基于DSP控制的数字移相器
一种精度可调的数字控制移相原理.

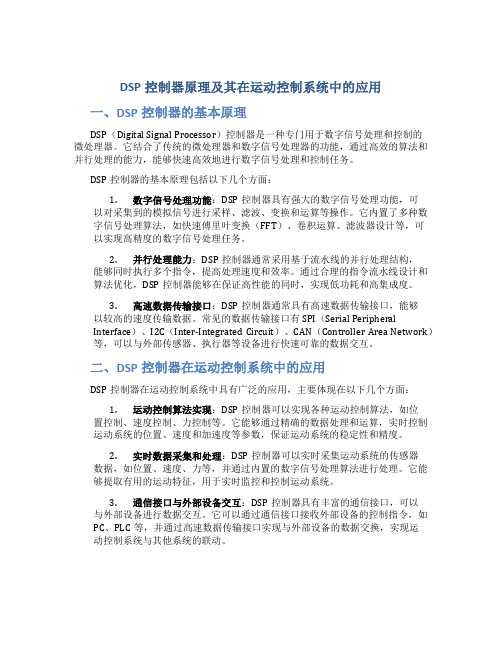
一种精度可调的数字控制移相原理1 引言移相2基本原理本系统是基于数字倍频器进行延时操作而实现的移相。
实现原理是把输入模拟波形(如正弦信号)的周期Tin转化为原来的1/data,Tin/data即为移相精度,data值通过精度控制输入信号赋值。
当data为360时,精度为1°;当data为720时,精度为0.5°;若要更小的精度,可依此类推。
本文中为便于显示移相波形,把精度设置为1°。
则精度为Tin/360,所用的倍频器倍频因子即为360。
这样经n个Tin/360延时(n为移相的具体数值,由记时控制输入信号D赋值),再输出波形。
和原波形相比就形成了移相。
从实现的电路方面来讲,要把输入波形周期变为原来的1/360,或者说把输入波形的频率变为原来的360倍,最直接的办法就是采用倍频器。
而数字倍频器的输入是数字信号,则应先把模拟量转化为数字量,这就需要一个模拟比较器。
在得到倍频输出信号后,为了要得到希望的n值,还应在倍频器后添加数字定时输出计数器,以输出延时控制信号。
最后把模拟信号输入A/D电路,通过ROM存储,再在延时控制信号的作用下延时输出数字量,再经过D/A电路还原为模拟量,最终实现移相操作。
其中倍频器具有360倍倍频能力。
输入模拟信号(如正弦波)经过信号比较器,波形电压与零伏比较后,高于零伏的电压段转化为高电平,低于的转化为低电平,这样输入信号就转化为周期相同的数字信号。
A/D,ROM,D/A和一些控制电路构成移相输出控制模块。
其中移相控制部分的倍频器,定时输出计数器构成可编程数字控制部分,都可以通过硬件语言编译实现。
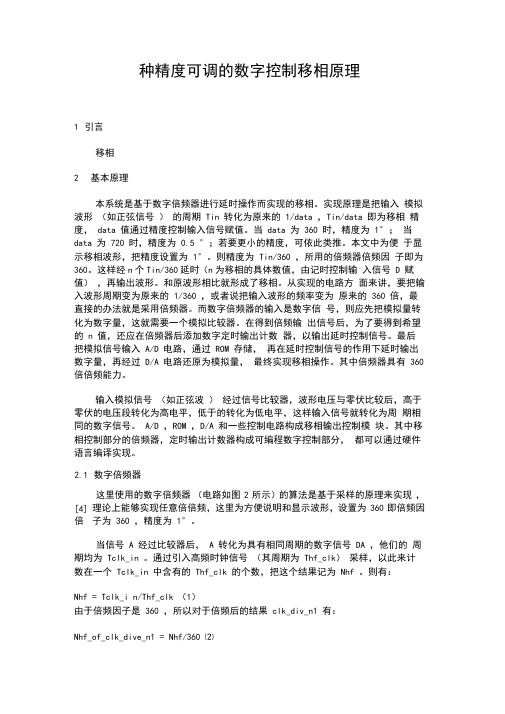
2.1数字倍频器这里使用的数字倍频器(电路如图2所示)的算法是基于采样的原理来实现[4],理论上能够实现任意倍倍频,这里为方便说明和显示波形,设置为360倍,即倍频因子为360,精度为1°。
当信号A经过比较器后,A转化为具有相同周期的数字信号DA,他们的周期均为Tclk_in。
dsp控制的原理及应用pdf

DSP控制的原理及应用1. DSP控制的基本原理DSP(数字信号处理)是一种基于数字技术的信号处理方法,通过将连续信号转换为离散信号,以实现信号的处理和分析。
在控制系统中,DSP控制是一种使用数字信号处理技术进行控制的方法。
其基本原理包括以下几个方面:1.1 数字信号处理数字信号处理是将模拟信号转换为数字信号,并对数字信号进行处理的过程。
通过采样、量化和编码等步骤,将连续的模拟信号转换为离散的数字信号。
在DSP 控制中,数字信号处理用于对系统信号进行采样和分析,并生成控制信号。
1.2 控制算法控制算法是DSP控制中的核心部分。
通过对输入信号进行分析和处理,可以根据系统的要求生成控制信号。
常用的控制算法包括PID控制算法、模糊控制算法和自适应控制算法等。
这些算法可以根据具体的系统需求来选择和应用。
1.3 数字滤波数字滤波是DSP控制中常用的方法之一。
通过滤波器对输入信号进行滤波处理,可以去除噪声和干扰,获得更加准确的控制信号。
常用的数字滤波器有低通滤波器、高通滤波器和带通滤波器等。
1.4 调制和解调调制和解调是在DSP控制中经常使用的技术。
通过调制技术,可以将信号转换为适合传输的形式。
解调技术则将传输的信号转换回原始的信号形式。
调制和解调技术可以应用于传感器信号的采集和控制信号的输出。
2. DSP控制的应用DSP控制在各个领域中有广泛的应用。
下面列举了几个常见的领域及其应用:2.1 电力系统•电力系统的数字化控制: DSP控制可以应用于电力系统的数字化控制,通过对电力系统信号的采集和处理,实现电力系统的稳定运行和故障检测。
2.2 通信系统•无线通信系统: DSP控制可以应用于无线通信系统中的信号处理和调制解调技术,提高通信质量和传输速率。
2.3 汽车电子控制系统•发动机控制: DSP控制可以应用于汽车发动机控制系统中,通过对传感器信号的采集和处理,进行发动机的调节和控制。
2.4 工业自动化•数字化控制系统: DSP控制可以应用于工业自动化系统中的数字化控制,提高生产效率和质量。
dsp控制器原理及其在运动控制系统中的应用
DSP控制器原理及其在运动控制系统中的应用一、DSP控制器的基本原理DSP(Digital Signal Processor)控制器是一种专门用于数字信号处理和控制的微处理器。
