基于机理的合成孔径雷达系统成像误差理论分析(精)
弹载合成孔径雷达成像处理及定位误差分析
,£ ≈ ( )
( cs n C S CS s E 。 E i 0+ s O  ̄ O 0一 i ) n
当雷 达 波 束 所 照 射 区 域 的 同 一 距 离 环 带 上 出 现 不 同方 位 角 的 两 个 目标 B , C 时 ,两 目标 间存 在 多 普 勒 频 差 ,通 过 合 理 地 设 置 多 普 勒 滤 波 器 ,就 可 以 区 分 开 真 实 天 线 波 束 照 射 宽 度 内距 离 相 同 而方 位 不 同 的 回波 ,从 而 有 效 改 善方 位 分 辨 力 . 22雷 达 信 号 数 学 模 型 .
制 导 中 的应 用 实 验 .
2弹 载 S R原 理 A
21空 间几 何 关 系 .
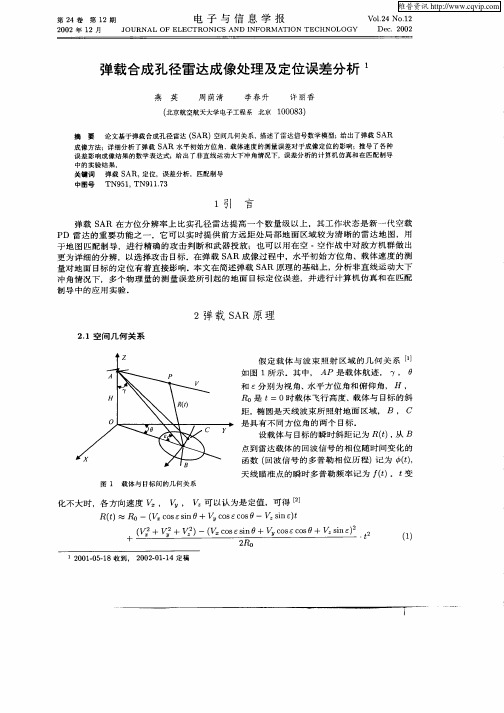
假 定 载 体 与 波 束 照 射 区 域 的 几 何 关 系 L l J
如 图 1 示 .其 中 , 所
P 是 载 体 航 迹 , 7,
和 E分 别 为 视 角 、 平 方 位 角 和 俯 仰 角 , H , 水
设载体 在很 短时 间内作 匀速直线 飞行 ,整个雷达 波束所 照射区域 的回波信号 s£ 为 [ ( ) 。 】
s ) ,。 (丁) , ㈤ = I s R) c 一(一 ) [ 2 t
其中 ,R 0 =I( ,)epj ( ,) 为分辨单元的地面散射系数, 2 t C为反射回波时间 ( ,) ,R I { ̄R ) x R( / ) 延迟 , R . R . O为分 辨单元面 积, R 为斜 距。为讨论方便 ,令天 线方 向性 函数 A() 1. d d O=
函数 ( 回波信号 的多普 勒相位 历程) 为 ( , 记 £ ) 天线 瞄准 点的瞬时多普 勒频率记为 f t 。t ( ) 变
图 1 载体 与 目标间的几何关 系
机载合成孔径雷达成像算法及运动补偿的研究

机载合成孔径雷达成像算法及运动补偿的研究下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!Title: 机载合成孔径雷达成像算法及运动补偿的研究一、引言机载合成孔径雷达(SAR)作为一种重要的遥感成像技术,在地质勘测、环境监测和军事侦察等领域具有广泛的应用。
直升机载旋转式合成孔径雷达成像振动误差补偿算法

仿真结果对所
算法的有效性与
了验证。
1直升机载ROSAR振动误差及回波 信号模型
ROSAR系统平台在空中作业时,直升机旋翼在
旋转 与
周期
生 转,
转引 机 动
到 机,
天线
生振动频率为N/T\
振动,其
#为合成孔径 ,N 在 T
振动
次数。根据 测
据[⑶,我们选择典型的
BO105型直升机作为实验 ,结合其振动 「对
Abstract: As a new irndginy framework, the rotatiny synthetic aperture radae ( ROSAR) obtains synthetic aperture by antenna rotation instead of plaUoam motion. Howevea, tie high-frequency vibration on helicoptera wilO cause se vere phase ecor in siynai echo and performanco deeradation of the finai imaye. The vilration phase ecor can' i been estimated vio conventionai irmiainy alyorithme, such as Ranye-Doppler AlyoritUm ( RDA) , due 1u ranye and aziniuth caupliny, se the existiny autofocus methods cannot be used te improvv the imaainy performance. In this latea, a new ROSAR irndainy procedure was proposed t compensate the phase error caused by high-frequency vibra tion of helicopters. Firstly, Uc viOration