算法第八章要点
第八章_RLC电路与常微分方程的解法_郑大昉

(8-18)
此方法称向后的欧拉法 此方法称向后的欧拉法. 向后的欧拉法 但向后的欧拉法并未给出其误差的改进(?). 但向后的欧拉法并未给出其误差的改进
改进的欧拉方法 折线斜率选其在 处的平均值 平均值, 若折线斜率选其在 Q(tn ) 和 Q(tn+1) 处的平均值 即:
6
其中(推导从略 其中 推导从略): 推导从略
k1 = f (Qn , tn ) ∆t k2 = f (Qn + k1, t 1 ) n+ 2 2 ∆t k3 = f (Qn + k2 , t 1 ) n+ 2 2 k4 = f (Qn + ∆tk3, tn+1)
(8-22) (8-23) (8-24) (8-25)
dQn+1 0 0 0 = f (Qn+1, In+1, tn ) = In+1 dt 0 0 dIn+1 Qn+1 0 1 0 0 = g(Qn+1, In+1, tn ) = (Va − − In+1R) dt L C
(8-38) (8-39)
0 0 Qn+1, In+1 , 由欧拉法预测出 欧拉法预测出.
欧拉方法
(8-4)
基本思路: 差分代替其微分,并通过递推法求解 代替其微分 并通过递推法求解. 基本思路 用差分代替其微分 并通过递推法求解 (8-4) 改写为 改写为: 另: 即:
∆Q = f (Q, t)∆t
(8-5) (8-6) (8-7)
∆Q Q(t + ∆t) − Q(t) = ∆t ∆t
注意: 的解对其参数的依赖十分敏感 参数的依赖十分敏感. 注意 (8-29) 的解对其参数的依赖十分敏感 即解的形式依赖于阻尼度: 即解的形式依赖于阻尼度: 阻尼度
第八章NP完全问题

P
NP
NPC
2019/3/11
计算机算法设计与分析
12
第一个NP完全的问题
Cook在1971年证明了第一个NP完全的问题。 Cook定理:布尔表达式的可满足性SAT是NP完 全的。 所谓可满足性 定理的证明由两个部分构成,第一部分是 SAT是这样的问题:给定 k个布尔 Cook 自从Cook 证明了第一个 NP完全的问题后,迄 变量 SAT ∈ x1NP , …x ,这基本是显然的。第二部分是任意 A多个 Am ,若存 今为止,已经发现了至少有 300 完全的 k的m个布尔表达式 1, …,NP 在对各个布尔变量 L ∈NP,可在多项式时间内转换为 xi的0, 1赋值,使得每个布尔 SAT问题。这 问题,但尚未证明其中任何一个是属于 P的。 表达式Ai都为真,则称布尔表达式 是一个构造证明,即将接受 L的的猜测。但遗 NDTM A1, …, 的瞬象序 Am是 这一事实,增强了人们对 P≠NP 可满足的。 列转换为一个 SAT 问题。 憾的是,这个猜测迄今仍然还只是个猜测。
2019/3/11 计算机算法设计与分析 10
多项式归结与NP困难
多项式归结显然有如下两个性质: (1) A∝B且B∈P,则A∈P。 (2) 若A∝B且B∝C,则A∝C。 定义:对于问题Q,如果任意问题Qi∈NP,都 有Qi∝Q,则称问题Q是NP困难的。 所谓NP困难的问题,是指该问题不会比NP中 的任何问题容易,至少是同样难或更难。
2019/3/11 计算机算法设计与分析 5
判定与求解
人们通常认为,判定一个问题要比求解一个问 题容易些。 但是也并非完全如此。例如TSP问题。要验证 一条周游路线是否最小和求一条最小周游路线 实际上是一样的难。 可见,“判定问题”可能跟相应问题的“求解” 有同样的难度,但不会比“求解”更难。
运筹学 第八章 图论 - 全

(a)明显为二部图,(b)也是二部图,但不明显,改画为(c) 时即可看出。
2017/7/13 11
图与网络的基本知识
