三线摆测量物体转动惯量实验过程分析和实验数据处理
三线摆测物体的转动惯量
7.预习思考题回答
(1)用三线摆测刚体转动惯量时,为什么必须保持下盘水平?
答:扭摆的运动可近似看作简谐运动,以便公式推导,利用根据能量守恒定律和刚体转动定律均可导出物体绕中心轴的转动惯量公式。
(2)在测量过程中,如下盘出现晃动,对周期有测量有影响吗?如有影响,应如何避免之?
答:有影响。当三线摆在扭动的同时产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差,其误差的大小是与晃动的轨迹以及幅度有关的。
(3)三线摆放上待测物后,其摆动周期是否一定比空盘的转动周期大?为什么? 答:不一定。比如,在验证平行轴定理实验中,d=0,2,4,6cm 时三线摆周期比空盘小;d=8cm 时三线摆周期比空盘大。
理论上,22010002
0[()]04x gRr
I I I m m T m T H π=-=
+-> 所以2
2
000()0m m T m T +->=
〉0/T T >
1,并不能保证0/1T T >,因此放上待测物后周期不一定变大。
(4)测量圆环的转动惯量时,若圆环的转轴与下盘转轴不重合,对实验结果有何影响?
答:三线摆在扭摆时同时将产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差。 8.数据记录及处理
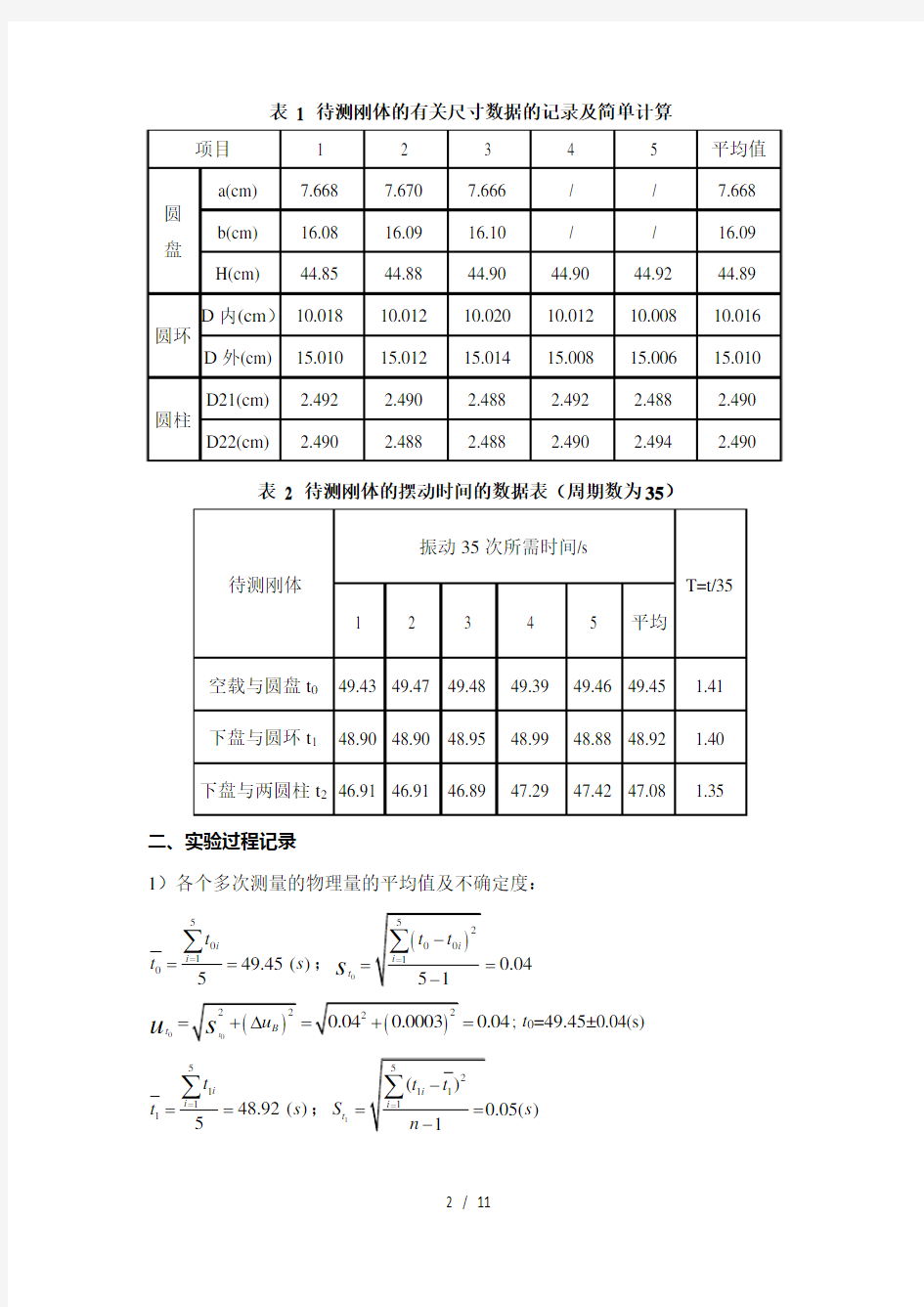
表 1 待测刚体的有关尺寸数据的记录及简单计算
g(重力加速度)= 9.793 m/s 2 m 0(圆盘) = 380 g m 1(圆环) = 1182 g m 21(圆柱)= 137 g
m 22(圆柱)= 137 g x(两圆柱离中心距离)= 4.50 cm
表 2 待测刚体的摆动时间的数据表(周期数为35)
二、实验过程记录
1)各个多次测量的物理量的平均值及不确定度:
5
01
049.45()5
i
i t t s ==
=∑;0
0.04t s =
=
0.04t u
=
==; t 0=49.45±
0.04(s) 5
11
148.92()5
i
i t
t s ==
=∑;1)t S s =
1
0.05t u
=
=(s ); t 1=48.92±
0.05(s)
5
21
247.08()5
i
i t
t s ==
=∑
;2)t S s =
2
0.25()t s u
==; t 2=47.08±
0.25(s) 2) 待测物体的转动惯量 下盘加圆环: a )空盘的转动惯量:
322222
000002222
0321182109.7937.6681016.091049.45()1212 3.1444.89103545.347510(.)
m gRr m gab I T T H H kg m ππ-----??????===???=? b )空盘加圆环的转动惯量:
2
32212
1022
120
32()(3801182)109.7937.6681016.0951048.92()12 3.1444.891035126.966810(.)
m m gabT H kg m I π-----++??????==???=?c )圆环的转动惯量平均值:
33210(6.9668 5.3475)10 1.619310(.)I I I kg m --=-=-?=? 圆环转动惯量结果表示:
I u ===521.66310(.)
kg m -=?=〉32(1.6190.017)10()0.017
100%100%1%1.619I I Ir
I I u k u u I
-?=±=±???=?=?=??g.m 下盘与两圆柱体:
222220202021220021220022
00
2222
3
22
42[()][()]4129.7937.6681016.0951047.0849.45[(1371371182)()1182()]1012 3.1444.891035356.258710(.)
x gRr gab
I I I m m m T m T m m m T m T H H kg m ππ-----=-=
++-=++-????=++?-?????=
?
x I u ====526.307410(.)
kg m -=?结果表示:42(6.30.6)10(.)
100%9%x
x
x x I I Ixr x I I u kg m u u I -?=±=±??
