利用光流法进行运动物体检测时, 计算量很大, 无法保证实时性和实用性, 故难以应用到实时系统, 同时对噪声比较敏感, 计算结果精度较低, 难以得到运动目标的精确边界。
2 .背景差分法操作简单, 能够提供完全的特征数据, 但对目标的检测能力较低, 尤其对天气、光照等噪声的影响极其敏感,3T 为预先设定的阈值, 可根据经验选取T , 若选取过大, 则检测的目标则可能出现较大的空洞甚至漏检, 若T 选取过小, 将出现大量噪声。
由于帧间差分法的不足, 就有学者提出了三帧差法, 三帧差法充分考虑了动像素的时间相关性, 对动态检测比较灵敏, 对随机噪声也有很好的抑制作用,但也存在一定缺陷, 即差分图像的检测阈值需手动设定, 大多数情况下只能依据实践经验。
三帧差分法的关键是选取合适的阈值对图像进行二值化。
运动目标自动跟踪是指对目标进行连续的检测并确定其运动轨迹[1].在视频监控领域中,目标智能识别与自动跟踪系统是近几年来的研究重点.在军事、国防和工业等领域有着广泛的应用前景.当前运动目标的检测方法主要有3类:光流法[2]、帧间差分法[3]和背景差分法[4].背景差分法具有简单、运算速度快等诸多优点,使得该法作为运动目标检测的基本方法被普遍采用.但该法暴露出若干问题:一种是因外部条件引起的,如对光线的变化、噪声等造成差分图像检测精度不高,甚至失效;另一种是由差分图像法本身内在局限引起的,主要有空洞[5]、拖影,以及运动目标被拉长等现象.光流法[6]虽然能够适用于静态背景和动态背景两种环境,有较好的适应性,但是其计算复杂度高,运算时间开销很大,不能满足实时性的要求.帧差法[7]比较简单,实时性高,它主要包括减背景方法和相邻帧相减法,即三帧差分法.减背景方法存在背景获取困难、受光照影响严重且更新困难等问题.三帧差分法受光照和阴影影响较小.笔者对三帧差分法进行改进,提出了一种简单有效的运动目标检测方法.1 运动目标实时跟踪系统1. 1 帧差法的基本原理帧间差分法的基本原理就是将前后两帧图像对应像素点的灰度值相减,在环境亮度变化不大的情况下,如果对应像素灰度相差很小,可以认为此处物是静止的;如果图像区域某处的灰度变化很大,可以认为这是由于图像中运动物体引起的,将这些区域标记下来,利用这些标记的像素区域,就可以求出运动目标在图像中的位置.一般采用的帧差法是在连续的图像序列[8]中2个或3个相邻帧间采用基于像素的时间差分并且阈值化来提取图像的运动区域.该运动目标实时跟踪系统是采用三帧差分来进行运动目标检测,这种方法不仅能提高运动目标检测[9]的速度,而且提高了所检测运动目标图像的完整性.均值滤波均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标象素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
基于灰度直方图的背景差目标检测算法
( ) 频度: p u [ xy】 日 九f x.】^ Ⅳ 3 B ff(,)=p (,) + )/ ,
2 3灰度变换 .