model of ROSAR siynal echo was established; secondly, double Doppler Keystone transform ( DDKT) was adopted to cott—C the ranye cell miyration( RCM) induced by slant ranye histoiy and voboaioon eoo; ihoodey, iheanaeyiooaeeohoeipoeeoon woih oanye-ondependenivoboaioon phaeeeoohaebeen derived with more details proviOed. Fintly, the focused imidye can be obtained vio classical autofocus alyorithms. The experimental results with simulation data verified the effectivvnas of the proposed method. Keyword: rotatiny synthaic aperture radas ( ROSAR) ; vibration phase otot ; doubye Dopples Keystone trans form ;phase autofocus alyorithm
合成孔径雷达原理及其干扰分析

合成孔径雷达原理及其干扰分析摘要:合成孔径雷达是一种全天候、高分辨率的图像设备,广泛用于侦察,为相关决策提供及时可靠的信息支持。
为了实现对高灵敏度目标和重要场所的有效保护,抑制和干扰对方合成孔径雷达设备成像侦察的方法,已经成为电子对抗领域的热门研究问题之一。
同时合成孔径雷达是最广泛使用的雷达成像技术,飞机载和星载已经被广泛使用,其分辨率超过了普通雷达范围。
因此,有必要分析了合成孔径雷达成像的原理,并研究了不同的干扰波形,讨论了合成孔径雷达的技术特点和开发动向,促进相关技术的发展。
本文浅谈合成孔径雷达原理及其干扰分析。
关键词:合成孔径雷达;干扰;趋势引言:合成孔径雷达自其诞生以来就与军队密切相关。
由于该技术的不断开发,合成孔径雷达被广泛用于军事目的,受到各方的广泛关注。
合成孔径雷达可用于飞机组、坦克组、机场、各种车辆、桥梁、铁路、高速公路、军事侦察、地面测绘等监测。
这些目标在合成孔径雷达中图像中的特征非常明显,并且与周围的其他部分有很大的对比度,所以使用大部分可以使用合成孔径雷达来确定和识别,干扰的目的是使用假目标信息来检测和跟踪雷达目标。
而合成孔径雷达在战争中发挥着重要作用,成为信息战场的重要节点。
同时随着合成孔径雷达的快速发展,不仅具有为地面静止目标进行高分辨率成像,而且具有显示地面移动目标的三维成像。
一、合成孔径雷达原理合成孔径雷达(SAR)是一种新型雷达,具有较强的干扰能力和良好的图像效果,在军事领域广泛使用。
与普通雷达相比,合成孔径雷达具有高分辨率,工作时间长,可以识别和透射伪装。
合成孔径雷达取决于平台的运动以实现范围测量和二维成像,而方位分辨率随着波束宽度而增加,并且随着天线尺寸变大而变小。
类似于光学透镜的原因,雷达需要更大的天线和孔径,以确保设备能够在低频状态下形成更清晰的图像。
但是,在实际应用中,合成孔径雷达可以根据长线性阵列的移动轨迹通过移动。
在整个移动过程中,合成孔径雷达系统发射一定频率的辐射并形成信号。
太赫兹逆合成孔径雷达相位误差分析和补偿方法

太赫兹逆合成孔径雷达相位误差分析和补偿方法刘磊;周峰;陶明亮;张子敬【期刊名称】《强激光与粒子束》【年(卷),期】2013(025)006【摘要】通过对太赫兹逆合成孔径雷达(THz-ISAR)成像原理进行分析,构造目标回波距离维相位误差的多项式表示形式,提出了基于启发式最小熵搜索的二次相位误差校正方法和基于距离维自聚焦的三次及三次以上相位误差校正方法,校正了THz-ISAR回波信号距离维的相位误差,进而消除THz-ISAR一维距离像和二维成像结果中的散焦和展宽现象.理论分析和仿真实验结果都表明该方法能够有效补偿目标回波距离维相位误差,提高一维距离像和二维成像的聚焦效果.【总页数】6页(P1469-1474)【作者】刘磊;周峰;陶明亮;张子敬【作者单位】西安电子科技大学雷达信号处理国防科技重点实验室,西安710071;西安电子科技大学雷达信号处理国防科技重点实验室,西安710071;西安电子科技大学雷达信号处理国防科技重点实验室,西安710071;西安电子科技大学雷达信号处理国防科技重点实验室,西安710071【正文语种】中文【中图分类】TN95【相关文献】1.