它结合了传统的微处理器和数字信号处理器的功能,通过高效的算法和并行处理的能力,能够快速高效地进行数字信号处理和控制任务。
DSP控制器的基本原理包括以下几个方面:1.数字信号处理功能:DSP控制器具有强大的数字信号处理功能,可以对采集到的模拟信号进行采样、滤波、变换和运算等操作。
它内置了多种数字信号处理算法,如快速傅里叶变换(FFT)、卷积运算、滤波器设计等,可以实现高精度的数字信号处理任务。
2.并行处理能力:DSP控制器通常采用基于流水线的并行处理结构,能够同时执行多个指令,提高处理速度和效率。
通过合理的指令流水线设计和算法优化,DSP控制器能够在保证高性能的同时,实现低功耗和高集成度。
3.高速数据传输接口:DSP控制器通常具有高速数据传输接口,能够以较高的速度传输数据。
常见的数据传输接口有SPI(Serial PeripheralInterface)、I2C(Inter-Integrated Circuit)、CAN(Controller Area Network)等,可以与外部传感器、执行器等设备进行快速可靠的数据交互。
二、DSP控制器在运动控制系统中的应用DSP控制器在运动控制系统中具有广泛的应用,主要体现在以下几个方面:1.运动控制算法实现:DSP控制器可以实现各种运动控制算法,如位置控制、速度控制、力控制等。
它能够通过精确的数据处理和运算,实时控制运动系统的位置、速度和加速度等参数,保证运动系统的稳定性和精度。
2.实时数据采集和处理:DSP控制器可以实时采集运动系统的传感器数据,如位置、速度、力等,并通过内置的数字信号处理算法进行处理。
它能够提取有用的运动特征,用于实时监控和控制运动系统。
3.通信接口与外部设备交互:DSP控制器具有丰富的通信接口,可以与外部设备进行数据交互。
基于DSP+CPLD的LLC谐振变换器的研究

基于DSP+CPLD的LLC谐振变换器的研究作者:胡显玉来源:《数字技术与应用》2017年第09期摘要:本文介绍了一种基于DSP+CPLD配合控制的LLC谐振全桥变换器,采用移相控制和调频控制相结合的方法,使得输出电压在全范围内可调。
该设计方法能有效地减小变换器的体积,提高变换器的效率。
并且控制回路具有功率器件驱动、保护和外部通讯功能。
最后,在一台输入为DC 620(1±2.5%)V,输出为DC 400V/2694W的原理样机上验证了该混合控制方法的可行性以及电路参数设计的正确性。
关键词:LLC谐振变换器;移相;调频;混合控制中图分类号:TM46 文献标识码:A 文章编号:1007-9416(2017)09-0080-04舰船磁场的存在威胁其生存,为了提高舰船的隐身性能,必须对其进行消磁。
消磁电源是一个分布式系统[1],因其可靠性高、损耗低、易维护等优点而被广泛采用。
然而消磁电源中的第二级DC-DC变换器是消磁电源的核心部分,为了减小电源的体积和重量,DC-DC变换器的高频化、高效率和高功率密度已成为一种发展趋势。
由于传统变换器的开关器件工作在硬开关状态下,开关频率的升高导致开关损耗的增加,这样降低了变换器的效率,不利于开关的高频化。
而LLC谐振全桥变换器凭借自身的高频率、高效率、高功率密度等优点已经在电气领域得到了广泛应用。
LLC谐振变换器在负载或者输入电压变化时,能很好地调节输出电压,起到稳定输出电压的作用[2-3]。
控制部分是基于DSP+CPLD的混合控制策略,在同一变换器中使用调频和移相两种控制模式,并且这两种控制模式能平稳地切换和过渡。
工作中变换器根据指令需求调整电压的输出,选择性地工作在调频模式或者移相模式下,实现了输出电压在全范围内任意可调。
1 LLC谐振变换器的工作原理图1为LLC谐振全桥变换器的电路原理图。
逆变电路有4个MOSFET开关管(Q1、Q2、Q3、Q4)构成,其中D1~D4与C1~C4分别为MOS管的体二极管和寄生电容,谐振电感Lr、谐振电容Cr、励磁电感Lm组成了谐振网络部分,DR1、DR2组成了全波整流电路,Cf 为滤波电容。
一种精度可调的数字控制移相原理.
种精度可调的数字控制移相原理1 引言移相2 基本原理本系统是基于数字倍频器进行延时操作而实现的移相。
实现原理是把输入 模拟波形 (如正弦信号 ) 的周期 Tin 转化为原来的 1/data ,Tin/data 即为移相 精度, data 值通过精度控制输入信号赋值。
