简谐激励下强迫振动的响应特性
第三章强迫振动(2011版)
第三章 强迫振动3.1 引言本章讨论.1自由度线性系统在周期激扰作用下的强迫振动,通常称为振系对周期激扰的响应。
周期激扰可以是作用于振系的周期扰力,也可以是振系支座的周期运动。
本章着重讨论正弦型激扰的情形,因为这种情形比较简单。
而所得结论却有很重要的工程应用.任意的周期激扰,都可以通过谐波分析,分解为若干个正弦型激扰,只要分别求份各个正弦型激扰单独引起的振动,然后累加,就可以得到振系对任意周期激扰响应。
叠加原理适用于线性系统,振系由周期激所引起的振动,需要同初始激扰所引起的自由振动相叠加。
才得到振系总的运动。
本章还简略地说明强迫振动理论应用于隔振与侧振等问题;最后提出激扰力与阻尼力在强迫振动各个周期内所做的功,以及各种非线性阻尼的等值粘性阻尼系数的计算方法。
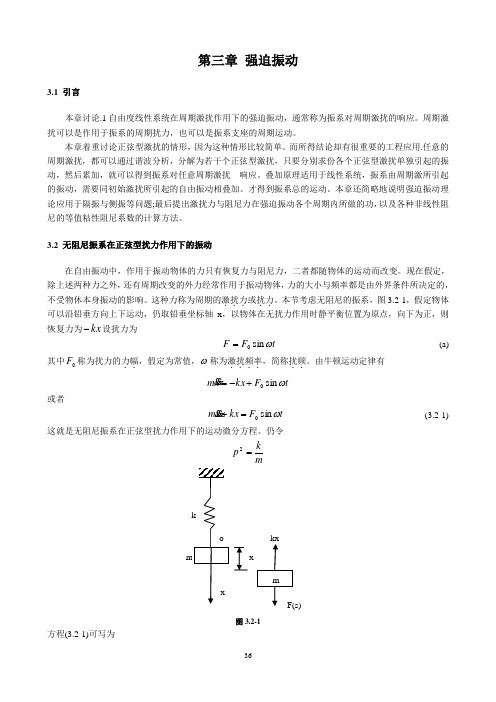
3.2 无阻尼振系在正弦型扰力作用下的振动在自由振动中,作用于振动物体的力只有恢复力与阻尼力,二者都随物体的运动而改变。
现在假定,除上述两种力之外,还有周期改变的外力经常作用于振动物体,力的大小与频率都是由外界条件所决定的,不受物休本身振动的影响。
这种力称为周期的激扰力...或扰力..。
本节考虑无阻尼的振系,图3.2-1,假定物体可以沿铅垂方向上下运动,仍取铅垂坐标轴 x ,以物体在无扰力作用时静平衡位置为原点,向下为正,则恢复力为kx -设扰力为t F F ωsin 0= (a)其中0F 称为扰力的力幅..,假定为常值,ω称为激扰频率....,简称扰频..。
由牛顿运动定律有 t F kx xm ωsin 0+-= 或者t F kx xm ωsin 0=+ (3.2-1) 这就是无阻尼振系在正弦型扰力作用下的运动微分方程。
仍令m k p=2图3.2-1方程(3.2-1)可写为t mF x p xωsin 02=+ (3.2-1)’这是非齐次...的二阶常系教线性常微分方程,它的解由两部分组成,即 21x x x += (b)其中1x 代表方方程(3.2-1)在右端为零时〔即齐次方程(2.2-1)的通解,简称为齐次解...,可以写为方程(2.2-2)或(2.2-5)的形式。
单自由度强迫振动

3.1 单自由度系统在谐和 激振下的强迫振动
所谓谐和激励就是正弦或余弦激励。
设激励为 F(t)=F0sinwt ,这 里 w为激振频率,利用牛顿定 律并引入阻尼比x 可得到
F0 x 2wnx x w x sin wt m
2 n
第3章 单自由度系统强迫振动
3.1 单自由度系统在谐和激振下的强迫振动
xwnt
上述解的第一部分代表由初始条件引
起的自由振动;
第3章 单自由度系统强迫振动
3.1 单自由度系统在谐和激振下的强迫振动
7
第二部分
X 0e
xwnt
xwn sin w cos sin wd t sin cos wd t wd
代表由干扰力引起的自由振动。 这两部分都是衰减振动,随时间的推移而消
失,称为瞬态响应或暂态响应;
最后只剩下第三部分
X 0 sin(w t ) ,代表
与激振力同形式的等幅的强迫振动,称为稳态响 应,这才是我们最关心的。
第3章 单自由度系统强迫振动
3.1 单自由度系统在谐和激振下的强迫振动
8
若为余弦激励, 则响应(解)为:
x0 xwn x0 xe sin wd t x0 cos wd t wd xw t xwn cos w sin X 0e sin wd t cos cos wd t wd
第3章 单自由度系 统强迫振动
第3章 单自由度系统强迫振动
1
系统在外部激励作用下的振动称为受
迫振动或强迫振动。
自由振动只是系统对初始扰动 ( 初始