?=?=?? 理论公式: 3)百分误差的计算
a)圆环的转动惯量理论公式:
2
232243211
21I ()38010(10.01615.010)10 1.546710(.)448
D D m kg m ---=+=???+?=?内外
理论
相对误差:
1.6193 1.5467
100%100% 4.7%1.5467
I I I --?=?=理论理论 b)圆柱的转动惯量理论公式:
22212221222122123222242I ()()()2224
1
13710[(2.49010)(4.510)]8
2.88010(.)
m m x x m m D D kg m ----++++=
+=????+?=?2122x 理论
相对误差:2 6.2587 2.8802
100%100%8.7%2 2.8802
x I I I --??=?=?理论理论
9.数据分析
圆环的相对不确定度波动较小,为1%。圆柱体的不确定度偏大为9%。这个可
能是由两个圆柱体大小质量分布不完全相同、与下圆盘接触有晃动造成数据不稳定而导致的。圆环的不确定度可能来自于所放的位置与中心轴有偏差而造成的。
10.误差分析
其实验值与理论值间的百分误差分别为4.7%和2.1%。其误差来源可能有以下几种:
1. 圆盘没有完全水平;
2. 上下圆盘中心点连线不在一条直线上;
3. 秒表测量时,起点和终点均目测,不够精确;
4. 圆盘在扭动运动中同时有摆动。
5. 下圆盘上三条钢丝与圆盘交点并不构成等边三角形,将导致上下圆盘中心点连线不在一条直线上。
此外,根据实验数据计算表明,圆柱体的不确定度较大为9%,这可能与圆柱体的分布不完全对程有关。再者,很可能在扭摆过程中,圆柱体与下盘接触有松动,导致周期不准确。
11.实验中现象的分析和处理
(1)加待测物体时盘有晃动,加待测物体时轻放轻取,在扭摆前用手致使下盘稳定静止。
(2)摆动一段时间后下圆盘边缘挡光杆偏离光电门,尽量减少振动,包括手离开桌面。
(3)上圆盘与下圆盘一起摆动,尽量把扭摆幅度减小,保持上盘稳定。
12.结果的分析讨论
本实验用三线摆测量物体的转动惯量,其结果在数据处理中已经给出,误差及原因也在前面进行了分析。通过上述处理和分析得到如下结论:三线摆测物体的转动惯量的方法可靠,其不确定度及误差较小,精确度较高,很好地验证了圆环的转动惯量的理论计算公式和平行轴定理。
本实验有关的圆盘、圆环以及圆柱体的质量及尺寸可采用有关仪器进行精确测量和修正,进一步缩小误差。
弹簧振子振动周期的测量
7.预习思考题回答
(1)在测量弹簧的振动周期T时,为什么先要倒着数5、4、3、2、1、0,当数到“0”时开始计时?如果不这样做,有什么问题?
答:以便手的协同性较好,更准确的计时,减小实验的误差。
8.数据记录及处理
表 1 劲度系数的测量数据(?m=40g)
表 1 T-k对应的数据表格(m=60g)
表 2 T -m 对应的数据表格(k =5.066N.m -1)
二、数据处理及分析
1) 保持质量m =0.060kg,根据做图求出lg C 1、α
图1 lgT 与lgk 的函数关系曲线图
在图中取两点为:P(0.6121,-0.1105),Q(0.8558,-0.2386)可求直线斜率和截距。 斜率:21210.23860.1105
0.52590.85580.6121
y y x x α--+=
==---
截距:21121210.8558(0.1105)0.6121(0.2387)
lg 0.21140.85580.6121
x y x y C x x -?--?-=
==--
因此可求得:C 1=1.6270,110.476711.62704
6.22110.06
C A m β=
== 2)保持弹簧系数K=5.006N.m -1,根据作图可求出lgC 2,β
图 2 lgT 与lgm 函数关系曲线图
在图中取两点,坐标为R (-1.2922,-0.1914),S (-1.1639,-0.1303) 则直线斜率:21210.13030.19140.47671.1639 1.2922
y y x x β--+=
==--+ 截距为:2112221(1.1639)(0.1914)(1.2922)(0.1303)
lg 0.4246(1.1639)(1.2922)
x y x y C x x --?---?-=
==----
则可求出 C 2=2.6581,220.5259
2.6581
6.20035.006C A K α-=
== 由以上A 1和A 2的值可求A 值为:1
2 6.2211 6.2003
6.210722
A A A ++=== 因此弹簧振子的周期公式为:0.5260.4776.21T AK m K m αβ-==(保留三位有效数字) 3)百分误差: a) A 的百分误差为
6.212100% 1.2%2π
π
-?=
b)α的百分误差为
0.5260.5
100% 5.2%
0.5
-+
?=
c)β的百分误差为0.4770.5
100% 4.6%
0.5
-
?=
9、数据分析
通过图解法对实验数据进行了处理,得出了假设方程中A、α、β的值,方法简单可行,与理论值有些偏差,主要来自于较难保证弹簧振动在竖直方向摆动,造成不稳定因素。
10、误差分析
从百分误差的数据可知,A的百分误差较小,α、β的误差较大,可能的来源:1)摆动不在竖直方向,有轻微的横向摆动干扰
2)长时间未使用或者弹簧受到破坏导致弹簧不能正常工作
3)没有考虑弹簧的质量
11、结果及分析:
本实验验证了弹簧振子的周期公式,数据可靠、精确度较高,重复性好。是一种操作简单的可行的科学实验方法。
可考虑弹簧自身的质量对结果的影响,进行修正。
当我被上帝造出来时,上帝问我想在人间当一个怎样的人,我不假思索的说,我要做一个伟大的世人皆知的人。于是,我降临在了人间。
我出生在一个官僚知识分子之家,父亲在朝中做官,精读诗书,母亲知书答礼,温柔体贴,父母给我去了一个好听的名字:李清照。
小时侯,受父母影响的我饱读诗书,聪明伶俐,在朝中享有“神童”的称号。小时候的我天真活泼,才思敏捷,小河畔,花丛边撒满了我的诗我的笑,无可置疑,小时侯的我快乐无虑。
“兴尽晚回舟,误入藕花深处。争渡,争渡,惊起一滩鸥鹭。”青春的我如同一只小鸟,自由自在,没有约束,少女纯净的心灵常在朝阳小,流水也被自然洗礼,纤细的手指拈一束花,轻抛入水,随波荡漾,发髻上沾着晶莹的露水,双脚任水流轻抚。身影轻飘而过,留下一阵清风。
可是晚年的我却生活在一片黑暗之中,家庭的衰败,社会的改变,消磨着我那柔弱的心。我几乎对生活绝望,每天在痛苦中消磨时光,一切都好象是灰暗的。“寻寻觅觅冷冷清清凄凄惨惨戚戚”这千古叠词句就是我当时心情的写照。
最后,香消玉殒,我在痛苦和哀怨中凄凉的死去。
在天堂里,我又见到了上帝。上帝问我过的怎么样,我摇摇头又点点头,我的一生有欢乐也有坎坷,有笑声也有泪水,有鼎盛也有衰落。我始终无法客观的评价我的一生。我原以为做一个着名的人,一生应该是被欢乐荣誉所包围,可我发现我错了。于是在下一轮回中,我选择做一个平凡的人。
我来到人间,我是一个平凡的人,我既不着名也不出众,但我拥有一切的幸福:我有温馨的家,我有可亲可爱的同学和老师,我每天平凡而快乐的活着,这就够了。
天儿蓝蓝风儿轻轻,暖和的春风带着春的气息吹进明亮的教室,我坐在教室的窗前,望着我拥有的一切,我甜甜的笑了。我拿起手中的笔,不禁想起曾经作诗的李清照,我虽然没有横溢的才华,但我还是拿起手中的笔,用最朴实的语言,写下了一时的感受:
人生并不总是完美的,每个人都会有不如意的地方。这就需要我们静下心来阅读自己的人生,体会其中无尽的快乐和与众不同。
(完整版)ERDAS遥感图像处理实验报告
西北农林科技大学 ERDAS实验报告 专业班级:地信111 姓名:杨登贤 学号:2011011506 2013/12/20 ERDAS实验报告
一.设置一张三维图。 (3) 1.底图与三维图 (3) 2.参数设置 (5) (1)三维显示参数 (5) (2)三维视窗信息参数 (6) (3)太阳光源参数 (6) (4)显示详细程度 (6) (5)观测位置参数 (7) 二.(几何纠正几何畸变图像处理):几何纠正结果图。 (7) (2)选择合适的坐标变换函数(即几何校正数学模型) (8) (3)数据控制点采集表 (9) (4)多项式模型参数 (9) (5)图像重采样参数 (10) (6)结果图 (10) 三.(数据输入\ 输出):镶嵌图(根据不同条件做出不同的几张)。 (11) 1.图像色彩校正设置 (12) 四.(图像增强处理):傅里叶高通/低通滤波图或效果图空间增强效果图。 (13) 1.空间增强卷积处理 (13) (1)原图像 (13) (2)卷积增强设置参数 (13) (3)卷积增强处理图像 (14) 2.傅里叶变换 (14) (1)快速傅里叶变换设置参数 (14) (2)低通滤波 (15) (3)高通滤波 (16) 五.光谱增强。 (18) 1.主成分变换 (18) (1)参数设置 (18) (2)处理图像 (19) 2.缨帽变换 (19) (1)参数设置 (19) (2)处理图像 (20) 3.指数计算 (20) (1)参数设置 (20) (2)处理图像 (21) 4.真彩色变换 (21) (1)参数设置 (21) (2)处理图像 (22) 六.(非监督分类):非监督分类结果图分类后处理结果图去除分析结果图。 (23) 1.参数设置 (23) 2.非监督分类结果图 (24) 3.分类后处理结果图 (25)
三线摆测刚体转动惯量实验报告(带数据)
曲阜师大学实验报告 实验日期:2020.5.24 实验时间:8:30-12:00 :方小柒学号:********** 年级:19级专业:化学类 实验题目:三线摆测刚体转动惯量 一、实验目的: 1.学会用三线摆法测定物体转动惯量原理和方法。 2.学会时间、长度、质量等基本物理量的测量方法以及仪器的水平调节。 二、实验仪器: 三线摆,待测物体(圆环和两个质量和形状相同圆柱),游标卡尺,米尺,电子秒表,水平仪 三、实验原理: 转动惯量是物体转动惯性的量度,物体对某轴的转动惯量越大,则绕该轴转动时,角速度就越难改变。 三线摆装置如图所示,上下两盘调成水平后,两盘圆心在同一垂直线O1O2上。下盘可绕中心轴线O1O2扭转,其扭转周期T和下盘的质量分布有关,当改变下盘的质量分布时,其绕中心轴线O1O2的扭转周期将发生变化。 三线摆就是通过测量它的扭转周期去求任意质量已知物体的转动惯量的。 三摆线示意图 当下盘转动角度θ很小,且略去空气阻力时,悬线伸长不计,扭摆的运动可近似看作简谐运动。根据能量守恒定律和刚体转动定律均可以得出物体绕中心轴OO′的转动惯量: 下盘:J =
下盘+圆环:J1= 圆环:J= J1- J0= (条件:θ≤5°,空气阻力不计,悬线伸长不计,圆环与下盘中心重合) 因此,通过长度、质量和时间的测量,便可求出刚体绕某 轴的转动惯量。 四、实验容: 1.了解三线摆原理以及有关三线摆实验器材的知识。 2.用三线摆测量圆环的转动惯量,并验证平行轴定理 (1)测定仪器常数H、R、r 恰当选择测量仪器和用具,减小测量不确定度。自拟实验步骤,确保三线摆上、下圆盘的水平,是仪器达到最佳测量状态。 (2)测量下圆盘的转动惯量 线摆上方的小圆盘,使其绕自身转动一个角度,借助线的力使下圆盘作扭摆运动,而避免产生左右晃动。自己拟定测量下圆盘转动惯量的方法。 (3)测量圆环的转动惯量 盘上放上待测圆环,注意使圆环的质心恰好在转动轴上,测量圆环的质量和、外直径。利用公式求出圆环的转动惯量。 (4)验证平行轴定理 将质量和形状尺寸相同的两金属圆柱体对称地放在下圆盘上。测量圆柱体质心到中心转轴的距离。计算圆柱体的转动惯量。 五、实验步骤: Ⅰ、流程简述:一、测三线摆空盘的转动惯量: 1.调节仪器:使用水平仪,调整上盘和下盘使它们保持水平。 2.分别测出上盘、下盘的半径r, R,以及两盘之间的高度H。 3.启动振动和测量周期:用秒表测出10次全振动所需的时间,重复5次,计算出平均周期。 4.利用测得周期,带入计算。 5.与圆盘的理论值比较,J 0=m R2/2,求出相对误差。 二、测圆环的转动惯量: 1.把圆环放在下盘中,注意使环的质心恰好在转动轴上,重复以上步骤,测出载有圆环的转动周期,根据公式计算转动惯量。 2.用游标卡尺分别测出圆环的、外半径R和R外,计算理论结果J理论=(R2+ R 外 2)m/2。 3.将实验值和理论值相比较,给出相对误差。 Ⅱ、线上操作:
实验4 用三线摆测定物体的转动惯量
实验4 用三线摆测定物体的转动惯量 [摘要] 转动惯量是表征刚体转动特性的物理量,是刚体转动惯性大小的量度,它与刚体质量的大小、转轴的位置和质量对于转轴的分布等有关。对于形状简单的刚体,可以通过数学方法计算出它绕特定转轴的转动惯量。但对于形状复杂的刚体,用数学方法计算它的转动惯量就非常困难,有时甚至不可能,所以常用实验方法测定。因此,学会测定刚体转动惯量的方法,具有实用意义。测定刚体转动惯量的方法有多种,本实验采用三线扭摆法。 [实验目的、要求] 学会用三线扭摆法测定物体的转动惯量。 [实验原理] 1、定悬盘绕中心轮的转动惯量I。三线摆如 图一所示,有一均匀圆盘,在小于其周界的同心圆 周上作一内接等边三角形,然后从三角形的三个顶 点引出三条金属线,三条金属线同样对称地连接在 置于上部的一个水平小圆盘的下面,小圆盘可以绕 自身的垂直轴转动。当均匀圆盘(以下简称悬盘) 水平,三线等长时,轻轻转动上部小圆盘,由于悬 线的张力作用,悬盘即绕上下圆盘的中心连线轴 00‘周期地反复扭转运动。当悬盘离开平衡位置向 某一方向转动到最大角位移时,整个悬盘的位置也 随着升高h。若取平衡位置的位能为零,则悬盘升 高h时的动能等于零,而位能为: 式中m是悬盘的质量,g是重力加速度。转动的悬盘在达到最大角位移后将向相反的方向转动,当它通过平衡位置时,其位能和平衡动能为零,而转动动能为: 式中I。为悬盘的转动惯量,ω 为悬盘通过平衡位置时的角速度。如果略去摩擦力的影 响,根据机械能守衡定律,E 1=E 2 ,即 mgh(1)若悬盘转动角度很小,可以证明悬盘的角位移与时间的关系可写成: 式中θ是悬盘在时刻t的位移,θ 是悬盘的最大角位移即角振幅,T是周期。
遥感实验报告
