4.4.Using DMA for Shared Memory in an Image Filter on the Virtex4 FX Platform
xinlinx-Spartan6开发板原理图详解
SP601 Hardware User GuideUG518 (v1.7) September 26, 2012© Copyright 2009–2012 Xilinx, Inc. Xilinx, the Xilinx logo, Artix, ISE, Kintex, Spartan, Virtex, Zynq, and other designated brands included herein are trademarks of Xilinx in the United States and other countries. All other trademarks are the property of their respective owners. DISCLAIMERThe information disclosed to you hereunder (the “Materials”) is provided solely for the selection and use of Xilinx products. To the maximum extent permitted by applicable law: (1) Materials are made available “AS IS” and with all faults, Xilinx hereby DISCLAIMS ALL WARRANTIES AND CONDITIONS, EXPRESS, IMPLIED, OR ST ATUTORY, INCLUDING BUT NOT LIMITED TO WARRANTIES OF MERCHANTABILITY, NON-INFRINGEMENT, OR FITNESS FOR ANY PARTICULAR PURPOSE; and (2) Xilinx shall not be liable (whether in contract or tort, including negligence, or under any other theory of liability) for any loss or damage of any kind or nature related to, arising under, or in connection with, the Materials (including your use of the Materials), including for any direct, indirect, special, incidental, or consequential loss or damage (including loss of data, profits, goodwill, or any type of loss or damage suffered as a result of any action brought by a third party) even if such damage or loss was reasonably foreseeable or Xilinx had been advised of the possibility of the same. Xilinx assumes no obligation to correct any errors contained in the Materials, or to advise you of any corrections or update. Y ou may not reproduce, modify, distribute, or publicly display the Materials without prior written consent. Certain products are subject to the terms and conditions of the Limited Warranties which can be viewed at /warranty.htm; IP cores may be subject to warranty and support terms contained in a license issued to you by Xilinx. Xilinx products are not designed or intended to be fail-safe or for use in any application requiring fail-safe performance; you assume sole risk and liability for use of Xilinx products in Critical Applications:/warranty.htm#critapps.Revision HistoryThe following table shows the revision history for this document.Date Version Revision07/15/09 1.0Initial Xilinx release.08/19/09 1.1•Added Appendix B, VITA 57.1 FMC LPC Connector Pinout.•Updated Figure1-17.•Updated Table1-4, Table1-19, and Table1-22.•Added introductory paragraph to Appendix C, SP601 Master UCF.•Miscellaneous typographical edits and new user guide template.05/17/10 1.2•Updated Figure1-1, Figure1-2, Figure1-14, Figure1-18, Table1-9, Table1-1,Table1-11, and Table1-16.•Added Figure1-7, Figure1-8, and Table1-13.•Updated 9. VITA 57.1 FMC-LPC Connector, page25, Appendix B, VITA 57.1 FMCLPC Connector Pinout, and Appendix C, SP601 Master UCF.06/16/10 1.3Reversed order of 15. Configuration Options and 16. Power Management. Updated 1.Spartan-6 XC6SLX16-2CSG324 FPGA and 2. 128 MB DDR2 Component Memory. AddedTable1-26. Added UG394, Spartan-6 FPGA Power Management User Guide to Appendix D,References.09/24/10 1.4Added Power System Test Points, including Table1-25.02/16/11 1.5Added note and revised header description to indicate the I/Os support LVCMOS25signaling on page34. Revised oscillator manufacturer information from Epson to SiTimeon page page23 and page51.07/18/11 1.6Corrected wording from “PPM frequency jitter” to “PPM frequency stability” in sectionOscillator (Differential), page23. Added Table1-15, page27.09/26/12 1.7Added Regulatory and Compliance Information, page53.SP601 Hardware User Guide UG518 (v1.7) September 26, 2012SP601 Hardware User Guide 3UG518 (v1.7) September 26, 2012Revision History . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Preface: About This GuideGuide Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Additional Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Additional Support Resources . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6Chapter 1: SP601 Evaluation BoardOverview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Additional Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Related Xilinx Documents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Detailed Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101. Spartan-6 XC6SLX16-2CSG324 FPGA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11I/O Voltage Rails . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122. 128 MB DDR2 Component Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123. SPI x4 Flash . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154. Linear Flash BPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175. 10/100/1000 Tri-Speed Ethernet PHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196. USB-to-UART Bridge. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217. IIC Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228-Kb NV Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228. Clock Generation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Oscillator (Differential). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Oscillator Socket (Single-Ended, 2.5V or 3.3V) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24SMA Connectors (Differential). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249. VITA 57.1 FMC-LPC Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2510. Status LEDs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2811. FPGA Awake LED and Suspend Jumper. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2912. FPGA INIT and DONE LEDs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3013. User I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3114. FPGA_PROG_B Pushbutton Switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3515. Configuration Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36JTAG Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3616. Power Management. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37AC Adapter and 5V Input Power Jack/Switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Onboard Power Supplies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Power System Test Points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Table of ContentsAppendix A: Default Jumper and Switch SettingsAppendix B: VITA 57.1 FMC LPC Connector PinoutAppendix C: SP601 Master UCFAppendix D: ReferencesAppendix E: Regulatory and Compliance InformationDirectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Standards. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Electromagnetic Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Markings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 SP601 Hardware User GuideUG518 (v1.7) September 26, 2012SP601 Hardware User Guide 5UG518 (v1.7) September 26, 2012PrefaceAbout This GuideThis manual accompanies the Spartan®-6 FPGA SP601 Evaluation Board and contains information about the SP601 hardware and software tools.Guide ContentsThis manual contains the following chapters:•Chapter 1, SP601 Evaluation Board , provides an overview of the SP601 evaluation board and details the components and features of the SP601 board.•Appendix A, Default Jumper and Switch Settings .•Appendix B, VITA 57.1 FMC LPC Connector Pinout .•Appendix C, SP601 Master UCF .•Appendix D, References .Additional DocumentationThe following documents are available for download at /products/spartan6.•Spartan-6 Family OverviewThis overview outlines the features and product selection of the Spartan-6 family.•Spartan-6 FPGA Data Sheet: DC and Switching CharacteristicsThis data sheet contains the DC and switching characteristic specifications for the Spartan-6 family.•Spartan-6 FPGA Packaging and Pinout SpecificationsThis specification includes the tables for device/package combinations and maximum I/Os, pin definitions, pinout tables, pinout diagrams, mechanical drawings, and thermal specifications.•Spartan-6 FPGA Configuration User GuideThis all-encompassing configuration guide includes chapters on configuration interfaces (serial and parallel), multi-bitstream management, bitstream encryption, boundary-scan and JTAG configuration, and reconfiguration techniques.•Spartan-6 FPGA SelectIO Resources User GuideThis guide describes the SelectIO™ resources available in all Spartan-6 devices.•Spartan-6 FPG A Clocking Resources User GuidePreface:About This GuideThis guide describes the clocking resources available in all Spartan-6 devices,including the DCMs and PLLs.•Spartan-6 FPGA Block RAM Resources User GuideThis guide describes the Spartan-6 device block RAM capabilities.•Spartan-6 FPGA DSP48A1 Slice User GuideThis guide describes the architecture of the DSP48A1 slice in Spartan-6FPGAs andprovides configuration examples.•Spartan-6 FPGA Memory Controller User GuideThis guide describes the Spartan-6 FPGA memory controller block, a dedicatedembedded multi-port memory controller that greatly simplifies interfacingSpartan-6FPGAs to the most popular memory standards.•Spartan-6 FPGA PCB Designer’s GuideThis guide provides information on PCB design for Spartan-6 devices, with a focus onstrategies for making design decisions at the PCB and interface level.Additional Support ResourcesTo search the database of silicon and software questions and answers or to create atechnical support case in WebCase, see the Xilinx website at:/support. SP601 Hardware User GuideUG518 (v1.7) September 26, 2012Chapter1 SP601 Evaluation BoardOverviewThe SP601 board enables hardware and software developers to create or evaluate designstargeting the Spartan®-6 XC6SLX16-2CSG324 FPGA.The SP601 provides board features for evaluating the Spartan-6 family that are common tomost entry-level development environments. Some commonly used features include aDDR2 memory controller, a parallel linear flash, a tri-mode Ethernet PHY, general-purposeI/O (GPIO), and a UART. Additional functionality can be added through the VITA 57.1.1expansion connector. Features, page8 provides a general listing of the board features withdetails provided in Detailed Description, page10.Additional InformationAdditional information and support material is located at:•/sp601This information includes:•Current version of this user guide in PDF format•Example design files for demonstration of Spartan-6 FPGA features and technology•Demonstration hardware and software configuration files for the SP601 linear and SPImemory devices•Reference Design Files•Schematics in PDF format and DxDesigner schematic format•Bill of materials (BOM)•Printed-circuit board (PCB) layout in Allegro PCB format•Gerber files for the PCB (Many free or shareware Gerber file viewers are available onthe internet for viewing and printing these files.)•Additional documentation, errata, frequently asked questions, and the latest newsFor information about the Spartan-6 family of FPGA devices, including product highlights,data sheets, user guides, and application notes, see the Spartan-6 FPGA website at/support/documentation/spartan-6.htm.SP601 Hardware User Guide 7 UG518 (v1.7) September 26, 2012Chapter 1:SP601 Evaluation BoardFeaturesThe SP601 board provides the following features (see Figure1-2 and Table1-1):• 1. Spartan-6 XC6SLX16-2CSG324 FPGA• 2. 128 MB DDR2 Component Memory• 3. SPI x4 Flash• 4. Linear Flash BPI• 5. 