摆线针轮行星减速器-毕业设计(可编辑)
毕业设计(论文)-行星轮系减速器设计[管理资料]
![毕业设计(论文)-行星轮系减速器设计[管理资料]](https://img.taocdn.com/s3/m/5371fe25b9f3f90f77c61b64.png)
第一章概述行星轮系减速器较普通齿轮减速器具有体积小、重量轻、效率高及传递功率范围大等优点,逐渐获得广泛应用。
同时它的缺点是:材料优质、结构复杂、制造精度要求较高、安装较困难些、设计计算也较一般减速器复杂。
但随着人们对行星传动技术进一步的深入地了解和掌握以及对国外行星传动技术的引进和消化吸收,从而使其传动结构和均载方式都不断完善,同时生产工艺水平也不断提高,完全可以制造出较好的行星齿轮传动减速器。
根据负载情况进行一般的齿轮强度、几何尺寸的设计计算,然后要进行传动比条件、同心条件、装配条件、相邻条件的设计计算,由于采用的是多个行星轮传动,还必须进行均载机构及浮动量的设计计算。
行星齿轮传动根据基本够件的组成情况可分为:2K—H、3K、及K—H—V三种。
若按各对齿轮的啮合方式,又可分为:NGW型、NN型、WW型、WGW型、NGWN型和N型等。
我所设计的行星齿轮是2K—H行星传动NGW型。
第二章原始数据及系统组成框图(一)有关原始数据课题: 一种自动洗衣机行星轮系减速器的设计原始数据及工作条件:使用地点:自动洗衣机减速离合器内部减速装置;传动比:p i=输入转速:n=2600r/min输入功率:P=150w行星轮个数:n=3w内齿圈齿数z=63b(二)系统组成框图洗涤:A 制动,B 放开,运动经电机、带传动、中心齿轮、行星轮、行星架、波轮脱水:A 放开,B 制动,运动经电机、带传动、内齿圈(脱水桶)、中心齿轮、行星架、波轮与脱水桶等速旋转。
自动洗衣机的工作原理:见图第三章减速器简介减速器是一种动力传达机构,利用齿轮的速度转换器,将马达的回转数减速到所要的回转数,并得到较大转矩的机构。
减速器降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出减速器额定扭矩。
降速同时降低了负载的惯量,惯量的减少为减速比的平方。
一般的减速器有斜齿轮减速器(包括平行轴斜齿轮减速器、蜗轮减速器、锥齿轮减速器等等)、行星齿轮减速器、摆线针轮减速器、蜗轮蜗杆减速器、行星摩擦式机械无级变速机等等。
【毕业设计】新型少齿差行星齿轮减速机设计
【关键字】毕业设计专科毕业设计文献综述院(系);机电工程系专业:数控技术班级:0902姓名:寇超学号: 00201 1年11 月12日专科生毕业设计文献综述评价表少齿差行星齿轮减速器的设计文献综述1 少齿差行星齿轮减速器的特点随着现代工业的高速发展,机械化和自动化水平的不断提高,各工业部门需要大量的减速器,并要求减速器体积小,重量轻,传动比范围大,效率高,装载能力大,运转可靠以及寿命长等。
减速器的种类虽然很多,但普通的圆柱齿轮减速器的体积大,结构笨重;普通的蜗轮减速器在大的传动比时,效率较低;摆线针轮行星减速器虽能满足以上提出的要求,但成本较高,需要专用设备制造;而渐开线少齿差行星减速器不但基本上能满足以上提出的要求,并可用通用刀具在插齿机上加工,因而成本较低。
能适应特种条件下的工作,在国防,冶金,矿山,化工,纺织,食品,轻工,仪表制造,起重运输以及建筑工程等工业部门中取得广泛的应用。
渐开线少齿差行星减速器具有以下优点:1.结构紧凑、体积小、重量轻由于采用内啮合行星传动,所以结构紧凑;当传动比相等时,与同功率的普通圆柱齿轮减速器相比,体积和重量均可减少三分之一至三分之二;2.传动比范围大N型一级减速器的传动比为10~100以上;二级串联的减速器,传动比可达一万以上;三级串联的减速器,传动比可达百万以上。
NN型一级减速器的传动比为100~1000以上;3.效率高N型一级减速器的传动比为10~100时,效率为80~94%;NN型当传动比为10~200时,效率为70~93%.效率随着传动比的增加而降低。
4.运转平稳、噪音小、装载能力大由于式内啮合传动,两啮合齿轮一位凹齿,一为凸齿,两齿的曲率中心在同一方向。
曲率半径接近相等,因此接触面积大,使轮齿的接触强度大为提高,又采用短齿制,轮齿的弯曲强度也提高了。
此外,少齿差传动时,不是一对轮齿啮合,而是3~9对轮齿同时接触受力,所以运转平稳,噪音小,并且在相同模数的情况下,其传递力矩臂普通圆周齿轮减速器大。
摆线针轮行星传动设计正文

目录摘要 (3)Abstract (4)0 文献综述 (5)0.1摆线针轮行星传动机构简介 (5)0.2摆线针轮星传动减速器的发展 (5)0.3 摆线轮减速器的研究现状 (6)1 引言 (8)1.1摆线针轮减速器的类别 (8)1.2 摆线针轮行星减速器的特点 (8)1.3本文设计内容 (8)2 摆线针轮减速器的传动原来 (9)3传动装置的总体设计 (10)3.1电动机的选择 (10)3.2 计算传动比 (11)3.3传动装置的运动和动力参数计算 (12)4传动零件的计算 (12)4.1摆线针齿啮合承载能力计算 (12)4.2摆线轮滚动轴承的承载能力计算 (17)4.3 W机构承载能力计算 (18)5轴的设计计算 (20)5.1输入轴的设计计算 (20)5.1.1轴的材料选择和最小直径估计 (20)5.1.2轴的结构设计 (21)5.1.3轴的校核计算 (21)5.2 输出轴的设计计算 (25)5.2.1轴的材料选择和最小直径估计 (26)5.2.2轴的结构设计 (26)5.2.3轴的校核计算 (27)6 其它传动零部件设计计算及校核 (29)6.1输入轴上的两轴承寿命计算 (29)6.2.键的选择 (30)6.3 联轴器的选择 (32)7润滑及密封 (33)7.1润滑 (33)7.2 密封 (33)8总结 (33)8.1 (33)8.2主要零件的三维模型 (34)9 结论 (35)参考文献 (36)致谢 (37)摆线针轮行星传动设计尧超西南大学工程技术学院,重庆 400715摘要:摆线针轮行星传动于1922年由德国学者卢布林卡提出。
由于这种传动具有结构紧凑、单级传动比大、工作平稳、噪音甚低、承载能力和效率高等一系列有点。
在许多情况下, 它可以代替二级、三级普通齿轮减速器和蜗轮蜗杆减速器。
因此广泛用于机械制造、石油化工、起重运输、地质钻探等各个部门。
本设计针对便于制造、装配和检修方面,设计了具有合理结构的摆线针轮行星减速器。
毕业设计论文----减速器毕业设计
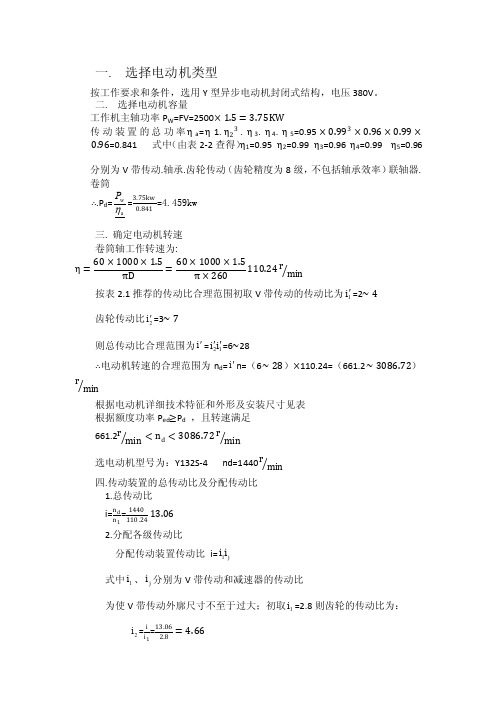
一. 选择电动机类型按工作要求和条件,选用Y 型异步电动机封闭式结构,电压380V 。