条件)的响应。由于阻尼的存在,振动现象
很快就会消失。
2.5简谐强迫振动理论的应用
因此满载和空载时的振幅比:
B1 0.60 B2
17
单自由度系统受迫振动 / 工程中的受迫振动问题
26
单自由度系统受迫振动 / 工程中的受迫振动问题 / 振动的隔离
振动的隔离
将地基的振动与机器设备隔离,以避免将振动传至设备, 称为消极隔振. 隔振前 it 基础位移: x f De m 隔振后设备的振幅 被动隔振系数 隔振前设备的振幅 x f Deit
me B1 M
0
k M
s 0
2s tg 1 s2
1
m e 2 A k
11
单自由度系统受迫振动 / 支承运动引起的强迫振动
• 支承运动引起的强迫振动
背景:地基(或者支承)振动引起的受迫振动 比如:精密仪器受周围环境振动的影响而振动 车辆在不平路面上行驶而引起振动
x
x(t ) X sin(t )
5
得响应:
单自由度系统受迫振动 / 旋转失衡引起的强迫振动
x(t ) X sin( t )
H ( )
1 (1 s 2 )2 (2 s)2
其中 s 为 : s n
2 F me M 2 me me 2 me 2 A 又写为 : A 0 ( ) s k k k M M n M
me 2 响应的振幅为 : X ( ) H ( ) 1s 2 H ( ) M n
响应的相角为 :
2 / n 2 s arctan arctan 2 1 ( / n ) 1 s2
简谐强迫振动理论的应用(doc28张)

§2.5 简谐强迫振动理论的应用 单自由度系统受简谐激励的强迫振动在实际中广泛存 在,下面是几个典型例子,它们都有广泛的工程应用背景。
2.5.1 旋转失衡引起的强迫振动 2.5.2 支承运动引起的强迫振动
2.5.4 惯性式测振仪原理 2.5.5 转轴的横向振动
2.5.3 隔振原理
以z=x-y代入可得:
设壳体做简谐运动: 代入后可得:
这个方程的解为:
式中,相对位移幅值:
相对位移z与被测结构位移的相位差: 与前面提到的旋转失衡引起的强迫振动结果是相似的。 它们的幅频特性图:
在实际应用中,选取不同 的频率比和阻尼比,可使 测振但测量不同的振动参 数。测振仪本身的主要性 能参数有:灵敏度、测量 精度、测量频率范围等等。
2.5.1 旋转失衡引起的强迫振动
在旋转机械中,旋转失衡是使系统振动的外界激励的主要 来源。旋转失衡的原因:高速旋转机械中转动部分的质量 中心与转轴中心不重合。
这里只考虑竖直方向的振动,水平 方向的失衡力已被水平支承平衡。
这是一个弹簧/质量/阻尼器振动系统, 系统总质量为M,由弹簧和阻尼器 支承。失衡质量为m(与转轴中心的 距离为e)失衡量me。m以角速度ω旋 转,非旋转部分x+esinωt,根据牛 顿第二定律有:
整理得:
复数
的虚部表示系统受到的竖直方向的失衡力
激励,实部代表的水平方向的失衡力激励已被水平支承所 平衡。
上述方程的稳态解形式:
激励的幅值为:
静位移为:
因此,稳态响应为:
其中:旋转失衡时响应的振幅 激励与响应的相角 类似放大因子的无量纲比值:
旋转失衡引起的强迫振动 一样的
简谐激励下的幅/相频特性曲线
河科大振动力学-第二章

非齐次微分方程 通解
=
齐次微分方程 通解
+
非齐次微分方程 特解
持续等幅振动
有阻尼自由振动 逐渐衰减
稳态解
稳态响应
瞬态解
瞬态响应
单自由度线性系统的强迫振动 系统的全解为:
x(t ) Cent cos(d t ) A H () cos(t )
有阻尼自由振动的解 瞬态解 瞬态响应 逐渐衰减 稳态振动的解 稳态解 稳态响应 持续等幅振动
描述了振动位移、激励间的相位差与激励频率之 间的函数关系,称之为相频特性。 下图为不同阻尼率时的相频特性曲线,图中横坐 标为 / n ,即频率比:
