无人机传感器基础
无人机控制(PX4)系统传感器介绍
飞控系统的传感器1.1 飞控系统的传感器无人飞行器要求能够稳定飞行,首先最基础的问题是需要确定自己在空间中的位置、速度和姿态等相关的系统状态。
而要的到这些状态,就需要通过不同的安装在机身系统上的各种不同的传感器。
我们所处的空间是三维空间,因此主要的飞行器系统状态也主要基于这个三维空间同时在时间维度进行拓展:1:通过全球定位系统GNSS来定位自己的经度、维度和高度等三维坐标信息,同时也可以获取这三维的速度信息2:通过陀螺仪加速度计直接获取三轴加速度信息与旋转角信息的状态量,其他的状态栏只有通过姿态解算3:当飞行器需要往某个方向飞行时是通过调整飞行器的姿态往对应方向倾斜,飞行器的一部分升力会分配到该方向上成为该方向的拉力。
飞行器要能够调整飞行的姿态,就必须能够实时的获得机体当前相对于惯性坐标系的姿态,在三维空间中同样姿态角也是由三个轴的角度来表示4:飞行器的三维空间位置信息、三维空间速度信息、三维空间角度信息以及三维空间加速度信息和三维空间的角速度信息,总共有是十五个系统空间状态量需要获得5:传感器跟估计的精度决定了建模辨识与控制的精度,然后传感器跟估计的精度,与建模辨识,一起决定了控制的精度。
因此传感器的采集精度与飞行控制的控制精度密切相关1.2 I2C简介光标飞控系统中集成的微机械六轴传感器和磁力计均采用I2C总线接口与主控处理器连接。
本章着重介绍I2C接口总线、各传感器的接口驱动、数据采集及处理模型。
I2C(Inter-Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其它的一些外围设备。
和我们常用的UART通信不同,虽然UART有TX、RX两个接口,但是这两根线都是可以单独使用,I2C 是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。
在CPU与被控IC设备之间、IC设备与IC设备之间进行双向传送,高速I2C总线一般可达400kbps以上。
无人机传感器与检测技术 项目五 红外传感器认知与实验

项目描述
红外传感器(也称红外探测器)是利用红外线的物理 性质来进行测量的传感器,是能将红外辐射能转换成电能 的光敏器件,是红外探测系统的关键部件。
红外线传感器常用于无接触温度测量、距离测量、气 体成分分析和无损探伤。例如采用红外线传感器远距离 测量人体表面温度的热像图,可以发现温度异常的人员; 利用人造卫星上的红外线传感器对地球云层进行监视, 可实现大范围的天气预报;采用红外线传感器可检测飞 机上正在运行的发动机的过热情况等。无人机搭载的红 外传感器主要用于检测无人机周边的障碍物。
生命光波能与人体产生共鸣和吸收,促进内分泌平衡, 起到保健的功用, “生命光波”渗入体内之后,便会
引起人体细胞的原子和分子的共振,透过共鸣吸收, 分子之间摩擦生热形成热反应,促使皮下深层温度上 升,并使微血管扩张,加速血液循环,有利于清除血 管囤积物及体内有害物质,将妨害新陈代谢的障碍清 除,重新使组织复活,促进酵素生成,达到活化组织 细胞、防止老化、强化免疫系统的目的。
α为实际物的吸收率, α= ε。
揭示了绝对黑体的单色辐射力和波长及热力学温 度的关系。
单色辐射力是辐射物体单位表面积在单位时间内及某一 波长下,单位波长间隔向空间辐射的能量。
E
C1-
5
exp
C2
T
1
1
λ为波长,μm;C1为第一辐射常数,C1=3.743×108 μm4·W/m2;C2为第 二辐射常数,C2=1.439×104 μm·K。