二. 选择电动机容量工作机主轴功率P W =FV=2500×1.5=3.75KW传动装置的总功率ηa =η1.η23. η3. η4. η5=0.95×0.993×0.96×0.99× 0.96=0.841 式中(由表2-2查得)η1=0.95 η2=0.99 η3=0.96 η4=0.99 η5=0.96分别为V 带传动.轴承.齿轮传动(齿轮精度为8级,不包括轴承效率)联轴器.卷筒∴.P d =w aP η=3.75kw0.841=4.459kw三. 确定电动机转速 卷筒轴工作转速为:η=60×1000×1.5πD =60×1000×1.5π×260110.24r min按表2.1推荐的传动比合理范围初取V 带传动的传动比为1i '=2∼4 齿轮传动比2i '=3∼7则总传动比合理范围为i '=21i i ''=6∼28∴电动机转速的合理范围为n d =i 'n=(6∼28)×110.24=(661.2∼3086.72)r min根据电动机详细技术特征和外形及安装尺寸见表 根据额度功率P ed ≥P d ,且转速满足 661.2r min <n d <3086.72r min 选电动机型号为:Y132S-4 nd=1440r min 四.传动装置的总传动比及分配传动比 1.总传动比 i=n d n 1=1440110.2413.062.分配各级传动比分配传动装置传动比 i=1j i i式中1i 、j i 分别为V 带传动和减速器的传动比为使V 带传动外廓尺寸不至于过大;初取1i =2.8则齿轮的传动比为: 2i =i i 1=13.062.8=4.66五.计算传动装置的运动和动力参数(1)各轴功率按工作机所需功率及传动效率进行计算 各轴的功率为:I 轴输入功率:I P 入=P d .η1=4.459×0.95=4.23kwII 轴输入功率:II P 入=I P 入.η2.η3=4.23×0.99×0.96=4.02kw III 轴输入功率:III P 入= II P 入.η2.η4=4.02×0.99×0.99=3.94KW (2)各轴的转速: I 轴的转速:n 1 =n i 1=14402.8=514.29r min II 轴的转速:n 2 =n 1i 1514.294.66=110.36r minIII 轴的转速:n 3=n 2=110.36r min(3)各轴的转矩为:I 轴的输入转矩 T 1=T d .i 1.η1=29.57×2.8×0.95=78.66N.mII 轴的输入转矩 T 2=T 1.i 2.η2.η3=78.66×4.66×0.99×0.96=348.37N.m III 轴的输入转矩 T3=T 2.η2η4=348.37×0.99×0.99=341.44N.m设计V 型带1.确定计算功率P CPC=K A .P ,已知P=5.5kw ,查表得K A =1.2 则P C =6.6kw2.选择带型 根据计算功率P C =6.6kw 和小带轮转速n 1=n d =1440r/min 查表得选A 型带3.确定V 带轮基准直径查表知A 型带的d min =75mm i=2.8 ε=0.02 n 2=14402.8=514.29r/minD d2 =n1n 2d d1 1−ε =2.8×100 1−0.02 =274.4查表 取dd1=100mm dd2=280mm 4.验算带速: V=πd d1n 160×1000π×100×144060×1000=7.54m/s5.确定带的基准长度L d 和中心距a按设计要求, 初取中心距 a 0=450mm ,符合0.7(d d1+d d2)<2(d d1+d d2) 即262.08<a 0<748.8 计算V 带的基准长度L 0 L 0=2a0+π2 (d d1+d d2)+(d d2−d d1)24a 0=2×450+π2(100+274.4)+(274.4−100)24×450=1504.708mm ≈1505mm 查表得L d =1550mm 计算实际中心距 a ≈a 0+L d −L 02=450+1550−15052=472.5mma min =a-0.015L d =472.5-0.015×1550=449.25mm a max =a+0.03L d =472.5+0.03×1550=519mm 6.验算小带轮包角 1 =1800−d d1−d d2a×57.30=1800−(274.4−100)472.5×57.30=158.850 ≈15907.确定V 带根数查表得:P 0=1.32kw △P 0=0.17kw K α=0.95 K L =0.98Z=Pc P 0=P Cp0+△P 0= 6.61.32+0.17 ×0.95×0.98=4.76所以Z=5根8.确定单根V 带的初拉力 F 0=500P C ZV2.5K α−1 +qV 2=500×6.65×7.54 2.50.95−1 +0.1×7.542=148.5N9.带传动作用在带轮轴上的压力F 0=2ZF 0sinα12=2×5×148.5×sin15902=1460N10.带轮结构设计设计斜齿轮大带轮n 2= 514.29r min ,即为减速器中的小齿轮转速n 3= 514.29r min 滚子的转速为110.36r min ,即为减速器中的大齿轮转速n 4=110.36r min 输入减速器轴的功率P 减=4.459×0.95=4.23kw ,每年工作300天(1) 取齿轮材料及热处理方法采用硬齿面,参考表;大小齿轮都用45#钢,表面淬火。
摆线针轮减速器的机座加工工艺及夹具设计_毕业设计
摆线针轮减速器的机座加工工艺及夹具设计目录摘要 (1)关键词 (1)1前言 (1)2摆线针轮减速机机座加工工艺 (2)2.1机座结构分析 (2)2.2 机座的主要技术要求 (2)2.3机座的材料与毛坯分析 (3)2.4 毛坯的种类 (4)2.5加工顺序的安排 (4)2.6定位基准的选择 (4)2.6.1定位基准选择原则 (4)2.6.2辅助定位基准 (5)2.6.3初次定位基准 (5)2.6.4定位基准转换 (6)2.6.5粗基准的选择 (6)2.6.6精基准的选择 (7)2.7机座加工工艺过程 (7)2.8加工余量的确定 (8)2.9切削用量的选择 (10)2.9.1粗加工时切削用量的选择原则 (10)2.9.2精加工时切削用量的选择原则 (11)2.9.3各工序的切削用量的确定 (12)2.10 工艺尺寸的计算 (14)2.11工时定额的计算 (15)2.11.1时间定额的内容 (15)2.11.2各工序时间定额的计算 (15)3 机座夹具的设计 (18)3.1机床夹具设计的基本要求 (18)3.2机床夹具的分类 (18)3.3 铣下底面夹具设计…………………………………………………………193.3.1工件的加工工艺分析 (19)3.3.2确定夹具的结构方案 (19)3.3.3绘制夹具总图 (22)3.4 镗主轴孔夹具设计…………………………………………………………2 33.4.1工件的加工工艺分析………………………………………………………2 33.4.2确定夹具的结构方案………………………………………………………2 33.4.3绘制夹具总图………………………………………………………………2 6 4结论 (27)参考文献 (27)致谢 (28)附录………………………………………………………………………………29摆线针轮减速器的机座加工工艺及夹具设计学生:刘瑜指导老师:陈志亮(湖南农业大学工学院,长沙 410128)摘要:本次设计的是摆线针轮减速器的机座加工工艺及其夹具设计,由于本工件的表面比较复杂,毛坯采用铸造。