单自由度线性系统的强迫振动
单自由度线性系统的强迫振动 从相频特性曲线可以看到: (1)当 n 时, ( ) 0 ,即位移与激振力在相位 上几乎相同。
H (2)当 n 时, () 1 , 且 / n 时, () 0 H 说明高频响应的振幅很小。
单自由度线性系统的强迫振动 (3)当 n 和 n 时 对应于不同 值,曲线较为密集,说明阻尼的影响不显著
单自由度线性系统的强迫振动 (4)当 n 时, H () 出现峰值。阻尼率较大时,H ()
单自由度线性系统的强迫振动 从相频特性曲线可以看到: (2)当 n 时, () ,即位移与激振力在相位 上几乎相反。
单自由度线性系统的强迫振动 从相频特性曲线可以看到: (3)相位差随着频率比的增大而逐渐增大。阻尼对相 位差的影响表现为:当频率比<1时,相位差随阻尼率的增 大而增大;而当频率比>1时,相位差随阻尼率的增大而减 小。但当 n 时总有 / 2 ,这时相位差与阻尼率 值的大小无关。工程中常将 / 2 当做判断共振的依据 。
汽车振动分析之 单自由度

tg
2 1 2
简谐激励下的强迫振动稳态响应解为:
x2(t)
B0 sin(t ) (1 2)2 (2)2
简谐激励下的强迫振动稳态响应解为:
x2 (t)
B0 sin(t ) (1 2 )2 (2)2
强迫振动稳态响应的基本特点:
1、系统在简谐激励的作用下,其强迫振动稳态响应是简谐振动, 振动的频率与激励频率相同。
2.1 简谐激励引起的强迫振动
简谐激振力 f (t) P0 sin t
P 激振力幅值 0
激振力圆频 率
mx cx kx P0 sin t
令: p2 k , 2p c
m
m
x 2px p2x P0 sin t
m
x(t) x1(t) x2 (t)
通解 特解
通解:x1 ent (C1 cos pdt C2 sin pdt)
另一种形式 x Aent sin( pdt )
振幅
初 相
A
x02
(v0
nx0 )2 pd2
位 角
tan x0 pd
v0 nx0
Aent 为阻尼振动振幅
这种情形下,自由振动不是等幅简谐振动,是按负指数衰减的
衰减运动。衰减运动的频率为 pd,衰减速度取决于衰减系数n即
zp。当t→∞时,x→0,即振动最终将完全消失,如图。
程为: mx cx kx 0
x c x k x 0 mm
令 2n c p2 k
m
m
m x
c k
d2 x dt2
2n
dx dt
p2x
0
n c 2m
称为衰减系数
Hale Waihona Puke n 称为相对阻尼系数p
第四节简谐激励振动理论的应用讲解

第四节 简谐激励振动理论的应用一、 旋转不平衡质量引起的强迫振动 (一)运动方程及其解在高速旋转机械中,偏心质量产生的离心惯性力是主要的激励来源之一。
一个旋转机械的力学模性:设旋转机械总质量为M ,转子的偏心质量为m ,偏心距为e ,转子的转动角速度为ω。
选静平衡位置为坐标原点,坐标x 表示机器离开静平衡位置的垂直位移,而偏心质量的位移为sin x e t ω+根据牛顿运动定律,列出系统的振动微分方程2222()(sin )d x d dxM m m x e t c kx dt dt dtω-++=--整理后,得2sin Mx cx kx me t ωω++= (3-18)上式的形式与方程(3-1)相似,只是由2me ω代替了0F ,故前面所有的分析都可适用。
设n ω=, 2n c M ζω= , nr ωω=则方程(3-18)的稳态响应为()sin()x t X t ωϕ=-式中振幅X 为2221me X me kme r M ωω===显然,相位差ϕ为2221c rtg k m rωζϕω==-- 可见,偏心质量引起的强迫振动的振幅与不平衡质量me 成正比。