一种基于相位补偿的前向散射阴影逆合成孔径雷达快速成像方法 [J], 刘长江;胡程;曾涛;周超2.采用格林函数分解的太赫兹逆合成孔径雷达近场成像算法 [J], 张彪;皮亦鸣;李晋3.基于相位补偿和等效运动的太赫兹SAR运动目标成像方法 [J], 张野;吴称光;邓彬;秦玉亮;王宏强4.基于全相位FFT的太赫兹InISAR高精度测角方法 [J], 袁云权[1];宫俊[2];刘亚奇[2];付朝伟[2]5.太赫兹SAR高频振动误差补偿方法 [J], 陈经纬;安道祥;陈乐平;周智敏因版权原因,仅展示原文概要,查看原文内容请购买。
合成孔径雷达成像几何机理分析及处理方法研究
合成孔径雷达成像几何机理分析及处理方法研究合成孔径雷达作为二十世纪出现的尖端对地观测技术,由于它具有全天时、全天候的成像能力并能穿透一些地物,在土地覆盖制图、生态和农业、固体地球科学、水文、海冰等众多领域有着广泛的应用。
随着未来更高分辨率、多极化、多波段、更优化的干涉测量设计的SAR系统的出现,合成孔径雷达遥感技术将会在更多的领域扮演更重要的角色。
合成孔径雷达遥感技术在我国有着极大的潜在应用市场,对于某些特殊问题的解决,例如西部困难地区的地形图测绘及南方阴雨地区地形图的快速更新,它甚至是唯一可行的解决之道。
由于有关几何处理、辐射定标等基础问题没有很好地解决,影响了这一技术在我国的大规模应用及产业化进程。
本文致力于解决SAR影像的几何问题及与地形有关的辐射问题,对合成孔径雷达图像的几何特性作了系统深入的研究,以对构像方程的分析及推导为中心,研究并解决了包括地理编码、目标定位、影像模拟、利用控制点进行空间轨道精确重建、地形辐射影响的消除等一系列问题。
为了加强对合成孔径雷达图像的理解,首先对合成孔径雷达成像的技术本质从数学上进行了简明阐述。
从信号处理的角度,分析了脉冲压缩的工作原理,解释了匹配滤波器的构造。
分析了多普勒频率的特征及其作用。
从理论上推导了SAR距离向和方位向分辨率所能达到的极限值,并且指出了他们在实际中的限制。
从系统的角度,分析了SAR距离向和方位向模糊度的限制。
构像方程是所有几何处理的基础。
为推导了SAR构像方程,在定量分析了地球摄动力对卫星轨道影响的基础上,提出了一套改进的SAR轨道参数模型,与国外已有的模型相比,该模型更加简洁而且具有极高的精度。
从距离方程和多普方程出发,推导了建立在轨道参数和成像处理参数基础上的SAR构像方程。
将SAR几何校正问题分解为地理编码与空间定位两方面,以构像方程为基础,通过牛顿迭代法解决了SAR地理编码问题。
对空间定位的重要意义进行了分析,因为它是一个二维平面到三维空间的反演问题,实际解算非常困难,本文提出了一种巧妙的解决方案。
合成孔径雷达成像技术及应用分析
合成孔径雷达成像技术及应用分析摘要:合成孔径雷达是一种新体制雷达,具有全天候工作、穿透地表、高分辨率等独有特点,使其广泛应用于军民领域。
本文介绍了合成孔径雷达的成像原理,剖析了其关键技术及实现方法,并结合应用现状对其未来发展趋势进行了分析。
关键词:合成孔径雷达;信号处理;发展趋势合成孔径雷达(SAR)是利用合成孔径原理、脉冲压缩技术和数字信号处理方法,以真实的小孔径天线获得距离、方位双向高分辨率遥感成像的雷达系统,通常安装在飞机、卫星等平台上,不受光照和气象条件限制,可在能见度极低的情况下得到类似光学照相的雷达图像,具有全天时全天候工作、穿透云雾和植被、低频段穿透地表、分辨率高等优点。
合成孔径的概念始于20世纪50年代初期,首次使用是在50年代后期装配在RB-47A和RB-57D 战略侦察机上。
一、合成孔径雷达的工作原理用一个小天线作为单个辐射单元,将此单元沿一直线移动,在不同位置上接收同一地物的回波信号并进行相关解调压缩处理,一个小天线通过“运动”方式就合成一个等效“大天线”,可以得到较高的方位向分辨率。
合成孔径雷达工作时按一定的重复频率收发脉冲,真实天线依次占一虚构线阵天线单元位置,把这些单元天线接收信号的振幅与相对发射信号的相位叠加起来,便形成一个等效合成孔径天线的接收信号。
合成孔径雷达工作原理示意图地物的反射波由合成线阵天线接收,与发射载波作相干解调,并按不同距离单元记录在照片上,然后用相干光照射照片便聚焦成像。
相参性是合成孔径雷达系统获得高分辨率的必要条件,发射信号、本振电压、相参震荡电压和定时器的触发脉冲均由同一基准信号产生,接收机也需要具备很高的时间精度。