2、优点
热探测器的优点是响应波段宽,响应范围可 扩展到整个红外区域,可以在常温下工作, 使用方便,应用广泛。
(二)光子探测器
1、光子效应
入射光辐射的光子流与探测器材料中的电子互相作 用,从而改变电子的能量状态,引起各种电学现象。
dji o3 原理
dji o3 原理
DJI O3是一种用于飞行器的数字图像传感器。
它采用了一种先
进的光学和数字处理技术,旨在提供高质量的图像和视频捕捉能力。
该传感器的原理涉及到几个关键方面:
1. 光学原理,DJI O3传感器采用先进的光学镜头和滤光器,
以捕捉光线并将其转换为数字信号。
这些光学元件有助于确保图像
的清晰度和色彩准确性。
2. 数字处理原理,一旦光线被传感器捕捉到,数字信号被传输
到内部的处理器进行处理。
这些处理过程可能包括去噪、色彩校正、对比度调整等,以确保最终的图像和视频质量。
3. 数据传输原理,处理后的图像和视频数据可以通过无线传输
技术,如Wi-Fi或者其他专有的数据传输协议,传输到飞行器的控
制器或者其他设备上,以供实时监控或者后续处理。
4. 集成原理,DJI O3传感器还可能集成其他传感器,如GPS、
陀螺仪等,以提供更全面的飞行器导航和控制能力。
总的来说,DJI O3传感器的原理涉及到光学捕捉、数字处理和数据传输等多个方面,以提供高质量的图像和视频捕捉能力,并为飞行器的导航和控制提供支持。
无人机传感器与检测技术 项目三 图像传感器认知

任务实施
1)实验室准备如图3-8所示的OV7670CMOS 图像传感器模块。 2)熟悉OV7670图像传感器模块,查阅资料, 汇报OV7670图像传感器的特性及各引脚含 义。 3)查阅资料,收集CMOS图像传感器模块的 种类、性能参数等资料,并填写表3-2。
图像清晰 不会烧伤感光面
CCD电容器阵列
移位寄存器
光敏元器件与移位寄存器分离式结构
单读式
光敏单元 转移栅
输出
移位寄存器
双读式
移位寄存器1 转移栅
移位寄存器2
输出 光敏单元
2048位MOS电容器线阵CCD内部框图
线阵CCD图像传感器的应用
扫描仪
字符识别
面阵CCD图像传感器的应用
数码摄像机
知识拓展
测量玻璃管的 直径与壁厚
2)作为光学信息处理装置的输入环节,可用于传真技术、 光学文字识别技术以及图像识别技术、传真、摄像等方面。
字符识别
车牌识别
3)作为自动流水线装置中的敏感器件,可用于机床、自 动售货机、自动搬运车以及自动监视装置等方面。
4)可作为机器人的视觉。
CCD图像传感器应用实例 医疗
项目三 图像传感器认知
图3-1 南半球上方火星影像
图3-2 北半球上方火星影像
项目描述
云台相机是航拍无人机不可或缺的设备之一,而图像 传感器则是云台相机的核心部件。图像传感器又称感光元 件,是利用传感器的光-电转换功能,将其感光面上的光信 号图像转换成与之成比例的电信号图像的一种功能器件。
固态图像传感器是由在单晶硅衬底上布设若干光敏单 元和移位寄存器集成制成功能化光电转移器件,光敏单元 也称为像素。一般可分为两种,一种是CCD,一种是CMOS。 无人机上搭载的云台相机一般为CMOS图像传感器,如DJI Inspire 2、DJI Phantom 4A/4P、Xiro Xplorer 4K上的云台相机 都搭载CMOS图像传感器。
无人机传感器技术 传感器的分类
1.3传感器的分类往往同一种被测量可以用不同的传感器类型来测量,如压力可用电容式、电阻式、光纤式等传感器来进行测量;而同一原理的传感器又可测量多种物理量,如电阻式传感器可以测量位移、温度、压力及加速度等。