为了减小振动,旋转机械的转子通常要作平衡试验,使质量分布尽可能均匀。
(二)幅频特性放大因子定义为2MX rme = (3-19)以放大因子MX me为纵坐标,频率比r 为横坐标,阻尼比ζ为参数,画出幅频特性曲线。
1.02.3.4.0MX me由曲线可见:1. 当0nr ωω=→时,0MX me →,即振幅接近于零。
2. 当1nr ωω=>>时,1MX me →,即振幅趋近于常数,即 meX M≈而与激励频率及阻尼比基本上无关。
3. 共振发生在1r =即ωω=时,位于1r=的右边,共振振幅为1me X M =当阻尼很小时(0.2ζ≤),可以认为当1r = 即 n ωω=发生共振,共振振幅为2me me X M cωζ==安放在机器正上方,以测定机器的振动特性。
简谐振动:受迫振动和共振

受迫振动:电磁场中的电荷在 电场和磁场中的受迫振动
共振:电磁场中的电荷在电场 和磁场中的共振
应用:电磁学中的简谐振动、 受迫振动和共振在电磁波传播、 电磁场分析等方面的应用
生物学和医学中的简谐振动、受迫振动和共振
心脏跳动:心脏的收缩和舒张是一种简谐振动,受神经和激素的调节。
呼吸运动:呼吸过程中,肺的扩张和收缩也是一种简谐振动,受自主神经系统的调节。
受迫振动的相位 与外力的相位有 关,当外力与物 体的固有频率相 同时,相位差为 0,产生共振。
受迫振动的频率 和振幅都会随着 外力的变化而变 化,当外力消失 时,振动也会停 止。
4
共振现象及其应用
共振现象的定义
共振现象:当外 界驱动力的频率 与系统的固有频 率相同时,系统 振动幅度达到最 大,这种现象称 为共振。
利用共振原理进行结构分析和优 化
未来研究和发展的方向
研究新的控制和利用简谐振动、 受迫振动和共振的方法与策略
研究简谐振动、受迫振动和共振 对环境和生态的影响
添加标题
添加标题
添加标题
添加标题
探索简谐振动、受迫振动和共振 在工程、科技、生活中的应用
研究简谐振动、受迫振动和共振 与其他物理现象的相互作用和影 响
关。
共振原理:当驱动力的频 率与系统的固有频率接近 时,系统振动幅度迅速增 大,这种现象称为共振放
大。
共振应用:共振现象在工 程、建筑、机械、电子等 领域有广泛应用,如地震 监测、桥梁设计、机械调
谐等。
共振现象的应用
建筑结构:利用 共振原理进行建 筑设计,提高建 筑的稳定性和安 全性
机械设备:利用 共振原理进行机 械设备的优化设 计,提高设备的 工作效率和寿命
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
k o Fk
Δ
x
c
F Fc
m
mg
Solution
The equation of motion: 5 x 2 0 0 0 x 1 0 s in 2 0 t
n
2000 20 rad/s 5
简谐激励下强迫振动的响应特性
例 (1)
Particular solution:
x 2 t tc 1 c2 o t c 0 2 s s2 itn 0
2
Φarctan
1
2
1
12 2 22
X0 k
F0
12 222
简谐激励下强迫振动的响应特性
简谐激励下强迫振动的响应特性
振幅达到最大值时的频率
'
12
1
2 22
212 282
2
12
2
22
3
0
12 22 0
2 12 2
122 1
d 12 122 n
max1122214212221 12
简谐激励下强迫振动的响应特性
例 (2)
问题描述
k
c
Fk
如 右 图 所 示 的 单 自 由 度 系 统 : m=5kg, o Δ
c=20 Ns/m, and k=2000 N/m.