遥感原理与应用 实验报告 姓名:学号:学院:专业: 年月日 实验一: erdas视窗的认识实验 一、实验目的 初步了解目前主流的遥感图象处理软件erdas的主要功能模块,在此基础上,掌握几个视窗操作模块的功能和操作技能,为遥感图像的几何校正等后续实习奠定基础。 二、实验步骤 打开imagine 视窗 启动数据预处理模块 启动图像解译模块 启动图像分类模块 imagine视窗 1.数据预处理(data dataprep) 2.图像解译(image interpreter) 主成份变换 色彩变换 3.图像分类(image classification) 非监督分类 4. 空间建模(spatial modeler) 模型制作工具 三、实验小结 通过本次试验初步了解遥感图象处理软件erdas的主要功能模块,在此基础上,基本掌握了几个视窗操作模块的功能和用途。为后续的实验奠定了基础。 实验二遥感图像的几何校正 掌握遥感图像的纠正过程 二、实验原理 校正遥感图像成像过程中所造成的各种几何畸变称为几何校正。几何校正就是将图像数据投影到平面上,使其符合地图投影系统的过程。而将地图投影系统赋予图像数据的过程,称为地理参考(geo-referencing)。由于所有地图投影系统都遵循一定的地图坐标系统,因此几何校正的过程包含了地理参考过程。 几何校正包括几何粗校正和几何精校正。地面接收站在提供给用户资料前,已按常规处理方案与图像同时接收到的有关运行姿态、传感器性能指标、大气状态、太阳高度角对该幅图像几何畸变进行了几何粗校正。利用地面控制点进行的几何校正称为几何精校正。一般地面站提供的遥感图像数据都经过几何粗校正,因此这里主要进行一种通用的精校正方法的实验。该方法包括两个步骤:第一步是构建一个模拟几何畸变的数学模型,以建立原始畸变图像空间与标准图像空间的某种对应关系,实现不同图像空间中像元位置的变换;第二步是利用这种对应关系把原始畸变图像空间中全部像素变换到标准图像空间中的对应位置上,完成标准图像空间中每一像元亮度值的计算。 三、实验内容 根据实验的数据,对两张图片进行几何纠正 四、实验流程
三线摆测量物体的转动惯量实验过程分析和实验数据处理
三线摆测物体的转动惯量 7.预习思考题回答 (1)用三线摆测刚体转动惯量时,为什么必须保持下盘水平? 答:扭摆的运动可近似看作简谐运动,以便公式推导,利用根据能量守恒定律和刚体转动定律均可导出物体绕中心轴的转动惯量公式。 (2)在测量过程中,如下盘出现晃动,对周期有测量有影响吗?如有影响,应如何避免之? 答:有影响。当三线摆在扭动的同时产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差,其误差的大小是与晃动的轨迹以及幅度有关的。 (3)三线摆放上待测物后,其摆动周期是否一定比空盘的转动周期大?为什么? 答:不一定。比如,在验证平行轴定理实验中,d=0,2,4,6cm 时三线摆周期比空盘小;d=8cm 时三线摆周期比空盘大。 理论上,22010002 [()]04x gRr I I I m m T m T H π=-= +-> 所以2 2 000()0m m T m T +->= 〉0/T T > 1<,并不能保证0/1T T >,因此放上待测物后周期不一定变大。 (4)测量圆环的转动惯量时,若圆环的转轴与下盘转轴不重合,对实验结果有何影响? 答:三线摆在扭摆时同时将产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差。 8.数据记录及处理 表 1 待测刚体的有关尺寸数据的记录及简单计算 g(重力加速度)= 9.793 m/s 2 m 0(圆盘) = 380 g m 1(圆环) = 1182 g m 21(圆柱)= 137 g m 22(圆柱)= 137 g x(两圆柱离中心距离)= 4.50 cm
三线摆测量物体的转动惯量实验过程分析和实验数据处理
三线摆测量物体的转动惯量实验过程分析和实验数据处理
三线摆测物体的转动惯量 7.预习思考题回答 (1)用三线摆测刚体转动惯量时,为什么必须保持下盘水平? 答:扭摆的运动可近似看作简谐运动,以便公式推导,利用根据能量守恒定律和刚体转动定律均可导出物体绕中心轴的转动惯量公式。 (2)在测量过程中,如下盘出现晃动,对周期有测量有影响吗?如有影响,应如何避免之? 答:有影响。当三线摆在扭动的同时产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差,其误差的大小是与晃动的轨迹以及幅度有关的。 (3)三线摆放上待测物后,其摆动周期是否一定比空盘的转动周期大?为什么? 答:不一定。比如,在验证平行轴定理实验中,d=0,2,4,6cm 时三线摆周期比空盘小;d=8cm 时三线摆周期比空盘大。 理论上,22010002 [()]04x gRr I I I m m T m T H π=-= +-> 所以2 2 000()0m m T m T +->=〉000//()T T m m m >+ 00/()1m m m +<,并不能保证0/1T T >,因此放上待测物后周期不一定变大。 (4)测量圆环的转动惯量时,若圆环的转轴与下盘转轴不重合,对实验结果有何影响? 答:三线摆在扭摆时同时将产生晃动时,这时下圆盘的运动已不是一个简谐振动,从而运用公式测出的转动惯量将与理论值产生误差。 8.数据记录及处理 g(重力加速度)= 9.793 m/s 2 m 0(圆盘) = 380 g m 1(圆环) = 1182 g m 21(圆柱)= 137 g m 22(圆柱)= 137 g x(两圆柱离中心距离)= 4.50 cm
遥感图像实验报告
遥感图像实验报告 一.实验目的 1、初步了解目前主流的遥感图象处理软件ERDAS的主要功能模块。 2、掌握Landsat ETM遥感影像数据,数据获取手段.掌握遥感分类的方法, 土地利用变化的分析,植被变化分析,以及利用遥感软件建模的方法。 3、加深对遥感理论知识理解,掌握遥感处理技术平台和方法。 二.实验内容 1、遥感图像的分类 2、土地利用变化分析,植被变化分析 3、遥感空间建模技术 三.实验部分 1.遥感图像的分类 (1)类别定义:根据分类目的、影像数据自身的特征和分类区收集的信息确定分类系统; (2)特征判别:对影像进行特征判断,评价图像质量,决定是否需要进行影像增强等预处理; (3)样本选择:为了建立分类函数,需要对每一类别选取一定数目的样本;(4)分类器选择:根据分类的复杂度、精度需求等确定哪一种分类器; (5)影像分类:利用选择的分类器对影像数据进行分类,有的时候还需要进行分类后处理;分类图如下:
图1.1 1992年土地利用图 图1.2 2001年土地利用图
(6)结果验证:对分类结果进行评价,确定分类的精度和可靠性。 图1.3 1992年精度图 图1.4 2002年精度图 2.土地利用变化 2.1 两年土地利用相重合区域 (1)在两年的遥感影像中选择相同的区域。 Subset(x:568121~684371,y:3427359~3288369),过程如下:
图2.1 截图过程图 图2.2.2 截图过程图
(2)土地利用专题地图如下: 图2.2.3 1992年专题地图 图2.2.4 2001年土地利用图
实验3.1 三线摆法测量物体的转动惯量讲义和表格
实验 三线摆法测量物体的转动惯量 转动惯量是刚体转动惯性大小的量度,是表征刚体特征的一个物理量。转动惯量的大小除与物体质量有关外,还与转轴的位置和质量分布(即形状、大小和密度)有关。如果刚体形状简单,且质量分布均匀,可以直接计算出它绕特定轴的转动惯量。但是工程实践中,我们常常碰到大量的形状复杂,且质量分布不均匀刚体,理论计算将极其复杂,通常采用实验方法来测定。 转动惯量的测量,一般都是使刚体以一定的形式运动。通过表征这种运动特征的物理量与转动惯量之间的关系,进行转换测量。测量刚体转动惯量的方法有多种,三线摆法具有设备简单、直观、测试方便的优点。 一.实验目的 1. 学会用三线摆测量物体的转动惯量。 2. 学会用积累放大法测量周期运动的周期。 3. 验证转动惯量的平行轴定理。 二. 实验仪器 DH4601转动惯量测试仪,计时器,圆环,圆柱体,游标卡尺,米尺,水准仪 三. 实验原理 图1是三线摆实验装置的示意图。上、下圆盘均处于水平,悬挂在横梁上。三个对称分布的等长悬线将两圆盘相连。上圆盘固定,下圆盘转动角很小,且略去空气阻力时,扭摆的运动可以近似的看作简谐运动。根据能量守恒定律和刚体的转动定律均可以导出物体绕中心轴OO ’的转动惯量(推导过程见附录): 2 00 2004T H gRr m I π= (1-1) 式中各物理量的含义如下: 0m 为下盘的质量 r 、R 分别为上下悬点离各自圆盘中心的距离 0H 为平衡时上下盘间的垂直距离 0T 为下盘作简谐运动的周期,g 为重力加速度。 将质量为m 的待测圆环放在下盘上,并使待测圆环的转轴与OO ’轴重合。测出此时摆运动的周期1T 和上下圆盘间的垂直距离H 。那么,可以求得待测刚体和下圆盘对中心转轴 图1 三线摆实验示意图