SMC2-187型摆线针轮行星传动的设计

本科毕业设计(论文)通过答辩本科生毕业设计说明书(毕业论文)题目:学生姓名:学号:专业:摘要本文在对新型超小型摆线针轮行星传动减速器的基本结构进行分析的基础上,确定了齿形参数和结构尺寸的选择方法。
在转臂轴承的选用上,采用结构尺寸较小的微型轴承代替常规摆线针轮行星减速器中的无外圈圆柱滚子轴承的传统结构。
把传统的摆线针轮行星传动系统受力分析和强度校核理论,应用于这种两级超小型摆线针轮行星传动减速器的受力分析和强度校核,同时对其转臂轴承的寿命进行了精确的计算。
根据现有的理论知识基础,加上大量相关资料的阅读,设计了这种超小型两级摆线针轮行星传动减速器,确定了主要结构参数。
采用Pro/E工程软件进行三维实体造型,并转化为二维CAD工程图。
关键词:超小型摆线针轮行星传动摆线针轮行星传动减速器三维造型目录第一章绪论 (4)1.1概述 (4)1.2国内外发展现状 (4)1.3课题研究内容 (5)第二章设计方案 (6)2.1结构简介 (6)2.2机构分析 (6)2.3总体方案设计 (9)第三章参数设计 (11)3.1引言 (11)3.2原始依据 (11)3.3参数设计 (11)3.3.1电动机的选择 (11)3.3.1一级传动参数设计 (12)3.3.2二级传动参数设计 (15)第四章受力分析及强度校核 (19)4.1引言 (19)4.2 受力分析 (19)4.2.1计算初始啮合间隙 (19)4.2.2判定摆线轮与针轮同时啮合的齿数 (20)4.2.3修正齿形摆线轮与针齿啮合时的受力分析 (21)4.2.4输出机构的柱销作用于摆线轮上的力 (21)4.2.5转臂轴承的作用力 (22)4.3 强度校核 (22)4.3.1齿面接触强度计算 (22)4.3.2输出机构圆柱销的强度计算 (23)4.3.3转臂轴承寿命计算 (23)4.4 计算结果分析 (24)第五章三维造型设计 (26)5.1 引言 (26)5.2 Pro/E简介 (26)5.3 Pro/ENGINEER 参数式设计的特征 (26)5.4 三维实体造型 (27)结论 (32)谢辞................................................. 错误!未定义书签。
毕业设计:摆线针轮减速机输出轴加工工艺及夹具设计
毕业设计(论文)题目:摆线针轮减速机输出轴加工工艺及夹具设计姓名:指导教师:专业:摘要摆线针轮减速器是由于齿差渐开线行星减速器发展而来的。
研究好它的轴类零件的夹具设计,就能更好的改进和开发出更先进的减速装置,也能很好的提升生产的效率和创造出更大的效益。
然而机床专用夹具的设计是工艺准备的重要工作内容之一。
机床专用夹具设计的质量,直接影响工件的精度、质量、生产率和加工成本,有时甚至决定了所设计的夹具是否有使用价值。
在生产实践中,由于某些因素考虑不同到,设计和制造出来的夹具不能使用的例子时有出现。
因此,只有充分应用夹具设计的基本原理和知识,正确掌握夹具设计的基本方法.才能设计出先进、合理和实用的机床专用夹具。
设计专用夹具时必须使加工质量、生产率、劳动条件和经济性等几方面达到辨证的统一。
其中保证加工质量是最基本的要求。
为了提高生产率采用先进的结构和机械传动装置,往往会增加夹具的制造成本,但当工件的批量增加到一定的规模时,因单件工时下降所获得的经济效益将得到补偿,从而降低制造成本。
因此只有所设计的夹具其复杂程度和工作效率必须与生产规模相适应,才能获得良好的经济效益。
关键词:摆线针轮减速机,机床,夹具,工艺ABSTRACTCycloidal pinwheel reducer is involute tooth differenced planetary reducer due. Study good its axial parts fixture design, can improve and develop more advanced deceleration device, also can be a very good advance production efficiency and create greater efficiency. However ,machine is the design of special jig working content of the important process of preparation. The quality of the special fixture design machine tools, directly affects the accuracy of workpiece, quality, productivity and processing cost, sometimes even determines whether the design of fixture use value. In the production practice, due to some factors to consider different, design and manufacture of fixture can't use out has appeared. Examples Therefore, only making full use of the basic principle and fixture design knowledge, correctly grasp the basic methods of fixture design. To design advanced and reasonable and practical machine special jig.Special fixture design must make machining quality, productivity, labor conditions and economic aspects of the dialectical unity to. Which is the most basic guarantee