高光谱遥感数据处理基础
高光谱遥感影像处理流程

高光谱遥感影像处理流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!高光谱遥感影像处理流程。
1. 辐射校正,去除传感器和大气造成的辐射失真,恢复影像真实的辐射亮度值。
高光谱遥感
高光谱遥感器
OMIS系统部分参数 128波段 波段 波长 光谱分辩率 64(64,32,16) 0.4-1.1um 10nm 16(8,1) 1.1-2.0um 60nm 32(32,1) 2.0-2.5um 15nm 8(8,1) 3.0-5.0um 250nm 8(8,1) 8.0-12.5um 500nm IFOV 3.0,1.5mrad FOV > 70 degree
VNIR: 32 波段 (0.44~1.08um) 光谱分辨率: 20nm SWIR: 32 波段 (1.5~2.45um) 光谱分辨率: 25nm TIR: 7 波段 (8.0~11.6) 光谱分辨率: 0.45um IFOV: 3.0mrad FOV: 90 degree scanning : 10-20(line/second) digitizer: 12bit
高光谱遥感的基本概念
高光谱遥感起源于20世纪70年代初的多光谱遥 感,它将成像技术与光谱技术结合在一起,在对目标 的空间特征成像的同时,对每个空间像元经过色散 形成几十乃至几百个窄波段以进行连续的光谱覆 盖,这样形成的遥感数据可以用“图像立方体”来形 象的描述.同传统遥感技术相比,由于其所获取的图 像包含了丰富的空间,辐射和光谱三重信息。
2 5.0 表 1.1,国际上部分成像光谱仪一览表(陈述彭等,1997) 500-980 32 2 0.0-71.0
遥感器 PLI-PMI CASI SFSI AIS-1 AIS-2 AVIRIS (20km) ASAS 改进 ASAS GERIS
光谱范围 (nm) 403-805 430-870 1200-2400 900-2100 1200-2400 800-1600 1200-2400 400-2450 455-873 400-1060 400-100 1000-2000 2000-2500
envi高光谱数据处理流程
envi高光谱数据处理流程
envi高光谱数据处理流程是一种非常常用的数据处理方法,主要应用于高光谱遥感数据处理。
其主要流程包括:数据预处理、光谱反射率计算、特征提取与分类等几个步骤。
1、数据预处理:数据预处理包括数据校正、波长校准及大气校正等过程。
其中,数据校正主要是将数据进行去背景、去噪、去影响等处理。
波长校准是将采集到的数据进行波长校准,保证数据的准确性。
大气校正是将采集的数据进行大气校正,降低大气对数据的影响。
2、光谱反射率计算:光谱反射率计算是将采集到的数据进行转换,得到地表反射率信息。
这个过程主要通过将采集到的数据进行比对处理,计算出地表反射率。
3、特征提取:特征提取是将采集到的数据进行特征分析,得到地物分类信息。
这个过程主要通过对采集到的数据进行分析,计算出每个波段的特征,然后根据这些特征进行分类。
4、分类:分类是将采集到的数据进行分类,识别出地表不同的类别。
这个过程主要通过将采集到的数据进行分析,然后根据不同的特征进行分类,最终得到地表不同的类别。
总之,envi高光谱数据处理流程是一个比较全面、细致的数据处理方法,可以有效地对高光谱遥感数据进行处理,得到准确的地表信息。
- 1 -。
ENVI高光谱数据处理流程
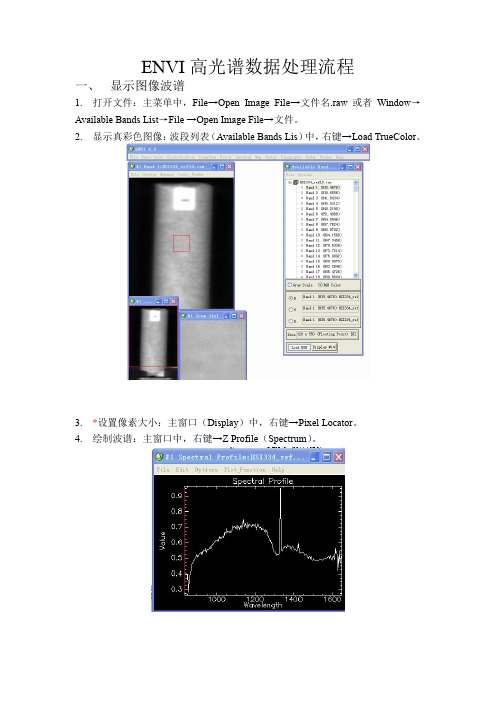
ENVI高光谱数据处理流程一、显示图像波谱1.打开文件:主菜单中,File→Open Image File→文件名.raw或者Window→Available Bands List→File →Open Image File→文件。
