四轴飞行器控制电路详解
四轴 原理

四轴原理
四轴原理即为四旋翼飞行器的工作原理。
四旋翼飞行器由四个相对对称的旋翼组成,每个旋翼都由一个电动机驱动,并通过控制电路进行精确的调节。
四轴飞行器的飞行原理是通过对四个旋翼的转速进行精确控制,实现悬停、上升、下降、前进、后退、向左、向右平移以及旋转等多种飞行动作。
具体原理如下:
1. 升力平衡原理:四个旋翼产生的升力将飞行器维持在空中,飞行器的重力与升力平衡,实现悬停状态。
2. 空气动力学平衡原理:四个旋翼的转速可以通过电机转速控制器进行精确调节,进而调节各个旋翼产生的升力大小,实现空气动力学平衡。
3. 控制算法原理:通过搭载的传感器(如加速度计、陀螺仪、磁力计等)实时监测飞行器的姿态信息,将监测到的数据传输给飞行控制器。
飞行控制器根据姿态信息计算出相应的控制指令,通过电调调节四个旋翼的转速,控制飞行器的姿态。
如需向前飞行,则增加后面两个旋翼的转速,减小前面两个旋翼的转速,使飞行器倾斜向前。
类似地,对其他方向的飞行也是通过对相应旋翼转速的调节实现的。
4. 电源与电路原理:四轴飞行器通过电池为电动机提供能量,电路控制系统将飞行器的控制信号转化为电流和电压输出供电给电动机。
通过对四个旋翼的转速进行精确控制,在合适的气动力学平衡和姿态控制下,四轴飞行器能够实现精确悬停、稳定飞行及各种飞行动作,具有广泛的应用前景。
基于STM32四轴飞行器电路设计的详细图解资料概述

基于STM32四轴飞行器电路设计的详细图解资料概
述
四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器。
进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。
四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。
四轴飞行器的平衡控制系统由各类惯性传感器组成。
在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优势所在,而且相较于固定翼飞机,四轴也有着可垂直起降,机动性好,易维护等优点。
系统方案
本设计采用STM32F4作为核心处理器,该处理器内核架构ARM Cortex-M4,具有高性能、低成本、低功耗等特点。
设计总体框图。
六个自由度的四旋翼飞行控制原理
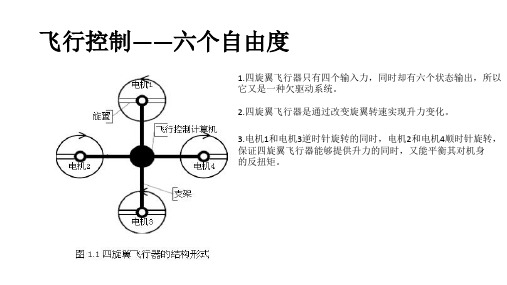
1.四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以 它又是一种欠驱动系统。 2.四旋翼飞行器是通过改变旋翼转速实现升力变化。 3.电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转, 保证四旋翼飞行器能够提供升力的同时,又能平衡其对机身 的反扭矩。
机载端控制电路版开发
• 红外接收装置——接收到发射装置的信息传递给单片机。
• 中央处理——单片机将接收到的红外信息处理,发送到PWM装置, 控制发动机的转速改变。
动力电路开发(PWM控制电流装置)
PWM电流控制电路: 每个PWM控制 器由一组电桥、及其外部一个感应电 阻(Rs)、一个内部比较器和一个单 稳多谐振荡器组成,来独立感应和控 制输出电流。
红外线接收器(接收信号)
反馈
单片机(中央处理)
PWM 步进电机(改变电流大小)
电机(转速改变) 飞行动作 轨道偏移外部扰动来自遥控电路开发(红外线装置)
• 四通道遥控器——上下、左右、前后、旋转 • 红外遥控装置——开关键,上升下降键,方向前后左右键。 (开关键:开启时,转速与飞行器重力刚好抵消,处于悬停 状态。关闭时,转速为零,处于停止状态。)
输出电流的逻辑控制:两个输入逻辑信号(l0 和 I1)用于数 字选择电机线圈电流在其最大水平的百分比,100%, 67%, 33%, or 0%。0%的输出电流值说明电桥关闭了所有驱动并且 也作为一个输出特性。
外界干扰因素
• 1.传感器噪声 • 2.外部扰动 • 3.摩擦 • 4.风速
R5F100LE控制的四旋翼自主飞行器,含原理图、程序