the machining quality requirements. In order to increase productivity adopts advanced structure and mechanical transmission device, often can increase the manufacturing cost, but fixture the batch when the workpiece is increased to certain scale, obtained by the piece man-hour drop economic benefit will be compensated, thereby reducing production cost. As a result, only the design of fixture its complexity and work efficiency must be adapted to the production scale, can obtain the good economic benefit.Key words :Cycloidal reducer, machine tool, fixtures, process目录摘要 (I)ABSTRACT (II)目录 (III)第一章绪论............................. 错误!未定义书签。
(完整版)减速机设计毕业设计
摘要传统的摆线针轮减速机精确度不够,不能应用于精密传动的场合,本课题旨在改进传统的行星针轮摆线减速机,提高精度和效率。
通过改进齿轮啮合副以及使用精度更高的等速输出机构来实现。
本设计通过对基本机构的分析来确定本设计机构的可能性,然后通过接触强度的计算进行摆线轮尺寸的确定,摆线齿轮的尺寸确定后就可以确定针轮的尺寸,通过摆线齿轮的尺寸来初步确定十字盘的尺寸,通过对十字盘的校核来验算尺寸是否合格,不合格继续修改参数,进行下一轮计算,直到算出合格的参数为止。
然后通过选取联轴器来确定轴的最小尺寸,在根据轴上零件尺寸来确定各轴段尺寸,最后确定整个减速器的尺寸。
通过查阅公式进行了一系列计算后,各零部件的强度都符合要求,确定了本设计的改进方案在理论上的合理性和可行性。
关键词:行星传动摆线齿轮十字钢球等速输出机构变齿厚AbstractTraditional cycloidal reducer precision is not enough, can not be applied to precision transmission occasions, this subject aims to improve the traditional needle wheel planetary cycloid reducer, improve accuracy and efficiency. By improving the gear meshing pair and use higher precision constant output mechanism.This design through the analysis of basic mechanism to determine the possibility of the design organization, and then through the calculation of contact strength for determination of cycloid gear size, the size of the cycloidal gear is determined can determine the size of needle wheel, through the size of the cycloidal gear to preliminarily determine the dimensions of the cross plate, plate through the cross checking to check the size whether qualified, unqualified continue to modify parameters,calculation of the next round until work out qualified parameters. Then select coupling to determine the minimum size of shaft, in according to the size of shaft parts to determine the various shaft section size, finally determine the size of the whole reducer.By looking at in a series of calculation formula, the strength of the parts meet the requirements, determine the improvement scheme of the design in theory the rationality and feasibility.Keywords:Planetary-transmission; Cycloid ; Cross steel ball uniform output mechanism; Variable tooth thickness目录第1章绪论 (1)1.1 目的和意义 (1)1.2 摆线针轮与钢球等速输出机构的国内外研究概况 (1)1.2.1 摆线针轮减速器的国内外研究概况 (2)1.2.2 无隙钢球等速输出机构的研究现状 (3)1.3 主要研究内容 (4)第2章传动总体设计 (5)2.1 传动机构设计 (5)2.1.1 机构的改进方案 (5)2.2.1 总体的结构设计 (8)2.2 计算负载以及电机的选择 (9)第3章摆线齿轮的设计及校核 (10)3.1 摆线齿轮的受力分析 (10)3.2 摆线轮及针轮的校核计算 (13)3.2.1 齿面接触强度计算 (13)3.2.2 针齿抗弯曲强度计算及刚度计算 (14)3.3 摆线针轮的计算和校核过程 (14)3.4转臂轴承的选择 (19)第4章十字钢球等速输出机构的计算及校核 (20)4.1 结构组成及工作原理 (20)4.2 无回差特性分析 (21)4.3 力学性能分析 (23)4.3.1 钢球滚道槽啮合副的受力分析 (23)4.3.2 强度分析 (26)4.4 十字钢球等速输出机构的计算和校核 (27)第5章轴的设计计算及校核和键的校核 (30)5.1 轴的设计及校核过程 (30)5.1.1 输入轴的设计与校核 (30)5.1.2 输出轴的设计与校核 (35)5.2 键的校核 (41)结论 (41)致谢 (42)参考文献 (42)第1章绪论减速器是各种机械设备中最常见的部件,它的作用是将电动机转速减少或增加到机械设备所需要的转速,摆线针轮行星减速器由于具有减速比大、体积小、重量轻、效率高等优点,在许多情况下可代替二级、三级的普通齿轮减速器和涡轮减速器,所以使用越来越普及,为世界各国所重视。