2.显示真彩色图像:波段列表(Available Bands Lis)中,右键→Load TrueColor。
3.*设置像素大小:主窗口(Display)中,右键→Pixel Locator。
4.绘制波谱:主窗口中,右键→Z Profile(Spectrum)。
5.收集任意点波谱:Spectral Profile中,Options→Collect Spectra,点击图像任6.光谱平滑:Spectral Profile中,Options→Set Z Profile Avg Window,将window7.部分光谱:主菜单→Basic Tools→Resize Data(Spatial/Spectral)→Spectral Subset,选择需要的光谱波段。
生成新的文件,右键→Load True Color to<new>。
显示新图像。
8.关闭所有文件:File→Close All Files。
二、标准波谱库主菜单→Spectral→Spectral Libraries→Spectral Library Viewer→安装文件夹下,ITT\IDL\IDL80\products\envi48\spec_lib。
共有usgs_min、veg _lib、jpl_lib、jhu_lib四个标准波谱库。
在Spectral Library Viewer中,单击波谱名称,自动显示波谱。
三、自定义波谱库1.输入波长范围:在菜单中,Spectral Spectral Library→Spectral Library Builder2.波谱收集:以从影像数据中收集波谱为例:a)打开高光谱图像,收集任意点波谱。
无人机机载高光谱数据获取与处理技术规程
无人机机载高光谱数据获取与处理技术规程
无人机机载高光谱数据获取与处理技术规程是指在无人机平台上获取和处理高光谱遥感数据的一系列操作规范和流程。
以下是相关的技术规程:
1. 无人机选择和配置:根据实际需求选择适当的无人机平台,确保其具备足够的载荷容量和稳定性,以便携带高光谱遥感仪器。
2. 高光谱遥感仪器选择与安装:选择适当的高光谱遥感仪器,确保其性能符合实际需求,并进行正确的安装和校准。
3. 飞行计划与路径规划:根据研究区域和目标确定飞行计划,并进行飞行路径规划,包括飞行高度、航线间距等参数的确定。
4. 飞行操作与数据采集:进行无人机的起飞、飞行控制和降落操作,在飞行过程中采集高光谱数据,并确保数据的质量和完整性。
5. 数据预处理:对采集到的高光谱数据进行预处理,包括数据格式转换、去噪、校正等步骤,以提高数据质量。
6. 数据处理与分析:对预处理后的高光谱数据进行处理和分析,包括光谱特征提取、分类与识别等,以获取感兴趣的地物信息。
7. 数据存储与管理:对处理后的数据进行存储和管理,包括建立数据库、数据备份等,以便后续的数据共享和利用。
8. 结果报告与应用:根据实际需求,将处理后的数据结果整理成报告或图像,用于科研、决策等领域的应用。
这些技术规程的目的是确保无人机机载高光谱数据获取与处理的科学性和规范性,提高数据质量和效率,并促进相关领域的研究和应用。
环境遥感科学中的高光谱数据处理与分析

环境遥感科学中的高光谱数据处理与分析高光谱数据是环境遥感科学中一种重要的数据源,具有丰富的光谱信息,可以提供大量的物质特征和光谱反射率数据。
高光谱数据处理与分析是环境遥感科学中的一个关键步骤,它可以帮助我们深入理解地球表面的环境状况,监测环境变化,并提供支持环境保护、资源管理和气候变化研究的科学依据。
本文将介绍高光谱数据处理与分析的基本方法和技术,并探讨其在环境遥感科学中的应用。
高光谱数据处理的主要目标是从原始数据中提取有用的信息。