10/100/1000 Tri-Speed Ethernet PHY•7. IIC Bus•8Kb NV memory•External access 2-pin header•VITA 57.1 FMC-LPC connector•8. Clock Generation•Oscillator (Differential)•Oscillator Socket (Single-Ended, 2.5V or 3.3V)•SMA Connectors (Differential)•9. VITA 57.1 FMC-LPC Connector•10. Status LEDs•FPGA_AWAKE•INIT•DONE•13. User I/O•User LEDs•User DIP switch•User pushbuttons•GPIO male pin header•14. FPGA_PROG_B Pushbutton Switch•15. Configuration Options• 3. SPI x4 Flash (both onboard and off-board)• 4. Linear Flash BPI•JTAG Configuration•16. Power Management•AC Adapter and 5V Input Power Jack/Switch•Onboard Power Supplies SP601 Hardware User GuideUG518 (v1.7) September 26, 2012Related Xilinx DocumentsBlock DiagramFigure1-1 shows a high-level block diagram of the SP601 and its peripherals.Figure 1-1:SP601 Features and BankingRelated Xilinx DocumentsPrior to using the SP601 Evaluation Board, users should be familiar with Xilinx resources.See the following locations for additional documentation on Xilinx tools and solutions:•ISE: /ise•Answer Browser: /support•Intellectual Property: /ipcenterSP601 Hardware User Guide 9 UG518 (v1.7) September 26, 2012SP601 Hardware User GuideUG518 (v1.7) September 26, 2012Chapter 1:SP601 Evaluation BoardDetailed DescriptionFigure 1-2 shows a board photo with numbered features corresponding to Table 1-1 and the section headings in this document.The numbered features in Figure 1-2 correlate to the features and notes listed in Table 1-1.Figure 1-2:SP601 Board PhotoUG518_02_09100912843126137115109141581316Table 1-1:SP601 FeaturesNumberFeatureNotesSchematic Page1 Spartan-6 FP G A XC6SLX16-2CS G 3242DDR2 Component Elpida EDE1116ACBG 1Gb DDR2SDRAM53SPI x4 Flash and Headers SPI select and External Headers 84Linear Flash BPIStrataFlash 8-bit (J3 device), 3 pins shared w/ SPI x481. Spartan-6 XC6SLX16-2CSG 324 FPGAA Xilinx Spartan-6 XC6SLX16-2CSG324 FPGA is installed on the SP601 Evaluation Board.ReferencesSee the Spartan-6 FPGA Data Sheet . [Ref 1]ConfigurationThe SP601 supports configuration in the following modes:•Master SPI x4•Master SPI x4 with off-board device •BPI•JTAG (using the included USB-A to Mini-B cable)For details on configuring the FPGA, see 15. Configuration Options .The Mode DIP switch SW2 is set to M[1:0] = 01 Master SPI default.ReferencesSee the Spartan-6 FPGA Configuration User Guide for more information. [Ref 2]510/100/1000 Ethernet PHY GMII Marvell Alaska PHY76RS232 UART (USB Bridge)Uses CP2103 Serial-to-USB connection 107IICGoes to Header and VITA 57.1 FMC 108Clock, socket, SMA Differential, Single-Ended, Differential 99VITA 57.1 FMC-LPC connector LVDS signals, clocks, PRSNT 610LEDs Ethernet PHY Status711LED, Header FPGA Awake LED, Suspend Header 812LEDs FPGA INIT, DONE 913LED User I/O (active-High)9DIP SwitchUser I/O (active-High)9PushbuttonUser I/O, CPU_RESET (active-High)912-pin (8 I/O) Header6 pins x 2 male header with 8 I/Os (active-High)1014Pushbutton FPGA_PROG_B915USB JTAG Cypress USB to JTAG download cable logic14, 1516Onboard PowerPower Management11,12,13Table 1-1:SP601 Features (Cont’d)NumberFeatureNotesSchematic PageSP601 Hardware User Guide I/O Voltage RailsThere are four available banks on the LX16-CSG324 device. Banks 0, 1, and 2 are connected for 2.5V I/O. Bank 3 is used for the 1.8V DDR2 component memory interface of Spartan-6 FPGA’s hard memory controller. The voltage applied to the FPGA I/O banks used by the SP601 board is summarized in Table 1-2.ReferencesSee the Spartan-6 FPGA documentation for more information at /support/documentation/spartan-6.htm .2. 128 MB DDR2 Component MemoryThere are 128MB of DDR2 memory available on the SP601 board. A 1-Gb ElpidaEDE1116ACBG (84-ball) DDR2 memory component is accessible through Bank 3 of the LX16 device. The Spartan-6 FPGA hard memory controller is used for data transfer across the DDR2 memory interface’s 16-bit data path using SSTL18 signaling. The SP601 board supports the “standard” VCCINT setting of 1.20V ± 5%. This setting provides the standard memory controller block (MCB) performance of 625Mb/s for DDR2 memory in a -2 speed grade device. Signal integrity is maintained through DDR2 resistor terminations and memory on-die terminations (ODT), as shown in Table 1-3 and Table 1-4.Table 1-2:I/O Voltage Rail of FPGA BanksFPGA BankI/O Voltage Rail0 2.5V 1 2.5V 2 2.5V 31.8VTable 1-3:Termination Resistor RequirementsSignal NameBoard TerminationOn-Die TerminationDDR2_A[14:0]49.9Ω to V TT DDR2_BA[2:0]49.9Ω to V TT DDR2_RAS_N 49.9Ω to V TT DDR2_CAS_N 49.9Ω to V TT DDR2_WE_N 49.9Ω to V TT DDR2_CS_N 100Ω to GND DDR2_CKE 4.7K Ω to GND DDR2_ODT 4.7K Ω to GNDDDR2_DQ[15:0]ODT DDR2_UDQS[P ,N], DDR2_LDQS[P ,N]ODT DDR2_UDM, DDR2_LDMODTTable 1-5 shows the connections and pin numbers for the DDR2 Component Memory.DDR2_CK[P ,N]100Ω differential at memorycomponentNotes:1.Nominal value of V TT for DDR2 interface is 0.9V .Table 1-4:FPGA On-Chip (OCT) Termination External Resistor Requirements FPGA U1 PinFPGA Pin NumberBoard Connection for OCTZIO L6No Connect RZQC2100Ω to GROUNDTable 1-5:DDR2 Component Memory ConnectionsFPGA U1 PinSchematic Net Name Memory U2Pin NumberPin NameJ7DDR2_A0M8A0J6DDR2_A1M3A1H5DDR2_A2M7A2L7DDR2_A3N2A3F3DDR2_A4N8A4H4DDR2_A5N3A5H3DDR2_A6N7A6H6DDR2_A7P2A7D2DDR2_A8P8A8D1DDR2_A9P3A9F4DDR2_A10M2A10D3DDR2_A11P7A11G6DDR2_A12R2A12L2DDR2_DQ0G8DQ0L1DDR2_DQ1G2DQ1K2DDR2_DQ2H7DQ2K1DDR2_DQ3H3DQ3H2DDR2_DQ4H1DQ4H1DDR2_DQ5H9DQ5J3DDR2_DQ6F1DQ6Table 1-3:Termination Resistor Requirements (Cont’d)Signal NameBoard Termination On-Die TerminationSP601 Hardware User Guide ReferencesSee the Elpida DDR2 SDRAM Specifications for more information. [Ref 11]Also, see the Spartan-6 FPGA Memory Controller User Guide . [Ref 3]J1DDR2_DQ7F9DQ7M3DDR2_DQ8C8DQ8M1DDR2_DQ9C2DQ9N2DDR2_DQ10D7DQ10N1DDR2_DQ11D3DQ11T2DDR2_DQ12D1DQ12T1DDR2_DQ13D9DQ13U2DDR2_DQ14B1DQ14U1DDR2_DQ15B9DQ15F2DDR2_BA0L2BA0F1DDR2_BA1L3BA1E1DDR2_BA2L1BA2E3DDR2_WE_B K3WE L5DDR2_RAS_B K7RAS K5DDR2_CAS_B L7CAS K6DDR2_ODT K9ODT G3DDR2_CLK_P J8CK G1DDR2_CLK_N K8CK H7DDR2_CKE K2CKE L4DDR2_LDQS_P F7LDQS L3DDR2_LDQS_N E8LDQS P2DDR2_UDQS_P B7UDQS P1DDR2_UDQS_N A8UDQS K3DDR2_LDM F3LDM K4DDR2_UDMB3UDMTable 1-5:DDR2 Component Memory Connections (Cont’d)FPGA U1 PinSchematic Net Name Memory U2Pin NumberPin Name3. SPI x4 FlashThe Xilinx Spartan-6 FPGA hosts a SPI interface which is accessible to the Xilinx iMPACTconfiguration tool. The SPI memory device operates at 3.0V; the Spartan-6 FPGA I/Os are3.3V tolerant and provide electrically compatible logic levels to directly access the SPI flashthrough a 2.5V bank. The XC6SLX16-2CSG324 is a master device when accessing anexternal SPI flash memory device.The SP601 SPI interface has two parallel connected configuration options (see Figure1-4):an SPI X4 (Winbond W25Q64VSFIG) 64-Mb flash memory device and a flashprogramming header (J12). J12 supports a user-defined SPI mezzanine board. The SPIconfiguration source is selected via SPI select jumper J15. For details on configuring theFPGA, see 15. Configuration Options.Figure 1-3:J12 SPI Flash Programming HeaderSP601 Hardware User Guide ReferencesSee the Winbond Serial Flash Memory Data Sheet for more information. [Ref 12]See the XPS Serial Peripheral Interface Data Sheet for more information. [Ref 4]Figure 1-4:SPI Flash Interface TopologyTable 1-6:SPI x4 Memory ConnectionsFPGA U1 PinSchematic Net Name SPI MEM U17SPI HDR J12Pin #Pin NamePinNumberPin NameV2FPGA_PROG_B 1V14FPGA_D2_MISO31IO3_HOLD_B 2T14FPGA_D1_MISO2_R 9IO2_WP_B3V3SPI_CS_B4TMS T13FPGA_MOSI_CSI_B_MISO015DIN 5TDI R13FPGA_D0_DIN_MISO_MISO18IO1_DOUT6TDO R15FPGA_CCLK16CLK7TCK 8GND 9VCC3V3J15.2SPIX4_CS_B 7CS_B4. Linear Flash BPIAn 8-bit (16MB) Numonyx linear flash memory (TE28F128J3D-75) (J3D type) is used toprovide non-volatile bitstream, code, and data storage. The J3D devices operate at 3.0V; theSpartan-6 FPGA I/Os are 3.3V tolerant and provide electrically compatible logic levels todirectly access the linear flash BPI through a 2.5V bank. For details on configuring theFPGA, see 15. Configuration Options.Figure 1-5:Linear Flash BPI InterfaceTable 1-7:BPI Memory ConnectionsFPGA U1 Pin Schematic Net Name BPI Memory U10Pin Number Pin Name K18FLASH_A032A0K17FLASH_A128A1J18FLASH_A227A2J16FLASH_A326A3G18FLASH_A425A4G16FLASH_A524A5H16FLASH_A623A6H15FLASH_A722A7H14FLASH_A820A8H13FLASH_A919A9F18FLASH_A1018A10F17FLASH_A1117A11K13FLASH_A1213A12K12FLASH_A1312A13E18FLASH_A1411A14E16FLASH_A1510A15G13FLASH_A168A16SP601 Hardware User Guide Note:Memory U10 pin 56 address A24 is not connected on the 16 MB device. It is made availablefor larger density devices.ReferencesSee the Numonyx Embedded Flash Memory Data Sheet for more information. [Ref 13]In addition, see the Spartan-6 FPGA Configuration User Guide for more information. [Ref 2]H12FLASH_A177A17D18FLASH_A186A18D17FLASH_A195A19G14FLASH_A204A20F14FLASH_A213A21C18FLASH_A221A22C17FLASH_A2330A23F16FLASH_A2456A24R13FPGA_D0_DIN_MISO_MISO133DQ0T14FPGA_D1_MISO235DQ1V14FPGA_D2_MISO338DQ2U5FLASH_D340DQ3V5FLASH_D444DQ4R3FLASH_D546DQ5T3FLASH_D649DQ6R5FLASH_D751DQ7M16FLASH_WE_B 55WE_B L18FLASH_OE_B 54OE_B L17FLASH_CE_B14CE0B3FMC_PWR_GOOD_FLASH_RST_B16RP_BTable 1-7:BPI Memory Connections (Cont’d)FPGA U1 PinSchematic Net NameBPI Memory U10Pin NumberPin Name5. 10/100/1000 T ri-Speed Ethernet PHYThe SP601 uses the onboard Marvell Alaska PHY device (88E1111) for Ethernetcommunications at 10, 100, or 1000 Mb/s. The board supports a GMII/MII interface fromthe FPGA to the PHY. The PHY connection to a user-provided Ethernet cable is through aHalo HFJ11-1G01E RJ-45 connector with built-in magnetics.On power-up, or on reset, the PHY is configured to operate in GMII mode with PHYaddress 0b00111 using the settings shown in Table1-8. These settings can be overwrittenvia software commands passed over the MDIO interface.Table 1-8:PHY Configuration PinsPin Connection onBoardBit[2]Definition and ValueBit[1]Definition and ValueBit[0]Definition and ValueCFG0V CC 2.5V PHYADR[2] = 1PHYADR[1] = 1PHYADR[0] = 1 CFG1Ground ENA_PAUSE = 0PHYADR[4] = 0PHYADR[3] = 0 CFG2V CC 2.5V ANEG[3] = 1ANEG[2] = 1ANEG[1] = 1 CFG3V CC 2.5V ANEG[0] = 1ENA_XC = 1DIS_125 = 1 CFG4V CC 2.5V HWCFG_MD[2] = 1HWCFG_MD[1] = 1HWCFG_MD[0] = 1 CFG5V CC 2.5V DIS_FC = 1DIS_SLEEP = 1HWCFG_MD[3] = 1 CFG6PHY_LED_RX SEL_BDT = 0INT_POL = 175/50Ω = 0 Table 1-9:Ethernet PHY ConnectionsFPGA U1 Pin Schematic Net NameU3 M88E111Pin Number Pin NameP16PHY_MDIO33MDIO N14PHY_MDC35MDC J13PHY_INT32INT_B L13PHY_RESET36RESET_B M13PHY_CRS115CRS L14PHY_COL114COL L16PHY_RXCLK7RXCLK P17PHY_RXER8RXER N18PHY_RXCTL_RXDV4RXDV M14PHY_RXD03RXD0 U18PHY_RXD1128RXD1 U17PHY_RXD2126RXD2 T18PHY_RXD3125RXD3 T17PHY_RXD4124RXD4 N16PHY_RXD5123RXD5SP601 Hardware User GuideReferencesSee the Marvell Alaska Gigabit Ethernet Transceivers product page for more information.[Ref 16]Also, see the LogiCORE™ IP Tri-Mode Ethernet MAC User Guide . [Ref 5]N15PHY_RXD6121RXD6P18PHY_RXD7120RXD7A9 PHY_TXC_G TPCLK 14G TXCLKB9 PHY_TXCLK 10TXCLK A8 PHY_TXER 13TXER B8 PHY_TXCTL_TXEN 16TXEN F8 PHY_TXD018TXD0G 8 PHY_TXD119TXD1A6 PHY_TXD220TXD2B6 PHY_TXD324TXD3E6 PHY_TXD425TXD4F7 PHY_TXD526TXD5A5 PHY_TXD628TXD6C5 PHY_TXD729TXD7Table 1-9:Ethernet PHY Connections (Cont’d)FPGA U1 PinSchematic Net NameU3 M88E111Pin NumberPin Name6. USB-to-UART BridgeThe SP601 contains a Silicon Labs CP2103GM USB-to-UART bridge device (U4) which allows connection to a host computer with a USB cable. The USB cable is supplied in this evaluation kit (Type A end to host computer, Type Mini-B end to SP601 connector J9). Table 1-10 details the SP601 J9 pinout.Xilinx UART IP is expected to be implemented in the FPGA fabric. The FPGA supports the USB-to-UART bridge using four signal pins, transmit (TX), receive (RX), Request to Send (RTS), and Clear to Send (CTS).Silicon Labs provides royalty-free Virtual COM Port (VCP) drivers which permit the CP2103GM USB-to-UART bridge to appear as a COM port to host computercommunications application software (for example, HyperTerm or TeraTerm). The VCP device driver must be installed on the host PC prior to establishing communications with the SP601. Refer to the SP601 Getting Started Guide for driver installation instructions.ReferencesRefer to the Silicon Labs website for technical information on the CP2103GM and the VCP drivers.In addition, see some of the Xilinx UART IP specifications at:•/support/documentation/ip_documentation/xps_uartlite.pdf •/support/documentation/ip_documentation/xps_uart16550.pdfTable 1-10:USB Type B Pin Assignments and Signal DefinitionsUSB ConnectorPinSignal NameDescription1VBUS +5V from host system (not used)2USB_DATA_N Bidirectional differential serial data (N-side)3USB_DATA_P Bidirectional differential serial data (P-side)4GROUNDSignal groundTable 1-11:CP2103GM ConnectionsFPGA U1 PinUART Functionin FPGA Schematic Net Name U4 CP2103GMPinUART Function in CP2103GM U10RTS, output USB_1_CTS 22CTS, input T5CTS, input USB_1_RTS 23RTS, output L12TX, data out USB_1_RX 24RXD, data in K14RX, data inUSB_1_TX25TXD, data out。