行星齿轮减速器设计行星齿轮减速器设计毕业论文
行星齿轮减速器设计行星齿轮减速器设计毕业论文行星轮齿传动计设业毕文1论引言行星轮齿传动在国我已有许了年多的展史发很早就有了应,。
然用,自而20 纪世06 代年以来我,才开始国行对星齿传轮进行动了深较、系统入研究的试制工和。
无论作在是计设论理面方,是还试在制应用和实践面方,取得了较大的成就并均获了许多的得研究果。
成2近0多来年尤,其是我改国开革放以,随来着国科学我技水术平的步进发展和我国已从世界上,多许工业达发国家进了大量先引的进械机备设技和术,过经我机械国科人员技不积断极吸的收消和,化与时俱进,开拓新创地努力 1 进奋使,国的我星行动传技术有迅了的速展发。
2 设背景试为某计水泥械机装设计所置配需用行的星齿轮减器,已速知该行齿轮星速器的要求减输功入为率740pW K,入输转速n1 100r0mp传动为比p 3i5.5 许传动允比1差偏iP 0.1 天要每求作工1 6时小,求寿要为命2 年;要求且该行星齿减轮速器传结构动紧,外廓尺凑寸小较传动和率高效。
3设计计算 .31 选取行星轮齿速器减的动传型类和动简传图据上根述设计求可要知该,行星齿轮减速器传递率高功、动比传较大、作工境环恶等特劣。
故采点用级行星双齿传动轮。
2-AX型结简构单制造,方便适,用于任工况下的何大功率的小传动选用。
由个两2X- 型A行星轮传动串联齿成而双级的行齿星减速器较为轮合,理名义传动可分比为ip1 7. 1i p 25 进行传动传动。
简如图图1所示:1图.32配计齿算据根X-2 A行星型齿轮传比动i p 的值按和配其齿计算公,可得第一式级传的动内齿轮b1 行星齿轮c 1的数。
齿现考到该行虑星轮传齿的外廓动尺寸故选,第一取级中心齿轮a1 数为71和行星齿轮为数np3 。
据内齿根轮bz i p1 z11 a z1 b1 .7 117 103.7110 3 内齿对轮齿数进行整圆后,时实此际的P 值给与定P 的稍值变化,但有必是须控制其在传动比差范围内。
毕业设计NGWN(III)型行星轮减速器设计
1 前言NGWN(III)型行星轮减速器设计1 前言随着现代化工业的发展,机械化和自动化水平不断地提高,各工业部门需要大量的减速器,并要求减速器的体积小、重量轻、传动比大、效率高、承载能力大、运转可靠和寿命长等。
而行星齿轮传动具有减速比大、传动效率高、结构小巧、承载能力强等优点,在许多情况下可代替二级、三级的普通齿轮减速器和涡轮减速器,因此行星轮减速器被广泛应用于各个方面。
行星传动不仅适用于高转速、大功率,而且在低速大转矩的传动装置上也已获得广泛的应用,所以目前行星传动技术已成为世界各国机械传动重点之一。
目前国外的减速器,以德国、丹麦和日本处于领先地位,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。
行星轮减速装置经过一个多世纪的发展设计理论及制造技术有了很大的进步,而且与新技术革命的发展紧密结合。
当今世界行星轮减速装置总的发展趋势是向着大功率、大传动比、小体积、高机械效率、高的承载能力以及利用寿命长的目标发展,而且其重量更轻,噪声更低,效率更高,可靠性也更高。
目前世界各国由工业化信息化时代正在进入知识化时代,行星轮在设计上的研究也趋于完善,制造技术也不断改进。
行星齿轮传动类型很多,行星齿轮传动根据基本够件的组成情况可分为:2K—H、3K、及K—H—V三种。
若按各对齿轮的啮合方式,又可分为:NGW型、NN型、WW型、WGW 型、NGWN型和N型等。
我所研究的NGWN(III)行星齿轮属于3Z型行星齿轮传动的一种。
本文主要对NGWN(III)齿轮减速器设计方法进行了探讨,主要内容包括齿轮传动比的分配计算,主要零部件参数设计,标准零部件的选用,以及减速器中零件三维模型的设计。
NGWN(III)行星轮减速器的设计2 选题背景2.1 题目来源生产实际2.2 研究的目的与意义由于行星轮齿轮减速器具有质量小、体积小、传动比大以及效率高等优点,因此行星轮减速器被广泛应用于工程机械、矿山机械、冶金机械、起重运输机械、飞机、轮船等各个方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要摘要本次设计的是摆线针轮行星减速器摆线针轮行星传动具有传动比范围大体积小重量轻效率高运转平稳噪声低工作可靠寿命长的特点因此摆线针轮行星齿轮传动现已广泛地应用于工程机械矿山机械冶金机械起重运输机械轻工机械石油化工机械机床机器人汽车坦克火炮飞机轮船仪器和仪表等各个方面文中从对齿轮减速器的发展的历史研究开始再对传动比进行计算而后分别进行齿数计算齿形分析效率计算强度验算结构设计绘制减速器装配图及零件图最后对行星齿轮的结构设计进行了较详细的阐述通过对摆线针轮行星减速器的研究结合目前的发展情况和所要面临解决的问题设计出具有上述一系列优点的减速机构在设计中摆线针轮行星传动的薄弱环节是转臂轴承因转臂轴承在受力大转速也较高的情况下工作其内外圈的相对转速等于输入轴与输出轴二者转速绝对值之和所以在新系列中为保证转臂轴承的寿命往往采用加强型的滚子轴承关键词摆线针轮行星减速器齿轮行星齿轮减速器齿轮啮合滚子轴承AbstractAbstractThis design is pin-cycloidal gear planetary Pin-cycloidal gear planetary gear transmission range is big small volume light weight high efficiency stable operationlow noiselong life and reliable Therefore the planetary gear transmission has been widely used in engineering machinery mining machinery metallurgy machinery lifting transportation machinery light industrial machinery petroleum chemical machinery machine tools robots automobile tanks