从 视频 监控 系统 中截 取 出来 的一 帧图像 的色 彩一般 都 是 RGB。 图像 中红 、绿 、蓝 三个 分 量 对亮 度 的贡 献是 不 同 的。根 据人 对三 种颜 色 的认 知 感觉 。在保 持 同等亮 度情 况 下 ,可 以把 彩 色 图像 转换 为 灰 度 图像 。设 某 像 素 点 的
rs l so t a t i eut h w h t hs s me hd s i l a d rc i I to f mpe n pa tc . s a
K y wod : H tga e rs io rm, B c gon utat n betdtci s ak rudsbrci ,Ojc eet n o o
差异性 ,以此 可以快速判断是否有 目标 出现 。实验结果表明 ,此方法 简单有效、计算复杂度低 ,能够快速地检测 出视频序列 中
的 目标 。
关键词 :直方 图;背景差 ;目标检 测
A B c g o n u t a to g r h f 0be t D t c in B s d o it g a a k r u d S b r c in Alo i ms o j c e e to a e n H s o r m t
1 引言
视频监控是计算机视觉、模式识别以及人工智能等领
域 的一个 重要研 究 内容 ,在 安全 监控 、智能 交通 、军 事导
=
” O r 2 _ . …2 _e 5 < 5 o, 5 1 2
、, () 1
航 等方面 有着 广泛 的应 用前 景 。运动 目标检 测技 术是 视频 监控 系统 中一个 重要 组成 部分 ,其 检 测结果 直接 影 响着后
背景差分法

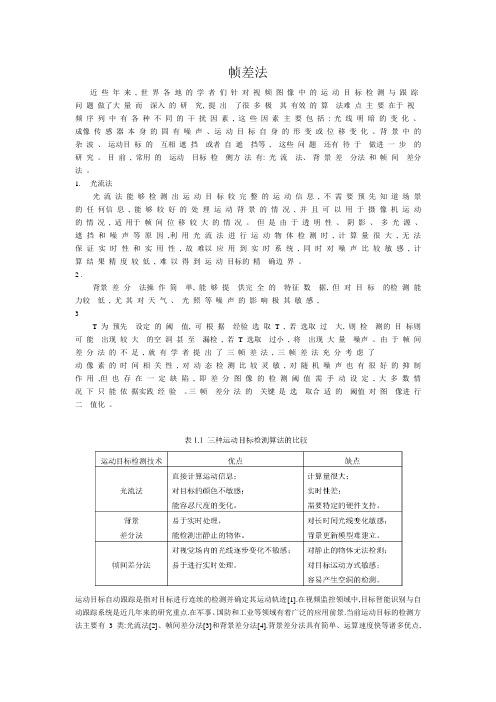
背景差分法又称背景减法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,这种方法较帧差法能更好的识别和提取运动目标,是目前运动分割中最常用的一种方法。
但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。
背景差分法法是静止背景下运动目标识别和分割的另一种思路。
如不考虑噪音n(x ,y ,t)的影响,视频帧图像I(x ,y ,t)可以看作是由背景图像b(x ,y ,t)和运动目标m(x ,y ,t)组成:(,,)(,,)(,,)I x y t b x y t m x y t =+ (4-14)由式(4-14)可得运动目标m(x ,y ,t):(,,)(,,)(,,)m x y t I x y t b x y t =- (4-15)而在实际中,由于噪音的影响,式(4-15)不能得到真正的运动目标,而是由运动目标区域和噪音组成的差分图像d(x ,y ,t),即:(,,)(,,)(,,)(,,)d x y t I x y t b x y t n x y t =-+ (4-16)得到运动目标需要依据某一判断原则进一步处理,最常用的方法为阈值分割的方法:(,,)(,,)(,,)0(,,)I x y t d x y t T m x y t d x y t T ≥⎧=⎨<⎩ (4-17)式中T 为一阈值,图4-1为背景差分法的流程图:图4-1 背景差分法的流程图背景差分法较帧差法更能准确地提取运动目标,帧差法如果不与其他方法进行结合只能提取运动变化区域(包括真正的运动目标、被覆盖和显露的背景)而不能直接提取运动目标。
然而,当我们运用背景减法时还要考虑很多问题:(1)要得到背景图像b(x,y,t),最简单的方法就是将第一帧没有运动目标的图像帧作为背景图像。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
背景差法是3种
方法中最直接、最简单的一种方法.这种方法事先把背景图像存储下来,然后将前景图像与背景图像作差.一般情况下,由于运动物体在灰度上与背景灰度存在着很明显的差异,这样作差过后的差值图像只是在运动物体出有较大的灰度值.选取适当的阈值,差值图像的灰度值大于,视为前景物体,灰度值小于,视为背景点.运用背景差法通常会遇到背景的获取背景的更新和背景的扰动
1 问: Pluto对波长650纳米的激光校准,即上载一幅灰度值在0-255之间的图,施加的相位调制对应在0-2pi之间。
如果改用波长532纳米的激光,上载灰度值范围为多少时,可以达到0-2pi 之间的相位调制。
答: 若改用532nm激光,相位调制范围比650nm会大些。
一般来说,SLM相位调制范围在短波长上会增加。
2 问: LC-R2500等型号对微机系统有什么具体要求?
答: 目前的PC配置一般都能满足要求.
3 问: 说明书中提到相位校准过程中要加入起偏器和检偏器,请问SLM使用中是否要还要加入起偏器和检偏器?