C28x_CLAmath_v200_Quickstart

C28x Control Law AcceleratorMath Library(CLAmath)Module User’s Guide (SPRC993)C28x Foundation SoftwareV2.00December 11, 2009IMPORTANT NOTICETexas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue any product or service without notice, and advise customers to obtain the latest version of relevant information to verify, before placing orders, that information being relied on is current and complete. All products are sold subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those pertaining to warranty, patent infringement, and limitation of liability.TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily performed, except those mandated by government requirements.Customers are responsible for their applications using TI components.In order to minimize risks associated with the customer’s applications, adequate design and operating safeguards must be provided by the customer to minimize inherent or procedural hazards.TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right of TI covering or relating to any combination, machine, or process in which such products or services might be or are used. TI’s publication of information regarding any third party’s products or services does not constitute TI’s approval, license, warranty or endorsement thereof.Reproduction of information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties, conditions, limitations and notices. Representation or reproduction of this information with alteration voids all warranties provided for an associated TI product or service, is an unfair and deceptive business practice, and TI is not responsible or liable for any such use.Resale of TI’s products or services with statements different from or beyond the parameters stated by TI for that products or service voids all express and any implied warranties for the associated TI product or service, is an unfair and deceptive business practice, and TI is not responsible nor liable for any such use.Also see: Standard Terms and Conditions of Sale for Semiconductor Products./sc/docs/stdterms.htmMailing Address:Texas InstrumentsPost Office Box 655303Dallas, Texas 75265Copyright ©2002, Texas Instruments IncorporatedContents1.Introduction_____________________________________________________42.Other Resources________________________________________________43.Installing the Macro Library______________________________________53.1.Where the Files are Located (Directory Structure)_________________5ing the CLAmath Macro Library________________________________64.1.The C28x CPU and the CLA are Friends!__________________________64.2.C28x C Code____________________________________________________74.3.CLA Assembly Code____________________________________________74.4.Math Lookup Tables_____________________________________________84.5.Linker File______________________________________________________85.CLAmath Macro Summary_______________________________________9CLAcos_______________________________________________________________9 CLAdiv________________________________________________________________9 CLAisqrt_____________________________________________________________10 CLAsin_______________________________________________________________10 CLAsincos___________________________________________________________11 CLAsqrt______________________________________________________________11 CLAatan_____________________________________________________________12 CLAatan2____________________________________________________________12 6.Revision History________________________________________________13TrademarksTMS320 is the trademark of Texas Instruments Incorporated.Code Composer Studio is a trademark of Texas Instruments Incorporated.All other trademark mentioned herein is property of their respective companies1. I ntroduction The Texas Instruments TMS320C28x Control Law Accelerator math library is a collection of optimized floating-point math functions for controllers with the CLA. This source code library includes CLA assembly macros of selected floating-point math functions. All source code is provided so it can be modified for your particular requirements.2. O ther Resources There is a live Wiki page for answers to CLA frequently asked questions (FAQ). Links to other CLA references such as training videos will be posted here as well./index.php/Category:Control_Law_Accelerator_Type0Also check out the TI Piccolo page:/piccoloAnd don’t forget the TI community website:/Building CLA code requires Codegen Tools V5.2 or later.Debugging in Code Composer Studio V4:Debugging CLA code requires CCS V4.0.2. V4.02 can be installed by going to the update manager and upgrading your CCS 4.0 install.Debugging in Code Composer Studio V3.3:C2000 evaluation version 3.3.83.19 or later supports CLA debug. For updating other versions of CCS, please check the Wiki and community website for updates.3. I nstalling the Macro Library 3.1. Where the Files are Located (Directory Structure)As installed, the C28x CLAmath Library is partitioned into a well-defined directory structure.By default, the library and source code is installed into the following directory:C:\ti\controlSUITE\libs\math\CLAmathTable 1 describes the contents of the main directories used by library:Table 1. C28x CLAmath Library Directory StructureDirectory Description<base> Base install directory. By default this isC:\ti\controlSUITE\libs\math\CLAmath\v100aFor the rest of this document <base> will be omitted fromthe directory names.<base>\doc Documentation including the revision history from anyprevious release.<base>\lib The macro library include file.The macro library header file.Lookup tables used by the macros (assembly file).<base>\2803x_examples Example code for the 2803x family of devices.<base>\2803x_examples\examples Code Composer Studio V3.3 based examples<base>\2803x_examples\examples_ccsv4 Code Composer Studio V4 based examples4. U sing the CLAmath Macro LibraryThe best place to start is to open up and run some of the example programs provided. This section will walk you through the framework the examples use. Open one of the projects and follow along.4.1. The C28x CPU and the CLA are Friends!Also known as: How to Use Header Files to Make Sharing EasyIn each of the examples provided, you will find a header file called CLAShared.h. This file includes the header files, variables, and constants that we want both the C28x and the CLA code to know about.If possible, open one of these examples and follow along in the CLAShared.h file as we go through some suggested content:•IQmath: If your project uses IQmath, then include it in CLAShared.h. Now you can define variables as _iq and the CLA will also know what your GLOBAL_Q value is.•C28x Header files: These make accessing peripherals easy and can be used in bothC and assembly code. In the header file software downloads we provide a file calledDSP28x_Project.h. This will include all of the peripheral header files along with some example header files with useful definitions.•The CLAmath header file: CLAmath_type0.h. All of the symbols used by the CLAmath library are included in this header file.•Any variables or constants that both the C28x and CLA should know about. For example, if they will both access a variable called X, you can add:extern float32 X;The variable X will be created in the C28x C environment, but now the CLA will alsoknow about it.•Symbols in the CLA assembly file. These might include start/end symbols for each task. The main CPU can then use these symbols to calculate the vector address foreach task.4.2. C28x C CodeNow open the main.c file to see the system setup performed by the C28x main CPU. Notice the C28x C code includes the CLAShared.h header file discussed in the previous section. The C28x C code is responsible for•Declaring all the C28x and CLA shared variables•Assigning these variables to linker sections by using the CODE_SECTION #pragma statement. This will be used by the linker file to place the variables in the propermemory block or message RAM.•Turning on the clock to the CLA•Initializing the CLA data and program memoryNote as the examples are provided, the CLA data and program are loaded directly by Code Composer Studio. This is a great first step while debugging CLA code. Laterif you move the load address of these sections to flash, the main CPU will need tocopy them to the CLA data and program memory.•Assigning the CLA program and data memory to the CLA module. At reset these memories belong to the C28x CPU so they can be initialized like any other memory.After initialization, they can then be assigned to the CLA for use.•Enabling CLA interrupts4.3. CLA Assembly CodeThe CLA assembly code for each example is in the file CLA.asm. Open this file and notice the following:•The CLAShared.h header file discussed previously is included by using the assembly directive:.cdecls C,LIST,"CLAShared.h"•The CLAmath macro library is included as well. This will allow you to create instances of the macros in the CLA assembly file..include "CLAmathLib_type0.inc"•CLA code is assigned to its own assembly section. In this case the section is called CLAProg. Later we will use this section in the linker command file to indicate wherein the memory map the CLA code should be loaded and where it will run.• A symbol indicates the start of CLA program memory and a symbol indicates the start of each task. These can be used by the main CPU to calculate the contents of thevector register (MVECT) for each CLA task.•In one or more of the tasks, a CLA macro is instanced. The input and output of each macro instance are tied to variables you will create in the C28x code and reference in the CLAShared.h header file. A single task can include one or more macros. Themacros themselves do not include the MSTOP instruction. Notice that an “MSTOP”instruction has been inserted to indicate the end of each task..4.4. Math Lookup TablesMany of the functions in the library use look-up tables to increase performance. These tables are located in the “CLAmathTables” assembly section and are available in the file called CLAsincosTable_type0.asm.Make sure to add this file to your project if you are using the sin, cos or sincos macros.4.5. Linker FileThe linker file needs to specify the load and run memory locations for the following sections:•CLAProg – this contains the CLA program code. The examples load this code directly into CLA program memory for debug. Later you will want to load this section into flash and copy it to CLA program SARAM just as you would any time criticalsection of code.•Cla1ToCpuMsgRAM – The examples place all of the CLA to CPU message traffic in this section using the DATA_SECTION #pragma in the main C28x code. This section must be placed in the CLA to CPU message RAM.•CpuToCla1MsgRAM – Likewise, the examples place all of the CPU to CLA message traffic in this section using the DATA_SECTION #pragma in the main C28x code.This section must be placed in the CPU to CLA message RAM.