当 data 为 360 时,精度为 1°; 当 data 为 720 时,精度为 0.5 °;若要更小的精度,可依此类推。
本文中为便 于显示移相波形,把精度设置为 1°。
则精度为 Tin/360 ,所用的倍频器倍频因 子即为360。
这样经n 个Tin/360延时(n 为移相的具体数值,由记时控制输 入信号 D 赋值) ,再输出波形。
和原波形相比就形成了移相。
从实现的电路方 面来讲,要把输入波形周期变为原来的 1/360 ,或者说把输入波形的频率变为 原来的 360 倍,最直接的办法就是采用倍频器。
而数字倍频器的输入是数字信 号,则应先把模拟量转化为数字量,这就需要一个模拟比较器。
在得到倍频输 出信号后,为了要得到希望的 n 值,还应在倍频器后添加数字定时输出计数 器,以输出延时控制信号。
最后把模拟信号输入 A/D 电路,通过 ROM 存储, 再在延时控制信号的作用下延时输出数字量,再经过 D/A 电路还原为模拟量, 最终实现移相操作。
其中倍频器具有 360 倍倍频能力。
输入模拟信号 (如正弦波 ) 经过信号比较器,波形电压与零伏比较后,高于 零伏的电压段转化为高电平,低于的转化为低电平,这样输入信号就转化为周 期相同的数字信号。
A/D ,ROM ,D/A 和一些控制电路构成移相输出控制模 块。
其中移相控制部分的倍频器,定时输出计数器构成可编程数字控制部分, 都可以通过硬件语言编译实现。
这里使用的数字倍频器 (电路如图 2 所示)的算法是基于采样的原理来实现 ,理论上能够实现任意倍倍频,这里为方便说明和显示波形,设置为 360 即倍频因子为 360 ,精度为 1°。
基于DSP的电源数字控制研究毕业设计(论文)

学科门类:工学学校代码: 10287中图分类号:TM464 密级:公开硕士学位论文基于DSP的电源数字控制研究I目录摘要微电子集成技术的发展为电力电子控制技术提供了新的思路,由六十年代的分立元件发展到后来的集成电路、大规模集成电路、微处理器等,为功率变换的控制带来了极大的方便。
由此产生的数字控制方法因其可重复性强、耐用性强、适应性强等优点,越来越受到人们的重视。
本文采用数字信号处理器DSP建立数字控制平台,将开关电源的控制数字化,取得了良好的控制效果。
本文的主体由三个部分组成,分别在第二、三、四章进行阐述。
第二章介绍了DSP芯片的产生发展,对不同生产厂家生产的DSP芯片性能做了详细的介绍。
本文主要使用了两种DSP芯片,分别为Motorola公司的DSP56F8323和TI公司的TMS320LF2407A。
第二章在介绍过芯片性能之后,又分别就两种芯片的外围电路设计做了详细的介绍。
最后对两种芯片的性能做了分析对比。
第三章主要介绍单相功率因数校正的数字控制方法。
首先简单总结了谐波污染对电网的危害,指出了功率因数校正的必要性,并且介绍了目前常用的功率因数校正控制方法。
其次对单相功率因数校正功率电路中的主要元器件参数进行了设计和选择。
最后建立了单相Boost PFC电路的数学模型,介绍了数字调节器的设计方法,并进行了仿真和实验验证。
第四章主要介绍三电平逆变器的数字控制方法。
首先,分析介绍了空间矢量控制在三相三电平逆变器控制中的应用,采用了一种简单的空间矢量算法,简化了实时计算。
然后分析了不同空间矢量对直流电容电压的影响,提出了一种直流侧电容电压平衡的方法。
最后对提出的算法进行了仿真验证。
第一章为绪论,主要介绍了电力电子技术,电源控制技术,以及数字控制技术的发展情况,介绍了课题的研究背景和研究目的。
第五章为全文小结,总结了整个课题的研究内容,并提出课题的沿继研究工作设想。
关键词:数字控制,数字信号处理器,功率因数校正,三电平逆变器,空间矢量控制AbstractThe development of microprocessor provides a new method for switching mode power supply control —digital control. Digital control has many advantages such as repeatability, durability, adaptability and so on. This thesis focuses on the study, implementation and improvement of a DSP based digital controller.This thesis mainly includes three