次,奇点,偶点,孤立点 与某一个点vi相关联的边的数目称为 点vi的次(也叫做度),记作d(vi)。 右图中d(v1)=4,d(v3)=5,d(v5)=1。次 为奇数的点称作奇点,次为偶数的
2017/7/13
18
图与网络的基本知识
有向图 无向图
道路
回路
链
圈
道路(边的方向一致)
2017/7/13 19
图与网络的基本知识
连通图
定义10 一个图中任意两点间至少有一条链相连,则称此图为 连通图。任何一个不连通图总可以分为若干个连通子图,每 一个称为原图的一个分图(连通分支)。
连通图
2017/7/13
边,对余下的图重复这个步骤,直至无圈为止。
2、避圈法:每次增加一条边,且与已有边不构成圈,直至恰 有n-1条边为止。
2017/7/13
24
树
例1、下图是某建筑物的平面图,要求在其内部从每一房间都能走到 别的所有的房间,问至少要在墙上开多少门? 试给出一个开门的方案。
三
七
Байду номын сангаас
三 八 一 四 二 五
七 八 九 六
无向图
2017/7/13
有向图
8
图与网络的基本知识
环, 多重边, 简单图 如果边e的两个端点相重,称该边为 环。如右图中边e1为环。如果两个点 之间边多于一条,称为多重边,如右
v2 e5
多重边
e2
e1 v1
环
e3 v3
e4
图中的e4和e5,对无环、无多重边的
微机保护算法.ppt
的电阻和电抗分量,即
R U m cos u1i1 u2i2 (u1i2 u2i1 )cosTs
Im
i2 1
i2 2
2i1i2
cosTs
(8-30)
X U m sin (u1i2 u2i1 )sinTs
Im
i2 1
i2 2
2i1i2
cosTs
(8-31)
(2)通用微处理器
(3)数字式信号处理器(DSP)
2.模拟量输入(AI)接口部件 继电保护的基本输入电量是模拟性质的电信号。一次
系统的模拟电量可分为交流量、直流量以及各种非电量。 它们经过各种互感器转变为二次电信号,再由引线端子进 入微机保护装置。这些由互感器输入的模拟电信号还要正 确地变换成离散化的数字量。
1
s in kTs cosksTs
arctg
tg
kTs
2
arctg tg( kTs) 1 2 fkTs (8-4)
2 2 2
式中 2f , f 为输入信号频率; TS为采样周期,TS=1/ƒs,
ƒs为采样频率,通常要求ƒs为基波频率ƒ1的整数倍,即ƒs=Nƒ1,
(8-26)
同 理 , 由 式 (8-22) 与 式 (8-23) 相 减 消 去 ωtk 项 ,
得
UmIm
sinFra biblioteku1i 2 u 2i1 sin Ts
(8-27)
在式(8-26)中,如用同一电压的采样值相乘,或用同一 电流的采样值相乘,则 =0,此时可得
Um2
u1 2
u2 2 2u1u2
sin2 Ts
1. 矢量算法

第八章 矢量算法与场论初步·张量算法与黎曼几何初步本章包括两个部分.第一部分是矢量代数、矢量分析及其在场论中的应用.主要内容有:矢量的概念、矢量的算法与矢量的坐标表示;以矢量作为工具介绍了场论中的一些基本内容.例如梯度、散度与旋度等基本概念及其计算公式和性质,以及它们在不同坐标系中的表达式;叙述了矢量的积分定理(高斯公式、斯托克斯公式和格林公式);引进了仿射坐标系,阐述了三维空间中的协变矢量和逆变矢量,同时把这些概念推广到n 维空间中去.第二部分是张量代数、张量分析及其在黎曼几何中的应用.介绍了张量的概念和一些张量算法,然后以张量作为工具来阐述仿射联络空间的基本内容.例如,仿射联络、矢量和张量的平行移动,及协变微分法与自平行曲线等;并在n 维空间中引进度量的概念,来定义黎曼空间,从而由具有特殊条件的仿射联络引出了黎曼联络,于是有关仿射联络空间中的一些性质可以搬到黎曼空间中来.可是,因为黎曼空间是由度量定义的,所以与度量有关的一些性质在仿射联络空间中是没有的.