artillery and aircraft ships instrument and meter etc Based on the development of gear reducer "the study of history to start again then calculated the transmission separately gear tooth profile analysis and calculation the calculation efficiency strength calculation the structure design drawing assembly and detail drawings Finally the structure design of planetary gears are expounded in detail Through the cycloid planetary reducer combining the current development situation and to solve the problem the design has the advantages of a slowdown In the design of cycloid planetary gear the weak link is turning arm bearing because in turn arm bearing force high speed and under the condition of inner work the relative speed equals input shaft and the output shaft rotational sum between absolute so that a new series in turn for the life often arm bearing reinforced by the roller bearingsKey words Pin-cycloidal gear planetary reducer gear planetary gear reducer gears meshing roller bearings目录摘要IAbstract II第一章绪论 111行星齿轮传动的发展概况 112 行星齿轮传动的发展趋势 313 行星齿轮传动的优缺点 414 本设计课题简介 6第二章摆线针轮减速器传动理论与设计方法7 21 摆线针轮减速器的传动原理与结构特点7 211 摆线针轮行星传动的传动原理7212 摆线针轮减速器的结构特点7313 摆线针轮传动的啮合原理8第三章针齿与摆线轮齿啮合时的作用力1531确定初始啮合侧隙1532判定摆线轮与针轮同时啮合齿数的基本原理 16 33针齿与摆线轮齿啮合的作用力1634输出机构的柱销套作用于摆线轮上的力17 341 判断同时传递转矩的柱销数目 18342输出机构的柱销作用于摆线轮上的力18 343 转臂轴承的作用力1835 摆线针轮行星减速器主要强度件的计算19351齿面接触强度计算 19352 针齿抗弯曲强度计算及刚度计算19353 转臂轴承选择20354 输出机构柱销强度计算20第四章摆线针轮减速器的设计计算2241摆线轮的设计22411确定传动的结果形式22412确定摆线轮针轮的齿数22413确定针轮半径22414确定短幅系数和偏心距2342转臂轴承的选择23421转臂轴承负载计算 23423转臂轴承选择24424转臂轴承寿命计算 2443确定针轮尺寸2444摆线轮结果尺寸的计算2645确定输出机构中柱销柱销套和柱销空的直径 27 46摆线轮针齿柱销的数据表27第五章轴的计算 3051输出轴的计算30511输出轴的结构装配图30512初步确定轴的最小直径30513输出轴的结构设计 30514求轴上载荷31515按弯扭合成应力校核31516精确校核轴的疲劳强度3252输入轴的计算33521输入轴结构转配图 33522初步确定轴的最小直径34523轴的结构设计34524力的计算35525按弯扭合成强度校核35526精确校核轴的疲劳强度35第六章箱体的结构设计3861箱体的结构设计准则38611机体应具有足够的刚度38612应考虑便于机体内零件的润滑密封及散热38 613机体要有良好的工艺性3962减速器箱体密封3963试验要求观包装运输和储藏的要求39第七章减速器的润滑4171润滑的意义 4172齿轮润滑剂的选择42参考文献44致谢45第一章绪论11行星齿轮传动的发展概况我国早在南北朝时代公元429~500年祖冲之就发明了有行星齿轮的差动式指南车比欧美早了1300多年1880年德国第一个行星齿轮传动装置的专利出现了1920年首次成批制造出行星齿轮传动装置并首先用于汽车的差速器1938年起集中发展汽车用的行星齿轮传动装置二次世界大战后机械行业的蓬勃发展促进了行星齿轮传动的发展高速大功率行星齿轮传动广泛的实际应用于1951年首先在德国获得成功1958年后英意日美苏瑞士等国也获得成功低速重载行星减速器已由系列产品发展到生产特殊用途产品如法国Citroen生产用于水泥磨榨糖机矿山设备的行星减速器重量达125t输出转矩3900KNm公元1765年欧拉提出用渐开线作为齿轮齿廓曲线以来定轴轮系的齿轮传动获得了最广泛的应用但是随着生产发展的需要早在1879年BOCK就论述了传动比i 的行星齿轮装置继后Shaw发表了传动比i 2的机构以及TOBPNABHKO用串联K-H-V型行星传动获得了传动比i 的传动机构当时这些大传动比的行星机构主要是用以实现某一运动19世纪以来随着机械工业的发展如汽车航空工业等特别是第二次世界大战后高速大功率船舰以及透平发动机组和透平压缩机等的发展对渐开线齿轮传动在速度功率效率外廓尺寸和重量等诸方面提出了愈来愈高的要求这对于一对外啮合的定轴齿轮传动来说由于在承载能力速比外廓尺寸和重量等诸方面的限制是难以满足生产发展的需要的从而提出了采用内啮合的分流传动结构由于分流效应和合理地利用了内啮合以及行星齿轮传动在运动学上的优点从而使渐开线行星齿轮传动得到了迅速的发展高速大功率行星齿轮传动的实际应用于1951年首先在西德获得成功1958年以后美英日苏捷意荷瑞士等国亦获得成功并已成批生产使用其中在国际上享有盛名的有西德Renk行星齿轮箱瑞士Maag行星齿轮箱美国Fritlsch行星齿轮箱英国C·O·G行星齿轮箱捷克SKODA行星齿轮箱和日本IMT行星齿轮箱等随着生产的不断发展制造技术的不断进步以及行星齿轮传动在设计上日趋完善从而使行星齿轮传动至今已达到了较高的水平目前渐开线行星齿轮传动圆周速度达160~200米秒传递功率达100000马力效率达098以上齿轮噪音达85分贝以下并且外廓尺寸小重量轻它比同等工作条件下的定轴齿轮传动外廓尺寸和重量减小12~16表1列出了Delaval公司生产的传动比i 