北京工业大学现代传感与检测技术
二维码识别技术
研究生姓名: 专
邓
华 研究方向: 智能仪表和自动化装置 职称: 高 工
业: 检测技术和自动化装置 方 滨
导师姓名:
论文报告提交日期
2004 年 5 月
学位授予日期
授予单位名称和地址
北京工业大学
北京市北京工业大学平乐园 100 号
摘要
摘
要
பைடு நூலகம்
条码技术自问世 20 多年来发展迅速,在各个行业得到广泛的应用。随着科 技的发展,一维条码由于受到信息容量的限制和使用时对数据库的依赖,在很多 场合已不能满足需要。于是就产生了二维条码。在众多二维条码中,PDF417 的 应用最为广泛。 本课题的主要任务是 PDF417 二维条码图象的高速读取和识别。二维条码图 象的读取是由图象高速读取装置完成的,其前端是采用 OmniVision 公司的 OV7110 黑白数字传感器,后端采用 CPLD 设计的数据采集控制器。这种采取硬 件读取图象的方式使得数据读取的速度大大的加快。 图象读取装置将条码图象转 化为数字图象后传送至计算机中, 由计算机中的图象处理程序对图象数据进行处 理。然后在条码中定位单个码字符号的图象,最后利用投影算法识别出单个码字 符号。 通过多次试验,本课题二维条码识别系统对 PDF417 条码的读取速度和识别 结果比较满意。
Key word:
2D barcode high speed image acquiring projection PDF417
image processing
-II-
目录
目
录
摘要 ....................................................................................................................... I Abstract ..............................................................................................................II 第 1章 概 述 ......................................................................................................... 1 1.1 条码知识 ..................................................................................................1 1.1.1 一维条码( 1D Barcode) ................................................................ 1 1.1.2 二维条码( 2D Barcode) ................................................................ 1 1.2 PDF417 简介 ...........................................................................................2 1.2.1 PDF417的特点 ................................................................................. 2 1.2.2 PDF417 结构 ................................................................................... 3 1.3 PDF417二维条码的应用 ..........................................................................4 1.4 二维条码阅读器 .......................................................................................4 1.5 本课题的内容 ...........................................................................................4 第 2章 高速图象采集电路 ...................................................................................6 2.1 OV7110及其外围电路 .............................................................................6 2.1.1 OV7110的简介 ................................................................................. 7 2.1.2 OV7110的视频数据总线 ................................................................. 8 2.1.3 OV7110的时序和外围电路 ............................................................. 8 2.2 CPLD高速采样电路的设计 ....................................................................10 2.2.1 CPLD简介 ...................................................................................... 10 2.2.2 图象开始信号的确认 ..................................................................... 10 2.2.3 图象信号的采集 ............................................................................. 