用三线摆测量转动惯量
用三线摆测转动惯量 转动惯量是刚体转动惯性的量度,它与刚体的质量分布和转轴的位置有关。对于形状简单的均匀刚体,测出其外形尺寸和质量,就可以计算其转动惯量。对于形状复杂、质量分布不均匀的刚体,通常利用转动实验来测定其转动惯量。为了便于与理论计算值比较,实验中的被测刚体均采用形状规则的刚体。 一、实验目的 1. 加深对转动惯量概念和平行轴定理等的理解; 2. 了解用三线摆测转动惯量的原理和方法; 3. 掌握周期等量的测量方法 二、实验仪器 DHTC-1A 三线摆实验仪、DHTC-3B 多功能计时器、水准仪、卷尺、游标卡尺、物理天平及待测物体等。 三、实验原理 一、三线摆介绍 图1是三线摆示意图。上、下圆盘 均处于水平,悬挂在横梁上。横梁由立 柱和底座(图中未画出)支承着。三根 对称分布的等长悬线将两圆盘相连。拨 动转动杆就可以使上圆盘小幅度转动, 从而带动下圆盘绕中心轴OO '作扭摆 运动。当下圆盘的摆角θ很小,并且忽 略空气摩擦阻力和悬线扭力的影响时, 根据能量守恒定律或者刚体转动定律都 可以推出下圆盘绕中心轴OO '的转动 惯量0J 为 (1) 式中,m 0为下圆盘的质量;r 和R 分别为上下悬点离各自圆盘中心的距离;H 0为平衡时上下圆盘间的垂直距离;T 0为下圆盘的摆动周期,g 为重力加速度。阿克苏地区的重力加速度为9.8015ms -2。 将质量为m 的待测刚体放在下圆盘上,并使它的质心位于中心轴OO '上。 图1 三线摆示意图 2 00200T H 4gRr m J π=
测出此时的摆动周期T 和上下圆盘间的垂直距离H ,则待测刚体和下圆盘对中心轴的总转动惯量J 1为 2 201T H 4gRr )m m (J π+= (2) 待测刚体对中心轴的转动惯量J 与J 0和J 1的关系为 J= J 1-J 0 (3) 利用三线摆可以验证平行轴定理。平行轴定理指出:如果一刚体对通过质心的某一转轴的转动惯量为J c ,则这刚体对平行于该轴、且相距为d 的另一转轴的转动惯量J x 为 J x =J c +md 2 (4) 式中,m 为刚体的质量。 实验时,将二个同样大小的圆柱体放置在对称 分布于半径为R 1的圆周上的二个孔上,如图2所 示。测出二个圆柱体对中心轴OO '的转动惯量J x 。 如果测得的J x 值与由(4)式右边计算得的结果比 较时的相对误差在测量误差允许的范围内(≤5%), 则平行轴定理得到验证。 四、实验任务 1、用三线摆测定下圆盘对中心轴OO '的转动惯量和圆柱体对其质心轴的 转动惯量。要求测得的圆柱体的转动惯量值与理论计算值(21mr 2 1 J = ,r 1为圆 柱体半径)之间的相对误差不大于5%。 2、用三线摆验证平行轴定理。 五、实验注意事项 1、测量前,根据水准泡的指示,先调整三线摆底座台面的水平,再调整三线摆下圆盘的水平。测量时,摆角θ尽可能小些,以满足小角度近似。防止三线摆在摆动时发生晃动,以免影响测量结果。 2、测量周期时应合理选取摆动次数。对三线摆,测得R 、r 、m 0和H 0后,由(1)式推出J 0的相对误差公式,使误差公式中的2?T 0/ T 0项对?J 0/J 0的影响比其它误差项的影响小作为依据来确定摆动次数。估算时,?m 0取0.02g ,时间测量误差?t 取0.03s ,?R 、?r 和?H 0可根据实际情况确定。 图2 二孔对称分布
遥感图像预处理实验报告
实验前准备:遥感图像处理软件认识 1、实验目的与任务: ①熟悉ENVI软件,主要是对主菜单包含内容的熟悉; ②练习影像的打开、显示、保存;数据的显示,矢量的叠加等。 2、实验设备与数据 设备:遥感图像处理系统ENVI4.4软件; 数据:软件自带数据和河南焦作市影响数据。 3、实验内容与步骤: ⑴ENVA软件的认识 如上图所示,该软件共有12个菜单,每个菜单都附有下拉功能,里面分别包含了一些操作功能。 ⑵打开一幅遥感数据 选择File菜单下的第一个命令,通过该软件自带的数据打开遥感图像,可知,打开一幅遥感影像有两种显示方式。一种是灰度显示,另一种是RGB显示。 Gray(灰度显示)RGB显示 ⑶保存数据 ①选择图像显示上的File菜单进行保存; ②通过主菜单上的Save file as进行保存
⑷光谱库数据显示 选择Spectral > Spectral Libraries > Spectral Library Viewer。将出现Spectral Library Input File 对话框,允许选择一个波谱库进行浏览。点 击“Open Spectral Library”,选择某一所需的 波谱库。该波谱库将被导入到Spectral Library Input File 对话框中。点击一个波谱库的名称, 然后点击“OK”。将出现Spectral Library Viewer 对话框,供选择并绘制波谱库中的波谱曲线。 ⑸矢量化数据 点选显示菜单下的Tools工具栏,接着选择下面的第四个命令,之后选择第一个命令,对遥感图像进行矢量化。点击鼠标左键进行区域选择,选好之后双击鼠标右键,选中矢量化区域。 ⑹矢量数据与遥感影像的叠加与切割 选择显示菜单下的Tools工具,之后点选第一个 Link命令,再选择其下面的第一个命令,之后 OK,结束程序。 选择主菜单下的Basic Tools 菜单,之后选择 其中的第二个命令,在文件选择对话框中,选择 输入的文件(可以根据需要构建任意子集),将 出现Spatial Subset via ROI Parameters 对 话框通过点击矢量数据名,选择输入的矢量数 据。使用箭头切换按钮来选择是否遮蔽不包含在 矢量数据中的像元。 遥感图像的辐射定标 1、实验目的与任务: ①了解辐射定标的原理; ②使用ENVI软件自带的定标工具定标; ③学习使用波段运算进行辐射定标。 2、实验内容与步骤: ⑴辐射定标的原理 辐射定标就是将图像的数字量化值(DN)转化为辐射亮度值或者反射率或者表面温度等
大学物理实验《用三线摆测量刚体的转动惯量》
图1三线摆实验装置示意图 图2 三线摆原理图 实验七 用三线摆测量刚体的转动惯量 【实验目的】 1. 学会正确测量长度、质量和时间。 2. 学习用三线摆测量圆盘和圆环绕对称轴的转动惯量。 【实验器材】 三线摆仪、米尺、游标卡尺、数字毫秒计、气泡水平仪、物理天平和待测圆环等。 【实验原理】 转动惯量是刚体转动时惯性大小的量度,它与刚体的质量分布和转轴的位置有关。对于质量分布均匀、外形不复杂的刚体,测出其外形尺寸及质量,就可以计算出其转动惯量;而对于外形复杂、质量分布不均匀的刚体,其转动惯量就难以计算,通常利用转动实验来测定。三线摆就是测量刚体转动惯量的基本方法之一。 图1是三线摆实验装置示意图。三线摆是由上、下两个匀质圆盘,用三条等长的摆线(摆线为不易拉伸的细线)连接而成。上、下圆盘的系线点构成等边三角形,下盘处于悬挂状态,并可绕OO ‘ 轴线作扭转摆动,称为摆盘。由于三线摆的摆动周期与摆盘的转动惯量有一定关 系,所以把待测样品放在摆盘上后,三线摆系统的摆动周期就要相应的随之改变。这样,根据摆动周期、摆动质量以及有关的参量,就能求出摆盘系统的转动惯量。 设下圆盘质量为0m ,当它绕OO ' 扭转的最大角位移为o θ时,圆盘的中心位置升高h ,这时 圆盘的动能全部转变为重力势能,有: gh m E P 0= (g 为重力加速度)