715N 6000马力的行星齿轮减速箱与该工作条件下的一般定轴齿轮减速箱的比较情况行星齿轮传动与一般齿轮传动在相同条件下圆周速度也较小故传动载荷比一般齿轮也小些并且行星齿轮传动还具有工作可靠同轴传动等一系列优点表1 行星齿轮减速箱和一般定轴齿轮减速箱比较项目行星齿轮减速箱一般定轴齿轮减速箱总重量 kg 3471 6943 高度 m 131 180 长度 m 129 142 宽度 m 135 236 体积229 609 损失功率 kw 018 041 齿宽 m 81 95 圆周速度 ms 427 994目前行星齿轮传动不仅适用于高速大功率而且在低速大扭矩设备上也已推广采用它几乎适应于一切功率速度范围和一切工作条件成为世界各国齿轮传动发展之重点渐开线行星齿轮传动已被广泛应用于船舰主减速器汽车坦克和拖拉机的差速器活塞式和涡轮螺旋桨式航空发动机与直升飞机中带动螺旋桨的行星传动以及波音菲托CH1T前旋翼驱动行星齿轮箱和贝尔VH1D主旋翼驱动行星齿轮减速器燃气轮机高速汽轮机和透平鼓风机及压缩机的行星齿轮增速箱和减速箱以及工程机械等产品上我国从1968年起先后在有关单位试制成功列车电站燃气轮机N 3000千瓦工业用高速汽轮机N 500千瓦和万立米制氧透平压缩机N 6300千瓦的行星齿轮箱为了推广行星传动有一机部组成了NGW系列工作组由西安重机研究所银川通用机械厂荆州减速机厂和各中性机械厂等二十几个单位于1974年制定了NGW2K-H 型渐开线行星齿轮减速器的部标准目前渐开线行星齿轮传动在国内已逐渐受到重视并推广其应用我国是从20世纪60年代起开始研制应用行星齿轮减速器20世纪70年代制订了NGW型渐开线行星齿轮减速器标准系列JB1799-1976已形制成功高速大功率的多种行星齿轮减速器如列车电站燃气轮机3000kW高速汽轮机500kW和万立方米制氧透平压缩机6300kW的行星齿轮箱低速大转矩的行星减速器也已批量生产如矿井提升机的XL-30型行星减速器800kW世界各先进工业国经由工业化信息化时代正在进入知识化时代行星齿轮传动在设计上日趋完善制造技术不断进步使行星齿轮传动已达到了较高水平我国与世界先进水平虽存在明显差距但随着改革开放带来设备引进技术引进在消化吸收国外先进技术方面取得长足的进步12 行星齿轮传动的发展趋势1向高速大功率及低速大转矩的方向发展行星齿轮箱传递的功率将与日俱增但是机组功率的继续增大目前受优越工艺因素的限制主要是没有与齿轮尺寸进一步增大相适应的高精度切齿机另一方面则是梅雨齿轮直径大于6米的热加工锻造设备因此需进一步研制大尺寸的高淬硬齿轮切削用的高刚性高精度滚齿和插齿机以及高精度和超硬切齿刀具和检验仪器在设计方面则应着重于擦伤强度的研究制定出齿轮擦伤强度的计算公式并对齿轮本体和箱体的变形应力计算进行研究随着高速的发展目前对行星齿轮传动的动力学研究还很不够特别是与公害有关的振动和噪音的研究随着电算技术的发展还应用有限元法制定出应用电子计算机进行齿轮设计和加工精度的计算方法用电算解决参数选择最优化此外还必须对内齿圈的固定方法齿面接触应力齿根弯曲应力齿轮加工工艺均载机理及其装置齿轮润滑等进行研究还应大量开展行星齿轮传动的试验研究工作例如实际负荷运转试验齿轮应力状态效率温升振动噪音润滑等各种性能试验寿命试验破坏试验等例如年产300Kt合成氨透平压缩机的行星齿轮增速器其齿轮圆周速度已达150ms日本生产了巨型船舰推进系统用的行星齿轮箱功率为22065kw 大型水泥球磨机所用80125型行星齿轮箱输出转矩高达4150kNm在这类产品的设计与制造中需要继续解决均载平衡密封润滑零件材料及热处理及高效率长寿命可靠性等一系列设计制造技术问题2向无级变速行星齿轮传动发展多年来一直需要一种传递大功率高效率变速比的传动装置无级变速即输入速度是固定的输出速度是可调的实现无级变速对行星齿轮传动来说就是让行星齿轮传动中三个基本构件都转动并传递功率这只要在原先行星齿轮传动装置中对原来固定的基本构件附加一个转动就能使输出转速有所增减而成为行星齿轮无级变速器现已制成能传递2000Psi以上的无级变速齿轮箱实现无级变速就是让行星齿轮传动中三个基本构件都转动并传递功率这只要对原行星结构中固定的构件加一个转动如采用液压泵及液压马达系统来实现就成为无级变速器3向复合式行星齿轮传动发展近几年来国外蜗杆传动螺旋齿轮传动圆锥齿轮传动与行星齿轮组合使用构成复合式行星齿轮箱其高速级用前述各种定轴类型传动低速级用行星齿轮传动这样可适应相交轴和交错轴间的传动可实现大传动比和大转矩输出等不同用途充分利用各类型传动的特点克服各自的缺点以适应市场上多样化需求如制碱工业澄清桶用蜗杆蜗轮行星齿轮减速器总传动比i 0125rmin输出转矩27200Nm4向少齿差行星齿轮传动方向发展这类传动主要用于大传动比小功率传动主要是它外廓尺寸小重量轻传动比大一级可达100115效率较高达085左右该机薄弱环节主要是转臂轴承于高速重载啮合角很大一齿差时达56o左右故传动中径向载荷为不进行变位切削时的28倍因此这种传动现阶段只适用于中小功率国内应用的少齿差渐开线行星齿轮传动功率均为超过50千瓦转臂轴承性能和承载能力有所提高则传递功率增大西德Fridocon Michel公司生产了齿数差为2~5的ACBAR渐开线少齿差行星齿轮减速器并制定了标准系列而少齿差传动的效率和强度计算等还有待于进一步研究5制造技术的发展方向采用新型优质钢材经热处理获得高硬齿面内齿轮离子渗碳外齿轮渗碳淬火精密加工以获得高齿轮精度及低粗糙度内齿轮精插齿达5-6级精度外齿轮经磨齿达5级精度粗糙度Ra02-04μm从而提高承载能力保证可靠性和使用寿命13 行星齿轮传动的优缺点行星齿轮传动与普通齿轮传动相比较它具有许多独特的优点它的显著特点是在传递动力时它可以进行功率分流同时其输入轴和输出轴具有同轴性即输入轴和输出轴均设在同一轴线上所以行星齿轮传动现已被人们用来代替普通齿轮传动而作为各种机械传动系统中的减速器增速器和变速装置尤其是对于那些要求体积小质量小结构紧凑和传动效率高的航空发动机起重运输石油化工和兵器等的齿轮传动装置以及需要差速器的汽车和坦克等车辆的齿轮传动装置行星齿轮传动已得到了越来越广泛的应用行星齿轮传动的特点如下1 体积小质量小结构紧凑承载能力大由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副因此可使其结构非常紧凑再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷从而使得每个齿轮所承受的负荷较小并允许这些齿轮采用较小的模数此外在结构上充分利用了内啮合承载能力大和内齿圈本身的可容体积从而有利于缩小其外廓尺寸使其体积小质量小结构非常紧凑且承载能力大一般行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的12~15即在承受相同的载荷条件下2 