角位移传感器4
第四系地层预应力混凝土管桩承载性状现场试验研究

第 54 卷第 8 期2023 年 8 月中南大学学报(自然科学版)Journal of Central South University (Science and Technology)V ol.54 No.8Aug. 2023第四系地层预应力混凝土管桩承载性状现场试验研究闫楠1,孙淦1,袁炳祥2,范清厚3,岳志兴4,桑松魁1,李方强4,孙建文5,白晓宇1(1. 青岛理工大学 土木工程学院,山东 青岛,266520;2. 广东工业大学 土木与交通工程学院,广东 广州,510006;3. 中国二冶集团有限公司,内蒙古 包头,014010;4. 山东电力建设第三工程有限公司,山东 青岛,266037;5. 山东省核工业二四八地质大队,山东 青岛,266041)摘要:基于印尼某工程15根预应力混凝土管桩(PC 管桩)的单桩竖向抗压、抗拔及水平静载荷试验,分析PC 管桩分别在竖向荷载和水平荷载作用下的承载特征,揭示不同荷载水平下PC 管桩的承载力发挥机制。
基于单桩竖向抗压极限承载力预测模型,对比分析指数曲线模型、双曲线模型及调整双曲线模型的可行性,并对PC 管桩单桩竖向抗压极限承载力进行预测;结合水平静载试验,探讨地基土水平抗力系数的比例系数m 的取值问题。
研究结果表明:PC 管桩单桩竖向抗压承载力主要取决于桩端持力层的支承力,同时也受桩径、桩长的影响较大;PC 管桩的竖向抗拔承载力主要取决于桩侧摩阻力,桩径越大、桩长越长,单桩竖向抗拔承载力越高;PC 管桩水平承载力主要取决于桩侧土体的力学性质。
就本试验而言,指数曲线模型对单桩极限承载力的预测最精确;m 在桩顶水平位移超过10 mm 时变化平稳并逐渐收敛为常数,通过试验结果反推的m 接近甚至超过JGJ 106—2014中推荐m 的上限值。
关键词:预应力混凝土管桩;单桩抗压静载试验;单桩抗拔静载试验;单桩水平静载试验;竖向承载力预测中图分类号:TU473.1 文献标志码:A 文章编号:1672-7207(2023)08-3273-13Field test study on bearing behavior of the fourth strataprestressed concrete pipe pileYAN Nan 1, SUN Gan 1, YUAN Bingxiang 2, FAN Qinghou 3, YUE Zhixing 4, SANG Songkui 1,LI Fangqiang 4, SUN Jianwen 5, BAI Xiaoyu 1(1. School of Civil Engineering, Qingdao University of Technology, Qingdao 266520, China;收稿日期: 2022 −09 −27; 修回日期: 2022 −11 −25基金项目(Foundation item):山东省自然科学基金重点资助项目(ZR2020KE009);国家自然科学基金资助项目(51708316);山东省博士后创新项目(201903043);山东省高等学校科技计划项目(J16LG02) (Project(ZR2020KE009) supported by the Key Program of Natural Science Foundation of Shandong Province; Project(51708316) supported by the National Natural Science Foundation of China; Project(201903043) supported by the Postdoctoral Innovation of Shandong Province; Project(J16LG02) supported by the Higher School Science and Technology Plan of Shandong Province)通信作者:白晓宇,博士(后),副教授,博士生导师,从事地基基础及城市地下工程研究;E-mail :********************DOI: 10.11817/j.issn.1672-7207.2023.08.029引用格式: 闫楠, 孙淦, 袁炳祥, 等. 第四系地层预应力混凝土管桩承载性状现场试验研究[J].中南大学学报(自然科学版), 2023, 54(8): 3273−3285.Citation: YAN Nan, SUN Gan, YUAN Bingxiang, et al. Field test study on bearing behavior of the fourth strata prestressed concrete pipe pile[J]. Journal of Central South University(Science and Technology), 2023, 54(8): 3273−3285.第 54 卷中南大学学报(自然科学版)2. School of Civil and Transportation Engineering, Guangdong University of Technology, Guangzhou 510006, China;3. China Second Metallurgical Group Co. Ltd., Baotou 014010, China;4. SEPCO Ⅲ Electric Power Construction Co. Ltd., Qingdao 266037, China;5. 248 Geological Brigade of Shandong Nuclear Industry, Qingdao 266041, China)Abstract:Based on the vertical compressive, pull-out and horizontal static load tests of 15 prestressed concrete pipe piles(PC pipe piles) in a project in Indonesia, the bearing characteristics of PC pipe piles under vertical and horizontal loads were studied. The mechanism of bearing capacity of PC pipe piles under different loads was revealed. Based on the