当下盘重新回到平衡位置时,重心降到最低点,这时最大角速度为0ω,重力势能被全部转变为动能,有: 2002 1ωI E K = 式中0I 是下圆盘对于通过其重心且垂直于盘面的OO ‘ 轴的转动惯量。 如果忽略摩擦力,根据机械能守恒定律可得: 20002 1ωI gh m = (1) 设悬线长度为l ,下圆盘悬线距圆心为R 0,当下圆盘转过一角度0θ时,从上圆盘B 点作下圆盘垂线,与升高h 前、后下圆盘分别交于C 和C 1,如图2所示,则: 1 2 !21)()(BC BC BC BC BC BC h +-= -= 因为 2 2 2 2 2 )()()()(r R AC AB BC --=-= 所以 1 2 102sin 4)cos 1(2BC BC Rr BC BC Rr h +=+-= θθ 在扭转角0θ很小,摆长l 很长时,sin 2 2 θθ≈ ,而BC+BC 1≈2H ,其中 H=2 2)(r R l -- 式中H 为上下两盘之间的垂直距离,则 H Rr h 220θ= (2) 由于下盘的扭转角度0θ很小(一般在5度以内),摆动可看作是简谐振动。则圆盘的角位移与时间的关系是 t T 0 02sin π θθ= 式中,θ 是圆盘在时间t 时的角位移,0θ是角振幅,0T 是振动周期,若认为振动初位相是零,则角速度为: )cos 2()()()(022********θRr r R C A B A BC -+-=-=
《用三线摆法测定物体的转动惯量》简明实验报告
《用三线摆法测定物体的转动惯量》的示范报告 一、教学目的: 1、学会用三线摆测定物体圆环的转动惯量; 2、学会用累积放大法测量周期运动的周期; 4、学习运用表格法处理原始数据,进一步学习和巩固完整地表示测量结果; 5、学会定量的分析误差和讨论实验结果。 二、实验仪器: 1.FB210型三线摆转动惯量测定仪 2.米尺、游标卡尺、水平仪、小纸片、胶带 3.物理天平、砝码块、各种形状的待铁块 三、实验原理 通过长度、质量和时间的测量,便可求出刚体绕某轴的转动惯量。 四、实验内容 1.用三线摆测定圆环对通过其质心且垂直于环面轴的转动惯量。 2.用三线摆验证平行轴定理。实验步骤要点如下: (1)调整下盘水平:将水准仪置于下盘任意两悬线之间,调整小圆盘上的三个旋钮,改变三悬线的长度,直至下盘水平。 (2)测量空盘绕中心轴OO?转动的运动周期T0:设定计时次数,方法为按“置数”键后,再按“下调”或“上调”键至所需的次数,再按“置数”键确定。轻轻转动上盘,带动下盘转动,这样可以避免三线摆在作扭摆运动时发生晃动。注意扭摆的转角控制在5o左右,摆动数次后,按测试仪上的“执行”键,光电门开始计数(灯闪)到给定的次数后,灯停止闪烁,此时测试仪显示的计数为总的时间,从而摆动周期为总时间除以摆动次数。进行下一次测量时,测试仪先按“返回”键。 (3)测出待测圆环与下盘共同转动的周期T1:将待测圆环置于下盘上,注意使两者中心重合,按同样的方法测出它们一起运动的周期T 1。 (4)测出上下圆盘三悬点之间的距离a和b,然后算出悬点到中心的距离r和R(等边三角形外接圆半径) (5)其它物理量的测量:用米尺测出两圆盘之间的垂直距离H0和放置两小圆柱体小孔间距2x;用游标卡尺测出待测圆环的内、外直径2R1、2R2。 (6)用物理天平测量圆环的质量。 五、实验数据记录与处理: 1.实验数据记录
三线摆测物体转动惯量
二线摆测物体转动惯量 本实验是大学物理实验中的基本实验之一,刚体转动惯量是理论力学中一个基本物理量。转动惯量是描述刚体转动中惯性大小的物理量,它与刚体的质量分布及转轴位置有关。正确测定物体的转动惯量,在工程技术中有着十分重要的意义。其在工业制造及产品设计中有着重要意义。 测刚体转动惯量的方法很多,如三线摆、扭摆等方法。为了使教学仪器和教学内容更好地反映现代科学技术,采用了IM —1新型转动惯量测定仪,该仪器采用现代新发展地集成霍尔开关传感器, 结合多功能数字式智能毫秒仪,测定悬盘地扭转周期。通过实验使学生掌握霍尔传感器地特性及在自动测量和自动控制中的作用,多功能数字式智能毫秒仪具有记忆功能,从悬盘扭转摆动开始直到设定的次数为止,均可查阅相应次数所用的时间,特别适合试验者深入研究。仪器直观性强,测量准确度高。学生动手内容多,传感器、电源等均有保护装置,不易损坏,是传统实验采用现代技术的典型实例。 下面重点介绍三线摆测刚体转动惯量的方法。通过本实验,可以加深对该物理量的理解,掌握一些基本的实验方法及一些基本的仪器设计思路。以及如何解决一些实验问题。同时通过该实验。掌握作图法处理数据,了解霍尔开关在物理实验中的一些应用。 [教学要求] 1.理解转动惯量的物理意义。 2?掌握三线摆测量转动惯量的测量方法。 3?了解转动惯量的多种测量方法。 4?加深霍尔开关在力学实验中的应用,启发学生对实验方法、手段、仪器改革的思考。 5?区别霍尔开关与霍尔元件。 6.掌握数据处理的方法之一——作图法。 7?理解理论计算与实验测量。 [教学重点] 1?掌握转动惯量的多种测量方法,理解其物理意义。 2.掌握完整的实验过程。 3?加深霍尔开关对力学实验方法与手段更新的影响,区别其它传感器在力学中的应用。
遥感数字图像处理实验报告
实验一 遥感图像统计特性 一、实验目的 掌握遥感图像常用的统计特性的意义和作用,能运用高级程序设计语言实现遥感图像统 计参数的计算。 二、实验内容 编程实现对遥感图像进行统计特性分析,均值、方差(均方差)、直方图、相关系数等。 三、实验原理 1.均值 像素值的算术平均值,反映图像中地物的平均反射强度。 11 00 (,) N M j i f i j f MN --=== ∑∑ 2.方差(或标准差) 像素值与平均值差异的平方和,反映了像素值的离散程度。也是衡量图像信息量大小的 重要参数。 11 2 00 2[(,)] N M j i f i j f MN σ--==-= ∑∑ 3. 相关系数 反映了两个波段图像所包含信息的重叠程度。f , g 分别为两个波段的图像,它们之间的 相关系数计算公式为: 11 [((,))((,))] (,)M N f g f i j e g i j e C f g ---?-= ∑∑ 其中, e f , e g 分别为两个波段图像的均值。 四、实验步骤和内容 1.实验代码 clc clear all I =imread ('m1.jpg'); whos I %显示图像信息 figure (1),imshow (I ); R =double (I (:,:,1)); G =double (I (:,:,2)); B =double (I (:,:,3)); %求图像的R,G,B 的均值,avg=mean(mean(I))