因此,传感器有许多种分类方法,常用的分类方法如下。
1.3.1 按被测物理量分类按被测物理量分类的方法是根据被测物理量的性质进行分类的。
按被测物理量分类的传感器有加速度传感器、温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器及转矩传感器等。
这种分类方法把种类繁多的被测物理量分为基本被测物理量和派生被测物理量两类。
例如,可将力视为基本被测物理量,从力可派生出压力、重量、应力和力矩等派生被测物理量。
当需要测量这些被测物理量时,只要采用力传感器就可以了。
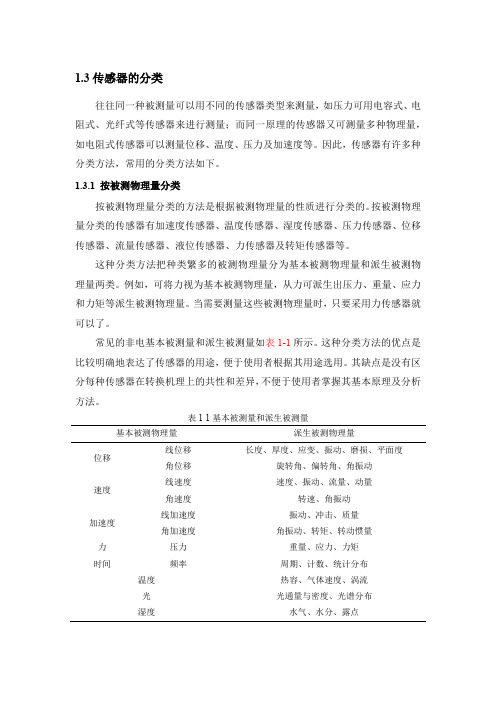
常见的非电基本被测量和派生被测量如表1-1所示。
这种分类方法的优点是比较明确地表达了传感器的用途,便于使用者根据其用途选用。
其缺点是没有区分每种传感器在转换机理上的共性和差异,不便于使用者掌握其基本原理及分析方法。
表1-1基本被测量和派生被测量基本被测物理量派生被测物理量位移线位移长度、厚度、应变、振动、磨损、平面度角位移旋转角、偏转角、角振动速度线速度速度、振动、流量、动量角速度转速、角振动加速度线加速度振动、冲击、质量角加速度角振动、转矩、转动惯量力压力重量、应力、力矩时间频率周期、计数、统计分布温度热容、气体速度、涡流光光通量与密度、光谱分布湿度水气、水分、露点1.3.2 按传感器工作原理分类按传感器工作原理的分类方法是将物理、化学、生物等学科的原理、规律和效应作为分类的依据。
这种分类法的优点是对传感器的工作原理表达比较清楚,而且类别少,有利于传感器专业工作者对传感器进行深入研究分析。
其缺点是不便于使用者根据用途选用。
1.电学式传感器电学式传感器是应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。
无人机传感器的工作原理

无人机传感器的工作原理
首先,无人机传感器的工作原理可以从传感器类型角度来解释。
无人机传感器通常包括GPS导航系统、惯性测量单元(IMU)、激光
雷达、摄像头、红外线传感器等。
这些传感器通过不同的物理原理
来感知周围环境,比如GPS通过接收卫星信号来确定位置、IMU通
过测量加速度和角速度来确定飞行姿态、激光雷达通过激光束来测
量距离和高度、摄像头通过图像识别来感知地面物体等。
这些传感
器协同工作,提供了全面的环境感知能力。
其次,无人机传感器的工作原理还可以从数据处理和算法角度
来解释。
传感器获取的原始数据需要经过滤波、校准和融合等处理,以提高数据的准确性和可靠性。
同时,针对不同的任务和环境,需
要设计相应的数据处理算法,比如用于自动驾驶的路径规划算法、
用于避障的障碍物检测算法等。
这些算法能够实现对传感器数据的
实时分析和决策,从而指导无人机的飞行和任务执行。
此外,无人机传感器的工作原理还涉及到无人机系统的整体架
构和控制逻辑。
传感器获取的环境信息需要与飞行控制系统进行实
时通信和交互,以调整飞行姿态、修正航线、避开障碍物等。
因此,无人机传感器的工作原理还包括传感器与飞行控制系统之间的数据
传输和协作方式。
综上所述,无人机传感器的工作原理涉及传感器类型、数据处理和算法、系统架构和控制逻辑等多个方面。
通过这些方面的综合作用,无人机传感器能够实现对周围环境的全面感知和智能决策,从而实现各种飞行任务。
无人机传感器技术 2.2 陀螺仪

2.2 陀螺仪陀螺仪就是角速度传感器,是利用陀螺效应制造出来用来测量物体角速度的一种传感器。