parts, which are described in detail in chapter 2, chapter 3, and chapter 4 respectively.Chapter 2 introduces the development of DSP chips. There are two kinds of DSP chip used in this thesis —Motorola’s DSP56F8323 and TI’s TMS320LF2407A. The hardware design of these two DSP chips is described in this chapter and the performance of these two DSP chips is compared at the end of this chapter.Chapter 3 focuses on the digital control of Power Factor Corrector (PFC). First, the damages of low power factor and the importance of PFC are presented. Secondly, the main parts of the hardware are designed and selected. Last, the control-to-output transfer function of Boost PFC converter is found. The parameters of digital adjuster are calculated. Simulink and experiment results prove the correction of the design.Chapter 4 focuses on the theory of Voltage Space Vector Pulse Width Modulation (SVPWM) and its control strategy. A fast space vector modulation algorithm for 3-level 3-phase converter is also described in this chapter. Simulink results prove the correction of the control strategy.Keywords: digital control, Digital Signal Processor, PFC, 3-level inverter, Space Vector ModulationIII目录目录第一章绪论 (1)1.1电力电子技术概述 (1)1.2数字信号处理概述 (2)1.3课题背景和研究目的 (2)1.4本文研究的主要内容 (3)第二章数字控制器的原理及硬件构成 (5)2.1引言 (5)2.2DSP芯片的概述 (5)2.3DSP56F8323芯片及其外围电路设计 (7)2.3.1 DSP56F8323芯片介绍 (7)2.3.2 DSP56F8323外围电路设计 (9)2.3.2.1 供电电路 (9)2.3.2.2 BDM调试工具 (10)2.3.2.3 复位电路 (11)2.3.2.4 串口电路 (11)2.4TMS320LF2407A芯片及其外围电路设计 (11)2.4.1 TMS320LF2407A芯片介绍 (11)2.4.2 TMS320LF2407A外围电路设计 (13)2.4.2.1 供电电路 (13)2.4.2.2 时钟电路 (14)2.4.2.3 存储器接口电路 (14)2.5本章小结 (15)第三章数字功率因数校正 (19)3.1引言 (19)3.2功率因数和功率因数校正(PFC) (20)3.3B OOST PFC电路的控制方法 (21)3.4数字PFC硬件电路设计 (23)3.4.1 PFC主功率电路的拓朴结构 (23)3.4.2 主功率电路元件参数设计与选择 (24)3.4.2.1 设计要求 (24)3.4.2.2 升压电感设计 (24)3.4.2.3 输出电容选择 (25)3.4.2.4 功率管开关管和二极管的选择 (25)3.4.3 数字控制器硬件资源分配 (26)3.5B OOST PFC数字控制器设计 (27)3.5.1 电压环设计 (28)3.5.1.1 