答: 正常使用中也需要加入起偏器和检偏器。
并且,一般要求起偏器的偏振方向与SLM微显示板的长边方向一致,基本不影响入射偏振态,达到只改变相位的目的。
4 问: 入射光束和SLM法线的夹角有何限制,最大夹角大约为多少?
答: 入射角度一般控制在6度以内,对相应偏振光的影响较小。
5 问: SLM调制时有时中心光斑仍比较强,导致衍射效果变差,请问何种原因?如何消除?
答: 一般来说,衍射效果受填充因子和入射偏振态影响。
使用中,应通过插入起偏器和检偏器来消除非相干光的影响。
6 问: Holoeye空间光调制器使用中应注意哪些问题?
答: 一、防静电措施,特别是安装液晶显示面板时,应带防静电手套,防静电手腕;二、液晶显示面板与控制器之间的连线,应避免频繁插拔;三、空间光调制器部件的连接,应在断电状态下进行;四、使用环境,应避免高温、高湿,并保证一定的洁净度。
7 问: Holoeye空间光调制器能否用于脉冲光?
答: Holoeye空间光调制器可用于飞秒脉冲整形,具体损伤阈值取决于脉冲能量,重复频率、光斑大小等。
一般连续光功率密度为2W/cm2,制冷状态下可承受更高功率。
8 问: Pluto系列的响应时间?
答: VIS: ~25ms;NIR: ~30ms;TELCO:~ 40ms。
9 问: SLM Pluto和HEO 1080P的区别?
答: Pluto与1080P采用相同的液晶显示面板,但Pluto的控制器体积小,是厂家改进的型号。
而HEO1080P多应用于多通道
1.控制空间光调制器程序
通过Read Bmp File函数读取波前校准图片与待输入相位图片的灰度值,然后相加,对256取余,再乘以216/256,将灰度值局限在0-216之间(对于型X10468-03的空间光调制器)。
由于Read Bmp File读取的结果为一维数组,而空降光调制器控制器响应的是像素为792*600的灰度图片,因此需要将一维数组转化成二维
792*600的数组。
另外,其中用到一个重要的函数——库调用函(callalibrary),它的功能是调用向空间光调制器液晶显示器送图的动态数据链接库second_mon. dll,将我们编写的程序与实际硬件对应起来,即驱动空间光调制器工作,实现实
时的向空间光调制器的控制器上输送图片。
3.衍射计算程序
夫浪和费衍射计算实现的是/7
,与第四章中的式(4. 11)相对应。
式中的正是指打在SLM液沾头上的光强分布(高斯分布),W。
讲0为光斑半径。
(Pr 即程序中的phase data,也就楚我们要|(ij空N光调制器上输送的调制相位;那么,实际上就是经SLM反射调制后的液
晶平面处Wo的光场分布,是随机的相位分布,即产生了赝热光场。
在图附录4的程序框图中,用FFT功能函数实现了傅里叶变换的运算,由于6乂卩(-^^^5^)广'11’力是一个二维的复数,因此需要用到2D complex FFT函数。
其中的■指的是直流部分是否在中心,选择T即在中心。
其中的[)AQ助手是与硬件的数据?采集卡进行匹配,然后釆集。
为
了减少测量误差,对每一个光强值进行30次重复测量再取平均,用到了for循环和
移位寄存器。
For循环实现重复执行其框图屮的程序;移位寄存器(Shift Register)
常与for循环结合起來使用,它由循环边框上相应的一对端子來表示,右边的端子
存储一次循环完成后的数据,在本次循环完成之后这些数据被转移到左边的端子,
赋给下一次循环。
附录图5中的程序就是用移位寄存器将30个数据进行相加,存储,
然后取平均。
另外,采集到的数据可以用Write To Spreadsheet File VI存在硬盘
」、方便以后分析。
空间光调制器鬼成像的整个过程如下:首先成像的第一步(如附录图6),产生20000幅随机相位图片,连续送给SLM,并对每幅图进行衍射计算然后存储,以便后续完成关联计算;成像的第二步:连续采集透过成像物体的总光强并进行存储(如附录图7);成像的第三步:将前两步中分别存储的夫玻和费衍射结果和采集到的光强值根据式(4.12)进行关联计算(如图附录8)。
成像这三步是有序执行的,因此,我们用了顺序结构保证这三步完整有序的完成。