二、合成孔径雷达关键技术(一)数字信号处理技术。
影响合成孔径雷达性能的关键因素是数据处理速度,因为SAR需要存储大量雷达回波,并对一定时间间隔内的信号进行相干积累和实时解算,对数据容量、读写速度、运算方法等都提出了较高的要求,而且探测区域越大、分辨率越高,信息量就越大,对数据处理的要求也就越严格。
合成孔径雷达成像与系统分析研究

合成孔径雷达成像与系统分析研究合成孔径雷达是一种高分辨率、高精度的雷达成像技术,它利用雷达波形的相干性,在多次发射与接收后,将多条回波信号叠加与相干处理,从而获得高分辨率的雷达图像。
在军事、民用和科学研究等领域中广泛应用。
本文将对合成孔径雷达的原理、系统构成、成像技术和应用等进行分析和研究。
一、合成孔径雷达原理合成孔径雷达的成像原理是利用雷达波的强度和相位变化,叠加已知的波形和多次反射回波的信息,对返回信号进行相干积累来提高雷达分辨率。
相比于常规雷达技术,合成孔径雷达使用的多普勒效应和方位效应,能够提高雷达图像的分辨率和强度,从而获得更清晰、更精确的成像效果。
二、合成孔径雷达系统构成合成孔径雷达的系统构成包括雷达发射机、接收机、天线、数字信号处理器、计算机等多个组成部分。
它们共同完成雷达成像的全流程。
1、雷达天线合成孔径雷达天线是实现雷达成像的关键部分。
传统的雷达天线是触碰式的圆柱形天线,而合成孔径雷达天线则需要操作类似阵列天线的天线,这样可以使天线有效收到反向散射回波信号。
2、数字信号处理器合成孔径雷达在进行成像前,需要对接收到的信号进行信号处理,去除杂波和干扰,提取出目标回波信号。
数字信号处理器是实现信号处理的关键部分,它能够对接收到的信号进行滤波、降噪、FFT、相位干涉等处理。
3、计算机计算机是合成孔径雷达进行成像的核心控制部分。
它主要负责处理数字信号的卷积、相参、叠加以及展示等工作。
计算机分辨能力的提高使得合成孔径雷达的成像精度大大提升。
三、合成孔径雷达成像技术1、成像的原理合成孔径雷达成像的基本原理是相干积累算法和干涉成像技术。
相干性积累算法是将一定数量的相干回波信号叠加,使得回波信号的信噪比(SNR)最大化。
在这个过程中,回波信号的强度将以二次方的速度增大,但要达到 SNR = 1 需要接收到无数个回波的数据。
因此,在实际应用中,合成孔径雷达往往都需要大量的数据。
2、解析与通用合成孔径雷达的成像技术在解析与通用性方面优于其他常规雷达成像技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于机理的合成孔径雷达系统成像误差理论分析基于机理的合成孔径雷达系统成像误差理论分析①葛咏王劲峰(中国科学院地理科学与资源研究所资源与环境信息系统国家重点实验室,北京, 100101)摘要:目前在遥感和G IS中,关于误差和不确定性研究的主要方法有两种:概率统计和机理1 前言尽管遥感为空间数据库获取数据十分迅速,但我们对数据处理过程中误差的理解,尤其是多种空间数据的集成中的误差了解甚少(L unet taeta l1,1991).由于误差的存在降低了最终遥感图像的可信度,同时也使遥感图像用于决策支持的范围受到了限制.因此对可能的误差源,及其影响大小的分析即成为一个重要的问题.目前关于误差和不确定性研究的主要方法有两种:概率统计和机理模拟.概率统计误差研究的主要原理是假设或经验求解最终误差的分布函数形式,然后用一定的识别函数根据一些已知点(监督点)值外推未知点值,并将其识别函数统计误差和不确定性用一定的函数形式表达出来.机理模拟首先应建立系统各环节的信息传递函数,然后进行误差灵敏度分析,并且考虑在系统元器件的工艺水平,经济价格和物质属性的约束条件下,进行误差的最优控制,指导系统总体设计.当前遥感误差研究主要是基于概率统计和证据理论.如N ew com er和Sza jg in(1984),V erg in(1989),H euvelink(1989, 1993)等的不确定性分析及史文中,刘文宝和张景雄等对遥感和G IS的位置和属性不确定性分析.统计方法的优点是简单,适用性强.但统计模型一般是描述性的,对观测数据作经验性的统计描述,或者进行相关分析,不解答为什么会有这样的结果(李小文, 1995;齐欢,1996).鉴于此,本文提出了基于SA R系统机理的误差分析方法.误差机理模型可以用来模拟全系统的信息流,分析模拟各环境因素的影响,预测最终识别对象的误差和不确定性,从而提高了SA R图像的精度,并且指导系统优化设计.