设计目标 (28)3.5.1.2 电压环功率级的数学模型 (29)3.5.1.3 电压环数学模型的离散化 (31)的计算 (32)3.5.2 前馈电压Vff3.5.3 电流环设计 (34)3.5.3.1 电流环功率级数学模型 (35)3.5.3.2 电流环数学模型的离散化 (35)3.5.4 数字PI调节器 (36)3.5.5 软件方案设计 (39)3.6仿真与实验 (41)3.6.1 MATLAB仿真 (41)3.6.2 系统实验 (43)3.7本章小结 (46)第四章三电平逆变器的数字控制 (48)4.1引言 (48)4.2空间矢量三电平逆变器的控制方法 (49)4.2.1 三电平逆变器的工作模式 (49)4.2.2 空间矢量调制 (53)4.3直流侧电压平衡 (57)4.4硬件设计 (60)4.4.1 逆变桥主电路设计 (60)4.4.2 箝位二极管的选择 (61)4.4.3 输出滤波器设计 (61)4.4.4 功率模块驱动隔离电路 (62)4.5仿真及试验结果 (62)4.6本章小结 (64)第五章结束语 (66)5.1全文小结 (66)5.2进一步工作展望 (66)参考文献 (68)攻读硕士期间发表的论文 (71)致谢 (72)V南京航空航天大学硕士学位论文第一章绪论1.1 电力电子技术概述[1],[2],[3]电力电子技术(Power Electronics)是二十一世纪重要的关键技术之一。
基于数字信号处理器控制的新型全桥移相式零电压零电流开关PWM DC-DC变换器
基于数字信号处理器控制的新型全桥移相式零电压零电流开关
PWM DC-DC变换器
孙铁成;王高林;汤平华;张学广
【期刊名称】《中国电机工程学报》
【年(卷),期】2005(25)18
【摘要】针对传统的全桥移相式零电压零电流开关(ZVZCS)PWM DC-DC变换器在实现滞后桥臂开关管零电流开关(ZCS)的过程中,存在着辅助谐振电路附加损耗较大、软开关实现方式复杂以及功率开关管电压和电流应力高等缺点,提出了一种通过辅助无源钳位网络来实现软开关的新型全桥ZVZCS PWM DC-DC变换器。
分析了变换器的软开关实现原理,并采用TMS320F240 DSP作为控制芯片,设计了变换器数字控制系统。
通过一台0.8kW,60kHz的样机验证了这种基于数字控制的软开关变换器相关理论的正确性。
【总页数】5页(P46-50)
【关键词】电力电子;DC-DC变换器;零电压零电流开关;无源钳位;数字控制;数字信号处理器
【作者】孙铁成;王高林;汤平华;张学广
【作者单位】哈尔滨工业大学电气工程系
【正文语种】中文
【中图分类】TM46
【相关文献】
1.带辅助电感的全桥移相零电压零电流PWM软开关变换器的设计 [J], 刘生华;张忠相;
2.一种新型零电压零电流开关移相全桥变换器 [J], 王光;余明友;朱忠尼;金建伟
3.一种辅助电流可控的移相全桥零电压开关PWM变换器 [J], 张欣;陈武;阮新波
4.对移相控制零电压开关PWM全桥直流变换器的新型理论分析方法 [J], 许大宇;阮新波;严仰光
5.一种新型全桥移相PWM零电压零电流变换器 [J], 姚建红;张艳红;刘继承
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP2812的便携式数字试验电源的研制
基于DSP2812的便携式数字试验电源的研制作者:张祖伟刘明坤李玉庆来源:《山东工业技术》2015年第04期摘要:针对机车车辆、电力设施与智能控制装置等检修时需测试其各种开关器件(如继电器、接触器)的性能,特研制以TMS320F2812 DSP为控制核心,移相全桥ZVZCS PWM变换器为主电路拓扑,引入PI控制调节算法,采用电压外环电流内环的双闭环控制的试验电源。
关键词:ZVZCS变换器;试验电源;TMS320F2812机车车辆、电力设施与智能控制装置的检修都需对其开关器件的性能进行测试,看其在允许范围内能否正常工作,本电源针对此项工作研制,既可以作为试验电源测试装置80%电源电压特性使用,又可作为测试继电装置的启动性能使用,还可作为开关电源使用,不仅降低了劳动强度和操作复杂性,而且大大提高了工作效率。
1 系统硬件设计1.1 技术参数电源输入:单相交流220V±10%,50HZ;输出直流电压:0~120V;输出电流:0~20A;开关频率:100KHZ;整机效率:η ≥90%。