x
F Fc
m
•(1)当外激励 F(t)=10sin(10t)(N), 求系统的稳态响 mg
应x2(t)=?
•(2)当 F(t)=10sin(10t)(N),而所有的初值条件为零, 即 x(0)=dx(0)/dt=0,求瞬态解及总响应 x(t)?
简谐激励下强迫振动的响应特性
例 (2)
问题 2,总响应的最终形式
x t e 2 t0 . 8 7 c o s 1 9 . 9 t 3 . 2 s i n 1 9 . 9 t 6 .6 1 s in 1 0 t 0 .1 3 3 m m
3 . 3 2 e 2 tc o s 1 9 . 9 t 1 . 3 1 6 . 6 1 s i n 1 0 t 0 . 1 3 3 m m
x 2 t 6 . 6 1 s i n 1 0 t 0 . 1 3 3
简谐激励下强迫振动的响应特性
m m
例 (2)
问题 2,求瞬态响应
x1
x t e 2 tA c o s d t B s i n d t 6 . 6 1 s i n 1 0 t 0 . 1 3 3
0 A 6 . 6 s 0 1 i . 1 n , 3 A 6 . 6 s 3 0 . 1 1 i 0 n . 8 3 m 7 3
(Inertia domination)
(外力主要与惯性力平衡)
Φarctan2 1 2
1
12 2 22
X0 k
F0
12 222
简谐激励下强迫振动的响应特性
稳态响应的共振特性
1 , 2 1 ,
, 2
X 0 k F 2 0 c F 0
(Damping domination)
(共振时,外力与阻尼力平衡,惯性力与弹性力平衡)
其中, x h (t) 为相应齐次方程的解
瞬态响应
(有阻尼系统中该项解将逐渐消失)
x p (t) 为方程的特解 稳态响应
简谐激励下强迫振动的响应特性
振动的时域波形
简谐激励下强迫振动的响应特性
一、无阻尼情形
无阻尼情形的运动方程
瞬态解的一般形式:
稳态解的一般形式: 代入运动方程,得到振幅:
因此,总振动的一般形式为:
简谐激励下强迫振动的响应特性
激励频率与固有频率接近
拍振周期:两零幅值点或最大幅值点对应的时间
b
2 2
2 n
拍频: b 2 n
(or : fb fn f )
简谐激励下强迫振动的响应特性
拍的现象
简谐激励下强迫振动的响应特性
拍的现象
mxkxF0si nt
we have ωn-ω=2ε
m 1, k1, F01
令两边同谐波项相等
幅频特性 相频特性
简谐激励下强迫振动的响应特性
无量纲化
式中:
振幅放大系数(幅值比)
简谐激励下强迫振动的响应特性
力函数和响应相位差
简谐激励下强迫振动的响应特性
稳态响应的相位特性
Force Excitation
F(t) Restoring
kx
Damping
cx
Inertia
m x2
•当 t = 1 s, 2 s, 3 s时,瞬态响应x1(t) 的幅值及稳态 响应 x2(t)的幅值
简谐激励下强迫振动的响应特性
例 (2)
建模
建立广义坐标。取质量元件沿 铅垂方向的位移作为广义坐标 x。原点在系统的静平衡位置, 向下为正。
k
Fk
oΔ x
c
F Fc
m
mg
作受力分析图
m xcx kxF0sint
t=2s, Amplitude of x1 = 0.061mm
衰减
t=3s, Amplitude of x1 = 8×10-3mm
简谐激励下强迫振动的响应特性
稳态解的分段响应特性
简谐激励下强迫振动的响应特性
简谐激励下强迫振动的响应特性
简谐激励下强迫振动的响应特性
总响应
简谐激励下强迫振动的响应特性
共振
此时 由罗比塔法则
x(t)x0co sn t 简谐x 激0 n 励下si强n 迫振动n 的t响 应特性st2n tsinn t