关键是必须对全系统的物理原理有清晰的了解,并且建立起各环节的信息传递函数.这一问题的研究不仅有助于遥感信息提取和遥感信息反演,而且对遥感数据的质量控制的研究,以及合成孔径雷达的研制具有指导意义.2 统计方法处理SA R成像误差在获取一幅SA R图像后,用统计的手段进行误差处理所采取的方法:辐射定标,天线方向图校正,几何纠正等.在这种情况下是采用多项式拟合的方法来求得图像上每一系列的调整系数.在这里暂不考虑由于地形因素而产生的几何畸变.可以看出,利用统计的方法进行SA R系统成像误差的处理仅是利用已知数据进行回归校正,并不考虑各个误差在整个过程中的传递状况和对雷达图像的影响大小.3 机理方法处理SA R成像误差机理方法就是利用雷达信号的误差传递模型.其步骤如下:首先探测从信号发射到接收成像及后处理每一个步骤潜在的误差源;然后根据每一步的输入变量,输出变量及状态变量,建立SA R信号传递函数;第三,将各部分信号传递函数组合成一个误差传播模型,然后用灵敏度分析的方法探测和确定每一个误差对SA R图像影响的大小;最后,计算误差改正数并将其加到相应SA R图像像元上,以提高SA R图像的精度.第1期2000年3月地球信息科学GEO- IN FO RM A T IONSC IEN CEN o11M a r1, 2000①本项研究属中科院KZ9512A12302,KZ95T203,KJ9512B12703,国家自然科学基金69896250成果.1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.311 SA R成像系统关于SA R系统的成像原理[ 9~12 ]另有详述.在这里简要介绍一下SA R系统的组合.在工程控制系统中,系统的组成可由子系统的串联,并联和反馈三种方式组合而成.由于SA R信号从发射到接收总体看来是依照串行方式传递的,所以把SA R成像系统看作是各个子系统的串联组合.这里包括三个子系统:发射接收子系统S1;数据处理子系统S2;图像形成子系统S3.在本文的研究中,限于篇幅仅讨论发射接收子系统S1的传递函数和误差分析,数据处理子系统S2和图像形成子系统S3,及其传递函数的整合将在另文中讨论.图1 SA R系统组合312 误差来源和误差分类分析SA R成像系统各个子系统和环节的主要误差来源,可通过下图来描述:图2中各环节产生不同类型,大小的误差并且叠加以对上一环节传递的误差造成的畸变,然后传入下一环节,造成最终目标地物识别或分类的误差和不可确定性.图2 SA R系统的误差来源按测量误差对观测结果的影响,可将测量误差分为粗差,系统误差和随机误差.表1是按照误差特性将误差分类.本文假定剔除了粗差的影响.文中所讨论的是相位误差中的时相误差,其它误差类表1 误差分类型将在后文中探讨.313 传递函数理想状态下的发射信号,为了改善雷达距离向分辨率,通常采用线性调频脉冲信号:St(t)=a(t)ej(wct+P12krt2)(1)式中a(t)为窄带信号的包络函数;kr为发射脉冲线性调频信号速率,kr=BTS,BT为线性调频信号带宽,S为脉冲长度;wc发射信号的载频,wc= 2Pc K.通过点目标散射,雷达接收到的信号为:Sr(t)=RE[1S(t-2Rc-(x-x0)2Rc)]ejU(t)(2)R E表示回波信号Sr(t)复数的实部,其中相位角函数U(t)为:U(t)=wct-wcA+P12kr(t-A)24PRK-2PKR(x-x0)292 1期葛咏等:基于机理的合成孔径雷达系统成像误差理论分析1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.+P12kr(t-2Rc)2-Pkr(t-2Rc)(x-x0)2Rc+P12kr4R2(x-x0)4c24R4(3)上式中第一项为载频,第二项为固定相位,第三项为方位多普勒信号,第四项为距离向线性调频信号,第五项为方位向和距离向耦合信号.第六项为高阶无穷小项.经过同步检波,减去载频和固定相位,并略去了方位向和距离向的耦合项(机载雷达),相位简化为:U(t)= -2PKR(x-x0)2+P12kr(t-2Rc经过振幅归一化,接收信号为:Sr(x,t)=e-j2PKR(x-x0)2 ej12kr(t-2Rc)2(5)第一项为方位多普勒信号,第二项为距离向线性调频信号.x=vAt时间函数,vA为航向速度;x为点目标在地面坐标系中沿x方向的坐标;x0表示雷达载机沿x轴的坐标;K为波长;R为点目标离载机航线的垂直距离;(3)式中A为点目标回波延迟时间A=2Rc[ 1+(x-x0)22R2]≈2Rc.314 误差分析相干合成孔径雷达系统是依赖地形目标回波的二次相位信息来获得高分辨率图像的,因此对雷达信号的相位稳定性提出了严格的要求[ 12 ].