•CLAmathTables – This table is used by the sin, cos and sincos macros. The contents of this section should be placed in the CLA data memory at runtime. The examplesload this code directly into CLA data memory for debug. Later you will want to loadthis section into flash and copy it to CLA data SARAM just as you would any timecritical data table.5. C LAmath Macro SummaryThe following functions are included in this release of the CLAmath Library. All of the macros are provided in the CLAmathLib_type0.inc file and can be modified as required for a particular application.cos isqrtdivision sinatan sincosatan2 sqrtsincosSingle-Precision Floating-Point COS (radians) Description Returns the cosine of a 32-bit floating-point argument “rad” (in radians)using table look-up and Taylor series expansion between the look-uptable entries.Header File C28x C code: #include "CLAmathLib_type0.h"CLA Code: .cdecls C,LIST,"CLAmathLib_type0.h"Macro Declaration CLAcos .macro y, rad ; y = cos(rad)Input: rad = radians in 32-bit floating-pointOutput: y = cos(rad) in 32-bit floating-point Lookup Tables This function requires the CLAsincosTable located in the file calledCLAsincosTable_type0.asm. By default, this table is in the assemblysection named CLAmathTables. Make sure this table is loaded into theCLA data space.Single-Precision Floating-Point Division Description Performs a 32-bit/32-bit = 32-bit single-precision floating point division.This function uses a Newton-Raphson algorithm.Header File NoneMacro Declaration CLAdiv .macro Dest, Num, DenInput: Num = Numerator 32-bit floating-pointDen = Denominator 32-bit floating-pointOutput: Dest= Num/Den in 32-bit floating-point Lookup Tables NoneSingle-Precision Floating-Point 1.0/Square Root Description Returns 1.0 /square root of a floating-point argument using a Newton-Raphson algorithm.Header File NoneMacro Declaration CLAisqrt .macro y, xInput: x = 32-bit floating-point inputOutput: y = 1/(sqrt(x)) in 32-bit floating-point Lookup Tables NoneSpecial Cases If x = FLT_MAX or FLT_MIN, CLAisqrt will set the LUF flag.If x = -FLT_MIN, CLAsqrt will set both the LUF and LVF flags.If x = 0.0, CLAsqrt sets the LVF flag.If x is negative, CLAsqrt will set LVF and return 0.0.Single-Precision Floating-Point SIN (radians) Description Returns the sine of a 32-bit floating-point argument “rad” (in radians)using table look-up and Taylor series expansion between the look-uptable entries.Header File C28x C code: #include "CLAmathLib_type0.h"CLA Code: .cdecls C,LIST,"CLAmathLib_type0.h"Macro Declaration CLAsin .macro y, rad ; y = cos(rad)Input: rad = radians in 32-bit floating-pointOutput: y = cos(rad) in 32-bit floating-point Lookup Tables This function requires the CLAsincosTable located in the file called CLAsincosTable_type0.asm. By default, this table is in the assemblysection named CLAmathTables. Make sure this table is loaded into theCLA data space.Single-Precision Floating-Point SIN and COS (radians) Description Returns the sine and cosine of a 32-bit floating-point argument “rad” (inradians) using table look-up and Taylor series expansion between thelook-up table entries.Header File C28x C code: #include "CLAmathLib_type0.h"CLA Code: .cdecls C,LIST,"CLAmathLib_type0.h"Macro Declaration CLAcos .macro y1, y2, rad, temp1, temp2Input: rad = radians in 32-bit floating-pointOutput: y1 = sin(rad) in 32-bit floating-pointy2 = cos(rad) in 32-bit floating-pointTemporary: temp1, temp2.Note: temp1 and temp2 locations are used for temporarystorage during the function execution.Lookup Tables This function requires the CLAsincosTable located in the file called CLAsincosTable_type0.asm. By default, this table is in the assemblysection named CLAmathTables. Make sure this table is loaded into theCLA data space.Single-Precision Floating-Point Square Root Description Returns the square root of a floating-point argument X using a Newton-Raphson algorithm.Header File NoneMacro Declaration CLAsqrt .macro y, xInput: x = 32-bit floating-point inputOutput: y = sqrt(x) in 32-bit floating-point Lookup Tables NoneSpecial Cases If X = FLT_MAX or FLT_MIN CLAsqrt will set the LUF flag.If X = -FLT_MIN CLAsqrt will set both the LUF and LVF flags.If X = 0.0, CLAsqrt sets the LVF flag.If X is negative, CLAsqrt will set LVF and return 0.0.Single-Precision Floating-Point ATAN (radians)Description Returns the arc tangent of a floating-point argument x . The return valueis an angle in the range [-π, π] radians.Header File C28x C code: #include "CLAmathLib_type0.h"CLA Code: .cdecls C,LIST,"CLAmathLib_type0.h"Macro Declaration CLAatan .macro y,x ; y = atan(x)Input: x in 32-bit floating-pointOutput: y = atan(x) in 32-bit floating-point Lookup Tables This function requires the CLAatan2Table located in the file called CLAatanTable_type0.asm. By default, this table is in the assemblysection named CLAmathTables. Make sure this table is loaded into theCLA data space.Single-Precision Floating-Point ATAN2 (radians)Description Returns the 4-quadrant arctangent of floating-point arguments y/x. Thereturn value is an angle in the range [-π, π] radiansHeader File C28x C code: #include "CLAmathLib_type0.h"CLA Code: .cdecls C,LIST,"CLAmathLib_type0.h"Macro Declaration CLAatan2 .macro z,y,x ; z = atan(y/x)Inputs: x in 32-bit floating-pointy in 32-bit floating-pointOutput: z = atan2(y,x) in 32-bit floating-pointLookup Tables This function requires the CLAatan2Table located in the file called CLAatanTable_type0.asm. By default, this table is in the assemblysection named CLAmathTables. Make sure this table is loaded into theCLA data space.6. R evision History V2.00: Moderate updateTwo more functions , atan and atan2 have been added to the list of available CLA math macros .V1.00a: Minor updateThis update is a minor update that does not change any of the source code. The changes were to prepare the package to be included in ControlSUITE and improve usability in Code Composer Studio V4.•Changed the default location for the ControlSUITE release of this package. The new release location is:C:\ti\controlSUITE\libs\math\CLAmath•Added example projects ported to work with Code Composer Studio V4.CCS 3.3 examples can be found in the directory:C:\ti\controlSUITE\libs\math\CLAmath\v100a\2803x_examples\examplesCCS 4 examples can be found in the directory:C:\ti\controlSUITE\libs\math\CLAmath\v100a\2803x_examples\examples_ccsv4 V1.00: Initial release。
USB3.0超高速接口单片机CH569手册

√
×
超速 USB3.0
√
√
高速 USB2.0
√
√
高速 SerDes
√
√
调试接口
√
√
CH565M
448KB
22 3
2+3 3 1 × × √ × √ × √ √ √ ×
1.3 引脚描述
1.3.1 CH569 引脚定义
表 1-2 CH569 引脚定义
引 脚 号
引脚 名称
类型
ห้องสมุดไป่ตู้
主功能(复位后)/ 复用功能及映射
PB16/MCMD/DD9 PA17
PB17/MD0/DD8 PB18/MD1/DD7 PB19/MD2/DD6 PB20/MD3/DD5 PB21/MD4/DD4 PA0/MD5/BD0/DD3 PA1/MD6/BD1/DD2 PA2/MD7/BD2/DD1/RXD2 PA3/TXD2/BD3/DD0
PA23
34 33 32 31 30 29 28 27 26 25 24 23 22 21 20 19 18
31 PA9/TMR0 32 PA13/SCK 33 V33LDO 34 V12CORE 35 V33GX 36 GXM 37 GXP 38 XO 39 XI 40 UD+
PB17/DD8 20 PB18/DD7 19 PB19/DD6 18 PB20/DD5 17 PB21/DD4 16 PA0/DD3 15 PA1/DD2 14 PA2/DD1/RXD2 13 PA3/TXD2/DD0 12 PA4/TMR2/PWM1/DVSYN 11
l 千兆以太网控制器 ETH - 符合 IEEE 802.3 协议规范 - 提供 RGMII 和 RMII 接口,连接外置的 PHY - 通过 PHY,支持 10/100/1000Mbps 的传输速率 l EMMC 控制器 - 符合 SD3.0 规范的 UHS-ISDR50 模式并向下兼容 - 符合 EMMC 卡 4.4 和 4.5.1 规范,兼容 5.0 规范 - 支持 1/4/8 线数据通讯,最高 96MHz 通讯时钟 l 高速并行接口 HSPI - 8/16/32 位数据宽度可配置 - 内置 FIFO,支持 DMA,双缓冲收发 - 最快传输速度约为 3.8Gbps(32 位@120MHz) l 数字视频接口 DVP - 可配置 8/10/12 位数据宽度 - 支持 YUV、RGB、JPEG 压缩数据 l ECEC 加密模块 - 支持 AES/SM4 算法,8 种组合加解密模式 - 支持 SRAM/EMMC/HSPI 外设接口数据加解密 l 远距离 SerDes 控制器及收发器(内置 PHY) - 8b/10b 编解码,1.2Gbps 高速差分信号通讯 - 通过一对差分网线 600Mbps 传输距离达 90m
LH79520中文资料
LH75401/LH75411 Preliminary data sheet System-on-ChipDESCRIPTIONThe NXP BlueStreak LH75401/LH75411 family con-sists of two low-cost 16/32-bit System-on-Chip (SoC) devices.•LH75401 — contains the superset of features.•LH75411 — similar to LH75401, without CAN 2.0B.COMMON FEATURES•Highly Integrated System-on-Chip•ARM7TDMI-S™ Core•High Performance (84 MHz CPU Speed)–Internal PLL Driven or External Clock Driven–Crystal Oscillator/Internal PLL Can Operate with Input Frequency Range of 14 MHz to 20MHz •32kB On-chip SRAM–16kB Tightly Coupled Memory (TCM) SRAM–16kB Internal SRAM•Clock and Power Management–Low Power Modes: Standby, Sleep, Stop •Eight Channel, 10-bit Analog-to-Digital Converter •Integrated Touch Screen Controller•Serial interfaces–Two 16C550-type UARTs supporting baud rates up to 921,600 baud (requires crystal frequency of14.756 MHz).–One 82510-type UART supporting baud rates up to 3,225,600 baud (requires a system clock of70MHz).•Synchronous Serial Port–Motorola SPI™–National Semiconductor Microwire™–Texas Instruments SSI•Real-Time Clock (RTC)•Three Counter/Timers–Capture/Compare/PWM Compatibility–Watchdog Timer (WDT)•Low-Voltage Detector •JTAG Debug Interface and Boundary Scan •Single 3.3 V Supply• 5 V Tolerant Digital I/O–XTALIN and XTAL32IN inputs are 1.8 V ± 10%•144-pin LQFP Package•−40°C to +85°C Operating TemperatureUnique Features of the LH75401•Color and Grayscale Liquid Crystal Display (LCD) Controller–12-bit (4,096) Direct Mode Color, up to VGA–8-bit (256) Direct or Palettized Color, up to SVGA –4-bit (16) Direct Mode Color/Grayscale, up to XGA –12-bit Video Bus–Supports STN, TF T, HR-TF T, and AD-TF T Displays.•CAN Controller that supports CAN version 2.0B.Unique Features of the LH75411•Color and Grayscale LCD Controller (LCDC)–12-bit (4,096) Direct Mode Color, up to VGA–8-bit (256) Direct or Palettized Color, up to SVGA –4-bit (16) Direct Mode Color/Grayscale, up to XGA –12-bit Video Bus–Supports STN, TF T, HR-TF T, and AD-TF T Displays.元器件交易网Preliminary data sheet 1LH75401/LH75411System-on-Chip2Rev. 01— 16 July 2007Preliminary data sheetNXP SemiconductorsORDERING INFORMATIONTable 1.Ordering informationType number PackageVersionName DescriptionLH75401N0Q100C0LQFP144plastic low profile quad flat package; 144 leads;body 20 x 20 x 1.4 mmSOT486-1LH75411N0Q100C0LQFP144plastic low profile quad flat package; 144 leads;body 20 x 20 x 1.4 mmSOT486-1元器件交易网System-on-ChipLH75401/LH75411Preliminary data sheet Rev. 01 — 16 July 2007 3NXP SemiconductorsLH75401 BLOCK DIAGRAMFigure 1.LH75401 Block Diagram元器件交易网LH75401/LH75411System-on-Chip4Rev. 01— 16 July 2007Preliminary data sheetNXP SemiconductorsLH75411 BLOCK DIAGRAMFigure 2.LH75411 Block Diagram元器件交易网System-on-ChipLH75401/LH75411Preliminary data sheet Rev. 01 — 16 July 2007 5NXP SemiconductorsPIN CONFIGURATIONFigure 3.LH75401/LH75411 pin configuration元器件交易网LH75401/LH75411System-on-Chip6Rev. 01— 16 July 2007Preliminary data sheetNXP SemiconductorsLH75401 Numerical Pin ListingTable 2.LH75401 Numerical Pin ListPIN NO.FUNCTION AT RESETFUNCTION2FUNCTION 3FUNCTION TYPE OUTPUTDRIVEBUFFERTYPE BEHAVIOR DURINGRESETNOTES 1PA7D15I/O 8 mA Bidirectional Pull-up 12PA6D14I/O 8 mA Bidirectional Pull-up 13VDD Power None 4PA5D13I/O 8 mA Bidirectional Pull-up 15PA4D12I/O 8 mA Bidirectional Pull-up 16PA3D11I/O 8 mA Bidirectional Pull-up 17PA2D10I/O 8 mA Bidirectional Pull-up 18VSS Ground None 9PA1D9I/O 8 mA Bidirectional Pull-up 110PA0D8I/O 8 mA Bidirectional Pull-up 111VDDC Power None 12D7I/O 8 mA Bidirectional Pull-up 13D6I/O 8 mA Bidirectional Pull-up 14VSSC Ground None 15D5I/O 8 mA Bidirectional Pull-up 16D4I/O 8 mA Bidirectional Pull-up 17VDD Power None 18D3I/O 8 mA Bidirectional Pull-up 19D2I/O 8 mA Bidirectional Pull-up 20D1I/O 8 mA Bidirectional Pull-up 21D0I/O8 mA Bidirectional Pull-up 22nWE 8 mA Output HIGH 323nOE 8 mA Output HIGH 324PB5nWAIT 8 mA Bidirectional Pull-up 1, 325PB4nBLE18 mA Bidirectional Pull-up 1, 326VSS GroundNone 27PB3nBLE08 mA Bidirectional Pull-up 1, 328PB2nCS38 mA Bidirectional Pull-up 1, 329PB1nCS28 mA Bidirectional Pull-up 