式 1-1
y
z ]T 为四旋翼飞行器在导航坐标系下的线位移, [ x y z ]T 为运动加速度,m
为飞行器质量, , , 分别为机体的偏航角、俯仰角和横滚角,l 为旋翼面中心到四旋翼飞行 器质心的距离,I X , IY , I Z 为轴向惯性主矩。该动力学模型对四旋翼飞行器的真实飞行状态进 行了合理的简化,忽略了空气阻力等对系统运行影响较小的参数,使得飞行控制算法更加简 洁。 2.2 PID 控制算法结构分析 在动力学模型的基础上,将小型四旋翼飞行器实时控制算法分为两个控制回路,即位置
其中, xd , yd , zd 为航姿参考系统测量到的加速度积分得到的位移量。
1.2 电机的选择与论证
四旋翼无人飞行器是通过控制四个不同无刷直流电机的转速,达到控制四旋翼无人飞行 器的飞行姿态和位置,与传统直升机通过控制舵机来改变螺旋桨的桨距角,达到控制直升机 的目的不同。在电机的选型上,主要有直流有刷电机和直流无刷电机两种。 方案一:直流有刷电机是当前普遍使用的一种直流电机,它的驱动电路简单、控制方法 成熟,但是直流有刷电机使用电刷进行换向,换向时电刷与线圈触电存在机械接触,电机长 时间高速转动使极易因磨损导致电气接触不良等问题,而且有刷电机效率低、力矩小、重量 大,不适合对功率重量比敏感的电动小型飞行器。 方案二:直流无刷电机能量密度高、力矩大、重量轻,采用非接触式的电子换向方法, 消除了电刷磨损,较好地解决了直流有刷电机的缺点,适用于对功率重量比敏感的用途,同 时增强了电机的可靠性。
-2-
所以选择直流无刷电机作为动力源。
1.3 电机驱动方案的选择与论证
方案一:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。但是电阻 网络只能实现有级调速,而数字电阻的元器件价格比较昂贵。更主要的问题在于一般电动机 的电阻很小,但电流很大;分压不仅会降低效率,而且实现很困难。 方案二:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调 整。这个方案的优点是电路较为简单,缺点是继电器的响应时间慢、机械结构易损坏、寿命 较 短、可靠性不高。 方案三:采用全桥驱动 PWM 电路。这种驱动的优点是使管子工作在占空比可调的开关状 态,提高使用效率实现电机转速的微调。并且保证了可以简单的方式实现方向控制。 基于上述理论分析,选择方案三。
四轴(多轴)飞行器概述

四轴(多轴)飞行器概述一、简介四轴(多轴)飞行器也叫四旋翼(多旋翼)飞行器它有四个(多个)螺旋桨,四轴(多轴)飞行器也是飞行器中结构最简单的飞行器了。
前后左右各一个,其中位于中心的主控板接收来自于遥控发射机的控制信号,在收到操作者的控制后通过数字的控制总线去控制四个电调,电调再把控制命令转化为电机的转速,以达到操作者的控制要求,前后马达是顺时针转动,需要安装反桨,左右马达是逆时针转动,需要安装正桨,机械结构上只需保持重量分布的均匀,四电机保持在一个水平线上,可以说结构非常简单,做四轴的目的也是为了用电子控制把机械结构变得尽可能的简单。
二、控制原理四轴飞行器的控制原理就是,当没有外力并且重量分布平均时,四个螺旋桨以一样的转速转动,在螺旋桨向上的拉力大于整机的重量时,四轴就会向上升,在拉力与重量相等时,四轴就可以在空中悬停。
在四轴的前方受到向下的外力时,前方马达加快转速,以抵消外力的影响从而保持水平,同样其它几个方向受到外力时四轴也是可以通过这种动作保持水平的,当需要控制四轴向前飞时,前方的马达减速,而后方的马达加速,这样,四轴就会向前倾斜,也相应的向前飞行,同样,需要向后、向左、向右飞行也是通过这样的控制就可以使四轴往我们想要控制的方向飞行了,当我们要控制四轴的机头方向向顺时针转动时,四轴同时加快左右马达的转速,并同时降低前后马达的转速,因为左右马达是逆时针转动的,而左右马达的转速是一样,所以左右是保持平衡的,而前后马达是顺时针转动的,但前后马达的转速也是一样的,所以前后左右都是可以保持平衡,飞行高度也是可以保持的,但是逆时针转动的力比顺时针就大,所以机身会向反方向转动,从而达到控制机头的方向。
这也是为什么要使用两个反桨,两个正桨的原因。
三、电调我们平时用的商品电调是通过接收机上的油门通道进行控制的,这个接收机出来的控制信号一般都是20mS 间隔的PPM脉宽控制信号,而四轴为了提高响应的速度,需要控制命令的间隔更短-比如说5mS,所以就需要特殊的电调而不能用普通的商品电调,但是为什么要使用I2C总线跟电调连接呢,这个跟电路设计以及软件编写等有关,I2C总线在硬件连接上可以多个设备直接并连在总线上,它有相应的传输机制保证主机与各个从机之前顺畅沟通,这样连接就比较的方便,所以四个电调的控制线是并接在一起连到主控板上就可以了,这个也跟我们选用的芯片相关,很多单片机都有集成I2C总线的,软件设计起来也得心应手。
全球最小四轴飞行器Crazyflie电路部分详解