造成合成孔径雷达中相位误差的主要来源有:(1)雷达设备的不稳定;(2)载机的随机运动;(3)雷达信号通过大气传播引起的随机相位误差;(4)数字成像系统模型的不完备.因此,可设相位误差为:$U=$U雷达设备+$U载机运动+$U大气传播+$U其它(6)下面将逐一对每一种相位误差进行定性和定量分析.1)雷达设备的不稳定首先,雷达设备不稳定产生的相位误差主要是由基准信号源频率的不稳定,锁相环路引入相位起伏,显示扫描起点抖动等误差因素引起的.其式:$U雷达设备=$U信号源不稳定+$U锁相环路+$U扫描抖动(7)(1)基准信号源频率的不稳定引起时相误差.由于频率的不稳定是一个非平稳随机过程,测量比较困难,因此采用时相误差的方差来表示:R2信号源不稳定=(2PfT1)2R2y(T1)B1(N,r,u)B2(r,u)(8)式中R2y(T1)为阿伦方差;B1(N,r,u)B2(r,u)为B a rn偏函数[ 12 ].(2)锁相环路引入相位起伏可用相位起伏均方差来表示.(3)显示扫描起点抖动既引起距离分辨率下降,又引起方位向分辨率的下降,用R扫描抖动来表示.但由于在数字成像处理过程中,要进行方位向和距离向的脉冲压缩,因此二者的误差可忽略不计.从上面分析可以看出,雷达设备的不稳定将造成雷达回波的随机相位误差,用e雷达设备表示,其方差可用下式表示:R2雷达设备= +R2信号源不稳定+R2锁相环路+R2扫描抖动(9)2)载机的随机运动在以上的讨论,假定雷达载机在成像飞行过程中,始终保持水平,直线和均速飞行.同时保持天线波束最大值方向与航迹正交.但是由于大气干扰和机动飞行的影响,载机的实际飞行状态总会产生转动和平移两类随机运动,对于转动即偏航,俯仰,横滚可通过稳定天线平台作部分校正,保持天线指向初步稳定.对于载机的平移运动可以利用运动补偿系统(杂波锁定,径向补偿和航向补偿)来完成.杂波跟踪除了用来校正陀螺的长期漂移造成的多卜勒频谱中心不稳定外,还能对如天线定位一类固定误差造成的多卜勒频谱中心偏移进行改正.但运动补偿系统还会有补偿残留误差,一般包括:由于补偿系统精度不够造成的误差和由于定点式补偿方式在测绘带两边产生的误差(张澄波, 1989;谢寿生, 1987).鉴于以上分析,将其误差表达成下式:$U载机运动=$U转动-$U天线平台校正+$U平移-$U运动补偿=$U运动补偿残留误差(10)$U运动补偿残留误差=$U精度不够+$U定点补偿误差=PKRk2rvA4Q2AvA+PKRk2rA 4Q2Av2A(11)这里先只考虑运动补偿系统精度不够产生的相位误差,定点补偿误差将在以后继续讨论.第一项为航向补偿残留速度误差所产生的二次相位误差,其中:K为波长;R为点目标离载机航线的垂直距离;K为常数;QA为方位分辨率;vA,rA分别为航向速度和航向速度残留误差.由于径向速度误差残留误差和杂波锁定误差对相位误差影响可以忽略.03 地球信息科学2000年3月1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.因此第二项为矢量计算机系统精度对相位误差影响,其中:rA为残留的加速度.3)大气传播大气传播产生的相位误差包括折射率不均匀造成传播路线偏离直线而产生的相位误差;大气湍流造成的相位误差等,可由下面公式计算:$U大气传播= 1168×10- 6(TCEC) f0(12)式中:f0——雷达频率;T C E C——微波波束在电离层中沿着传播路径圆柱的 4Q2AvA+PKRk2rA 4Q2Av2A+ 1168×10- 6(TCEC) f0+$U其它(13)除了以上分析的误差源以外,另外还有载机非线性飞行,系统非线性,航向和垂直速度测量误差等一些误差源所引起的相位畸变均归为$U其它中.根据表1分类,可以将雷达设备不稳定产生的误差归为随机误差,载机运动和大气影响产生的误差则看作确定性误差,即系统误差.我们用5表示回波相位的测量值,U表示回波相位的真值,$U表示回波相位的误差,则可以用下式表达三者的关系:5=U+$U= -2PKR(x-x0)2+P12-2R2c+$U= -2PKR(x-x0)2+P12krt-2Rc+PKRk2rvA4Q2AvA+PKRk2rA 4Q2Av2A+ 1168×10- 6(TCEC) f0+e雷达设备+$U其它(14)同时雷达波在大气的传播中还受到对流层的衰减,背向,散射以及色散等影响,所以雷达波在大气的传播中还将产生幅度误差.