1.2 主功率电路主电路拓扑结构采用移相全桥ZVZCS变换器,由输入不可控整流滤波电路、ZVZCS逆变桥、高频变压器和全波输出整流滤波电路等组成,具有低损耗高效率的特性。
输入的交流市电经EMI滤波器整流滤波得到脉动的直流电,经ZVZCS PWM变换电路[1]后再整流滤波得到所需的直流电。
闭环控制回路由采样电路把采集到的电压电流信号送入DSP主控制器中,并与基准值比较,依据比较结果采用PI算法调节PWM信号输出,进而来控制功率开关管IGBT的开关,以此来达到输出稳定电压电流的目的。
1.3 控制电路1.3.1 采样电路设计采用LEM公司LV28-P、LA28-NP霍尔传感器[2]。
测电压时原边串联一个较大的电阻,从而把电压信号变成了电流信号,副边将会感应出相应电流,当副边电流通过采样电阻时产生压降,进而映射出需检测电压或电流的大小,并实现了电气隔离。
fpga载波移相控制算法
fpga载波移相控制算法FPGA载波移相控制算法引言在现代通信系统中,尤其是在无线通信系统中,载波移相控制算法(Carrier Phase Shift Keying, CPSK)起着至关重要的作用。
它是一种基于相移键控调制技术的调制方式,通过改变载波相位来传输数字信息。
在FPGA(Field Programmable Gate Array)这样的可编程逻辑器件中,实现载波移相控制算法可以提供高性能和灵活性。
本文将详细介绍FPGA载波移相控制算法的原理与实现步骤。
一、FPGA载波移相控制算法原理1. DPSK原理在了解FPGA载波移相控制算法之前,首先需要理解DPSK (Differential Phase Shift Keying)原理。
DPSK是一种相位差调制技术,在这种技术中,用于表示数字信息的每个符号产生的相位差直接决定了最终的相位。
因此,每个符号的相位差是根据从前一个符号的相位差导出的。
这样,数字信息的传输可以通过改变相位差来实现,而不是直接改变载波相位。
这种技术还具有抗干扰性强、频谱利用率高等优点。
2. FPGA载波移相控制算法原理FPGA载波移相控制算法旨在实现DPSK调制中的载波移相控制。
在该算法中,首先通过接收器模块读取接收到的信号,并计算接收的两个相邻符号之间的相位差。
然后,通过比较当前符号的相位差与前一个符号的相位差来计算载波的相位差(也称为相移量)。
最后,通过相位差的改变来实现载波的移相控制,从而实现数字信息的传输。
二、FPGA载波移相控制算法步骤1. 接收器模块设计在FPGA载波移相控制算法的实现中,首先需要设计和实现一个接收器模块。
这个模块负责读取接收到的信号,并计算两个相邻符号之间的相位差。
为了实现接收器模块,你可以使用FPGA内置的数字信号处理器(DSP)功能单元。
DSP单元可以执行复杂的算术操作,例如乘法、加法和相位差计算。
利用DSP单元,你可以将接收到的信号转换为数字信号,并通过算法计算相位差。
【PDF】基于dsp 的全数字电机控制解决方案
飓风数字系统(北京)有限公司
CY-MCS2407 电机控制开发套件可视化编程软件
MCWIN2407 是一个基于 WINDOWS 的开发工具。
可视化的编程开发软件,功能如下图所示:
1、项目管理功能:
2、直流无刷、交流无刷伺服电机控制示例:
集成的项目管理功能界面 3、集成可视化的 DSP 内部资源管理功能:
飓风数字系统(北京)有限公司
CY-MCS2407 电机控制开发套件
硬件
DSP 为:TMS320CF2407A 两个事件管理单元 16 路 A/D 16 路 PWM CAN 总线接口 RS-232 接口 内部 32KW Flash LCD、键盘接口 控制设置接口模拟
±5~±15V 模拟接口 4 路硬件捕获单元可以连接 霍尔信号和光电编码器信号 板载电机驱动专用预驱动芯 片 IR2132S 和高达 45A 的 MOSFET 管,可直接驱动直流 有刷电机、无刷电机、交流 异步电机 板上预留光电编码器输入接 口、霍尔输入接口 板载 0.02 欧姆检流电阻和运 算放大器对相电流采样 单电源输入(电机供电电压 12V~48V),板载 DC-DC 变换 器提供 5V 电压
型号
CY-ATK5402
价格
¥7800 元
系统资源
系统组成
DSP 处理器 TMS320VC5402PEG100,最高工作频率 100M 1.
DSP 片外扩展 64K * 16 位 SRAM,通过更改 CPLD 中的 2.
逻辑,即可作为数据区,也可作为程序区使用
3.
CYCLONE5402 板上有 RTL8019AS 网络接口芯片,方便 4.