1, 330PB0nCS18 mA Bidirectional Pull-up 1, 331nCS08 mA Output Pull-up 332PC7A238 mA Bidirectional Pull-down 133PC6A228 mA BidirectionalPull-down134VDD PowerNone 35PC5A218 mA Bidirectional Pull-down 136PC4A208 mA Bidirectional Pull-down 137PC3A198 mA Bidirectional Pull-down 138PC2A188 mABidirectionalPull-down1元器件交易网System-on-ChipLH75401/LH75411Preliminary data sheet Rev. 01 — 16 July 2007 7NXP Semiconductors39PC1A178 mA Bidirectional Pull-down 140PC0A168 mA BidirectionalPull-down141VSS Ground None 42VDD PowerNone 43A158 mA Output LOW 44A148 mA Output LOW 45A138 mA Output LOW 46A128 mA Output LOW 47A118 mA OutputLOW48VSS GroundNone 49A108 mA Output LOW 50A98 mA Output LOW 51A88 mA Output LOW 52A78 mA Output LOW 53A68 mA OutputLOW54VDD Power None 55A58 mA Output LOW 56A48 mA Output LOW 57A38 mA Output LOW 58A28 mA OutputLOW59VSS Ground None 60A18 mA Output LOW 61A08 mA Output LOW 62nRESETIN None Input Pull-up 2, 363TEST2None Input Pull-up 264TEST1None Input Pull-up 265TMS None Input Pull-up266RTCK 8 mA Output 67TCK None Input 68TDI None Input Pull-up269TDO 4 mA Output 70LINREGEN None Input 571nRESETOUT8 mA Output 372PD6INT6DREQ 6 mA Bidirectional Pull-down173PD5INT5DACK 6 mA Bidirectional 1, 274PD4INT4UARTRX18 mA BidirectionalPull-up 175VDDC Power None 76PD3INT3UARTTX18 mA Bidirectional Pull-up 177PD2INT2 2 mA Bidirectional Pull-up178PD1INT1 6 mA Bidirectional 1, 279PD0INT02 mA Bidirectional180VSSCGroundNoneTable 2.LH75401 Numerical Pin List (Cont’d)PIN NO.FUNCTION AT RESETFUNCTION2FUNCTION 3FUNCTION TYPE OUTPUTDRIVEBUFFERTYPE BEHAVIOR DURINGRESETNOTES 元器件交易网LH75401/LH75411System-on-Chip8Rev. 01— 16 July 2007Preliminary data sheetNXP Semiconductors81nPOR None Input Pull-up2, 382XTAL32IN None Input 483XTAL32OUT None Output84VSSA_PLL Ground None 85VDDA_PLL PowerNone 86XTALIN None Input 487XTALOUT None Output88VSSA_ADC Ground None 89AN3 (LR/Y-)PJ7None Input 90AN4 (Wiper)PJ6None Input 91AN9PJ5None Input 92AN2 (LL/Y+)PJ4None Input 93AN8PJ3None Input 94AN1 (UR/X-)PJ2None Input 95AN6PJ1None Input 96AN0 (UL/X+)PJ0None Input 97VDDA_ADCPower None 98VDD Power None 99PE7SSPFRM 4 mA Bidirectional Pull-up 1100PE6SSPCLK 4 mA Bidirectional Pull-down 1101PE5SSPRX 4 mA Bidirectional Pull-up 1102PE4SSPTX 4 mA Bidirectional Pull-down 1103PE3CANTX UARTTX08 mA Bidirectional Pull-up 1104PE2CANRX UARTRX02 mA Bidirectional Pull-up 1105PE1UARTTX24 mA BidirectionalPull-up1106VSS GroundNone 107PE0UARTRX2 4 mA Bidirectional Pull-up1108PF6CTCAP2B CTCMP2B 4 mA Bidirectional 2109PF5CTCAP2A CTCMP2A 4 mA Bidirectional 110PF4CTCAP1B CACMP1B 4 mA Bidirectional 2111PF3CTCAP1ACTCMP1A4 mA Bidirectional112VDD PowerNone 113PF2CTCAP0E 4 mA Bidirectional 2114PF1CTCAP0D 4 mA Bidirectional 115PF0CTCAP0C 4 mA Bidirectional 2116PG7CTCAP0B CTCMP0B 4 mA Bidirectional 117PG6CTCAP0A CTCMP0A4 mA Bidirectional 2118PG5CTCLK4 mA Bidirectional119VSS GroundNone 120PG4LCDVEEEN LCDMOD8 mA Bidirectional 121PG3LCDVDDEN 8 mA Bidirectional 122PG2LCDDSPLENLCDREV 8 mABidirectional Table 2.LH75401 Numerical Pin List (Cont’d)PIN NO.FUNCTION AT RESET FUNCTION2FUNCTION 3FUNCTION TYPE OUTPUTDRIVEBUFFERTYPE BEHAVIOR DURINGRESETNOTES 元器件交易网System-on-ChipLH75401/LH75411Preliminary data sheet Rev. 01 — 16 July 2007 9NXP SemiconductorsNOTES:1.Signal is selectable as pull-up, pull-down, or no pull-up/pull-down via the I/O Configuration peripheral.2.CMOS Schmitt trigger input.3.Signals preceded with ‘n’ are active LOW.4.Crystal Oscillator Inputs should be driven to 1.8 V ±10% (MAX.)5.LINREGEN activation requires a 0 Ω pull-up to VDD.123PG1LCDCLS 8 mA Bidirectional 124PG0LCDPS 8 mA Bidirectional 125PH7LCDDCLK8 mABidirectional126VDD Power None 127VSS GroundNone 128PH6LCDLP LCDHRLP 8 mA Bidirectional 129PH5LCDFP LCDSPS 8 mA Bidirectional 130PH4LCDEN LCDSPL8 mA Bidirectional 131PH3LCDVD118 mA Bidirectional 132PH2LCDVD108 mA Bidirectional 133PH1LCDVD98 mABidirectional 134VDD PowerNone 135PH0LCDVD88 mA Bidirectional 136PI7LCDVD78 mA Bidirectional 137PI6LCDVD68 mA Bidirectional 138PI5LCDVD58 mA Bidirectional 139PI4LCDVD48 mABidirectional 140VSS GroundNone 141PI3LCDVD38 mA Bidirectional 142PI2LCDVD28 mA Bidirectional 143PI1LCDVD18 mA Bidirectional 144PI0LCDVD08 mABidirectionalTable 2.LH75401 Numerical Pin List (Cont’d)PIN NO.FUNCTION AT RESETFUNCTION2FUNCTION 3FUNCTION TYPE OUTPUTDRIVEBUFFERTYPE BEHAVIOR DURINGRESETNOTESLH75401/LH75411System-on-Chip10Rev. 01 — 16 July 2007Preliminary data sheetNXP SemiconductorsLH75401 Signal DescriptionsTable 3.LH75401 Signal DescriptionsPIN NO.SIGNAL NAMETYPEDESCRIPTIONNOTESMEMORY INTERFACE (MI)1245679101213151618192021D[15:0]Input/Output Data Input/Output Signals 122nWE Output Static Memory Controller Write Enable 223nOE Output Static Memory Controller Output Enable 224nWAIT Input Static Memory Controller External Wait Control 1, 225nBLE1Output Static Memory Controller Byte Lane Strobe 1, 227nBLE0Output Static Memory Controller Byte Lane Strobe 1, 228nCS3Output Static Memory Controller Chip Select 1, 229nCS2Output Static Memory Controller Chip Select 1, 230nCS1Output Static Memory Controller Chip Select 1, 231nCS0OutputStatic Memory Controller Chip Select23233 35363738394043444546474950515253555657586061A[23:0]Output Address Signals 1DMA CONTROLLER (DMAC)72DREQ Input DMA Request 173DACKOutputDMA Acknowledge1PIN NO.SIGNAL NAME TYPE DESCRIPTION NOTESCOLOR LCD CONTROLLER (CLCDC)120LCDMOD Output Signal Used by the Row Driver (AD-TFT, HR-TFT only)1 120LCDVEEEN Output Analog Supply Enable (AC Bias SIgnal)1 121LCDVDDEN Output Digital Supply Enable1 122LCDDSPLEN Output LCD Panel Power Enable1 122LCDREV Output Reverse Signal (AD-TFT, HR-TFT only)1 123LCDCLS Output Clock to the Row Drivers (AD-TFT, HR-TFT only)1 124LCDPS Output Power Save (AD-TFT, HR-TFT only)1 125LCDDCLK Output LCD Panel Clock1 128LCDLP Output Line Synchronization Pulse (STN), Horizontal Synchronization Pulse (TFT)1 128LCDHRLP Output Latch Pulse (AD-TFT, HR-TFT only)1 129LCDFP Output Frame Pulse (STN), Vertical Synchronization Pulse (TFT)1 129LCDSPS Output Row Driver Counter Reset Signal (AD-TFT, HR-TFT only)1 130LCDEN Output LCD Data Enable1 130LCDSPL Output Start Pulse Left (AD-TFT, HR-TFT only)1 131132133135136137LCDVD[11:0]Output LCD Panel Data bus1 138139141142143144SYNCHRONOUS SERIAL PORT (SSP)99SSPFRM Output SSP Serial Frame1 100SSPCLK Output SSP Clock1 101SSPRX Input SSP RXD1 102SSPTX Output SSP TXD1UART0 (U0)103UARTTX0Output UART0 Transmitted Serial Data Output1 104UARTRX0Input UART0 Received Serial Data Input1UART1 (U1)74UARTRX1Input UART1 Received Serial Data Input1 76UARTTX1Output UART1 Transmitted Serial Data Output1UART2 (U2)105UARTTX2Output UART2 Transmitted Serial Data Output1 107UARTRX2Input UART2 Received Serial Data Input1CONTROLLER AREA NETWORK (CAN)103CANTX Output CAN Transmitted Serial Data Output1 104CANRX Input CAN Received Serial Data Input1ANALOG-TO-DIGITAL CONVERTER (ADC)89 90 91 92 93 94 95 96AN3 (LR/Y-)AN4 (Wiper)AN9AN2 (LL/Y+)AN8AN1 (UR/X-)AN6AN0 (UL/X+)Input ADC Inputs1TIMER 0117116115114113CTCAP0[A:E]Input Timer 0 Capture Inputs1117116CTCMP0[A:B]Output Timer 0 Compare Outputs1 118CTCLK Input Common External Clock1TIMER 1111110CTCAP1[A:B]Input Timer 1 Capture Inputs1 111110CTCMP1[A:B]Output Timer 1 Compare Outputs1 118CTCLK Input Common External Clock1TIMER 2109108CTCAP2[A:B]Input Timer 2 Capture Inputs1 109108CTCMP2[A:B]Input Timer 2 Compare Outputs1 118CTCLK Input Common External Clock1GENERAL PURPOSE INPUT/OUTPUT (GPIO)1 2 4 5 6 7 9 10PA7PA6PA5PA4PA3PA2PA1PA0Input/Output General Purpose I/O Signals - Port A124 25 27 28 29 30PB5PB4PB3PB2PB1PB0Input/Output General Purpose I/O Signals - Port B132 33 35 36 37 38 39 40PC7PC6PC5PC4PC3PC2PC1PC0Input/Output General Purpose I/O Signals - Port C1PIN NO.SIGNAL NAME TYPE DESCRIPTION NOTES72 73 74 76 77 78 79PD6PD5PD4PD3PD2PD1PD0Input/Output General Purpose I/O Signals - Port D189 90 91 92 93 94 95 96PJ7PJ6PJ5PJ4PJ3PJ2PJ1PJ0Input General Purpose I/O Signals - Port J199 100 101 102 103 104 105 107PE7PE6PE5PE4PE3PE2PE1PE0Input/Output General Purpose I/O Signals - Port E1108 109 110 111 113 114 115PF6PF5PF4PF3PF2PF1PF0Input/Output General Purpose I/O Signals - Port F1116 117 118 120 121 122 123 124PG7PG6PG5PG4PG3PG2PG1PG0Input/Output General Purpose I/O Signals - Port G1125 128 129 130 131 132 133 135PH7PH6PH5PH4PH3PH2PH1PH0Input/Output General Purpose I/O Signals - Port H1136 137 138 139 141 142 143 144PI7PI6PI5PI4PI3PI2PI1PI0Input/Output General Purpose I/O Signals - Port I1 RESET, CLOCK, AND POWER CONTROLLER (RCPC)62nRESETIN Input User Reset Input2 71nRESETOUT Output System Reset Output2 72INT6Input External Interrupt Input 61 PIN NO.SIGNAL NAME TYPE DESCRIPTION NOTESNOTES:1.These pin numbers have multiplexed functions.2.Signals preceded with ‘n’ are active LOW.73INT5Input External Interrupt Input 5174INT4Input External Interrupt Input 4176INT3Input External Interrupt Input 3177INT2Input External Interrupt Input 2178INT1Input External Interrupt Input 1179INT0Input External Interrupt Input 0181nPOR Input Power-on Reset Input282XTAL32IN Input 32.768 kHz Crystal Clock Input 83XTAL32OUT Output 32.768 kHz Crystal Clock Output 86XTALIN Input Crystal Clock Input 87XTALOUT Output Crystal Clock OutputTEST INTERFACE63TEST2Input Test Mode Pin 264TEST1Input Test Mode Pin 165TMS Input JTAG Test Mode Select Input 66RTCK Output Returned JTAG Test Clock Output 67TCK Input JTAG Test Clock Input 68TDI Input JTAG Test Serial Data Input 69TDOOutputJTAG Test Data Serial OutputPOWER AND GROUND (GND)31734425498112126134VDD Power I/O Ring VDD826414859106119127140VSS Power I/O Ring VSS1175VDDC Power Core VDD supply (Output if Linear Regulator Enabled, Otherwise Input)1480VSSC Power Core VSS70LINREGEN Input Linear Regulator Enable 84VSSA_PLL Power PLL Analog VSS 85VDDA_PLL Power PLL Analog VDD Supply 88VSSA_ADC Power A-to-D converter Analog VSS 97VDDA_ADCPowerA-to-D converter Analog VDD SupplyPIN NO.SIGNAL NAME TYPE DESCRIPTIONNOTESLH75411 Numerical Pin ListingTable 4.LH75411 Numerical Pin ListPIN NO.FUNCTIONAT RESETFUNCTION2FUNCTION3FUNCTIONTYPEOUTPUTDRIVEBUFFERTYPEBEHAVIOR DURINGRESET NOTES1PA7D15I/O8 mA Bidirectional Pull-up1 2PA6D14I/O8 mA Bidirectional Pull-up1 3VDD Power None4PA5D13I/O8 mA Bidirectional Pull-up1 5PA4D12I/O8 mA Bidirectional Pull-up1 6PA3D11I/O8 mA Bidirectional Pull-up1 7PA2D10I/O8 mA Bidirectional Pull-up1 8VSS Ground None9PA1D9I/O8 mA Bidirectional Pull-up1 10PA0D8I/O8 mA Bidirectional Pull-up1 11VDDC Power None12D7I/O8 mA Bidirectional Pull-up13D6I/O8 mA Bidirectional Pull-up14VSSC Ground None15D5I/O8 mA Bidirectional Pull-up16D4I/O8 mA Bidirectional Pull-up17VDD Power None18D3I/O8 mA Bidirectional Pull-up19D2I/O8 mA Bidirectional Pull-up20D1I/O8 mA Bidirectional Pull-up21D0I/O8 mA Bidirectional Pull-up22nWE8 mA Output HIGH3 23nOE8 mA Output HIGH3 24PB5nWAIT8 mA Bidirectional Pull-up1, 3 25PB4nBLE18 mA Bidirectional Pull-up1, 3 26VSS Ground None27PB3nBLE08 mA Bidirectional Pull-up1, 3 28PB2nCS38 mA Bidirectional Pull-up1, 3 29PB1nCS28 mA Bidirectional Pull-up1, 3 30PB0nCS18 mA Bidirectional Pull-up1, 3 31nCS08 mA Output Pull-up3 32PC7A238 mA Bidirectional Pull-down1 33PC6A228 mA Bidirectional Pull-down1 34VDD Power None35PC5A218 mA Bidirectional Pull-down1 36PC4A208 mA Bidirectional Pull-down1 37PC3A198 mA Bidirectional Pull-down1 38PC2A188 mA Bidirectional Pull-down1 39PC1A178 mA Bidirectional Pull-down1 40PC0A168 mA Bidirectional Pull-down1 41VSS Ground None42VDD PowerNone 43A158 mA Output LOW 44A148 mA Output LOW 45A138 mA Output LOW 46A128 mA Output LOW 47A118 mA OutputLOW48VSS GroundNone 49A108 mA Output LOW 50A98 mA Output LOW 51A88 mA Output LOW 52A78 mA Output LOW 53A68 mA OutputLOW54VDD Power None 55A58 mA Output LOW 56A48 mA Output LOW 57A38 mA Output LOW 58A28 mA OutputLOW59VSS Ground None 60A18 mA Output LOW 61A08 mA Output