prediction model of the vertical compressive ultimate bearing capacity of the single pile, the feasibility of exponential curve model, hyperbolic model and adjusted hyperbolic model was compared and analyzed, and the prediction of vertical compressive ultimate bearing capacity of the PC pipe pile was carried out. Combined with the horizontal static load test, the proportional coefficient m of the horizontal resistance coefficient of foundation soil was discussed. The results show that the vertical compressive bearing capacity of a single pile of PC pipe piles mainly depends on the supporting force of the bearing layer at the pile end, and is also greatly influenced by the diameter and length of the pile. The vertical uplift bearing capacity of the PC pipe pile mainly depends on the size of the pile side frictional resistance. The larger the pile diameter and the longer the pile length, the higher the vertical uplift bearing capacity of a single pile. The horizontal bearing capacity of PC pipe piles mainly depends on the mechanical properties of the soil on the pile side. The exponential curve model has the most accurate prediction of the ultimate bearing capacity of the single pile for the purpose of this test; m changes steadily after the horizontal displacement of the pile top exceeds 10 mm and gradually converges to a constant value. m deduced from the test results is close to or even exceeds the upper limit of m recommended by JGJ 106—2014.Key words: prestressed concrete pipe pile; single pile compressive static load test; single pile uplift static load test; single pile horizontal static load test; vertical bearing capacity prediction通过先张法预应力工艺和离心成型法制成的预应力混凝土管桩(PC管桩),因其具有单桩承载力高、成桩质量高、施工简单、造价低廉及施工污染小等优点,被大量应用于工业与民用建筑等领域[1−2]。
第四章传感器原理习题
第四章 传感器原理习题4-1以阻值R =120Ω,灵敏系数K =2.0的电阻应变片与阻值120Ω的固定电阻组成电桥,供桥电压为3V ,并假定负载电压为无穷大,当应变片的应变为2με和2000με时,分别求出单臂、双臂差动电桥的输出电压,并比较两种情况下的灵敏度。
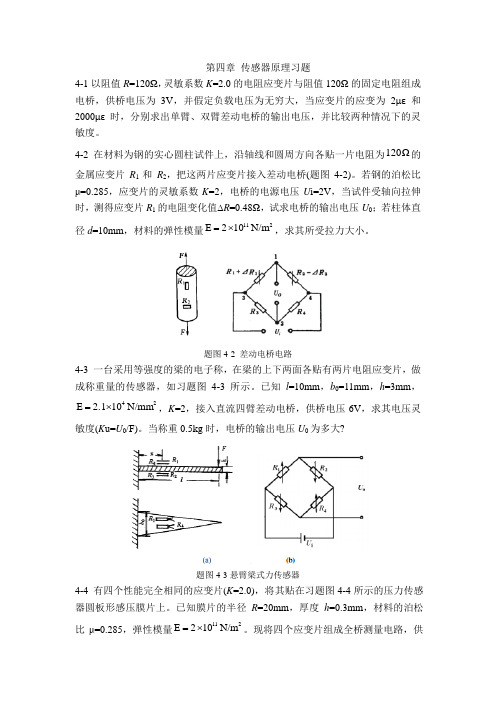
4-2 在材料为钢的实心圆柱试件上,沿轴线和圆周方向各贴一片电阻为Ω120的金属应变片R 1和R 2,把这两片应变片接入差动电桥(题图4-2)。
若钢的泊松比μ=0.285,应变片的灵敏系数K =2,电桥的电源电压U i=2V ,当试件受轴向拉伸时,测得应变片R 1的电阻变化值∆R =0.48Ω,试求电桥的输出电压U 0;若柱体直径d =10mm ,材料的弹性模量211N/m 102E ⨯=,求其所受拉力大小。
题图4-2 差动电桥电路4-3 一台采用等强度的梁的电子称,在梁的上下两面各贴有两片电阻应变片,做成称重量的传感器,如习题图4-3所示。
已知l =10mm ,b 0=11mm ,h =3mm , 24N/mm 102.1E ⨯=,K =2,接入直流四臂差动电桥,供桥电压6V ,求其电压灵敏度(K u=U 0/F)。
当称重0.5kg 时,电桥的输出电压U 0为多大?题图4-3悬臂梁式力传感器4-4 有四个性能完全相同的应变片(K =2.0),将其贴在习题图4-4所示的压力传感器圆板形感压膜片上。
已知膜片的半径R =20mm ,厚度 h =0.3mm ,材料的泊松比μ=0.285,弹性模量211N/m 102E ⨯=。
现将四个应变片组成全桥测量电路,供桥电压U i=6V 。
求:(1)确定应变片在感压膜片上的位置,并画出位置示意图;(2)画出相应的全桥测量电路图;(3)当被测压力为0.1MPa 时,求各应变片的应变值及测量桥路输出电压U 0;(4)该压力传感器是否具有温度补偿作用?为什么?(5)桥路输出电压与被测压力按是否存在线性关系?题图4-4 膜片式压力传感器4-5一测量线位移的电位器式传感器,测量范围为0~10mm ,分辨力为0.05mm ,灵敏度为2.7V/mm ,电位器绕线骨架外径d =0.5mm ,电阻丝材料为铂铱合金,其电阻率为mm Ω103.25ρ4⋅⨯=-。
2022-2023年人教版(2019)新教材高中物理选择性必修2 第5章传感器第2节常见传感器(4)

1.传感器按照一定的规律把非电学量转化为电 学量,可以很方便地进行测量、传输、处理 和控制.