简谐激励下强迫振动的响应特性
Amplitude F0
kX0 cωX0 mω2X0
Phase Angle 0o
Lag F(t)
Φ
Exceed x (t) 90o
Exceed x (t) 180o
Vector relationship
简谐激励下强迫振动的响应特性
稳态响应的低频特性
若 r X 0
st
Vector relationship
x00 A0 x t 2 0 B c o s 2 0 t 0 . 0 5 c o s 2 0 t t s i n 2 0 t x00 B0.050.0025(m )
20
Hence, the complete response of the undamped system is
x t 0 .0 0 2 5 s i n 2 0 t 0 .0 5 tc o s 2 0 tm
相位差反映响应相对于激励力的滞后效应,是由系统
本身具有阻尼引起的。
简谐激励下强迫振动的响应特性
相频曲线
简谐激励下强迫振动的响应特性
系统总响应为:
总响应
式中 为阻尼系统的瞬态响应,与自由振动的表达式相同。 因此欠阻尼系统的总响应为:
其中瞬态响应的幅值 和相位 可通过将初始条件代入上 式予以确定,即联立求解以下方程获得:
简谐激励下强迫振动的响应特性
放大系数与静位移
总振动方程中代入初始条件,可求得待定常数
得到总振动的表达式
稳态解的振幅 X 通常可表达成
X1 st 1 r 2
X
振幅放大系数(幅值比)
其中: st F0 / k r /n
静位移 无量纲频率比
简谐激励下强迫振动的响应特性
无阻尼系统幅频特性
简谐激励下强迫振动的响应特性
简谐激励下强迫振动的响应特性
例(1)
The solution: x t 0 .0 0 2 5 s i n 2 0 t 0 .0 5 tc o s 2 0 tm
详细推导
简谐激励下强迫振动的响应特性
稳态 和瞬 态问 题!!
全解!
二、有阻尼情形
运动方程一般形式 假设稳态解形式并代入运动方程得
用三角函数公式展开
代入 m=5kg, c=20Ns/m, 简an谐d激励k=下2强0迫0振0动N的/响m应.特性
Fk F Fc
m mg
例 (2)
F(t)=10sin(10t) , 求频率及放大系数
n
k 20 (rad/s) m
c 20 0.1
2 mk 200
10 0.5
20
dn 1219.9(rad/s)
mg
Substitute above equations in equation of motion to obtain
2 c 1 s 0 2 t i c 2 0 c n 0 2 t o 2 0 t c 1 s c 0 2 t o c 0 2 s 0 2 t s i 0 2 n 0 t c 1 c 0 2 t o c 0 2 s 0 2 t s i 0
x t 2 e 2 t A co d t s B sid n t e 2 t Adsid n t Bdco d t s6.1 c 6o 1t s 0 0 .133
0 2 A 1.9 9 B 6.1 6 c0 o .1s33
B 2 A 6.1 6 c0 o .1s3 /1.3 9 9 3 .2 mm
1 1 m ax 2 简谐激励下强迫振动的响应特性
振幅达到最大值时的频率
1 2 2 1 n peak d n
d 12 122 n
受迫振动峰值并不出现在阻尼 系统的固有频率处,峰值频率 略向左偏移, 对于小阻尼 ζ (i.e.,
for light damping).
1 peak d n
激励频率与固有频率接近
Case 4: ωn ≈ ω
设 x0 x0 0 ,则:
令 n 2 , 为一小正数。则:
n 2 n 2
简谐激励下强迫振动的响应特性
n22 4
激励频率与固有频率接近