但由于这些误差对于雷达图像的影响是具有整体效果,可看作是系统误差,在图像处理的过程中进行整体处理.4 误差灵敏度分析灵敏度分析是从理论上研究误差传递函数中输入信息和输出信息之间的关系,以及输出信息中的误差随输入信息中的误差变化而变化的规律,即影响SA R图像质量主次因素的排序.灵敏度分析法的数学原理可参见参考文献3, 16, 17.下面我们简要介绍一下灵敏度分析法在SA R成像中的应用.5= -2PKR(x-x0)2+P12krt-2R2c+$U雷达设备+PKRk2rvAAvA+PKRk2rA 4Q2Av2A+ 1168×10- 6(TCEC) f0+$U其它(15)当残留加速度rA发生一个变化量$rA,5也相应有一个变化$5,则单变量增量灵敏度为:SrA=$5 $rA(16)依靠误差传递函数进行灵敏度分析可以解决下列问题:(1)当缺少实际数据或不确定性信息时,可用灵敏度分析进行理论上的不确定传播分析(通过不断的改变输入信息,观察输出信息的变化率);(2)灵敏度分析能提供影响因素重要性的排序问题以及探测误差传递函数的稳定性;(3)当给定输出信息的质量限值后,利用灵敏度分析可以确定输入信息质量的临界值(刘文宝, 1995);(4)不仅可以定性和定量的分析SA R成像各个进程中误差的影响大小,同时利用分析结果指导SA R系统元器件的设计和系统优化.5 结论和展望本文分析了在遥感和G IS的误差研究中的两种主要方法:概率统计和机理模拟的特点,结合SA R系统成像原理,提出机理的方法分析SA R系统成像误差.在系统成像原理的基础上,详细讨论了影响合成孔径雷达成像的诸多因素.并利用灵敏度分析的方法探测和确定每一个误差对SA R图像影响的大小.在后续工作中,利用误差传递函数和灵敏度分析的结果计算SA R系统的成像误差.然后,将误差改正数加到相应SA R图像像元上,从而提高了SA R图像的精度.这一问题的研究不仅对研制合成孔径雷达的设计具有指导意义,而且对遥感数据的质量控制,遥感信息反演的研究也有着重要意义.13 1期葛咏等:基于机理的合成孔径雷达系统成像误差理论分析1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.参考文献[ 1 ]史文中1空间数据误差处理的理论与方法1北京:科学出版社, 1998[ 2 ]张景雄,杜道生1位置不确定性与属性不确定性的场模型1测绘学报, 28(3), 1999[ 3 ]刘文宝1G IS空间数据的不确定性理论(学位论文)1武汉:武汉测绘科技大学, 1995, 8[ 4 ]齐欢1数学模型方法1武汉:华中理工大学出版社, 1996[ 5 ]李德仁1误差处理和可靠性理论1北京:测绘出版社,1988[ 6 ]张文修,梁怡1不确定性推理原理1西安交通大学出版社, 1996[ 7 ]宫鹏,史培军等1对地观测技术与地球系统科学1北京:科学出版社, 1996[ 8 ]黄幼才等1G IS空间数据误差分析和处理1武汉:中国地质大学出版社, 1995, 6[ 9 ]钱学森1工程控制论1北京:科学出版社, 1958[ 10 ]王效武1现代控制理论基础1北京:机械工业出版社,1998, 10[ 11 ]舒宁1雷达遥感原理1测绘出版社, 1997[ 12 ]张澄波1综合孔径雷达原理,系统分析与应用1科学出版社, 1989[ 13 ]谢寿生,徐永进1微波遥感技术与应用1电子工业出版社, 1987[ 14 ]娄晓光1机载,星载合成孔径雷达成像,定标,图像处理的研究1中国科技大学研究生院硕士论文, 1997[ 15 ]周江文1系统误差的数学处理1测绘工程,N012, 1999[ 16 ]Co rne llU n ive r sity,U nce r ta in ty1h t tp: www sca s1 cit1co rne ll1edu landeva l leno te s s494ch5p1h tm,1995[ 17 ]Co rne llU n ive r sity,M o de ling1h t tp: www sca s1cit1co rne ll1edu landeva l leno te s s494ch3p1h tm, 1995[ 18 ]H euve linkGBM1B u r ro ughPAandS te inA11989,P rop aga t io no fe r ro r sinsp a t ia lm o de llingw ithG IS,In te