陀螺效应是指高速旋转物体的旋转轴所指的方向不会随着外力的方向改变而发生改变。
1850年,法国物理学家莱昂·傅科在研究地球自传中获得灵感而发明了陀螺仪,就像把一个高速旋转的陀螺放到一个万向支架上,靠陀螺的方向来计算角速度,如图2-39所示。
陀螺仪最先应用在航海上,直到二战时,陀螺仪才应用到航空航天上,这时陀螺仪都是机械陀螺仪,也就是传统陀螺仪。
图2-39 最早陀螺仪二十世纪八十年代以后,现代光纤陀螺仪和激光谐振陀螺仪都得到了非常迅速的发展。
它们具有结构紧凑、灵敏度高、工作可靠等优点,在很多的领域已经完全取代了传统陀螺仪,成为现代飞控导航系统中的关键部件。
二十世纪九十年代后,微机械陀螺仪在民用产品上得到了广泛的应用,部分应用在低精度的惯性导航产品中。
陀螺仪的种类很多,按用途来分,它可以分为传感陀螺仪和指示陀螺仪。
传感陀螺仪用于飞行体运动的自动控制系统中,作为水平、垂直、俯仰、航向和角速度传感器。
指示陀螺仪主要用于飞行状态的指示,作为驾驶和领航仪表使用。
广泛使用的MEMS陀螺(微机械)可应用于航空、航天、航海、兵器、汽车、生物医学、环境监控等领域。
并且MEMS陀螺相比传统的陀螺有明显的优势:1.体积小、重量轻。
适合于对安装空间和重量要求苛刻的场合,例如弹载测量等。
2.低成本。
3.高可靠性。
内部无转动部件,全固态装置,抗大过载冲击,工作寿命长。
4.低功耗。
5.大量程。
适于高转速大g值的场合。
6.易于数字化、智能化。
可数字输出,温度补偿,零位校正等。
利用陀螺仪的动力学特性制成的各种仪表或装置,主要有以下几种:(1)陀螺方向仪能给出飞行物体转弯角度和航向指示的陀螺装置。
它是三自由度均衡陀螺仪,其底座固连在飞机上,转子轴提供惯性空间的给定方向。
若开始时转子轴水平放置并指向仪表的零方位,则当飞机绕铅直轴转弯时,仪表就相对转子轴转动,从而能给出转弯的角度和航向的指示。
无人机的传感器
无人机传感器通过各种传感器获取环境数据, 包括图像、声音、气象等多种数据。这些数据 的采集是实现智能化应用的基础,为后续的数 据处理和分析提供了重要的信息支持。
数据传输
通信模块 将数据传输至地面控制 中心
传输方式 无线网络、卫星通信等
数据处理
处理方式
01 数据解码、图像处理、模型构建
分析内容
02 对接收到的数据进行处理和分析
应用领域 航空、导航
总结
视觉传感器
用于图像采集、目标识 别
遥感传感器
通过微波、红外线技术, 实现地面信息探测
气象传感器
测量温度、湿度、气压 等气象参数
惯性传感器
获取飞行姿态、加速度 信息
●03 第3章 无人机传感器的技术原理
传感器原理概述
传感器是一种将某种物理量转换为电信号的器 件,无人机传感器通过不同类型的传感器获取 周围环境信息,从而实现各种功能和任务。
无人机的传感器
汇报人:
时间:2024年X月
●01
第一章 无人机传感器的发展历 史
无人机传感器的起源
二战时期军事侦察
01 最早的应用场景
技术发展推动民用应用
02 无人机传感器的逐渐普及
03
无人机传感器的发展现状
广泛应用于不同领域 农业、环保、测绘等
不断推陈出新 功能日益强大
无人机传感器的 未来展望
展望未来
智能化发展
01 期待取得更大突破
社会贡献
02 为人类社会的发展和进步做出更大贡献
03
结尾
通过对无人机传感器的总结与展望,我们看到 了它的重要作用、发展趋势、挑战与机遇以及 对未来的展望。希望无人机传感器在未来能够 不断创新,为社会发展做出更大的贡献。