2.光敏电阻能够把光照强弱这个光学量转换为 电阻这个电学量.
3.热敏电阻和金属热电阻能把温度这个热学量 转换为电阻这个电学量.
4.电容式位移传感器能把物体位移这个力学量 转换为电容这个电学量.
D.图线2的材料化学稳定性差、测温范围小、灵敏度高
解析:金属热电阻的阻值随温度升高而增大,半导体材料的 热敏电阻的阻值随温度升高而减小,其变化规律均不成比例, 所以A错误,B对,由图像可以看出,图线1对应的材料化学稳 定性好但灵敏度低,图线2对应的材料化学稳定性差但灵敏 度高,所以C错误D对. 答案:BD
半导体
金属
优点 灵敏度好
化学稳定性好,测温范围大
作用 将 温度 这个热学量转换为 电阻 这个电学量
3.如图6-1-1所示为电阻R随温度T
变化的图线.下列说法中正确的是
()
图6-1-1
A.图线1是热敏电阻的图线,它是用金属材料制成的
B.图线2的热敏电阻的图线,它是用半导体材料制成的
C.图线1的材料化学稳定性好、测温范围大、灵敏度高
信号的主要工具
解析:传感器的任务就是采集信息,A对;干簧管的主要构 造是由平行不接触的两个极易被磁化的软铁片组成的,它靠 近磁场时被磁化后相互吸引而接触,B对;由传感器的定义 知D对. 答案:ABD
1.特点
光照越强,电阻 越小.
2.原因
无光照时,载流子少,导电性能 不;好随着光照的增强,载流
子
,导电增性多
4.关于霍尔元件,下列说法正确的是
()
A.把温度这个热学量转化为电阻这个电学量
霍尔位移传感实验报告
一、实验目的1. 理解霍尔位移传感器的工作原理。
2. 掌握霍尔位移传感器的安装和调试方法。
3. 分析霍尔位移传感器的性能特点。
4. 验证霍尔位移传感器的测量精度和稳定性。
二、实验原理霍尔位移传感器是基于霍尔效应原理设计的。
当电流通过半导体材料,并受到垂直于电流方向的磁场作用时,在半导体材料的两侧会产生电压,这个电压称为霍尔电压。
霍尔电压的大小与磁感应强度、电流强度和半导体材料的厚度有关。
霍尔位移传感器通常由一个线性霍尔元件、永久磁钢组和测量电路组成。
当传感器沿轴向移动时,由于磁场分布的变化,霍尔元件的输出电压也随之变化,从而实现位移的测量。
三、实验仪器与设备1. 霍尔位移传感器2. 永久磁钢组3. 信号调理电路4. 数据采集器5. 移动平台6. 精密尺四、实验步骤1. 将霍尔位移传感器安装在移动平台上,确保传感器轴线与移动平台轴线一致。
2. 将传感器连接到信号调理电路,并进行电路调试,确保信号输出稳定。
3. 使用数据采集器记录传感器在不同位移位置下的输出电压。
4. 将实验数据与理论计算结果进行对比分析。
5. 改变传感器轴线与磁场方向的夹角,观察霍尔电压的变化,分析传感器的性能特点。
五、实验数据与结果分析1. 实验数据记录表| 位移(mm) | 霍尔电压(mV) | 理论计算值(mV) ||------------|----------------|------------------|| 0 | 0 | 0 || 1 | 0.5 | 0.5 || 2 | 1.0 | 1.0 || 3 | 1.5 | 1.5 || 4 | 2.0 | 2.0 |2. 实验结果分析(1)实验数据与理论计算值基本一致,说明霍尔位移传感器的测量精度较高。
(2)当传感器轴线与磁场方向的夹角为90°时,霍尔电压最大;当夹角为0°时,霍尔电压最小。
这表明霍尔位移传感器的输出电压与传感器轴线与磁场方向的夹角有关。
作业4 传感器答案(1)
作业4 位移传感器与位移测试班级:姓名:学号:成绩:一、填空题1、金属电阻应变片与半导体应变片的物理基础的区别在于,前者利用金属丝的几何变形(应变效应)引起的电阻变化,后者利用半导体材料的电阻率变化(压阻效应)引起的电阻变化。
2、差动变压器式电感传感器的基本原理是利用了电磁感应中的互感现象。
3、为了提高变极距电容式传感器的灵敏度、线性度及减小外部条件变化对测量精度的影响,实际应用时常常采用差动工作方式。