rna t io na lJo u rna lo fGeo g rap h icInfo rm a t io nSy stem, 3(4): 303~322J G IS[ 19 ]H euve linkGBM11993,E r ro rp rop aga t io ninquan t ita t ivesp a t ia lm o de lling,A pp lica t io ninGeo g rap h icInfo rm a t io nSy stem s1PhDT he sis[ 20 ]L une t ta,R1Se ta l(1991)1,R em o tesen singandgeo g rap h icinfo rm a t io nsy stemda tain teg ra t io n:e r ro r so u rce sandre sea rchissue s,Pho to g ramm e t r icEng inee r ing&R em o teSen sing,V o l57,N o16,pp1677- 687[ 21 ]N ew com e rJA,Sza jg inJ11984,A ccum u la ito no fthem a t icm ape r ro r sind ig ita lo ve r layana ly sis1T heAm e r icanCa r to g rap he r11(1): 58- 62[ 22 ]V e reg inH11989,E r ro r sm o de llingfo rthem apo ve r lay op e ra t io n1In:Goo dch ildMFandGop a ls,e tT heA ccu racyo fSp a t ia lda taB a se,N ewYo rk:T ay lo randF rancis[ 23 ]V e reg inH11989,AT axo nom yo fe r ro rinsp a t ia lD a taba se,N a t io na lCen te rfo rGeo g rap he rInfo rm a t io n andA na ly sis1T echn ica lPap e r89~12: 115M echan ism-BasedSARImag ingSystemErrorTheoryAnalysisGeYong W angJ infeng(S ta teK eyL abora toryofR esou rcesandE nv ironm en ta lI nf orm a tionS y stem,I nstitu teofG eog rap hy,CA S,B eij ing100101)AbstractCu ren t sTw ok ind sofm ethod stavebeendavelop edindea lingw itherro randuncerta in tyinrem o tesen singandgeog rap h icinfo rm a t ionsy stem1oneissta t ist icsm ethod1T heo therism echan ismana ly sism ethod1W ed iscu ssedthecha racterist icsofthesem ethod sresp ect ively1G inenthesho rtcom ingofsta t ist icsm ethod,w ep ropo sedonem ethodbelong ingtom echan ismm ethodtoana ly siserro rp rop aga t ioninSyn thet icA p ertu reR ada r1Itisveryim po rtan tva luetoda taqua litycon t ro landinversionofrem o tesen sing1Keywords:SA R E rro r Sta t ist icsm ethod M echan ismA na ly sisM ethod Con t ro lT heo ry E rro rP rop aga t ionM odel23 地球信息科学2000年3月1995-2004 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.。