在高光谱数据处理过程中,我们需要进行数据预处理、特征提取和分类等步骤。
首先,数据预处理是高光谱数据处理的第一步,它的主要目的是消除数据中的噪声和杂散信息,提高数据质量。
数据预处理包括大气校正、辐射校正和几何校正等。
大气校正能够消除大气传输的影响,使得地表反射率数据更加准确。
辐射校正可以消除太阳辐射的影响,得到物体的真实辐射率数据。
几何校正则用于减少图像变形和畸变,使图像和数据能够准确地对应。
特征提取是高光谱数据处理的关键步骤之一,它可以从高光谱数据中提取出地物的光谱、空间和时间特征。
特征提取是确定地物种类和状态的重要手段,对于环境遥感科学的研究具有重要意义。
常用的特征提取方法包括主成分分析(PCA)、线性判别分析(LDA)和光谱指数等。
主成分分析是一种常见的无监督特征提取方法,能够通过线性变换将高维的高光谱数据转化为低维的主成分影像,保留了原始数据中的主要信息。
线性判别分析则是一种有监督的特征提取方法,它通过寻找线性变换,使得不同类别的地物样本在新的特征空间中更加分散,提高了分类的准确性。
分类是高光谱数据处理的最终目标,它利用提取的特征将地物进行分类,帮助我们了解地表环境的类型和分布。
分类方法可以分为监督分类和非监督分类。
监督分类需要事先准备好地物样本,通过训练分类器来实现对新数据的分类。
常用的监督分类方法有最大似然分类、支持向量机(SVM)和随机森林等。
非监督分类则是在没有事先准备地物样本的情况下,将像素按相似度进行聚类,常用的非监督分类方法有K-means聚类算法和自组织映射等。
高光谱遥感资料处理方法与数据融合
高光谱遥感资料处理方法与数据融合高光谱遥感技术是一种获取地球表面物质光谱信息的重要手段,其应用广泛,如农业、环境监测、地质勘探等领域。
然而,高光谱数据量大、维度高、处理复杂,因此需要有效的处理方法与数据融合技术来提取有价值的信息。
高光谱遥感资料处理方法主要包括预处理、特征提取、分类与解译等几个步骤。
首先,预处理是为了去除噪声、校正辐射、减少大气效应等,以确保数据的准确性。
在预处理过程中,常用的方法有大气校正、波段选择、空间和时间滤波等。
特征提取是高光谱资料处理的核心环节,目的是从大量的光谱数据中提取出目标物体的特征,以便进行分类与解译。
常用的特征提取方法包括主成分分析(PCA)、线性判别分析(LDA)、小波变换等。
PCA通过线性组合将高维的原始光谱数据转换为低维的主成分变量,以达到减少数据维度、保留重要信息的目的。
LDA是一种监督方法,它可以通过最大化类别内的散度和最小化类别间的散度来提取判别信息。
小波变换则可以将光谱信号分解为不同尺度的频域成分,从而更好地表达光谱特征。
分类与解译是高光谱遥感图像处理中的重要环节,它可以通过将像素分为不同的类别或解释对象,以获得对地物的识别与定量分析。
在分类过程中,常用的方法有最大似然法、支持向量机、人工神经网络等。
最大似然法基于统计模型,通过计算概率分布最大的类别来进行分类。
支持向量机是一种基于统计学习的分类方法,它通过寻找一个最优的超平面将数据集分割为不同的类别。
人工神经网络则模拟人脑神经元的运作规律,通过多层神经元的连接来进行模式识别和分类。
除了高光谱遥感资料的处理方法,数据融合也是高光谱遥感技术中的关键环节之一。
数据融合是将来自不同传感器的遥感数据进行整合,以获得更全面、准确的信息。
常用的数据融合方法有基于物理模型的融合和基于统计方法的融合。
基于物理模型的融合是通过数学模型和物理原理将不同传感器的观测分量融合,以得到具有更高空间分辨率和光谱分辨率的数据。
高光谱遥感介绍:基础、数据与应用

高光谱遥感的本质及本质特征
物质运动规律,能量传递及信息记载 时空不确定性及对策 表达 多光谱与高光谱
本质及本质特征
• 一个表达式
D=F(P1,P2,…Pj;E1,E2,…,Ei)