§1 矢量算法一、 矢量代数[矢量概念] 只有大小的量称为标量(也称为数量或纯量).例如温度、时间、质量、面积、能量等都是标量.具有大小和方向的量称为矢量(也称为向量).例如力、速度、力矩、加速度、角速度、动量等都是矢量.在几何中的有向线段就是一个直观的矢量.通常用空间中的有向线段AB 来表示矢量.用长度AB 表示大小,用端点的顺序A →B 表示方向.A 称为始点,B 称为终点,这个矢量记作AB →,或用黑正体字母a 表示.矢量的大小(或长度)的数值称为它的模或绝对值,用记号AB →或|a |表示.矢量按其效能可分成三种基本类型:具有大小和方向而无特定位置的矢量称为自由矢量.例如力偶. 沿直线作用的矢量称为滑动矢量.例如作用于刚体的力. 作用于一点的矢量称为束缚矢量.例如电场强度.在这里所讨论的矢量,除特别说明外,都指自由矢量,就是说,所有方向相同,长度相等的矢量,不管始点如何,都看作相同的矢量. 模等于1的矢量称为单位矢量.模等于零的矢量称为零矢量,记作0,它是始点和终点重合的矢量. 模与矢量a 的模相等而方向相反的矢量称为a 的负矢量,记作-a .始点与原点O 重合而终点位于一点M 的矢 量OM →(图8.1)称为点M 的矢径(或向径),记作 r ,原点称为极点.如果M 的直角坐标为x ,y ,z , 则有r =→OM =(x ,y ,z )=x i +y j +z k 式中i ,j ,k 分别为x 轴,y 轴,z 轴的正向单位 矢量,称为坐标单位矢量(或基本矢量).[矢量的基本公式][加法] 若a =(a x ,a y ,a z ),b =(b x ,b y ,b z ),则a +b =( a x +b x ,a y +b y ,a z +b z )把矢量的始点移到原点O ,以a ,b 为边作平行四边行,由原点作出的对角线就表示和矢量a +b (称为平行四边形法则,见图8.2);或者把二矢量首尾相接,由始点到终点的矢量即为和矢量a +b (称为三角形法则,见图8.3).加法运算适合如下规律:=a++(交换律)bab++))+((结合律)(=bca+acba+0=0+a=a,a+(-a)=0[减法]若a=(a x,a y,a z),b=(b x,b y,b z),则a-b=(a x-b x,a y-b y,a z-b z)把矢量b的负矢量与矢量a相加,得矢量a-b(图8.4).对任意两个矢量a和b成立三角形不等式:|a+b|≤|a|+|b|[数乘]以实数λ乘矢量a称为数乘,记作λa.当λ>0时,a的模伸缩λ倍,方向保持不变;当λ<0时,a的模伸缩|λ|倍,而方向与a相反(图8.5),如果a=(a x,a y,a z)则λa=(λa x, λa y, λa z)设λ,μ为两实数,a,b为两矢量,则数乘运算适合下列规律:λ(μa)=(λμ)a (结合律)(λ+μ)a=λa+μa (分配律)λ(a+b)=λa+λb (分配律)[矢量的分解]1 设a,b,c为三个共面的矢量,而b和c为非共线矢量,如果把它们移到公共始点O,由矢量c的终点C作两条平行于a,b的直线,各交a,b(或延长线)于M,N(图8.6),则c=OM→+ON→= λa+μb这称为矢量c对a,b的分解.2 设a,b,c为非共面矢量,而d为任一矢量,把它们移到公共始点O,由矢量d的终点D作三个平面分别平行于(b,c)平面,(c,a)平面和(a,b)平面,且与a,b,c(或延长线)分别交于L,M,N(图8.7),则υd=OL→+OM→+ON→=λa+μb+c称为矢量d对a,b,c的分解.3 如果两个非零矢量a与b有线性关系λa+μb=0式中λ, μ不全为0,则称这两个矢量共线(即a//b);反之也真.