全球最小四轴飞行器Crazyflie电路部分详解上网日期: 2016年02月16日Crazyflie是目前全世界最小的四轴飞行器,仅重19克,相对的两翼之间长度为9厘米。
有两个不同的版本,区别在于传感器的数量。
这个小四轴飞行器可以在空中飞行长达7分钟,通过一个标准的USB接头给锂聚合物电池充电需要约20分钟。
它的电路部分到底是如何实现的?且听我慢慢道来。
1. 电气原理从中心开始:72M主频的M3内核的处理器来处理各传感器数据,并对四个旋翼进行控制达到想要的效果。
往上:通过IIC接口与三轴陀螺仪、三轴加速度计(也就是MPU6050)、磁力计、气压计等传感器连接获取传感器数据,来感知载体(也就是四轴机体)的姿态(这里的姿态包括俯仰、横滚、航向)和高程。
往下:通过PWM调节四个电机驱动器来驱动四个电机转动,由于电机带有螺旋桨转动而产生所谓的“升力”。
往右:通过SPI协议接口与无线芯片通讯,回传载体数据和接收控制信号,还有外部扩展接口。
往左:电源管理部分。
2. 电池电池使用的是锂电池(锂离子聚合物电池),是目前流行的遥控模型电池。
但锂电池必须按照规定使用,过冲、过放都会产生安全隐患。
由于它具有最高的电能/质量比和最大的放电电流,所以也是比较适合的选择。
为了应付锂电池的这些缺点,我们使用电路保护模块(PCM)来防止电量不足、过放电或者短路。
PCM 位于电池上部的橙色胶带下面,从中引出两条电源线。
但是这种保护是远远不够的,还需要有专门的充放电管理电路来保护。
比如电气原理图的Power Mangment and Charging部分。
PCM 的参数如下:3. 电源管理电源管理主要是由TI BQ24075 电源管理芯片来完成。
它能开/关和给锂电池充电。
BQ24075有三种输入限制模式,100mA,500mA和用户自定义(Crazyflie设置740mA)。
当将Crazyflie 接上普通电源适配器时就可以使它能快速的充电。
四轴飞行器飞行原理与双闭环PID控制

四轴飞行器是微型飞行器的其中一种,相对于固定翼飞行器,它的方向控制灵活、抗干扰能力强、飞行稳定,能够携带一定的负载和有悬停功能,因此能够很好地进行空中拍摄、监视、侦查等功能,在军事和民用上具备广泛的运用前景。
四轴飞行器关键技术在于控制策略。
由于智能控制算法在运行复杂的浮点型运算以及矩阵运算时,微处理器计算能力受限,难以达到飞行控制实时性的要求;而PID控制简单,易于实现,且技术成熟,因此目前主流的控制策略主要是围绕传统的PID控制展开。
1 四轴飞行器的结构与基本飞行原理四轴飞行器结构主要由主控板和呈十字交叉结构的4个电子调速器、电机、旋浆组成,电机由电子调速器控制,主控板主要负责解算当前飞行姿态、控制电调等功能。
以十字飞行模式为例,l号旋翼为头,1、3号旋翼逆时针旋转,2、4号旋翼顺时针旋转,如图1所示。
图1 四轴飞行器结构图参照飞行状态表1变化电机转速,由于四个电机转速不同,使其与水平面倾斜一定角度,如图l所示。
四个电机产生的合力分解为向上的升力与前向分力。
当重力与升力相等时,前向分力驱动四轴飞行器向倾斜角度的方向水平飞行。
空间三轴角度欧拉角分为仰俯角、横滚角、航向角:倾斜角是仰俯角时,向前、向后飞行;倾斜角是横滚角时,向左、向右飞行;而倾斜航向角时,向左、右旋转运动,左(右)旋转是由于顺时针两电机产生的反扭矩之和与逆时针两电机产生的反扭矩之和不等,即不能相互抵消,机身便在反扭矩作用下绕z轴自旋转。
2 姿态解算四轴飞行器运用姿态解算计算出空间三轴欧拉角。
结构框架如图2所示,陀螺仪采样三轴角速度值,加速度传感器采样三轴加速度值,而磁力传感器采样得到三轴地磁场值,将陀螺仪、加速度传感器、磁力传感器采样后的数据进行标定、滤波、校正后得到三轴欧拉角度,其中陀螺仪和加速度传感器选用MPU6050芯片,磁力传感器选用HMC5883L芯片,采用IIC总线与主控板通信。
图2 姿态解算结构图由于传感器存在器件误差,因此在使用前需要标定。
四旋翼飞行器控制系统硬件电路设计