LOW 62nRESETIN None Input Pull-up 2, 363TEST2None Input Pull-up 264TEST1None Input Pull-up 265TMS None Input Pull-up266RTCK 8 mA Output 67TCK None Input 68TDI None Input Pull-up269TDO 4 mA Output 70LINREGEN None Input 571nRESETOUT8 mA Output 372PD6INT6DREQ 6 mA Bidirectional Pull-down173PD5INT5DACK 6 mA Bidirectional 1, 274PD4INT4UARTRX18 mA BidirectionalPull-up 175VDDC Power None 76PD3INT3UARTTX18 mA Bidirectional Pull-up 177PD2INT2 2 mA Bidirectional Pull-up178PD1INT1 6 mA Bidirectional 1, 279PD0INT02 mA Bidirectional180VSSC GroundNone 81nPOR None Input Pull-up2, 382XTAL32IN None Input 483XTAL32OUTNoneOutputPIN NO.FUNCTION AT RESETFUNCTION2FUNCTION 3FUNCTION TYPE OUTPUTDRIVEBUFFERTYPEBEHAVIOR DURINGRESETNOTES84VSSA_PLL Ground None 85VDDA_PLL PowerNone 86XTALIN None Input 487XTALOUT None Output88VSSA_ADC GroundNone 89AN3 (LR/Y-)PJ7None Input 90AN4 (Wiper)PJ6None Input 91AN9PJ5None Input 92AN2 (LL/Y+)PJ4None Input 93AN8PJ3None Input 94AN1 (UR/X-)PJ2None Input 95AN6PJ1None Input 96AN0 (UL/X+)PJ0None Input 97VDDA_ADCPower None 98VDD Power None 99PE7SSPFRM 4 mA Bidirectional Pull-up 1100PE6SSPCLK 4 mA Bidirectional Pull-down 1101PE5SSPRX 4 mA Bidirectional Pull-up 1102PE4SSPTX 4 mA Bidirectional Pull-down 1103PE3UARTTX08 mA Bidirectional Pull-up 1104PE2UARTRX0 2 mA Bidirectional Pull-up 1105PE1UARTTX24 mA BidirectionalPull-up1106VSS GroundNone 107PE0UARTRX2 4 mA Bidirectional Pull-up1108PF6CTCAP2B CTCMP2B 4 mA Bidirectional 2109PF5CTCAP2A CTCMP2A 4 mA Bidirectional 110PF4CTCAP1B CACMP1B 4 mA Bidirectional 2111PF3CTCAP1ACTCMP1A4 mA Bidirectional112VDD PowerNone 113PF2CTCAP0E 4 mA Bidirectional 2114PF1CTCAP0D 4 mA Bidirectional 115PF0CTCAP0C 4 mA Bidirectional 2116PG7CTCAP0B CTCMP0B 4 mA Bidirectional 117PG6CTCAP0A CTCMP0A4 mA Bidirectional 2118PG5CTCLK4 mA Bidirectional119VSS GroundNone 120PG4LCDVEEEN LCDMOD8 mA Bidirectional 121PG3LCDVDDEN 8 mA Bidirectional 122PG2LCDDSPLEN LCDREV 8 mA Bidirectional 123PG1LCDCLS 8 mA Bidirectional 124PG0LCDPS 8 mA Bidirectional 125PH7LCDDCLK8 mABidirectional PIN NO.FUNCTION AT RESET FUNCTION2FUNCTION 3FUNCTION TYPE OUTPUTDRIVEBUFFERTYPEBEHAVIOR DURINGRESETNOTESNOTES:1.Signal is selectable as pull-up, pull-down, or no pull-up/pull-down via the I/O Configuration peripheral.2.CMOS Schmitt trigger input.3.Signals preceded with ‘n’ are active LOW.4.Crystal Oscillator Inputs should be driven to 1.8 V ±10% (MAX.)5.LINREGEN activation requires a 0 Ω pull-up to VDD.126VDD Power None 127VSS GroundNone 128PH6LCDLP LCDHRLP 8 mA Bidirectional 129PH5LCDFP LCDSPS 8 mA Bidirectional 130PH4LCDEN LCDSPL8 mA Bidirectional 131PH3LCDVD118 mA Bidirectional 132PH2LCDVD108 mA Bidirectional 133PH1LCDVD98 mABidirectional 134VDD PowerNone 135PH0LCDVD88 mA Bidirectional 136PI7LCDVD78 mA Bidirectional 137PI6LCDVD68 mA Bidirectional 138PI5LCDVD58 mA Bidirectional 139PI4LCDVD48 mABidirectional 140VSS GroundNone 141PI3LCDVD38 mA Bidirectional 142PI2LCDVD28 mA Bidirectional 143PI1LCDVD18 mA Bidirectional 144PI0LCDVD08 mABidirectionalPIN NO.FUNCTION AT RESETFUNCTION2FUNCTION 3FUNCTION TYPE OUTPUTDRIVEBUFFERTYPE BEHAVIOR DURINGRESETNOTESLH75411 Signal DescriptionsTable 5.LH75411 Signal DescriptionsPIN NO.SIGNAL NAME TYPE DESCRIPTION NOTESMEMORY INTERFACE (MI)124567910D[15:0]Input/Output Data Input/Output Signals1 121315161819202122nWE Output Static Memory Controller Write Enable2 23nOE Output Static Memory Controller Output Enable2 24nWAIT Input Static Memory Controller External Wait Control1, 2 25nBLE1Output Static Memory Controller Byte Lane Strobe1, 2 27nBLE0Output Static Memory Controller Byte Lane Strobe1, 2 28nCS3Output Static Memory Controller Chip Select1, 2 29nCS2Output Static Memory Controller Chip Select1, 2 30nCS1Output Static Memory Controller Chip Select1, 2 31nCS0Output Static Memory Controller Chip Select2 323335363738394043444546A[23:0]Output Address Signals1 474950515253555657586061DMA CONTROLLER (DMAC)72DREQ Input DMA Request1 73DACK Output DMA Acknowledge1COLOR LCD CONTROLLER (CLCDC)120LCDMOD Output Signal Used by the Row Driver (AD-TFT, HR-TFT only)1 120LCDVEEEN Output Analog Supply Enable (AC Bias SIgnal)1 121LCDVDDEN Output Digital Supply Enable1 122LCDDSPLEN Output LCD Panel Power Enable1 122LCDREV Output Reverse Signal (AD-TFT, HR-TFT only)1 123LCDCLS Output Clock to the Row Drivers (AD-TFT, HR-TFT only)1 124LCDPS Output Power Save (AD-TFT, HR-TFT only)1 125LCDDCLK Output LCD Panel Clock1 128LCDLP Output Line Synchronization Pulse (STN), Horizontal Synchronization Pulse (TFT)1 128LCDHRLP Output Latch Pulse (AD-TFT, HR-TFT only)1 129LCDFP Output Frame Pulse (STN), Vertical Synchronization Pulse (TFT)1 129LCDSPS Output Row Driver Counter Reset Signal (AD-TFT, HR-TFT only)1 130LCDEN Output LCD Data Enable1 130LCDSPL Output Start Pulse Left (AD-TFT, HR-TFT only)1 131132133135136137138139141142143144LCDVD[11:0]Output LCD Panel Data bus1SYNCHRONOUS SERIAL PORT (SSP)99SSPFRM Output SSP Serial Frame1 100SSPCLK Output SSP Clock1 101SSPRX Input SSP RXD1 102SSPTX Output SSP TXD1UART0 (U0)104UARTRX0Input UART0 Received Serial Data Input1 103UARTTX0Output UART0 Transmitted Serial Data Output1UART1 (U1)74UARTRX1Input UART1 Received Serial Data Input1 76UARTTX1Output UART1 Transmitted Serial Data Output1UART2 (U2)105UARTTX2Output UART2 Transmitted Serial Data Output1 107UARTRX2Input UART2 Received Serial Data Input1ANALOG-TO-DIGITAL CONVERTER (ADC)89 90 91 92 93 94 95 96AN3 (LR/Y-)AN4 (Wiper)AN9AN2 (LL/Y+)AN8AN1 (UR/X-)AN6AN0 (UL/X+)Input ADC Inputs1Table 5.LH75411 Signal Descriptions (Cont’d)PIN NO.SIGNAL NAME TYPE DESCRIPTION NOTESTIMER 0117116115114113CTCAP0[A:E]Input Timer 0 Capture Inputs1117116CTCMP0[A:B]Output Timer 0 Compare Outputs1 118CTCLK Input Common External Clock1TIMER 1111110CTCAP1[A:B]Input Timer 1 Capture Inputs1 111110CTCMP1[A:B]Output Timer 1 Compare Outputs1 118CTCLK Input Common External Clock1TIMER 2109108CTCAP2[A:B]Input Timer 2 Capture Inputs1 109108CTCMP2[A:B]Input Timer 2 Compare Outputs1 118CTCLK Input Common External Clock1GENERAL PURPOSE INPUT/OUTPUT (GPIO)1 2 4 5 6 7 9 10PA7PA6PA5PA4PA3PA2PA1PA0Input/Output General Purpose I/O Signals - Port A124 25 27 28 29 30PB5PB4PB3PB2PB1PB0Input/Output General Purpose I/O Signals - Port B132 33 35 36 37 38 39 40PC7PC6PC5PC4PC3PC2PC1PC0Input/Output General Purpose I/O Signals - Port C172 73 74 76 77 78 79PD6PD5PD4PD3PD2PD1PD0Input/Output General Purpose I/O Signals - Port D1PIN NO.SIGNAL NAME TYPE DESCRIPTION NOTES89 90 91 92 93 94 95 96PJ7PJ6PJ5PJ4PJ3PJ2PJ1PJ0Input General Purpose I/O Signals - Port J199 100 101 102 103 104 105 107PE7PE6PE5PE4PE3PE2PE1PE0Input/Output General Purpose I/O Signals - Port E1108 109 110 111 113 114 115PF6PF5PF4PF3PF2PF1PF0Input/Output General Purpose I/O Signals - Port F1116 117 118 120 121 122 123 124PG7PG6PG5PG4PG3PG2PG1PG0Input/Output General Purpose I/O Signals - Port G1125 128 129 130 131 132 133 135PH7PH6PH5PH4PH3PH2PH1PH0Input/Output General Purpose I/O Signals - Port H1136 137 138 139 141 142 143 144PI7PI6PI5PI4PI3PI2PI1PI0Input/Output General Purpose I/O Signals - Port I1 RESET, CLOCK, AND POWER CONTROLLER (RCPC)62nRESETIN Input User Reset Input2 71nRESETOUT Output System Reset Output2 72INT6Input External Interrupt Input 61 73INT5Input External Interrupt Input 51 74INT4Input External Interrupt Input 41 76INT3Input External Interrupt Input 31 77INT2Input External Interrupt Input 21 78INT1Input External Interrupt Input 11 79INT0Input External Interrupt Input 01 PIN NO.SIGNAL NAME TYPE DESCRIPTION NOTESNOTES:1.These pin numbers have multiplexed functions.2.Signals preceded with ‘n’ are active LOW.81nPOR Input Power-on Reset Input282XTAL32IN Input 32.768 kHz Crystal Clock Input 83XTAL32OUT Output 32.768 kHz Crystal Clock Output 86XTALIN Input Crystal Clock Input 87XTALOUT Output Crystal Clock OutputTEST INTERFACE63TEST2Input Test Mode Pin 264TEST1Input Test Mode Pin 165TMS Input JTAG Test Mode Select Input 66RTCK Output Returned JTAG Test Clock Output 67TCK Input JTAG Test Clock Input 68TDI Input JTAG Test Serial Data Input 69TDOOutputJTAG Test Data Serial OutputPOWER AND GROUND (GND)31734425498112126134VDD Power I/O Ring VDD826414859106119127140VSS Power I/O Ring VSS1175VDDC Power Core VDD supply (Output if Linear Regulator Enabled, Otherwise Input)1480VSSC Power Core VSS70LINREGEN Input Linear Regulator Enable 84VSSA_PLL Power PLL Analog VSS 85VDDA_PLL Power PLL Analog VDD Supply 88VSSA_ADC Power A-to-D converter Analog VSS 97VDDA_ADCPowerA-to-D converter Analog VDD SupplyPIN NO.SIGNAL NAME TYPE DESCRIPTIONNOTESFUNCTIONAL OVERVIEWARM7TDMI-S ProcessorThe LH75401/LH75411 microcontrollers feature the ARM7TDMI-S core with an Advanced High-Performance Bus (AHB) 2.0 interface. The ARM7TDMI-S is a 16/32-bit embedded RISC processor and a member of the ARM7 Thumb family of processors. For more information, visit the ARM Web site at .Bus ArchitectureThe LH75401/LH75411 microcontrollers use the ARM Advanced Microcontroller Bus Architecture (AMBA) 2.0 internal bus protocol. Three AHB masters control access to external memory and on-chip peripherals:•The ARM processor fetches instructions and trans-fers data•The Direct Memory Access Controller (DMAC) trans-fers from memory to memory, from peripheral to memory, and from memory to peripheral•The LCDC refreshes an LCD panel with data from the external memory or from internal memory if the frame buffer is 16kB or less.The ARM7TDMI-S processor is the default bus mas-ter. An Advanced Peripheral Bus (APB) bridge is pro-vided to access to the various APB peripherals. Generally, APB peripherals are serviced by the ARM core. However, if they are DMA-enabled, they are also serviced by the DMAC to increase system performance while the ARM core runs from local internal memory.Power SuppliesFive-Volt-tolerant 3.3 V I/Os are employed. The LH75401/LH75411 microcontrollers require a single 3.3V supply. The core logic requires 1.8 V, supplied by an on-chip linear regulator. Core logic power may also be supplied externally to achieve higher system speeds. See the Electrical Specifications.Clock SourcesThe LH75401/LH75411 microcontrollers may use two crystal oscillators, or an externally supplied clock. There are two clock trees:•One clock tree drives an internal Phase Lock Loop (PLL) and the three UARTs. It supports a crystal oscillator frequency range from 14 MHz to 20 MHz. •The other is a 32.768 kHz oscillator that generates a 1Hz clock for the RTC. (Use of the 32.768 kHz crys-tal for the Real Time Clock is optional. If not using the crystal, tie XTAL32IN to VSS and allow XTAL32OUT to float.)The 14-to-20 MHz crystal oscillator drives the UART clocks, so an oscillator frequency of 14.7456 MHz is rec-ommended to achieve modem baud rates.The PLL may be bypassed and an external clock supplied at XTALIN; the SoC will operate to DC with the PLL disabled. When doing so, allow XTALOUT to float. The input clock with the PLL bypassed will be twice the desired system operating frequency, and care must be taken not to exceed the maximum input clock voltage. Maximum values for system speeds and input voltages are given in the Electrical Specifications.Figure 4.LH75401 System Application Example。
S32K 培训资料 单片机介绍
KFA family, rev A
Carl Culshaw, Systems Engineering, Automotive MCU
Oct 24.2014
TM
Confidential and Proprietary
Complex Safety Function
(e.g. EPS)
Simple Safety Function
(e.g. Airbag)
ASIL D target ASIL C target ASIL B target ASIL A target
EPS, ESP, Engine Vision based Management ADAS… MCU HEV… HW
(10.9 Safety Element out of Context)
SafeAssure Standard HW Airbag, Body, DIS…
(8.13 Qualification of Hardware Components)
Enabled for ISO 26262
Where we enable the customer to do the Qualification, testing and analysis to prove that our component is suitable for the purpose of his safety concept.