传动效率高由于行星齿轮传动结构的对称性即它具有数个匀称分布的行星轮使得作用于中心轮和转臂轴承中的反作用力能相互平衡从而有利于达到提高传动效率的作用在传动类型选择恰当结构布置合理的情况下其效率值可达097~0993 传动比较大可实现运动的合成与分解只要适当选择行星齿轮传动的类型及配齿方案便可以用少数几个齿轮而获得很大的传动比在仅作为传递运动的行星齿轮传动中其传动比可达几千应该指出行星齿轮传动在其传动比很大时仍然可保持结构紧凑质量小体积小等许多优点而且它还可以实现运动的合成与分解以及实现各种变速的复杂的运动4 运动平稳抗冲击和振动的能力较强由于采用了数个结构相同的行星轮均匀地分布于中心轮的周围从而可使行星轮与转臂的惯性力相互平衡同时也使参与啮合的齿数增多故行星齿轮传动的运动平稳抵抗冲击和振动的能力较强工作较可靠总之行星齿轮传动具有质量小体积小传动比大及效率高类型选用得当等优点因此行星齿轮传动现已广泛地应用于工程机械矿山机械冶金机械起重运输机械轻工机械石油化工机械机床机器人汽车坦克火炮飞机轮船仪器和仪表等各个方面行星传动不仅适用于高转速大功率而且在低速大转矩的传动装置上也已获得了应用它几乎可适用于一切功率和转速范围故目前行星传动技术已成为世界各国机械传动发展的重点之一但是行星齿轮传动的缺点是材料优质结构复杂制造和安装较困难些但随着人们对行星传动技术进一步深入地了解和掌握以及对国外行星传动技术的引进和消化吸收从而使其传动结构和均载方式都不断完善同时生产生产工艺水平也不断提高因此对于它的研制安装问题目前已不再视为一件什么困难的事情实践表明在具有中等技术水平的工厂里也是完全可以制造出较好的行星齿轮传动减速器尤为重要的是设计人员对于自己设计的某些齿轮减速器进行优化优化结果不仅为齿轮传动提供了一个最优的设计方案而且对其设计参数的优化提供了依据14 本设计课题简介摆线针轮行星传动和渐开线少齿差行星齿轮传动同属K-H-V行星齿轮传动其工作原理和结构基本相同所不同者摆线针轮行星传动的行星传动的行星齿轮的齿廓曲线不是渐开线而是采用变幅外摆线的内侧等距曲线其中用短幅外摆线的等距曲线较普遍中心轮齿廓与上述曲线共轭是圆摆线针轮行星减速器由行星架H行星轮c中心轮b和输出结构W四部分组成摆线针轮行星传动具有传动比范围大体积小重量轻效率高运转平稳噪声低工作可靠寿命长的特点由于有上述优点这种减速器在很多情况下已经代替两级三级普通圆柱齿轮减速器及圆柱蜗杆减速器在冶金矿山石油化工船舶轻工食品纺织以及军工等很多部门得到日益广泛的应用但是这种传动制造精度要求高需要专门的加工设备摆线针轮行星传动的薄弱环节是转臂轴承因转臂轴承在受力大转速也较高的情况下工作其内外圈的相对转速等于输入轴与输出轴二者转速绝对值之和所以在新系列中为保证转臂轴承的寿命往往采用加强型的滚子轴承本次设计的是对一种摆线针轮行星减速器进行分析研究在此基础上试以现代反求设计方法为指导进行设计其传动功率为P 4KW速比为11输入轴转速1500rmin对于摆线针轮行星减速器而言要求行星减速器满足三项要求传动比大结构紧凑适宜短期间断工作在本次设计中要进行齿数计算齿形分析效率计算强度验算结构设计绘制减速器装配图及零件图在结构设计时要注意有关装置的特点还要注意与多种减速方法进行比较注意理论分析第二章摆线针轮减速器传动理论与设计方法21 摆线针轮减速器的传动原理与结构特点211 摆线针轮行星传动的传动原理图所示为摆线针轮行星传动示意图其中为针轮为摆线行星轮H为系杆V为输出轴运动由系杆H输入通过W机构由V轴输出同渐开线一齿差行星传动一样摆线针轮传动也是一种K-H-V型一齿差行星传动两者的区别在于摆线针轮传动中行星轮的齿廓曲线不是渐开线而是变态摆线中心内齿采用了针齿以称针轮摆线针轮传动因此而得名同渐开线少齿差行星传动一样其传动比为图2-1 摆线针轮减速器原理图由于=1故=--表示输出与输入转向相反即利用摆线针轮行星传动可获得大传动比212 摆线针轮减速器的结构特点它主要由四部分组成1 行星架H又称转臂由输入轴10和偏心轮9组成偏心轮在两个偏心方向互成2 行星轮C即摆线轮6其齿廓通常为短幅外摆线的内侧等距曲线为使输入轴达到静平衡和提高承载能力通采用两个相同的奇数齿摆线轮装在双偏心套上两位置错开摆线轮和偏心套之间装有滚动轴承称为转臂轴承通常采用无外座圈的滚子轴承而以摆线轮的内表面直接作为滚道近几年来优化设计的结构常将偏心套与轴承做成一个整体称为整体式双偏心轴承3 中心轮b又称针轮由针齿壳3上沿针齿中心圆圆周上均布一组针齿销5 通常针齿销上还装有针套7 组成4 输出机构W 与渐开线少齿差行星齿轮传动一样通常采用销轴式输出机构图2-2 摆线针轮减速器基本结构图1输出轴 2机座 3针齿壳 4针齿套 5针齿销 6摆线轮7销轴套 8销轴 9偏心轮 10主动轴图2-2为摆线针轮传动的典型结构313 摆线针轮传动的啮合原理为了准确描述摆线形成及其分类我们引进圆的内域和圆的外域这一概念所谓圆的内域是指圆弧线包容的内部范围而圆的外域是包容区域以外的范围按照上述对内域外域的划分则外摆线的定义如下外摆线滚圆在基圆外域与基圆相切并沿基圆作纯滚动滚圆上定点的轨迹是外摆线外切外摆线滚圆在基圆外域与基圆外切形成的外摆线此时基圆也在滚圆的外域内切外摆线滚圆在基圆外域与基圆内切形成的外摆线此时基圆在滚圆的内域短幅外摆线外切外摆线形成过程中滚圆内域上与滚圆相对固定的某点的轨迹或内切外摆线形成过程中滚圆外域上与滚圆相对固定的某点的轨迹长幅外摆线与短幅外摆线相反对外切外摆线而言相对固定的某点在滚圆的外域对内切外摆线而言相对固定的某点在滚圆的内域短幅外摆线与长幅外摆线通称为变幅外摆线变幅外摆线变幅的程度用变幅系数来描述分别称之为短幅系数或长幅系数外切外摆线的变幅系数定义为摆杆长度与滚圆半径的比值所谓摆杆长度是指滚圆内域或滚圆外域上某相对固定的定点至滚圆圆心的距离211式中变幅系数a外切外摆线摆杆长度外切外摆线滚圆半径对于内切外摆线而言变幅系数则相反它表示为滚圆半径与摆杆长度的比值 212式中K1变幅系数r2′内切外摆线滚圆半径A内切外摆线摆杆长度根据变幅系数K1值的不同范围将外摆线划分为3类短幅外摆线0 K1 1标准外摆线K1 1长幅外摆线K1 1变幅外切外摆线与变幅内切外摆线在一定的条件下完全等同这个等同的条件是内切外摆线滚圆与基圆的中心距等于外切外摆线的摆杆长度a相应地外切外摆线滚圆与基圆的中心距等于内切外摆线的摆杆长度A根据这一等同条件就可以由外切外摆线的有关参数推算出等同的内切外摆线的对应参数它们的参数关系参看图3-3令短幅外切外摆线基圆半径代号为r1滚圆半径为r2短幅系数为K1则外切外摆线的摆杆长度和中心距可分别表示如下长幅外摆线的表示形式完全相同。