图1 四旋翼飞行器的结构形式
2015.12
41
行。
通过适当地改变电机的转速,来控制飞行器的飞行状态。
1.3 飞行器控制系统总体系统设计出系统,控制模块的主要输入信号有
各个传感器的测量数据,输出信号为
四路变脉宽电机控制信号,需要多个
载与调试。
此微控制器具有8个定时
器,对于信号采集和PWM输出均能
图4 遥控器硬件电路图3 MPU-6050姿态测量电路
图2 系统总体框图
nRF24L01无线模块器件。
其发射电路可以通过LC振荡电路构成。
为了便控制参数给飞行器,使其按照控制
算法运行;(2)在飞行器调试阶段,
完成飞行器PID参数的修改和调整。
(2)反电动势检测
在换向的过程中
图5 反电动势检测电路图6 实际飞行姿态角数值
图13 ZVS降压时序图
图14 无人机数据链解决方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Open A VR Studio 4. It will ask you if you want to begin a new project, or open an existing project.
Choose Cancel and click on the connect icon.
It will open a new window with a connection dialogue asking you to select your programmer and connection port. With a programmer like the A VRISP mkII it is easy because when you select that programmer it brings back only one choice of port... USB. The A VR-ISP500 from Olimex is recognised as a STK500 and has the option to auto choose the port. If it fails to recognise the port,you may need to manually set the port for the programmer in your Windows device settings to COM1 up to COM4 for A
VR Studio to recognise it.
When you have chosen your programmer and port, click connect and you will be taken to the AV R programming dialogue.
In the A VR programming window go to the "Main" tab and make sure that the chip you are programming (e.g. Atmega168) is selected in the "Device and Signature Bytes" drop down menu. Also make sure that the" Programming mode and target settings are set to ISP. Make sure that the settings for the ISP mode have the ISP frequency set low enough to talk to the chip. I set my A VR-ISP500 programmer's frequency to 115.2 kHz. This is quite an important setting to get right. If you click on "Read Signature" and you get the response "Signature matches selected device" you have successfully managed to connect to your IC.
Also make sure that the target board or PCB is powered (You can check this by clicking on the HW Settings tab and checking if the programmer can see any voltage).
Now it is time to set the fuses so click on the "Fuses" tab. A VR Studio is very good in this respect as it will work out the fuse settings for your particular IC depending upon the check box options you choose.
Set the check boxes according to the following.
SELFPRGEN: unchecked
RSTDISBL: unchecked
DWEN: unchecked
SPIEN: checked
WDTON: unchecked
EESA VE: unchecked
BODLEVEL: Brown-out detection at VCC=1.8 V
CKDIV8 : unchecked
CKOUT: unchecked
SUT_CKSEL: Int. RC Osc. 8 MHz; Start-up time PWRDWN/RESET: 6 CK/14 CK + 65 ms The fuse setting output will be displayed at the bottom of the window.
Check the "Auto read" "Smart warnings" and "Verify after programming" options at the bottom of the window and then click program.
If all goes to plan, you should get OK response messages in the output section at the bottom of your window for Entering Programming mode, writing fuse address, reading fuse address, Fuse bits verification and leaving programming mode.
If you get error messages, then recheck your chip version and all the connections from your programmer to the board and that the power is on. Also make sure that your fuse settings are as described above.
Flash the Firmware
Click on the "Program" tab and have a look at the "Flash" section which is the 2nd section down. Check the "Input HEX file" check box. Then browse the unzipped firmware folder and click on your firmware HEX file suitable for the chip you are programming for an Atmega168. Then click "Program" in the Flash section of the window and you should get an OK response in the output section at the bottom of the window. Then click "Verify" to make sure that the program has been successfully uploaded and if you have an OK response coming back at the bottom of the window then you have successfully programmed the IC with the test program.
Design Schematics for the v.5.5 SMD PCB
Ya w Breakout Board Schematic。