硬件配置 图 像 采 集 和 5.6 寸彩色液晶显示器(带遥控); CCD 摄像头
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于DSP控制的数字移相器—变压变频器模块的设计 时间:2011-10-31 18:55:34 来源: 作者: 移相器简介 两个同频信号,特别是工频信号之间的移相,在电力行业的继电保护领域中是一个模拟、分析事故的重要手段。传统的移相方式都是通过三相供电用特殊变压器抽头,以跨相的方法进行移相,可统称为电工式移相。还有一种方法就是在信号衰减后,经模拟电路或数字电路实现移相,再由功放进行放大输出,一般称为电子式移相。工频信号经倍频电路(一般为3600或36000倍频)产生倍频信号送至微CPU,由其经过D/A转换器进行波形重新合成,同时微CPU改变合成波形的起始点时间,再经功放放大输出实现移相,一般称为程控式移相。
现在常用的数字移相器由以下几个功能模块组成:变频单元(变压变频器),变流单元(升流器),移相单元(数字相位表),数字电压电流表及辅助电路。 变压变频器简介 输入为市电,整流成直流后经降压斩波后输出,再经过逆变电路变为SPWM波,其基频为变频电源的输出频率。SPWM波经过变压器隔离后,再用LC滤波,即可输出正弦波。这一能量转换过程通常表示为AC-DC-AC。
变频电源主要有以下功能: ● 变频,能将市电转换为用户所需要的频率,一般为40~1000Hz; ● 变相,能将三相交流电变为单相交流电,或者把单相交流电变为三相交流电; ● 变压,能将市电电压转换为可调的电压; 系统方案论证与工作原理 1 系统设计要求 本设计要求性能指标为:三相电压输出0~380V;电流输出0~10A;直流输出电压0~50V;频率范围0~100Hz;按键设定,操作简便,液晶显示。
2 方案分析与整体框图 根据实际要求,我们考虑可以采用以下方案: ①控制部分——使用DSP TMS320F2812内部外设EVA产生三相电压型逆变桥的SPWM,以控制逆变桥臂的IGBT导通关断;使用DSP内部EVA的定时器2来实现PWM驱动Buck电路;经过内部12位AD采样后反馈到PWM控制输出,以达到稳定直流电压的目的。经测试,直流电压输出比较稳定,负载调整率可以达到规定的要求,由于采用内部外设EVA来控制实现,调节方便,速度快,电压、频率可以达到要求的精度。
②主回路——直流输出采用降压斩波电路,直流转换的效率较高,输出采用二级LC滤波;逆变部分采用三相桥式逆变,选用大功率型IGBT。
③保护部分——采用硬件保护和软件保护的方式。硬件保护由模拟电路来实现;软件保护由软件A/D采样部分实现。
④设定与显示部分——由于DSP资源丰富,采用独立按键控制,LCD12864显示,具有良好的人机界面。 整个数字移相器系统如图1所示。
图1 系统结构框图 MCU通过总线将控制数据(移相角,输出频率和幅值等)送入DSP,使用线性光耦隔离,在DSP中,使用内部事件管理器EVA/EVB产生12路SPWM触发脉冲,分别控制电压型、电流型逆变桥IGBT的开关状态,DSP内部集成功率模块保护中断机制。 系统主回路的设计 1 Buck主电路设计 ① 整流部分 整流单元如图2,根据系统要求,交流输入220V,输出最大10A,整流后空载输出为约310V(最大),带负载(约5A)后,直流电压大约下降8~9V。
图2 整流滤波电路图 E1为整流后进行滤波,如果电容值过大,寄生电感电阻过大,会造成不必要的能量损耗,而且在上电瞬间,会造成整流桥瞬间冲击电流过大。
本次设计采用为耐压450V的电解电容C=1200μF。整流桥采用KBPC5010型二极管,耐压为1000V,正向平均整流电流IF(AV)=50.0A(t=55℃),且体积较小、发热低、较实用,所选器件符合本设计的要求。
② 降压部分 降压电路如图3所示。 图3 Buck降压单元 根据系统要求,直流输入最大300V,直流输出最大60V,电流输出最大10A。本电路中的IGBT采用FGA25N120AND,VCES=1200V,IC=20A,trr=235ns,参数满足实验要求。
Vref为直流电压输入,R0、C0为无感阻容吸收部分,以吸收IGBT关断瞬间储存的能量和滤除尖峰,RS为采样电阻,DCA-DCA为电流互感器,采样输出电流,“Sample”为采样输出端。各参数具体选取如下: A 无感电容C0、电阻R0的计算 C0=(2.5~5)×10-8×If;If为IGBT的电流(20A),可以得出C0=0.5~1μF; R0=((2~4)×535)/If=53.5~107。
实际实验中,经过不同RC的匹配,最终选择电阻R0为100Ω/5W、C0为1μF/630V。 B 分压采样电阻的选择 为了不影响后级输出,分压支路电流应尽可能的小,分压电阻尽量大,但考虑到电阻越大,内部噪声也越大,二者折中。DSP采样电压最大为3V,而直流输出最大为60V,故设定分压比例为1/20,选取如下:RS=5KΩ/0.1,RS=250Ω/0.1。