遥感数据D,对象属性Pj,遥感响应过程及物质对象运动机理 F,环境因 素Ei: 在样的表达下,遥感数据技术的本质就是基于遥感原理性认识 F,利用获得D来反演P或E并进行应用,其中:
Change with location and time
Should be removed (Correction & Calibration)
Should to do temporal, geometry registration
应用及应用的理论基础
第1个用途—定性
λ
120 y = -0.2033x 2 + 10.164x 100 80 60 X
“高光谱遥感”的要素
• 传感器
高光谱传感器、成像原理与成像模式
两大类 多种分光方式 调制方式 关于传感器的分类 关于传感器的术语
“高光谱遥感”的要素
• 目标与环境 • 难点:时空不确定性 • 优点:
1
1
1
0.8
0.8
0.8 0.6 0.4
Cabbage
Reflectan ce
Lettuce
HS179.3B SMR-13.a SMR-13.b SMR-13.c SMR-13.d SMR-13.e
遥 感 信 息 :定 性 、定 量 的 对 象 属 性
Natural sea bottom Terrain effect liquid-solid surface
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
泛函分析概括
高光谱遥感应用中,如何度量光谱间的相似性一直高光谱图象处理的核心问题,因而我们有必要先交代下度量空间的一些概念。
度量空间:所谓度量空间,就是指对偶(,)X d ,其中X 是一个集合,d 是X 上的一个度量(或X 上的距离函数),即d 是定义在X X ⨯上且对所有,,X ∈x y z 满足以下四条公理的函数:
(1) d 是实值、有限和非负的。
(2) 当且仅当=x y 时,(,)0d =x y 。
(3) (,)(,)d d =x y y x (对称性)。
(4) (,)(,)(,)d d d ≤+x y x z z y (三角不等式)。
度量空间给出来空间中元素“距离”的度量,因而使得空间中的元素可比较。
但是,仍需要在空间中引入代数结构,使得元素之间可进行代数运算。
因而,这里需要引入线性空间。
线性空间:所谓域(K R 或C)上的线性空间是指一个非空集合X ,且其元素,,x y (称为矢量)关于X 和K 定义了两种代数运算。
这两种运算分别叫做矢量的加法与标量的乘法。
矢量的加法是,对于X 中的每一对矢量(,)x y ,与其相联系的一个矢量+x y ,叫做矢量之和。
按这种方式它还具有下述性质:矢量加法是可交换的和可结合的,即对所有矢量都有
()()+=+++=++x y y x x y z x y z
此外存在零矢量,X ∈0并对每个矢量x ,存在有-x ,使得对一切矢量有
()+=+-=x 0x x x 0
矢量与标量的乘法是,对于每个矢量x 和每个标量α,与其相联系的一个矢量αx ,叫做α与x 之积。
按这种方式对一切,x y 和标量,,αβ具有
()()1αβαβ==x x
x x
和分配律
()()ααααβαβ+=++=+x y x y x x y
在很多情况下因为线性空间X 上定义了度量d ,所以X 同时也是一个度量空间。
然而,如果X 的代数结构与度量没有什么关系的话,我们就不能指望把代数的概念和度量的概念结合在一起。
为了保证X 的代数性质与几何性质有如此的关系,我们首先需要引入一个辅助的所谓“范数”的概念,其中要用到线性空间的代数运算。
然后再用范数诱导出我们希望的度量d ,这一想法就导出了赋范空间的概念。
简单的说,赋范空间把线性空间的代数结构和其作为度量空间的度量紧密结合在一起。