8
Functional Safety
Single Point Fault Metric
• •
Diversity of safety levels
Zynq PS_DMA应用笔记
Zynq PS DMA 应用笔记Hello,PandaZynq-7000系列器件PS 端的DMA 控制器采用ARM 的IP 核DMA-330(PL-330)实现。
有关DMA 控制器的硬件细节及相关指令集、编程实例内容参考ARM 官方文档:◆ DDI0424D :dma330_r1p2_trm.pdf ◆ DAI0239A :dma330_example_programs.pdf本文开发环境为Xilinx SDK2015.2,DMA 库版本为dmaps_v2_1。
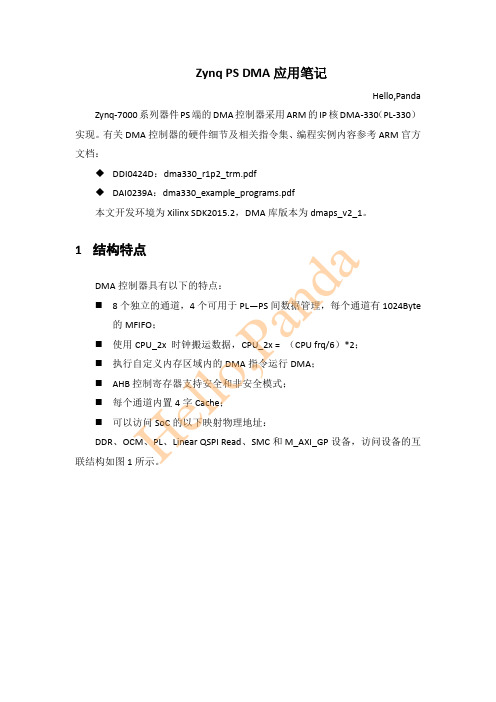
1 结构特点DMA 控制器具有以下的特点:⏹ 8个独立的通道,4个可用于PL —PS 间数据管理,每个通道有1024Byte的MFIFO ;⏹ 使用CPU_2x 时钟搬运数据,CPU_2x = (CPU frq/6)*2;⏹ 执行自定义内存区域内的DMA 指令运行DMA ; ⏹ AHB 控制寄存器支持安全和非安全模式;⏹ 每个通道内置4字Cache ;⏹ 可以访问SoC 的以下映射物理地址:DDR 、OCM 、PL 、Linear QSPI Read 、SMC 和M_AXI_GP 设备,访问设备的互联结构如图1所示。
H e ll o,Pa n da图1 Zynq 访问互联结构图从图1可以看出DMA 控制器可以访问连接到Central Interconnect 上的所有设备,并提供了四个通道的外设管理接口可用于控制PL 的数据搬运。
Zynq 系列器件中DMA 控制器采用ARM PL-330 IP 和r1p1版,结构框图如图2所示。
H e ll o,Pa n da图2 Zynq DMA 控制器结构框图如图2所示,DMA 控制器由指令加速引擎,AXI Master 数据接口,AXI APB 寄存器访问接口以及可以连接到PL 的外设请求接口,数据缓冲FIFO 和控制及状态产生单元组成。
从图2可以看到,DMA PL330的设计思想是:DMA 控制器通过DMA 指令执行引擎执行自己的指令,并将执行状态通过APB 总线和中断等形式反馈给CPU ,达到数据搬运不占用CPU 的目的。
FPGA可编程逻辑器件芯片XC2V1000-4FG256C中文规格书
AXI4 Memory Mapped with PCIe to AXI4-Lite Master and PCIe to DMA Bypass Example DesignThe following figure shows a system where the PCIe to AXI4-Lite Master (BAR0) and PCIe to DMA Bypass (BAR2) are selected. 4K block RAM is connected to the PCIe to DMA Bypass interfaces. The host can use DMA Bypass interface to read/write data to the user space using the AXI4 MM interface. This interface bypasses DMA engines. The host can also use the PCIe to AXI4-Lite Master (BAR0 address space) to write/read user logic. The example design connects 4K block RAM to the PCIe to AXI4-Lite Master interface so the user application can perform read/writes.Figure 22: AXI-MM Example with PCIe to DMA Bypass Interface and PCIe to AXI-LiteMaster Enabled*may include wrapper as necessaryX15047-010115AXI4 Memory Mapped with AXI4-Lite Slave Interface Example DesignWhen the PCIe® to AXI4-Lite master and AXI4-Lite slave interface are enabled, the generated example design (shown in the following figure) has a loopback from AXI4-Lite master to AXI4-Lite slave. Typically, the user logic can use a AXI4-Lite slave interface to read/write DMA/Bridge Subsystem for PCI Express® registers. With this example design, the host can use PCIe to AXI4-Lite Master (BAR0 address space) and read/write DMA/Bridge Subsystem for PCI Express®registers, which is the same as using PCIe to DMA (BAR1 address space). This example design also shows PCIe to DMA bypass Interface (BAR2) enabled.Figure 23: AXI-MM Example with AXI-Lite Slave Enabled*may include wrapper as necessaryX15045-010115Chapter 6: Example DesignAXI4-Stream Example DesignWhen the AXI4-Stream interface is enabled, each H2C streaming channels is looped back to C2H channel. As shown in the following figure, the example design gives a loopback design for AXI4 streaming. The limitation is that you need to select an equal number of H2C and C2H channels for proper operation. This example design also shows PCIe to DMA bypass interface and PCIe to AXI-Lite Master selected.Figure 24: AXI4-Stream Example with PCIe to DMA Bypass Interface and PCIe to AXI-Lite Master EnabledX15046-010115。
DSP2812深入讲解
DSP 的发展历史大致可以分成四个阶段:萌芽阶段、成长阶段、成熟阶段、突破阶段。 萌芽阶段:1982 年以前 在这段时期里为解决 Von Neumann 结构在进行数字信号处理时总线和存储器之间的瓶颈效应,许多公司投入 大量人力和物力开展了很多探索性的工作,研制出了一些 DSP 的雏形,如 AMI 的 S2811、INTEL 的 2920、 AT&T 的 DSP-1 和 NEC 的 uPD7720。但这些产品的运算速度都太慢,而且开发工具严重不足,无法进行大 规模的开发工作,还不能称作真正意义上的 DSP。第一片 DSP 是 1982 年 TI 公司出品的 TMS320C10,它是 —个 16 位的定点 DSP,采用了哈佛(Harvard)结构,有一个乘加器和一个累加器。TMS320C10 完成—次乘加 操作需要 390ns,即在一秒钟的时间内可以完成 250 万次左右的乘加运算。或许正是因为生产出了第一个 DSP, TI 公司在此后的三十几年中一直是 DSP 界的领军人物。 成长阶段:1982-1987 年 这段时间内各公司相继研制出了自己的 DDSP 并不断地改进。如 1985 年,TI 推出了 TMS320C20,它具备单 指令循环的硬件支持,寻址空间达到 64K 字,有专门的地址寄存器,一次乘加运算只需耗时 200ns。1987 年, MOTOROLA 公司推山了 DSP56001,采用 24 位的数据和指令,有专门的地址寄存器,可以循环寻址,累加 器有保护位,一坎乘加运算只需耗时 75ns。此外,在这段时期中还有一些代表产品,如 AT&T 的 DSPl6A、 AD 的 ADSP-2100,TI 的 TMS320C50。 成熟阶段:1987-1997 年 在这个阶段里各公司不断借鉴相互的优点,并完善自身的设计,推出了特点分明的产品,如 TI 的 TMS320C54 系列、AD 的 ADSP2100 系列、Lucent(前身为 AT&T)的 DSPl600 系列和 MOTOROLA 的 DSP56000 系列。 它们在供电上都支持 3.3v,片上的存储器也较大,都有 JTAG 模块支持用户在线调试。另外,TI 等公司还专门 提供 DSP 的内核,为一些专用集成电路(ASIC)的开发提供了空间。此外,在成熟阶段还首次出现了多处理核 的 DSP,如 TI 的 TMS320C80 和 MOTOROLA 的 MC68356 等,虽然它们的推出在商业上并不算成功,但却 指明了一个有潜力的发展方向。 突破阶段:1997 年直至现在 这段时间里 DSP 的发展非常迅速,各公司相继建立了自己从定点到浮点,从低端到高端,从通用到专用完整 的产品系列,并且在 DSP 设计上有了大的飞跃,推出了一些性能突出的产品。很多公司相继采用先进技术研 制了计算性能很高的 DSP,如 AD 的 SHARC 系列、TI 的 TMS320C6000 系列、MOTOROLA 和 Agere(前身 为 Lucent 微电子)的 StarPro 等,每秒钟可以完成 1G 条以上的指令,计算速度惊人。TI 公司还研制出功耗最 小的 DSP TMS320C55 系列,为便携式设备提供了一个明智的选择。 回顾 DSP 发展的二十几年,也正是电子、信息和微电于技术快速发展的二十年,正是后者为 DSP 提供了必要 的技术支持和应用的广阔空间,使得 DSP 及其相关的技术日益受到人们的重视。
Cadence-使用参考手册
Cadence 使用参考手册邓海飞微电子学研究所设计室20XX7月目录概述11.1 Cadence概述11.2 ASIC设计流程1第一章Cadence 使用基础52.1 Cadence 软件的环境设置52.2 Cadence软件的启动方法102.3库文件的管理122.4文件格式的转化132.5 怎样使用在线帮助132.6 本手册的组成14第二章Verilog-XL 的介绍153. 1 环境设置153.2 Verilog-XL的启动153.3 Verilog-XL的界面173.4 Verilog-XL的使用示例183.5 Verilog-XL的有关帮助文件19第四章电路图设计与电路模拟214.1 电路图设计工具Composer (21)4.1.1 设置214.1.2 启动224.1.3 用户界面与使用方法224.1.4 使用示例244.1.5 相关在线帮助文档244.2 电路模拟工具Analog Artist (24)4.2.1 设置244.2.2 启动254.2.3 用户界面与使用方法254.2.5 相关在线帮助文档25第五章自动布局布线275.1 Cadence中的自动布局布线流程275.2 用AutoAbgen进行自动布局布线库设计28第六章版图设计与其验证306.1 版图设计大师Virtuoso Layout Editor (30)6.1.1 设置306.1.2 启动306.1.3 用户界面与使用方法316.1.4 使用示例316.1.5 相关在线帮助文档326.2 版图验证工具Dracula (32)6.2.1 Dracula使用介绍326.2.2 相关在线帮助文档33第七章skill语言程序设计347.1 skill语言概述347.2 skill语言的基本语法347.3 Skill语言的编程环境347.4面向工具的skill语言编程35附录1 技术文件与显示文件示例60附录2 Verilog-XL实例文件721.Test_memory.v (72)2.SRAM256X8.v (73)3.ram_sy1s_8052 (79)4.TSMC库文件84附录3 Dracula 命令文件359概述作为流行的EDA工具之一,Cadence一直以来都受到了广大EDA工程师的青睐。
基于FPGA 的LVDS设计
CLR
CLK4X INV
LO
CLR
IDAT14 D0
IDAT10 D1
IDAT6 D2
IDAT2 D3
LR
L
IDAT12 D0
RISEDATA IDAT8 D1
IDAT4 D2 IDAT0 D3
LF
L
FALLDATB
CLK4X
DDRFD VCC
INV D0 D1
GND
CLK4X
CLK4X
LO
CLR
LO
36
2003.5
绘 制 原 理 图 或 设 计 状 态 机 的 方 法 生 成 网 络 表 ,功 能 仿 真 正 确 后 ,经 过 翻 译 、映 射 、放 置 和 布 线 、时 序 优 化 及 配 置 过 程 ,生 成 比 特 流 文 件 。然 后 ,进 行 时 序仿真,仿真通过后下载到 PROM 中。(我们用了 Xilinx 公司的 XC18V01。)
ELSIF CLK 'EVEN T AN D CLK='1 ' T HEN COU NT <=
(COUN T +1) M OD 256;
END PROCESS;
TC<='1 ' WHEN COU NT=255 ELSE '0';
TYPE STATE _TYPE I S (IDL E, PACK1, PACK2, TRANS-
靠近子卡的边缘连接器(≤ 1.52 cm),并给每个差
分引脚串联一个 20 Ω的贴片电阻。 ④ 电源方面:Virtex芯片上电时要求有大于 500
mA 的驱动电流,同时,由于多个输出引脚的电位 快 速 变 化 ,要 求 每 对 电 源 和 地 引 脚 都 要 良 好 旁 路 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1Tutorial: Using DMA for Shared Memory in an Image Filter, on the Virtex-4 FX Platform (EDK 10.1)OverviewThis tutorial will demonstrate how to create, simulate and build an application targeting the XilinxVirtex-4 FX platform, including the use of data streams and the shared memory interface. It includesall steps necessary to create a new platform using the Xilinx EDK 10.1 tools.This tutorial will require approximately one hour to complete, including software run times. To complete the application, you will need access to a Xilinx ML403 development board (or equivalent boardequipped with a Xilinx Virtex-4 FX device).General StepsThis tutorial will take you through the entire process of creating a hardware-accelerated system in theVirtex-4 FX FPGA using the Impulse and Xilinx tools. This is an advanced tutorial with many detailed steps, but can be summarized as the following general steps:1.Describe and simulate the application using C language and the Impulse CoDeveloper tools.2.Automatically generate hardware, in the form of VHDL source files, for the hardware acceleratorportion of the application.3.Export the generated files to an EDK project directory.4.Build a new EDK project describing the PowerPC and all required peripherals.5.Attach the hardware accelerator generated in step 2 to the PowerPC via the PLB interface.6.Add all needed software files representing the application to be run on the PowerPC.7.Run synthesis and place-and-route to generate a downloadable bitmap.8.Download the application to the ML403 board using a JTAG programming cable.Detailed StepsLoading the Sample ApplicationUnderstanding the ImageFilterDMA ApplicationCompiling the Application for SimulationBuilding the Application for HardwareExporting the Hardware and Software FilesCreating the ML403 Test PlatformAdding the ImageFilterDMA HardwareAdding the Software Application FilesBuilding and Downloading the Application1.1Loading the Sample ApplicationImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 1To begin, start the CoDeveloper Application Manager:Start -> Programs -> Impulse Accelerated Technologies -> CoDeveloper -> CoDeveloperApplication ManagerOpen the Xilinx Virtex-4 FX ImageFilterDMA sample project by selecting Open Project from the Filemenu, or by clicking the Open Project toolbar button. Navigate to the.\Examples\Embedded\ImageFilterDMA_VirtexIIPro directory within your CoDeveloper installation.(You may wish to copy this example to an alternate directory before beginning.) Opening the projectwill result in the display of a window similar to the following:Files included in the Mandelbrot project include:Source file img_hw.c - This source file includes the Image Filter DMA process, and also includes the application's configuration function.Source file img_sw.c - This source file includes the test application that runs on the target PowerPC processor. The test application includes a main() function, and a call_fpga function to access theexternal DDR SDRAM. As written, this test application can be compiled either on the PowerPCprocessor or as a desktop simulation executable.Source file img.h - This header file defines the size of the test image.Source file test.h - This header file include a test image.See AlsoUnderstanding the ImageFilterDMA Application1.2Understanding the Image Filter DMA ApplicationImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 2This tutorial example demonstrates a number of important concepts of Impulse C programming forXilinx Virtex-4 FPGA platforms. The most important of these concepts is the use of shared memory. In platforms based on the PowerPC processor, it is often most efficient to move large blocks of databetween software and hardware elements of the system using direct memory access (DMA)techniques, rather than making use of streams. Which method you use (memories or streams) willdepend on the nature of the application, so you may wish to try both methods and compare relativeperformance.In this example we will create a simple image filter, which operates on incoming image data (pixelvalues) to generate a converted image. The specific image processing algorithm that we have chosen for this example is an image convolution algorithm, which is a critical step in many image processingalgorithms and is representative of other such image processing filters.The specific convolution performed in this test case is an edge-detection function, in which a 3x3 pixel "window" is assembled and processed for each pixel in the source image. The algorithm is represented by two pipelined hardware processes that decompose the image data into three rows of image dataand process those rows to calculate a resulting value from a 3x3 pixel window. Two additionalhardware processes are used to read and write image data from shared memory and present the data to the image processing algorithm as a stream.These four processes and the corresponding stream, memory and signal declarations are describedusing Impulse C and interconnected using the configuration function shown below:void config_img(void *arg){int error;co_signal startsig, donesig;co_memory shrmem;co_stream istream, row0, row1, row2, ostream;co_process reader, writer;co_process cpu_proc, prep_proc, filter_proc;startsig = co_signal_create("start");donesig = co_signal_create("done");shrmem = co_memory_create("image", "heap0", IMG_WIDTH * IMG_HEIGHT *sizeof(uint16));istream = co_stream_create("istream", INT_TYPE(32), IMG_HEIGHT/2);row0 = co_stream_create("row0", INT_TYPE(32), 4);row1 = co_stream_create("row1", INT_TYPE(32), 4);row2 = co_stream_create("row2", INT_TYPE(32), 4);ostream = co_stream_create("ostream", INT_TYPE(32), IMG_HEIGHT/2);cpu_proc = co_process_create("cpu_proc", (co_function)call_fpga, 3, shrmem,startsig, donesig);reader = co_process_create("reader", (co_function)to_stream, 3, startsig,shrmem, istream);prep_proc = co_process_create("prep_proc", (co_function)prep_run, 4, istream,row0, row1, row2);filter_proc = co_process_create("filter", (co_function)filter_run, 4, row0,row1, row2, ostream);writer = co_process_create("writer", (co_function)from_stream, 3, ostream,shrmem, donesig);co_process_config(reader, co_loc, "PE0");co_process_config(prep_proc, co_loc, "PE0");co_process_config(filter_proc, co_loc, "PE0");co_process_config(writer, co_loc, "PE0");IF_SIM(error = cosim_logwindow_init();)}Note that a fifth process (call_fpga) is included that represents the controlling software application that will run on the embedded PowerPC processor.See AlsoCompiling the Application for Simulation1.3Compiling the Application for SimulationImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 3The software test bench provided with this example (in img_sw.c) has been written in such a way that it can be compiled either to an FPGA as hardware (using fixed point math operations) or be compiled for desktop simulation, using either fixed or floating point math operations. This makes it possible tocompile and simulate the application for the purpose of functional verification.Select Project -> Build Simulation Executable (or click the Build Simulation Executable button) to build the Mand.exe executable. The CoDeveloper transcript window will display the compile and linkmessages as shown below:You now have a Windows executable representing the application implemented as a desktop (console) software application. You can run this executable by selecting Project -> Launch Simulation Executable. A command window will open and the simulation executable will run as shown below:The left-hand side is the output from software only filtering, and the right-hand side is from the hardware accelerated filtering.See AlsoBuilding the Application for Hardware1.4Building the Application for HardwareImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 4Specifying the Platform Support PackageTo specify a platform target, open the Generate Options dialog as shown below:Specify Xilinx Virtex-4 PLB v4.6 as shown. Also specify "hw" and "sw" for the hardware and software directories as shown, and specify "EDK" for the hardware and software export directories. ("EDK" is