4、金属导体置于交流磁场中,导体表层产生闭合的电流,利用该原理制作的传感器称为电涡流传感器。
这种传感器只能测量金属导体物体。
5、光栅式传感器是依靠莫尔条纹的三大特性: 位移的放大特性,栅距误差的平均效应和__莫尔条纹运动与光栅运动的一一对应关系(光栅栅距与莫尔条纹间距的对应关系)__来进行位移的精密测量的。
6、差动变压器式传感器理论上讲,衔铁位于中心位置时输出电压为零,而实际上输出电压不为零,这个不为零的电压称为零点残余电压;利用差动变压器测量位移时,如果要求区别位移方向可采用差动整流电路或相敏检波电路。
7、电容式和电感式传感器常采用差动式结构,其作用是提高灵敏度,减少非线性度。
二、选择题1. 能够感受湿度的电容式传感器属于变 D 的电容式传感器。
A电阻率 B 相对面积 C 极距 D 介质2. 可变磁阻式传感器的灵敏度S与气隙长度δ有关,δ B灵敏度越高。
A 越大B 越小C 速度越快D 速度越慢3.为了提高自感式传感器灵敏度和线性度,实际应用时常采用D 工作方式。
A同步 B异步 C共模输入 D差动4. 不能用涡流式传感器进行测量的是 D 。
A位移 B材质鉴别 C探伤 D非金属材料5.电阻应变片的输入为 B 。
(A)力(B)应变(C)速度(D)加速度6.为减少变极距型电容传感器灵敏度的非线性误差,应选用 C 类型的传感器为最好。
(A)大间距(B)高介电常数(C)差动式(D)小间距7.金属丝应变片在测量构件应变时,电阻的相对变化主要由 B 来决定的。
CISR系统中传感器的应用(4)

C4ISR系统中传感器的应用鲍帮玉摘要:本文介绍了C4ISR系统的基本概念,分析了C4ISR 系统发展的制约因素和瓶颈。
从功能角度讨论和分析了传感器在C4ISR系统中应用的几个方面。
关键词:C4ISR系统;传感器;军事应用中图分类号:E919 文献标识码:A 文章编号:1006-883X(2003)06-0022-04一、引言随着新军事革命在全球范围的形成与发展,人们已渐渐意识到这场深刻变革的核心就是信息化。
在传统战争中,物质和能量是战斗力的标志,也是战斗力形成和提高的决定性因素。
从上个世纪末到本世纪初,以计算机为标志的信息技术得到了迅速的发展。
信息技术已经广泛应用于包括军事领域在内的人类活动的各个领域。
伴随着信息化系统和信息化武器装备的大量出现,信息的作用越来越重要。
与此同时,在技术的推动下新的需求又引导着新的应用系统产生。
C4ISR系统便是军事领域信息化建设过程中的典型产物。
表面上看作战是物质和能量的对抗,但是在信息时代这种对抗是在信息主导下实现的。
战斗力的提升和发挥几乎完全取决于及时的信息收集、处理、传递和使用。
C4ISR系统的主要功能便在于“在正确的时间、正确的地点,提供正确的信息”。
C4ISR系统正常运转的前提是有效的输入信息,而信息的获取在很大程度上是来自于各类传感器。
二、C4ISR概念C4ISR系统,是指挥、控制、通信、计算机、情报、监视与侦察系统的统称。
C4ISR系统在国防体系中的功能是:通过侦察系统和预警监视系统获取信息,经过融合之后作为情报通过传输线路传送给指挥司令部,指挥部做出决策命令后再通过传输线路下达到武器系统,由武器系统在命令的指挥控制下实施对敌作战。
C4ISR系统的概念是从传统的C3I系统概念演变而来的。
以美国为代表的C4ISR系统建设,经历了C2—C3—CIFTW—IC4I—C4ISR的发展过程,近年来正在进入调整、改进、提高、综合一体化C4ISR的阶段。
一体化的C4ISR系统是一个集战场感知、信息融合、智能识别、信息处理、武器控制等核心技术于一体的综合电子信息系统。
机电一体化技术试题及其答案

《机电一体化技术》试卷(一)一、名词解释(每小题2分,共10分)1. 测量:是人们借助于专门的设备,通过一定的方法对被测对象收集信息,取得数据概念的过程。
2.灵敏度:指在稳态下,输出的变化量ΔY与输入的变化量ΔX的比值。