12 2.2.4 RAM的读控制 ................................................................................ 14 2.3 微控制器软件及硬件设计 ......................................................................14 2.3.1 2.3.2 2.3.3 微控制器硬件设计 ......................................................................... 14 系统逻辑控制 ................................................................................. 15 I2C总线技术简介 ........................................................................... 16 I2C总线的软件模拟设计 ................................................................ 18
向科目组北京工业大学

001机械工程与应用电子技术学院080102固体力学_ 01固体力学方法或数值模拟080103流体力学_ 01流体力学方法或数值模拟080104工程力学.01工程力学方法.实验或模拟_ 02动力学、振动与控制080200机械工程_ 01精密及超精密数控加工技术与装备_ 02数字化设计与制造系统智能监控技术_ 03现代焊接技术与装备-04机电系统控制及自动化_ 05机构及机器人系统分析与控制_ 06机械及微机电系统结构设计080400仪器科学与技术_ 01精密测试技术与仪器_ 02微机电系统技术及应用.03现代测控技术及方法_ 04计算机测试与控制技术一05智能仪器与虚拟仪器技术002电子信息与控制工程学院080901物理电子学_ 01新型激光、发光技术、伯息通伯光电子学_ 02新型光电探测与红外光电子学_ 03光电子器件的计算辅助设计技术_ 04光电子器件的应用系统080902电路与系统_ 01DSP与嵌入式系统_ 02语音编码与合成系统14153219022167319①101政治理论(含法律硕士)②201英语(含法律硕士)③301数学一④811理论力学或812材料力学I(D101政治理论(含法律硕士)②201英语(含法律硕士)③301数学一④811理论力学(Dioi政治理论(含法律硕士)②201英语(含法律硕士)③301数学一④811理论力学或812材料力学I①101政治理论(含法律硕士)②201英语(含法律硕士)③301数学一④811理论力学或812材料力学I或813 电工学①101政治理论(含法律硕士)②201英语(含法律硕士)③301数学一④803电子技术I或809工程力学或813 电工学①101政治理论(含法律硕士)②201英语(含法律硕士)③301数学一④823半导体物理①101政治理论(含法律硕士)②201英语(含法律硕士)③301数学一④822信号与系统同等学力考生须符合简章中报考条件中的第(二)条。
北京工业大学考研专业目录
北京工业大学考研专业目录
1、经济管理类:工商管理硕士、经济学硕士、国际经济与贸易
硕士、工程经济学硕士、电子商务硕士、工业工程硕士、技术经济及
管理硕士、金融学硕士、信息管理与信息系统硕士、会计学硕士、市
场营销硕士、公共事业管理硕士、企业管理硕士、图书情报与档案管
理硕士、旅游管理硕士等
2、政府管理类:社会调查学硕士、行政管理硕士、非营利组织
管理硕士、社会工作硕士、社会政治学硕士
3、技术类:机械工程及自动化硕士、电气工程及其自动化硕士、计算机科学与技术硕士、自动化硕士、车辆工程硕士、精密仪器与机
械硕士、热能工程硕士、制冷与低温技术硕士、测控技术及仪器硕士、材料科学与工程硕士、环境工程硕士、交通运输工程硕士、石油工程
硕士、核工程硕士、仪器仪表工程硕士、机械设计制造及自动化硕士、新能源科学与工程硕士等。
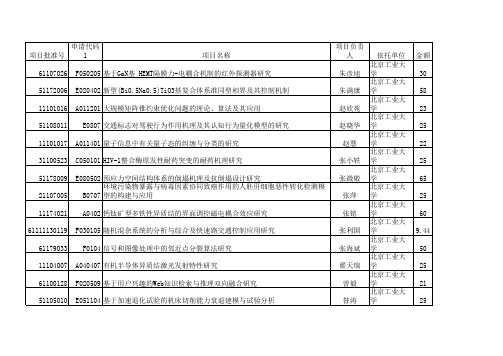
2011年国家自然基金获得者名录——北京工业大学
4 58 60 60 58 6ห้องสมุดไป่ตู้ 50 25 62 62 25 70 27 21 24 25 25 25 26 58 19 24 64 21 25 46 25 60 23 60
31171267 61175087 21176007 11101018 61171169 61176071 51108009 51178005 11127404 51178008 21176005 71171006 51101001 51108005 61175115 61100129 21103005 51178004 51175007 51105009 51108008 11172011 51105005 51178010 61170221 51108012
北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学 北京工业大学
E0419 A011102 A020316 E080701 D0214 E080405 B010803 B060306 E051203 B070102 E080804 E080402 F020501 E090802 F030117 F050208 F010407 F020502 F050104 A040208 E051102 B030204 E0105 E0107 A020312 F050208 E0417 A020316 F010106 F020502
iPPG技术及生理参数检测的教育应用综述

2021575成像式光电容积描记技术(imaging Photoplethys-mography,iPPG)是近些年发展迅速的一种非接触式生理参数检测技术[1],是在传统单点接触式光电容积描记技术(Photoplethysmography,PPG)上发展起来的。
与传统的接触式PPG相比,iPPG技术具有无创、非接触检测人体的优点。