赋范空间:所谓赋范空间X ,就是指在其上定义了范数的线性空间X 。
而所谓线性空间X 上的范数,就是指定义在X 上的一个实值函数,它在X ∈x 的值记为x ,并且具有如下性质:
(1)0≥x
(2)0=⇔=x x 0
(3)αα=x x
(4)+≤+x y x y
其中,x y 是X 中的任意矢量,α为任意标量。
巴拿赫空间:所谓巴拿赫空间就是完备的赋范空间(这里的完备性是按范数定义的度量来衡量的,见下面公式)
(,)d =-x y x y ,X ∈x y
此度量叫做由范数所诱导的度量。
由范数所诱导的度量具备以下基本性质:
引理(平移不变性):在赋范空间X 上,由范数诱导的度量d ,对所有的,X ∈x y 及每个标量α,都满足
(,)(,)
(,)(,)d d d d ααααα++==x y x y x y x y
在赋范空间中和初等线性代数一样,可以对矢量进行相加和标量相乘的运算。
此外空间上的范数推广了矢量长度的概念。
而希尔伯特空间则把矢量的内积引入到线性空间中来,使得空间中的元素具有正交性。
内积空间:所谓内积空间就是在其上定义了内积的线性空间X 。
这里所指的X 上的内积,是X X ⨯到X 的标量域K 的一个映射;也就是说针对X 中的每一对矢量,x y ,都有一个标量,记之为,<>x y 与之对应。
这个标量叫做x y 和的内积,并且对所有的矢量,,X ∈x y z 和标量α,都满足
(1),,,<+>=<>+<>x y z x z x y
(2),,αα<>=<>x y x y
(3),,<>=<>x y y x
(4),0,,0<>≥<>=⇔=x x x x x 0
希尔伯特空间:所谓希尔伯特空间就是完备的内积空间(以内积所定义的度量来考察完备性,见下面公式)。
X 上的内积通过
=x , (,)d =-x y x y 分别在X 定义了范数和度量。
因此,内积空间是赋范空间,而希尔伯特空间是巴拿赫空间。
但并不是所有的赋范空间都是内积空间,因为并不是所有的范数多可以由内积来得到,可以证明内积空间上的范数满足重要的平行四边形等式:
22222()++-=+x y x y x y
由于高光谱遥感图象的特征空间为有限维欧几里德空间,我们这里给出其性质。
欧几里德空间n R :空间n R 具有内积
1122,n n x y x y x y <>=+++x y (1.1.1)
的希尔伯特空间,其中12(,,,)n x x x =x ,12(,,
,)n y y y =y 。
由此内积可以诱导
出范数
112222212,()n x x x =<>=+++x x x 由此得到欧几里德度量
1
22211(,)[()()]n n d x y x y =-=-++-x y x y (1.1.2) 常用的相似性度量主要有: (1) 欧几里德距离: 1
22211[()()]n n d x y x y =-=-+
+-xy x y (2) 内积: 1122,T n n x y x y x y <>==+++x y x y (3) 角度: cos T ar θ=x y x y
(4) 相似系数: cos T θ=x y x y
(5) 相关系数: ()()T
r μμμμ--=--x y xy x y
x y x y
(6) 绝对距离: 1
n i i i d x y ==-∑xy
(7) 明斯基距离: 11[]n q q i i i d x y ==-∑xy
(8) 切比雪夫距离: 1max i i i n
d x y ≤≤=-xy 在上面的度量公式中,欧氏距离与内积相协调,共同构成欧氏空间度量元素相似性的基础。
角度、相似系数和相关系数都可以由欧氏距离与内积派生而来。
绝对距离、明斯基距离和切比雪夫距离虽然均可以由相应范数诱导,但却不能由内积诱导,因而在没有特殊先验知识的情况下,这些度量仅在理论上有存在的必要。