即为传感器灵敏度。
S=dy/dx=ΔY/ΔX3. 压电效应:某些电介质,当沿着一定的方向对它施加力而使它产生变形时,内部就会产生极化现象,同时在它的两个表面上将产生符号相反的电荷。
当外力去掉后,它又重新恢复到不带电的状态,这种现象被称为压电效应。
4. 动态误差:动态误差在被测量随时间变化过程中进行测量时所产生的附加误差称为动态误差。
5. 传感器:传感器是一种以一定的精确度把被测量转换为与之有确定对应关系的,便于应用的某种物理量的测量装置。
二、填空题(每小题2分,共20分)1. 滚珠丝杆中滚珠的循环方式:____内循环____,_____外循环____。
2. 机电一体化系统,设计指标和评价标准应包括____性能指标系统功能使用条件经济效益。
3. 顺序控制系统是按照预先规定的次序完成一系列操作的系统,【顺序控制器通常用___________ PLC __________________。
4. 某光栅的条纹密度是50条/mm,光栅条纹间的夹角θ=孤度,则莫尔条纹的宽度是_______20mm ___________。
5. 连续路径控制类中为了控制工具沿任意直线或曲线运动,必须同时控制每一个轴的_______位置和速度________,使它们同步协调到达目标点。
6. 某4极交流感应电机,电源频率为50Hz,转速为1470r/min,则转差率为___。
7. 齿轮传动的总等效惯量与传动级数_____________增加而减小_________________。
8. 累计式定时器工作时有_______________________ 2 ___________________________。
采油井场工况监控系统-四化
5、维护保养
①必须按规定定期标定(规定每6个月标定一次),并做好标定记录和检定合格资料。
②根据维保计划定期维护,清理油污,紧固锁销,紧固各插销螺栓(建议每3月一次)。 ③校正传感器的安装位置,保证受力均衡。 ④根据工作时间累积和系统提示电池电压,更换电池(维修人员)。
⑤油井作业时,派专人拆卸、清洗传感器,登记、封装收存,专井专用,不能互换。
⑥检查、紧固挂在悬绳上的保险螺栓。为防止悬绳器偏载挤飞伤人。
主讲:王克华
四、光杆冲程检测(游梁抽油机)
1、死点位置发送器
用于测量抽油机游梁-光杆下死点位置,并根
据光杆一个冲程周期 T 间接测量光杆位移。 位置信号发送器一般采用非接触接近开关及信 号发射电路实现有线、无线位置的测量。 常用接近开关为霍尔开关。
输出在4~20mA范围内即可认为正常。
⑤ 设置(无线式):用专用手操器组态、设置传感器井号 ID、冲程、下死点、通讯等。 ⑥注意所有连接部位的防潮、防锈,保证连接可靠、拆装方便。
主讲:王克华
五、远程测控终端 RTU
1、组成 RTU由主控模块、配套开关电源、接线端子 、外置通讯接收天线等组成。 电量数据采集器与RTU并排放置。安装在抽 油机变频控制柜内。控制柜可起到防雨、防 晒、防尘作用。
地面功图转化成井下泵功图、找
出泵柱塞有效冲程 Se 求日产量。
Qt = 1440
p 2 Dp SN 4
Se
Q ——日产液量,m3/d; DP——泵径,mm; N ——冲次r/min; Se——柱塞有效冲程。 K ——产量校准系数。
主讲:王克华
二、功图检测过程(游梁抽油机)
位移传感器:将光杆位移转换为 数字信号发送给RTU。 死点位置发送器:光杆经过下死 点位置时接通,给负荷传感器一 开始信号,用来判断起始点位置 ,并测量冲程周期T(用于计算 T/200时间间隔所对应的位移。 负荷传感器:从下死点开始每隔 T/200秒采集一次光杆负荷,通过 无线通讯发送数据给RTU 远程测控单元(RTU):接收存储光杆 载荷、位移数据,并通过有线/无线网 络上传到指挥中心功图服务器上。 电参数采集器:连续采集电机电 压电流,计算功率电能。通过串 口RS232通讯发送数据给RTU。