the directory in which you will be creating a Xilinx Platform Studio project.)Click OK to save the options and exit the dialog.Generate HDL for the Hardware ProcessTo generate hardware in the form of HDL files, and to generate the associated software interfaces and library files, select Generate HDL from the Project menu, or click the Generate HDL button as shown:A series of processing steps will run in a command window as shown below:Note: the processing of this example may require a minute or more to complete, depending on theperformance of your system.When processing has completed you will have a number of resulting files created in the hw and swsubdirectories of your project directory. These files are ready to be exported into a Xilinx PlatformStudio project directory.See AlsoExporting the Hardware and Software Files1.5Exporting the Hardware and Software FilesImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 5Recall that in the previous step you specified the directory "EDK" as the export target for hardware and software. These export directories specify where the generated hardware and software processes are to be copied when the Export Software and Export Hardware features of CoDeveloper are invoked.Within these target directories (in this case "EDK"), the specific destination for each file previouslygenerated is determined from the Platform Support Package architecture library files. It is thereforeimportant that the correct Platform Support Package (in this case Xilinx Virtex-4 APU) is selected prior to starting the export process.To export the files from the build directories (in this case "hw" and "sw") to the export directories (in this case the "EDK" directory), select Project -> Export Generated Hardware (HDL) and Project -> ExportGenerated Software, or select the Export Generated Hardware and Export Generated Softwarebuttons from the toolbar.Export the Hardware FilesExport the Software FilesNote: you must select BOTH Export Software and Export Hardware before going onto the next step.You have now exported all necessary files from CoDeveloper for use in the Xilinx tools environment.By opening a Windows Explorer window, you can see how the hardware and software files have beencopied into subdirectories of your EDK directory. In particular, notice that CoDeveloper has created a"pcores/plb_img_arch_v1_00_a" directory containing the generated HDL and other related files. Thisgenerated directory structure will allow you to import the generated core directly into the PlatformStudio tools.See AlsoCreating the ML403 Test Platform1.6Creating the ML403 Test PlatformImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 6At this point you have:·Created hardware for the accelerator.·Exported the generated hardware to the EDK subdirectory as a pcore.·Exported the PowerPC software application files to the EDK subirectory.In this tutorial section, you will be making use of the Platform Studio tools, including the Base System Builder Wizard, to define and build a new PowerPC-based platform targeting the Xilinx ML403 development board. You will first create a test platform allowing you to download and verify your PowerPC and its standard peripherals. After successfully creating and testing the basic platform, you will add the necessary hardware and software files to build, download and test the Mandelbrot sample application.Note: If you are using a different Virtex-4 FPGA development board, you will need to obtain an associated .XBD file from your board vendor, as described in the introduction to this tutorial.Using Base System Builder to Create the PlatformTo begin, start the Xilinx Platform Studio tools and select the Base System Builder Wizard as shown below:Click the OK button to proceed. When asked for a project name and location, specify the EDK subdirectory of your project, and accept the default project name (system.xmp) as shown below:Press the OK button to continue.You will now be presented with the Base System Builder Wizard. Select the "I would like to create a new design" option, then click Next to continue:Next, select your target board using the "Board vendor" and "Board name" drop-down lists. To use the Xilinx ML403 board with attached LCD display, choose the "Virtex 4 ML403"" board as shown:Click the Next button to proceed to the next Wizard page.On the Select Processor page, be sure PowerPC is selected as the target processor, then click Next:On the Configure PowerPC page, specify the following options: Processor clock frequency: 100 MHzBus clock frequency: 50 MHzDebug I/O: JTAGCache setup: EnableOn-chip memory (OCM): NONEClick Next to continue. You will now be presented with a series of pages for configuring various I/O interfaces. Select the RS232_Uart and LEDs_4Bit peripherals as shown, but do not select the LEDs_Positions and the Push_Button_Position peripheral:Click Next.On the next Wizard page, select only the DDR_SDRAM peripheral:Click Next.On the page that follows, do not select any of the peripherals:Click Next.On the Add Internal Peripherals page, change the memory size of the plb_bram_if_cntlr_1 to 16 KB as shown:Click Add Peripheral button to open the Add Peripheral dialogue. Choose XPS TIMER from the peripheral list as shown below:Click OK.The xps_timer_1 is added to the peripheral list. Configure the timer as the following options: Counter bit width: 32Timer mode: One timer is presentUse interrupt: noClick Next to continue.On the Cache Setup page, enable both cache selections as shown:Click Next.The Wizard will now ask if you want to create memory and peripheral test applications. Select the "Peripheral selftest" application, but do not select the "Memory test" application:Click Next.You will now be prompted for memory locations for Instruction, Data and Stack/Heap for thePeripheralTest application. Select xps_bram_if_cntlr_1 for the Instruction field, the Data andStack/Heap fields as shown below:Click Next.The Wizard will now display a summary of your platform selections:Click the Generate button to generate the platform with the specified configurations. After the platform has been generated, the Wizard will display a final page, and will give you the option of saving the platform settings to a .BSB file. This file can be used when creating new platforms with similar settings.Click Finish to exit the Wizard.The Platform Studio interface will now appear similar to the following:Building and Running the Peripheral TestBefore creating and building the ImageFilterDMA sample application, it is a good idea to do a quick test of the platform, using the Peripheral Selftest test application created by Base System Builder. To build the test application, you must first generate the PowerPC libraries, peripheral drivers, and other files needed for the software portion of the application. To do this, select the Generate Libraries and BSPs command from the Software menu as shown below:When the libraries have been built, Platform Studio will display a message similar to the following:Next, select the Generate Bitstream command from the Hardware menu as shown below. This command starts the synthesis and place-and-route process, resulting in a downloadable .BIT file. This will take a few minutes, depending on the speed of your computer.After the bitstream generation has completed, make sure your JTAG cable is plugged in properly and the ML403 board is powered up. Select Download Bitstream from the Device Configuration menu as shown below:When the FPGA has been successfully programmed, you will see a "Programming Complete" message in the Platform Studio transcript, and you will see a small row of LEDs located light up in sequence on the lower right corner of board.You have now verified the complete design flow and all needed hardware connections, from PlatformStudio and Base System Builder to the ML403 board. In the next tutorial section, you will replace thistest application with a new application representing the Image Filter DMA.See AlsoAdding the ImageFilterDMA Hardware1.7Adding the ImageFilterDMA HardwareImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 7In the previous step you used Xilinx Platform Studio and the Base System Builder to create a testapplication, ready to download and run on the ML403 board. This test was important because itestablished that all required peripherals, memories, etc. had been properly assembled, forming a base platform on which the Mandelbrot example can be implemented.In the steps that remain, we will modify the base platform to:·Add the ImageFilterDMA accelerator·Make bus and port connections of the components·Add the ImageFilterDMA software application files·Build the platform, including synthesizing the new cores·Download and run the ImageFilterDMA application on the target boardAdding the ImageFilterDMA CoreTo add the ImageFilterDMA accelerator core as a peripheral, select the IP Catalog tab and look for the category titled "Project Local pcores". Under USER directory you will find the core that was created(copied to) the EDK/pcores directory of your project. Add the plb_img_arch core by clicking the rightmouse button as shown below:This will add the core to the project as a peripheral. Adding IP CoresNext, add a Processor Local Bus (PLB) 4.6 as shown below:A XPS Central DMA Controller ( MPLB device) is needed on the PLB to keep the EDK from optimizing out some arbitrating mechanism. Add the IP core as shown below:Configure the DDR_SDRAM ControllerThe MPLB of plb_img_arch_0 needs to connect to the DDR_SDRAM through a separate SPLB port. To do this, open the Configure IP Dialogue of the DDR_SDRAM:Change the Port Type Configuration of Port 2 from INACTIVE to PLBV46 as shown below. This will add another PLBV46 port to the DDR_SDRAM.Connect Bus InterfacesNow, the Bus Interfaces view of the system should look like this:Connect the MPLB of the plb_img_arch_0, and the MPLB of the xps_central_dma_0 to the newly added PLB (plb_v46_0), also connect the SPLB2 of the DDR_SDRAM to the same plb_v46_0. Connect the SPLB of the plb_img_arch_0 to the shared PLB (plb) as shown below (as indicated in red circles):Connecting the Peripheral Clock and Reset SignalsTo do this, switch to the Ports Tab in the System Assembly View Window. Connect the PLB_Clk signal of the plb_v46_0 peripheral to sys_clk_s:And connect the SYS_Rst signal of plb_v46_0 to sys_bus_reset:Generate AddressesNext step is to generate addresses for the memory related modules in EDK. Switch to the Addresses Tab of the System Assembly View Window.Change the size of the xps_central_dma_0 from U (undefined) to 64 as shown below:Click the Generate Addresses button on the upper right corner to let EDK assign addresses for the modules as shown below:Generate BitstreamNow, build the hardware by choosing the Hardware -> Generate Bitstream menu. The synthesis, place-and-route and bitstream generation process will take a few minutes to complete depending on your PC.The process is done. A file "system.bit" is created.The hardware side of the application, including the ImageFilterDMA accelerator and the PLB interface, is now ready for use. In the next tutorial section you will set up the software side of the application.See AlsoAdding the Software Application Files1.8Adding the Software Application FilesImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 8The hardware configuration, including all required peripheral settings and connections, is nowcomplete. The next step is to add the sample application.Create Image Filter DMA Software ApplicationSelect the Applications tab of the project, double-click the Add Software Application Project to show a dialogue. Type in the Project Name as "ImageFilterDMA" and click OK as shown below:Adding the Image Filter DMA Application Source FilesTo add source C files to the project, open the Add Existing Files Dialogue from the Sources category by using right mouse button as shown below:Select all files from the code subdirectory of your project as shown below:Next, add header files to your project similar to above as shown below:Setting Compiler OptionsNow you will need to set compiler options for the project. To set the compiler options, right-click on the project title and select Generate Linker Script from the menu as shown below:A Generate Linker Script dialogue appears. Change the Heap Size and Stack Size to 0x2000000 and 0x1000000, respectively:Click OK to close the Generate Linker Script dialog.The software application is now ready to compile for the PowerPC processor.See AlsoBuilding and Downloading the Application1.9Building and Downloading the ApplicationImage Filter DMA Accelerator Tutorial for Virtex-4 FX, Step 9The application is now ready to build, download and execute on the target ML403 board.First, compile the software application to create a PowerPC executable. Do this by selecting Build Project from the Project: mand entry as shown below:The size of the generated executable is shown below. It will be included in the FPGA bitstream.Next, mark the ppc405_bootloop to initialize BRAMs by using the right mouse button. This will put a loop in the starting address of the on-chip memory.Now, it is time to download the bitstream to the ML403 board. Make sure the JTAG cable is properly connected and that the ML403 board is powered on. Also make sure the crossover RS-232 serial cable is connected properly between the ML403 and your PC.Open the TeraTerm application to receive the UART output. The serial port is set to be 9600-8-N-1, no flow control, as shown below:Click OK to accept the settings.Select Download Bitstream as shown below:Next, launc h Xilinx Microprocessor Debugger (XMD) from the menu as shown below:If this is the first time you have launched XMD for this EDK project, a couple of dialogue windows will pop up. Just click OK, then the XMD terminal will appear.Download the ImageFilterDMA ELF file to the DDR_SDRAM, and then start running the program using the following commands:dow ImageFilterDMA/executable.elfconAfter downloading has completed, the application will start running, resulting in an output image in the TeraTerm window similar to the following:The execution times of software only filtering and hardware accelerated filtering are measured and compared, and the acceleration factor is 103.Congratulations! You have completed this advanced tutorial.See AlsoTutorial 2: Image Filter DMA Using Shared Memory on the Virtex-4 Platform (EDK 10.1)。