在现代医学体系中,心率(Heart Rate,HR)、心率变异性(Heart Rate Variability,HRV)、呼吸率(Breathing rate,BR)、血氧饱和度(Oxygen saturation,SpO2)等生理参数的检测对人体健康评估、疾病诊断等起着重要的作用。
而生理参数检测除了应用在传统的医疗场景中,也逐渐扩展到智能教育等领域。
比如,通过检测教室空间里参与者的生理参数来进行情绪识别[2],可以及时评估学生的心理健康情况,同时对教师及时调整教学状态也有很大的督促作用。
而在传统的教学课堂上,主要还是采用课堂观察这一评估方式。
课堂观察是教师动态捕捉教学现象,实时分析教学情况,获得教学质量反馈,以此对教学内容、方法、状态做出及时调整的重要手段。
但这种评估方式是一种基于经验的评价,主观性较强,评价结果不够精准[3]。
随着大数据、人工智能的不断发展,传统教育领域的智能化将是一个必然的发展趋势。
同时近些年来,智慧教育越来越受到国家的重视。
结合人工智能技术对学生的心理情绪进行及时监督,对iPPG技术及生理参数检测的教育应用综述郑鲲1,孔江萍1,周晶2,慈康怡1,常鹏11.北京工业大学信息学部,北京1001242.北京工业大学继续教育学院,北京100124摘要:获取学习状态数据是实现智能教育的前提,生理参数是反映学生学习状态的重要信息。
而目前在智能教育领域生理参数检测方法比较单一,仍然以接触式为主,存在一定局限性。
而非接触式生理参数检测方法更有利于智能教育的广泛推广。
2013年北京工业大学优秀研究生学位论文作者及导师名单

控制理论与控制工程 控制理论与控制工程 模式识别与智能系统 控制理论与控制工程 微电子学与固体电子学 微电子学与固体电子学 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 土木工程 物理化学 物理化学 物理化学
2/7
学位论文题目 形状记忆聚合物及其智能结构热力学行 为研究 液体静压转台系统动力学分析与参数优 化设计 仿人机械臂构型综合与臂姿规划 面向超重力旋流净油装置的旋流器流场 仿真及研究 铁磁性构件磁记忆检测与特征提取方法 研究 考虑轴向变形的柔顺机构伪刚体动力学 建模及特性研究 摆线齿锥齿轮误差对动力学的影响研究 面齿轮单面啮合测量仪的研制 复合材料板的非接触超声导波扫描成像 检测技术研究 基于神经网络的音频频带扩展算法研究 基于波束形成法的麦克风阵列语音增强 技术研究 面向无线环境的 H.264 能量有效视频加 密技术研究 基于内容的图像/视频重定向方法研究 基于模式选择的多视点视频快速 算法研究 基于三星干扰源定位的时差参数 估计研究 GaN 基高压 LED 的设计和制备 一种低功耗大负载低压差线性稳压器 (LDO)的研究与设计 具有 ITO 的 GaN LED 光电特性及 可靠性研究 AlGaAs/InGaAs PHEMT 栅退化 模型研究 基于运动想象脑电的手臂运动功能康复 研究 基于 MKICA-PCA 的间歇过程故障监测 污水处理过程节能优化控制 基于神经网络的土壤源热泵系统运行优 化控制研究
4/7
58
李欣尉
戴洪兴
化学工程与技术
59
唐海齐
张国俊
化学工程与技术
60
王媛
戴洪兴
化学工程与技术
自动控制专业学校评级

自动控制专业学校评级2022全国自动化专业大学排名一览表2022高考填报志愿时,全国自动化专业大学排名情况怎样是广大考生和家长朋友们十分关心的问题,然而教育部门并没有公布权威的自动化专业大学排名,但是公布了控制科学与工程学科评估结果,而自动化是一级学科控制科学与工程的下属专业,通常来说某大学学科排名较好其下属专业排名也不错,以下是具体评估结果一览表,希望对大家有所帮助。
全国控制科学与工程学科评估结果以下数据来源于教育部学位与研究生教育发展中心,共有115所开设控制科学与工程学科的大学排名情况,比较好的学校有清华大学、哈尔滨工业大学、浙江大学、北京航空航天大学、北京理工大学、东北大学、上海交通大学、国防科技大学,以下是具体榜单。
自动化专业相关介绍自动化专业以系统科学、控制科学、信息科学等新兴横断学科为理论基础,以电工技术、电子技术、传感技术、计算机技术、网络技术等先进技术为主要技术手段,以实现各类运动体的运动控制、各类生产过程的过程控制、各类系统的最优化等跨学科综合性专业。
自动化专业的一级学科为“控制科学与工程”,本专业主要有4个发展方向:1、运动控制;2、过程控制;3、嵌入式系统与机器人;4、人工智能。
培养掌握自动控制、计算机软硬件、人工智能和机器人领域相关知识,能够在自动化及相关领域从事系统设计、产品开发、科学研究和技术管理等工作,能解决复杂工程问题工程应用技术型人才。
主要课程:电路、信号与系统、PLC编程应用、模拟电子技术、数字电子技术、自动控制原理、现代控制理论、微机原理及应用、软件技术基础、电机与拖动、电力电子技术、计算机控制技术、系统仿真、计算机网络、运动控制、过程控制、单片机与嵌入式系统原理、计算机辅助设计、专业英语、智能控制,C语言程序设计,C++语言。
核心知识领域:电路及电子学基础、自动化基础理论、计算机技术基础(硬件、软件、网络等)、传感器与检测技术、电力电子技术、计算机控制技术、运动控制技术、过程控制技术等。
北京工业大学信号与系统考研导师介绍资料
在数字图像处理研究方面有专门的“光电成像跟踪实验室”,从事光电目 标检测、识别、跟踪,远地点目标跟踪等技术研究。
对考生的要求
• 首先要有严谨做学问的精神,求知欲强,工作勤奋,有合作精神,读研期间不 能工作实习。
• 要求有扎实的数字图像处理、计算机网络、数值分析等方面知识,熟练的C语 言编程能力 ,及一定的DSP硬件知识,动手能力强。
主要研究方向包括:1、多媒体信息安全;2、移动流媒体系统;3、图像/视 频编码与网络传输;4、无线视频传感器网络;5、遥感图像的压缩与处理;6、 图像/视频超分辨率复原;7、三维数字处理技术与应用
1、英语、数学基础好;
2、能熟练进行C语言编程(或者C++、.NET等);
3、动手能力强;
4、有团队精神,做人踏实、勤奋努力。
志愿的排序,因此填报志愿请慎重!如果你的三个志愿都 未被导师选上,我们会通过导师抽签的方法确定你的导师。
关于导师选择学生的说明
1. 流程控制与管理:吴强,按照以下流程的顺序进行并控制时间
2. 流程安排
(1)第一阶段: 导师根据学生填报的第一志愿选择自己的学生, 仅第一志愿可选; 时间长度20分钟