称这两个矢量a,b为线性相关.4 设a,b为两个非零矢量,若λa+μb=0,则有λ=0,μ=0,这时称a,b为线性无关.5 若三个非零矢量a ,b ,c 有线性关系λa +μb +c υ=0,式中λ,μ,υ不全为零,则这三个矢量共面,反之也真.这时,称a ,b ,c 为线性相关.如果a ,b ,c 为三个非零矢量,而λa +μb +c υ=0,则有λ=μ=υ=0,这时,称a ,b ,c 为线性无关.6 四个(或四个以上)矢量a ,b ,c ,d 必有线性关系;就是说它们一定线性相关.这时,必有不全为0的四个数λ,μ,υ,ξ,成立λa +μb +c υ+ξd =0.[标量积(数量积、点积、内积)] 设a =(a x , a y , a z ),b =(bx ,by ,bz ),|a |=a ,|b |=b ,a ,b 两矢量的夹角为θ,则称数值ab cos θ为矢量a ,b 的标量积(也称为数量积、点积或内积).记作a ·b =ab =ab cos θ(0≤θ≤π)可以看作矢量a 的长度乘以矢量b 在a 上的投影的长度(图8.8). 标量积运算适合以下的规律:a ·b =b ·a (交换律) a ·(b +c )=a ·b +a ·c (分配律)(λa )·(μb )=λμa ·b (数乘的结合律)a ·a =a 2=|a |2=a 2若a ,b 为非零矢量,a ·b =0,则a ⊥b ;反之也真.i ·i =j ·j =k ·k =1,i ·j =j ·k =k ·i =0 a ·b =a x b x +a y b y +a z b z (即对应坐标相乘之和)[矢量积(叉积、外积)] 设a =(a x ,a y ,a z ),b =(b x ,b y ,b z ),|a |=a ,|b |=b ,a ,b 两矢量的夹角为θ,则定义a ×b 为两矢量的矢量积(也称为叉积或外积),它是一个矢量,即长度等于以a ,b 为边的平行四边形的面积(图8.9阴影部分) |a ×b |=ab sin θ (0≤θ≤π)它的方向垂直于两矢量a 和b ,并且a ,b ,a ×b 构成 右手系(图8.9).矢量积运算适合下列规律:a ×b =-b ×a (反交换律)(a +b )×c =a ×c +b ×c (分配律,次序不能交换)(λa )×(μb )=λμ(a ×b )[(λ+μ)a ]×b =(λ+μ)(a ×b )=λ(a ×b )+μ(a ×b )a ×a =0若a ,b 为非零矢量,则a ,b 共线(即a //b )的充分必要条件是:a ×b =0i ×i =j ×j =k ×k =0,i ×j =k ,j ×k =i ,k ×i =ja ×b =zyxz y xb b b a a a kj i=(a y b z - a z b y )i +( a z b x -a x b z )j +( a x b y -a y b x )k [两矢量的夹角]cos(a ,b )=ba ba ⋅ sin(a ,b )=ba b a ⨯[拉格朗日恒等式](a ×b )·(c ×d )=(a ·c )(b ·d )-(a ·d )(b ·c )特别 (a ×b )2=a 2b 2-(ab )2即 (a y b x - a z b y )2+( a z b x -a x b z )2+( a x b y -a y b x )2 =(a x 2+a y 2+a z 2)(bx 2+b y 2+b z 2)-(a x b x +a y b y +a z b z )2[三个矢量的混合积] 设a =(a x ,a y ,a z ),b =(b x ,b y ,b z ),c =(c x ,c y ,c z )为三个矢量,则它们的混合积定义为(abc )=a ·(b ×c )=a a a b b b c c c xy zxy z xyz=a x (b y c z -b z c y )+a y (b z c x -b x c z )+a