%求图像的R,G,B的均值 mean(R(:)) mean(G(:)) mean(B(:)) %求R,G,B的方差 varR=var(R(:)); varG=var(G(:)) varB=var(B(:)) %求RG,RB,GB的相关系数 corrcoef(R(:),G(:)) corrcoef(R(:),B(:)) corrcoef(B(:),G(:)) 2.原始图像 Figure 1原始图像3.实验结果 R,G,B的均值
遥感图像光谱增强处理实验报告
一、实验名称 遥感图像光谱增强处理 二、实验目的 对图像进行主成分分析、主成分变换以及主成分百分比计算;观察图像在不同色彩空间之间相互转换的结果异同,对图像进行融合,用MODEL MAKER 建模方式进行图像处理。 通过以上操作初步掌握图像光谱增强处理过程,进一步理解影像光谱增强中不同增强方法的原理及其增强效果的差异。 三、实验原理 光谱增强是基于多光谱数据对波段进行变换达到图像增强处理,采用一系列技术去改善图象的视觉效果,或将图象转换成一种更适合于人或机器进行分析处理的形式。有选择地突出某些对人或机器分析有意义的信息,抑制无用信息,提高图象的使用价值。 主成分分析(PCA)用多波段数据的一个线性变换,变换数据到一个新的坐标系统,以使数据的差异达到最大。对于增强信息含量、隔离噪声、减少数据维数非常有用。 使用Color Transforms 工具可以将3-波段红、绿、蓝图像变换到一个特定的彩色空间,并且能从所选彩色空间变换回RGB。两次变换之间,通过对比度拉伸,可以生成一个色彩增强的彩色合成图像。 图像融合是将多幅影像组合到单一合成影像的处理过程。它一般使用高空间分辨率的全色影像或单一波段的雷达影像来增强多光谱影像的空间分辨率。 四、数据来源 本次实验所用数据来自于国际数据服务平台;landsat4-5波段30米分辨率TM第三波段影像,投影为WGS-84,影像主要为山西省大同市恒山地区,中心纬度:38.90407 中心经度:113.11840。
五、实验过程 1.主成分分析 1)打开并显示TM影像文件,从ENVI 主菜单中,选择File →Open Image File选择影像,点击Load Band 在主窗口加载影像。 2)主菜单选择Transforms—>Principal Components—>Forward PC Rotation —>Compute New Statistics and Rotate。在弹出的Principal Components Input File 对话框中,选择图像。 3)在Forward PC Rotation Parameters对话框中在输入统计系数,选择计算矩阵(选择协方差矩阵),输出统计文件及路线,统计波段数等相关参数的设置,单击Ok。
大学物理实验用三线摆测量刚体的转动惯量
大学物理实验用三线摆测量刚体的转动惯量 Prepared on 22 November 2020
图1三线摆实验装置示意图 图2 三线摆原理图 实验七 用三线摆测量刚体的转动惯量 【实验目的】 1. 学会正确测量长度、质量和时间。 2. 学习用三线摆测量圆盘和圆环绕对称轴的转动惯量。 【实验器材】 三线摆仪、米尺、游标卡尺、数字毫秒计、气泡水平仪、物理天平和待测圆环等。 【实验原理】 转动惯量是刚体转动时惯性大小的量度,它与刚体的质量分布和转轴的位置有关。对于质量分布均匀、外形不复杂的刚体,测出其外形尺寸及质量,就可以计算出其转动惯量;而对于外形复杂、质量分布不均匀的刚体,其转动惯量就难以计算,通常利用转动实验来测定。三线摆就是测量刚体转动惯量的基本方法之一。 图1是三线摆实验装置示意图。三线摆是由上、下两个匀质圆盘,用三条等长的摆线(摆线为不易拉伸的细线)连接而成。上、下圆盘的系线点构成等边三角形,下盘处 于悬挂状态,并可绕OO ‘轴线作扭转摆动,称为摆盘。由于三线摆的摆动周期与摆盘的
转动惯量有一定关系,所以把待测样品放在摆盘上后,三线摆系统的摆动周期就要相应的随之改变。这样,根据摆动周期、摆动质量以及有关的参量,就能求出摆盘系统的转动惯量。 设下圆盘质量为0m ,当它绕OO '扭转的最大角位移为o θ时,圆盘的中心位置升高h ,这时圆盘的动能全部转变为重力势能,有: gh m E P 0= (g 为重力加速度) 当下盘重新回到平衡位置时,重心降到最低点,这时最大角速度为0ω,重力势能被全部转变为动能,有: 式中0I 是下圆盘对于通过其重心且垂直于盘面的OO ‘轴的转动惯量。 如果忽略摩擦力,根据机械能守恒定律可得: 20002 1ωI gh m = (1) 设悬线长度为l ,下圆盘悬线距圆心为R 0,当下圆盘转过一角度0θ时,从上圆盘B 点作下圆盘垂线,与升高h 前、后下圆盘分别交于C 和C 1,如图2所示,则: 因为 22222)()()()(r R AC AB BC --=-= 所以 1 2 102sin 4)cos 1(2BC BC Rr BC BC Rr h +=+-= θθ 在扭转角0θ很小,摆长l 很长时,sin 2 2 θθ≈ ,而BC+BC 12H ,其中 H=22)(r R l -- 式中H 为上下两盘之间的垂直距离,则 H Rr h 220θ= (2) 由于下盘的扭转角度0θ很小(一般在5度以内),摆动可看作是简谐振动。则圆盘的角位移与时间的关系是
《用三线摆法测定物体的转动惯量》简明实验报告.
4π 2 H 《用三线摆法测定物体的转动惯量》的示范报告 一、教学目的: 1、学会用三线摆测定物体圆环的转动惯量; 2、学会用累积放大法测量周期运动的周期; 4、学习运用表格法处理原始数据,进一步学习和巩固完整地表示测量结果; 5、学会定量的分析误差和讨论实验结果。 二、实验仪器: 1.FB210 型三线摆转动惯量测定仪 2.米尺、游标卡尺、水平仪、小纸片、胶带 3.物理天平、砝码块、各种形状的待铁块 三、实验原理 gRr J = J - J = [(m + m )T 2 - m T 2 ] 1 0 0 1 0 0 通过长度、质量和时间的测量,便可求出刚体绕某轴的转动惯量。 四、实验内容 1.用三线摆测定圆环对通过其质心且垂直于环面轴的转动惯量。 2.用三线摆验证平行轴定理。实验步骤要点如下: (1) 调整下盘水平:将水准仪置于下盘任意两悬线之间,调整小圆盘上的三个旋钮,改变三悬线的长 度,直至下盘水平。 (2) 测量空盘绕中心轴 OO 转动的运动周期 T 0:设定计时次数,方法为按“置数”键后,再按“下调”或“上 调”键至所需的次数,再按“置数”键确定。轻轻转动上盘,带动下盘转动,这样可以避免三线摆在作扭摆运 动时发生晃动。注意扭摆的转角控制在 5o 左右,摆动数次后,按测试仪上的“执行”键,光电门开始计数(灯 闪)到给定的次数后,灯停止闪烁,此时测试仪显示的计数为总的时间 ,从而摆动周期为总时间除以摆动 次数。进行下一次测量时,测试仪先按“返回”键。 (3) 测出待测圆环与下盘共同转动的周期 T 1:将待测圆环置于下盘上,注意使两者中心重合,按同样 的方法测出它们一起运动的周期 T 1。 (4) 测出上下圆盘三悬点之间的距离 a 和 b ,然后算出悬点到中心的距离 r 和 R (等边三角形外接圆半 径) (5) 其它物理量的测量:用米尺测出两圆盘之间的垂直距离 H 0 和放置两小圆柱体小孔间距 2x ;用游标 卡尺测出待测圆环的内、外直径 2R 1、2R 2。 (6) 用物理天平测量圆环的质量。 五、实验数据记录与处理: 1.实验数据记录 r = 3 a = 3.870 ± 0.002 cm , R = 3 b = 7.150 ± 0.002 cm 3 3 H 0 = 54.60 ± 0.05 cm , 下盘质量 m 0 =499.68 ± 0.10 g 待测圆环质量 m =192.260 ± 0.020 g 累积法测周期数据记录参考表格 下盘 下盘加圆环 摆动 50 次 所需 时间 50T (s ) 1 2 3 4 5 平均 71.68 72.06 71.88 71.65 71.62 71.78 1 2 3 4 5 平均 74.28 74.16 74.15 74.22 74.13 74.19 周 期 T 0=1.44 ± 0.01 s T 1= 1.48±0.01 s