C 电感L的选择 输出电感的量值对于在开关关断时维持到负载的电流十分关键。为了能在最极端的输出电压和输入电流条件下保证最小的电感值仍然支持降压变换器的输出电流,从而向负载输出电流,这个最小电感值是需要确定的一个量值。
下式为一经验公式,用于确定一个连续Buck变换器所需的临界电感值。
其中,f为IGBT的开关频率(10~20kHz),D为占空比,IO为输出电流(5~10A)。可计算得LC=2.5~5.0mH,本设计取5.0mH。
输出Vdc=50V,Imax=10A,Rs采样输出电压,通过线性光耦,由DSP进行PID运算调节输出PWM信号,使Buck电路输出电压恒定50V。
D 滤波电容E2的选择 输出端电容器(E2)是为了使输出电压变得平滑而使用的,升压型的产品因为针对负载电流而断续地流入电流,与降压型产品相比需要更大的电容值。在输出电压较高以及负载电流较大的情况下,由于纹波电压会变大,因此根据各自的情况而选用相应的电容值,推荐使用2000μF以上电容器。
为了获得稳定的输出电压,最好选用等效串联电阻(ESR)较小且容量较大的电容器。特别推荐使用低温特性及泄漏电流特性等优异的钽电解电容器或有机半导体电容器,而且采用小容值电容与大电容(耐压等级相同)并联可起到消除高次谐波与降低等效串联电容的作用。
本次设计中,设定IGBT开关频率为f=10kHz,电感L=5.0mH,E2=2000μF/400V,钽电解电容器。
③ 纹波改善 在实验中发现,纹波与电感有较大关系,当输出电流未达到电感磁芯的饱和电流时,输出尖峰较小;当达到电感磁芯的饱和电流时,输出尖峰瞬间增大。改善电感及磁芯,采用饱和电流较大的电感,在尖峰较小的情况下,可以达到电流标准值。
由实验波形图可知,在IGBT开关时刻产生纹波。改善IGBT开关状态可以降低纹波,在IGBT门极之前串联一25Ω电阻,可改善IGBT导通情况。输出直流50V纹波波形见图4。
图4 Buck单元输出直流50V时纹波波形(×10) 可见,纹波大小为530mV(+1.1%)满足本设计的要求。 2 三相桥式逆变的设计 图5给出了一个典型的三相逆变器的结构。其中,Va、Vb、Vc是逆变输出三相电压,分别接三相负载,D1~D6为续流二极管。PWMx和PWMx_(x=A、B、C)控制逆变器的6个电压功率管,当一个功率管的上臂导通时(PWMx=1),同一个功率的下臂关断(PWMx_=0)。 图5 三相逆变桥 ① 功率管IGBT的选取 系统要求直流输入Vdc最大60V,电流最大10A,输出频率最高100Hz,IGBT开关频率最高3.3kHz(载波比N=33)。根据系统要求,本设计选用FairChild公司FGA25N120AND型IGBT,参数为VCES=1200V,IC=20A,trr=235ns。
② 无感阻容吸收RC的选取 RC选取如下:无感电阻R1~R6= 100Ω/5WΩ,无感电容C1~C6=1μF/630V。
③ LC滤波的设计(无源滤波) 逆变输出三相电压Va、Vb、Vc经LC滤波后,以得到平滑的正弦波,分别接三相阻性负载(7Ω),负载连接方式为星形连接。LC原则上只允许基波(中心频率)通过。
本设计要求输出频率为50~100Hz,可计算得LC=1.01×10-5~2.53×10-6。 图6中,滤波LC的值由经验值和实际实验中比较确定,权衡最小值和最大值,最终选取LA~LC=0.98mH,CA~CC=2μF/500V±5%。
图6 LC滤波 本设计中,LC滤波为无源滤波,虽然结构简单,成本低,但是有一个缺点:只能有一个中心频率,当输出频率改变时,中心频率不能跟随变化,使输出波形稍有畸变。若采用有源滤波器,满足不同频率范围的输出,而波形畸变可以减小到最小,但是相应的成本则会增加。 本设计中无源滤波虽然在不同频率时使波形有些畸变,但是可以满足系统输出的要求。 系统控制模块的设计 1 驱动电路的设计 在本设计中Buck电路和三相逆变桥的驱动开关频率分别为10kHz,和3.3 kHz(最大),中小功率IGBT,采用此芯片作为驱动芯片满足系统设计的要求。
① Buck电路驱动的设计 图7为TLP250光耦驱动电路。图中,光耦芯片TLP250供电电压+15V,输出IO=+1.5A,在中功率电路中可以直接驱动IGBT,使用TLP250时应在管脚8和5间连接一个0.1μF的陶瓷电容来稳定高增益线性放大器的工作,提供的旁路作用失效会损坏开关性能,电容和光耦之间的引线长度不应超过1cm。
图7 TLP250驱动IGBT 保护端为过压、过流保护输出端口,一旦过压、过流,保护模块将输出高电平并且保持,禁止TLP250输出脉冲,直到故障解除后复位。
本设计开关频率为10kHz,三极管BD237/238(NPN/PNP),VCBO=100V,集电极峰值电流Icm=6A(tP<5ms),完全可以达到要求。
R3、IGBT的门极之前,加一小电阻(一般为10~20Ω),用以改善IGBT的开关波形,降低高频噪声。DSP的PWM输出经过上述TLP250光耦电路后的波形输出见图8。
图8 Buck单元PWM经过光耦后的波形输出(×10)