z (b x c y -b y c x ) 混合积具有性质:1 a ·(b ×c )=(a ×b )·c 注意,一般情况下等式(a ·b )·c =a ·(b ·c ) (a ×b )×c =a ×(b ×c )不成立.2 (abc )=(bca )=(cab )=-(acb )=-(bac )=-(cba ) 即有轮换性:a ·(b ×c )=b ·(c ×a )=c ·(a ×b )=-a (c ×b )=-b (a ×c )=-c (b ×a )3 混合积(abc )是一个数,它的绝对值等于以a ,b ,c 为边的平行六面体的体积.4 三个矢量共面的充分必要条件是:(abc )=0. [三重矢积]a ×(b ×c )=(a ·c )b -(a ·b )c (a ×b )×c =(a ·c )b -(b ·c )a采用a ,b ,c 轮换法还可推出其余两个同类公式. [多重积的几个公式]a ×(b ×c )+b ×(c ×a )+c ×(a ×b )=0(a ×b )·(c ×d )=db c b d a c a ⋅⋅⋅⋅=(a ·c )(b ·d )-(a ·d )(b ·c )(a ×b )×(c ×d )=(abd )c -(abc )d =(cda )b -(cdb )a a ×[b ×(c ×d )]=(b ·d )(a ×c )-(b ·c )(a ×d )(a ×b b ×c c ×a )=(abc )2(a 1a 2a 3)(b 1b 2b 3)=332313322212312111b a b a b a b a b a b a b a b a b a (a ×b c ×d e ×f )=(abd )(cef )-(abc )(def )二、 矢量分析1.矢量微分[矢函数] 对于自变量t (标量)的每一个数值都有变动矢量a 的确定量(长度与方向都确定的一个矢量)和它对应,则变(矢)量a 称为变量t 的矢函数,记作a =f (t )矢函数也可表为a =a x i +a yj +a z k式中a x =f x (t ),a y =f y(t ),a z =f z (t )为三个标函数.若把变动矢量表成点M 的矢径形式r =r (t )则当t 变动时,点M 在空间中描出一条曲线,称为矢函数的矢端曲线.它的坐标由三个等式给定:r =x i +y j +z kx =x (t ),y =y (t ),z =z (t ) [矢函数的极限与连续性] 若对任意给定的ε>0 , 都存在数δ>0,使得当t -t 0<δ时r (t )-r 0<ε成立,则称r 0为矢函数r (t )当t →t 0时的极限,记作()t t t r 0lim →= r 0若()t t t r 0lim →存在,则()t t t r 0lim →=()lim t t x t →0i +()lim t t y t →0j +()lim t t z t →0k若 ()t t t r 0lim →= r (t 0),则称矢函数r (t )在t =t 0处连续.[矢函数的导数与微分] 如果极限()()tt t t t ∆-∆+→∆f f 0lim存在,就称它为矢函数a =f (t)的导数,记作td d a .矢函数a =f (t )的导数仍为矢函数,从而还可求它的导数,即二阶导数,记作22d d t a ,等等.d a =td d a d t称为矢函数a =f (t )的微分. [矢函数求导公式]td d c =0 (c 为常矢量) td d(k a )=k t d d a (k 为常数)td d(a +b +c )=t t t d d d d d d c b a ++t d d (ϕa )=t d d ϕa +ϕt d d a(ϕ是t 的标函数) t d d (a ·b )=t d d a ·b +a ·td d b (顺序可以交换) t d d (a ×b )=t d d a ×b +a ×t d d b (顺序不可以交换) t d d (abc )=( t d d a bc )+(a t d d b c )+(ab td d c ) (顺序不可以交换)t d d a [ϕ(t )]=ϕd d a td d ϕ (ϕ是t 的标函数,这是复合函数的求导公式)[矢径形式的矢函数求导公式] 设r =r (t )=x (t )i +y (t )j +z (t )k表示矢函数的矢端曲线,则1 r=td d r= x i + y j + z k表示矢端曲线的切线矢量(图8.10),指向t 增加的方向,式中 x =t x d d , y =t y d d , z =tzd d2sd d r= t 式中s 为矢端曲线的弧长,t 为切线的单位矢量.3 22d d t r r = =x i + y j + z k 式中 x =22d d t x , y =22d d t y , z =22d d tz[矢函数的泰勒公式]r (t +∆t )=r (t )+r(t )∆t +r !21(t )(∆t )2+···+1n !r (n )(t )(∆t )n +()11n +!R n (∆t )n +1式中R n =x (n +1)(t 1)i +y (n +1)(t 2)j +z (n +1)(t 3)k (t < t 1 , t 2 , t 3 < t +∆t )r (n )(t )= x (n )(t )i +y (n )(t )j +z (n )(t )kx (n )=n n t x d d , y (n )=n n t y d d , z (n )=n n tz d d[矢量函数的几个常用性质]1 定长矢量r (t )⊥r(t ),反之也真.从而切线的单位矢量t的导数与原矢量垂直. 2 定向矢量r (t )//r(t ),反之也真. 3 一个变动矢量r (t )平行于一个定平面的充分必要条件是:混合积(rr r )=0 2.矢量积分[不定积分] 设a (t ),b (t )为矢函数,则矢量微分方程()tt d d b =a (t ) 的解⎰a (t )d t =b (t )+c (式中c 为任意常矢量)称为矢函数a (t )的不定积分.[定积分] 设a (t )和b (t )为矢函数,则⎰21t t a (t )d t =b (t 2)-b (t 1)称为矢函数a (t )的定积分,t 1,t 2分别称为下、上限. [平面面积矢量] 设r = r (t )=x (t )i +y (t )j +z (t )k d r =i d x +j d y +k d z则S =⎰L21r ×d r式中L 为r (t )矢端所画的闭曲线,S 为L 所包围的面积矢量,原点在闭曲线L内.。
现代信号处理第八章基于EMD的时频分析方法及其应用

目前EMD方法主要应用于一元信号处理领域,未来研究将拓展其在多元信号处理中的应用,如多 通道信号分析、多维数据融合等。
EMD在复杂系统故障诊断中的应用
复杂系统的故障诊断是信号处理领域的重要研究方向之一,未来研究将探索将EMD方法应用于复 杂系统的故障诊断中,以提高诊断的准确性和可靠性。
01 基于EMD的时频分析方 法概述
EMD方法简介
EMD(Empirical Mode Decomposition)即经验模态分解,是 一种自适应的信号处理方法。
EMD方法能够将复杂信号分解为一系列固有 模态函数(Intrinsic Mode Functions, IMFs),这些IMFs表征了信号在不同时间 尺度上的局部特征。
THANKS FOR WATCHING
感谢您的观看
图像去噪与增强技术
EMD去噪原理
基于经验模态分解(EMD) 的去噪方法通过分解图像信号 为多个固有模态函数(IMF),