遥感ENVI实验报告
目录 前言 (3) 一、实验目的 (3) 二、实验容 (3) 三、实验时间 (3) 四、组织人员 (3) 1.专题概述 (4) 2. 处理流程介绍 (4) 2.1图像获取 (4) 2.2数据读取和定标 (4) 2.3图像配准 (5) 2.4大气校正 (5) 2.5反演模型构建及模型应用 (5) 2.6植被变化 (6) 3.详细处理过程 (7) 3.1数据预处理 (7) 3.1.1安装环境小卫星数据处理补丁 (7) 3.1.2数据处理和定标 (7) 3.1.3工程区裁剪 (9) 3.1.4图像配准 (14) 3.1.5大气校正 (17) 3.1.6裁剪浑善达克区 (23) 3.2植被覆盖度反演 (27) 3.2.1计算归一化植被指数 (27) 3.2.2计算植被覆盖度 (28) 3.3植被变化监测 (29)
3.3.1植被覆盖区提取 (29) 3.3.2植被变化检测 (31) 3.4成果后期处理与应用 (32) 3.4.1植被变化区域图的背景值处理 (32) 3.4.2植被变化区域制图 (33) 实验心得 (36)
前言 一、实验目的 1、掌握ENVI软件的基本操作。 2、掌握卫星影像的预处理的基本流程。 3、通过实习,学会自己去处理一些问题。 4、进一步提高学生分析问题、解决问题的能力,增强实践技能,并培养学生勇于 动手、勤于动手、热爱本专业的思想。 5、深刻地理解和巩固基本理论知识, 掌握基本技能和动手操作能力, 提高综合观 察分析问题的能力 二、实习容 1、了解ENVI的基本操作。 2、实现影像图像的几何校正、融合、镶嵌及剪裁。 3、掌握ENVI对影像信息的提取 4、了解ENVI的一些应用分析
三线摆法测定物体的转动惯量
三线摆法测定物体的转动惯量 加灰色底纹部分是预习报告必写部分 一、调整三线摆装置 (1)调整底座水平。 (2)调整下盘水平。 (3)调整底板左上方的光电传感接收装置,使下圆盘边上的挡光杆能自由往返通过光电门槽口。 二、测量周期0T 和1T 、x T (1)接通FB213型数显计数计时毫秒仪的电源,预置20次(N )。 (2)拨动上圆盘的“转动手柄”,带动下圆盘绕中心轴'OO 作微小扭摆运动。摆动稳定
后,按毫秒仪上的“执行”键,开始计时,计时结束,毫秒仪显示出累计20个(N 个)周期的时间。重复以上测量5次,将数据记录到表1中。 (3)将圆环放在下圆盘上,使两者的中心轴线相重叠,按(2)的方法测定摆动周期1T 。 (4)将二小圆柱体对称放置在下圆盘上,用上述同样的方法测定周期x T 。 (5)测出上下圆盘三悬点之间的距离a 和b ,然后算出悬点到中心的距离r 和R 。 (6)其它物理量的测量: 【 数 据 与 结 果】 == a r 33 == b R 3 3 下盘质量=0m 待测圆环质量=m 圆柱体质量=m' =0H 1.根据以上数据,求出以下值 待测圆环的实验值:])[(42002102 01T m T m m H gRr I I I -+=-=π实验 待测圆环的理论值 :)(2 2221R R m I +=理论 圆环的百分比:%100I I ?-= 理论 理论 实验I E 平行轴定理实验值:??????-+=02204)'2(21I T H gRr m m I x x π实验, 平行轴定理理论值:22 2 1 x m'R m'x I +=理论; 平行轴百分比:%100I I ?-= 理论 理论 实验I E
实验七 用三线摆法测定物体的转动惯量
实验七 用三线摆法测定物体的转动惯量 转动惯量是刚体转动惯性大小的量度,是表征刚体特性的一个物理量。转动惯量的大小除与物体质量有关外,还与转轴的位置和质量分布(即形状、大小和密度)有关。如果刚体形状简单,且质量分布均匀,可直接计算出它绕特定轴的转动惯量。但在工程实践中,我们常碰到大量形状复杂、且质量分布不均匀刚体,理论计算将极为复杂,通常采用实验方法来测定。 转动惯量的测量,一般都是使刚体以一定的形式运动。通过表征这种运动特征的物理量与转动惯量之间的关系,进行转换测量。测量刚体转动惯量的方法有多种,三线摆法是具有较好物理思想的实验方法,它具有设备简单、直观、测试方便等优点。 一 实 验 目 的 (1)学会用三线摆测定物体的转动惯量。 (2)学会用秒表测量周期运动的周期。 (3)验证转动惯量的平行轴定理。 二 实 验 原 理 图1是三线摆实验装置的示意图。上、下圆盘均处于水平,悬挂在横梁上。三个对称分布的等长悬线将两圆盘相连。上圆盘固定,下圆盘可绕中心轴O O '作扭摆运动。当下盘转动角度很小,且略去空气阻力时,扭摆的运动可近似看作简谐运动。根据能量守恒定律和刚体转动定律均可以导出物体绕中心轴O O '的转动惯量(推导过程见本实验附录)。 2 2 004T H gRr m I π= (1) 式中各物理量的意义如下:0m 为下盘的质量;r 、R 分别为上下悬点离各自圆盘中心的距离;0 H 为平衡时上下盘间的垂直距离;T 0为下盘作简谐运动的周期,g 为重力加速度(在杭州地区g =9.793m/s 2 )。 将质量为m 的待测物体放在下盘上,并使待测刚体的转轴与O O '轴重合。测出此时下盘运动周期1T 和上下圆盘间的垂直距离H 。同理可求得待测刚体和下圆盘对中心转轴O O '轴的总转动惯量为: 2 1 2 014)(T H gRr m m I π+= (2) 如不计因重量变化而引起的悬线伸长, 则有0 H H ≈。那么,待测物体绕中心轴O O '的转动惯量为: ])[(42 002 102 01T m T m m H gRr I I I -+π= -= (3) 因此,通过长度、质量和时间的测量,便可求出刚体绕某轴的转动惯量。 用三线摆法还可以验证平行轴定理。若质量为m 的物体绕过其质心轴的转动惯量为c I ,当转轴平行移动距离x 时(如图2所示),则此物体对新轴O O '的转动惯量为2 ' mx I I c oo +=。这一结论称为转动惯量的平行轴定理。 实验时将质量均为m',形状和质量分布完全相同的两个圆柱体对称地放置在下圆盘上(下盘有对称的两排小孔)。按同样的方法,测出两小圆柱体和下盘绕中心轴O O '的转动周期x T ,则可求出每个柱体对中心转轴O O '的转动惯量: ?? ? ???-π+= 022 04)'2(21I T H gRr m m I x x (4) 如果测出小圆柱中心与下圆盘中心之间的距离x 以及小圆柱体的半径x R ,则由平行轴定理可求得 2 2 2 1x x m'R m'x I'+ = (5) 比较x I 与x I'的大小,可验证平行轴定理。 三 实 验 仪 器 三线摆(包含米尺、游标卡尺、物理天平以及待测物体)和秒表。 四 实 验 内 容 1.测定圆环对通过其质心且垂直于环面轴的转动惯量 (1)调整底座水平:调整底座上的三个螺钉旋钮,直至底板上水准仪中的水泡位于正中间。 (2)调整下盘水平:调整上圆盘上的三个旋钮(调整悬线的长度),改变三悬线的长度,直至下盘水 图1 三线摆实验装置图