有效去除噪声成分。
自适应阈值处理
结合EMD与自适应阈值技术, 实现图像噪声的智能抑制,提
高图像质量。
对比度增强
利用EMD方法对图像进行分 层处理,调整各层对比度,实
现图像整体对比度的增强。
边界效应问题
EMD方法在分解过程中,对信号两端的数据处理存在不确 定性,容易产生边界效应,影响分解结果的精度和可靠性。
发展趋势预测
自适应噪声抑制技术
针对噪声干扰问题,未来研究将更加注重自适应噪声抑制 技术的发展,以提高EMD方法在噪声环境下的性能。
改进EMD算法
为解决模态混叠问题,研究者将致力于改进EMD算法,如引入 掩膜信号、优化筛选过程等,以提高分解的准确性和稳定性。
算法导论 第八章答案
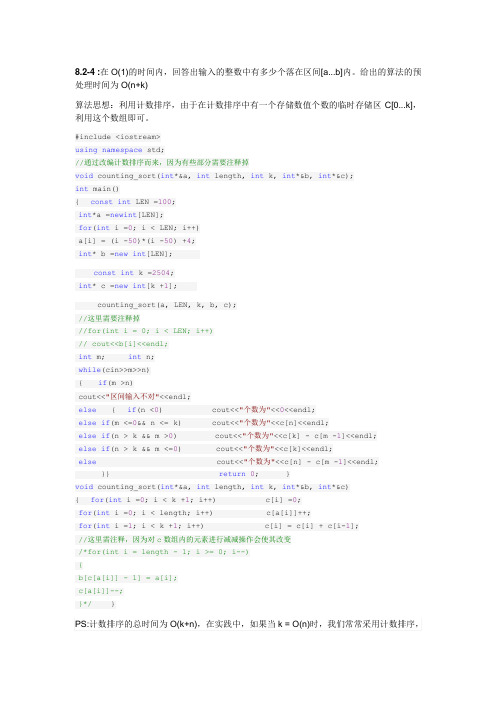
{ if(m >n)
cout<<"区间输入不对"<<endl; else { if(n <0) else if(m <=0&& n <= k) else if(n > k && m >0) else if(n > k && m <=0) else
cout<<"个数为"<<0<<endl; cout<<"个数为"<<c[n]<<endl; cout<<"个数为"<<c[k] - c[m -1]<<endl;
cout<<"个数为"<<c[k]<<endl; cout<<"个数为"<<c[n] - c[m -1]<<endl;
}}
return 0;
}
void counting_sort(int*&a, int length, int k, int*&b, int*&c)
{ for(int i =0; i < k +1; i++)
const int k =2504; int* c =new int[k +1];
counting_sort(a, LEN, k, b, c); //这里需要注释掉
//for(int i = 0; i < LEN; i++)
// cout<<b[i]<<endl;
第八章 假设开发法

20 % 50 % 30 % B 2200 50000 0.5 1.5 1 14% 1 14% 1 14% 2.5
20%
50%
30%
0 0.5
1 1.5 2
第八章
2.5 3
假设开发法
4
房地产估价
P155例8-2
V=6368.21万元
在建写字楼价格(V)=预期开发完成后价值(A)-续建费用(B) -购买税费(C)-转让税费(D) 房地产估价
在建写字楼价格(V)=预期开发完成后价值(A)-续建费用(B) -购买税费(C)-转让税费(D)
0.5 1.0 07.3 07.9 08.9
1.5
A’
a1
a2
a3 a4= a5= a6 =……
B
2500 10200
1 13%
0.75
2326 .65
房地产估价
第八章
假设开发法
P157例8-4
A 4378 .33 B 2326 .65 C V 3% 0.03V D A 6% 262 .70
V=1736.87万元 V=380000000÷10200=1702.82元/㎡
2、计息方法的特点
不考虑支出与收入发生时间不同而直接相加减,但要计算利息 不考虑预售,也不考虑延迟销售
第八章
假设开发法
房地产估价
P154例8-1
需要评估某成片生地的现时价格。已知该 成片生地的面积为2平方公里,适宜开发成熟地 后分块转让,可转让面积比率为60%;市场调查 分析获知,该类土地的小块熟地转让价为1000元 /平方米;将生地开发成熟地的周期为2年,开 发成本和管理费等为2.5亿元/平方公里,其中的 60%在第1年均匀投入,40%在第2年均匀投入, 贷款利率为10%,投资利润率为15%;当地土地 转让中买卖双方要缴纳的税费分别为转让价格 的2.0%和3.5%。试评估该成片生地的现时总价 与可转让土地单价。