方位角计算公式
一、直线定向
1、正、反方位角换算
对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直
线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角
= (1-13)
上式右端,若<,用“+”号,若,用“-”号。
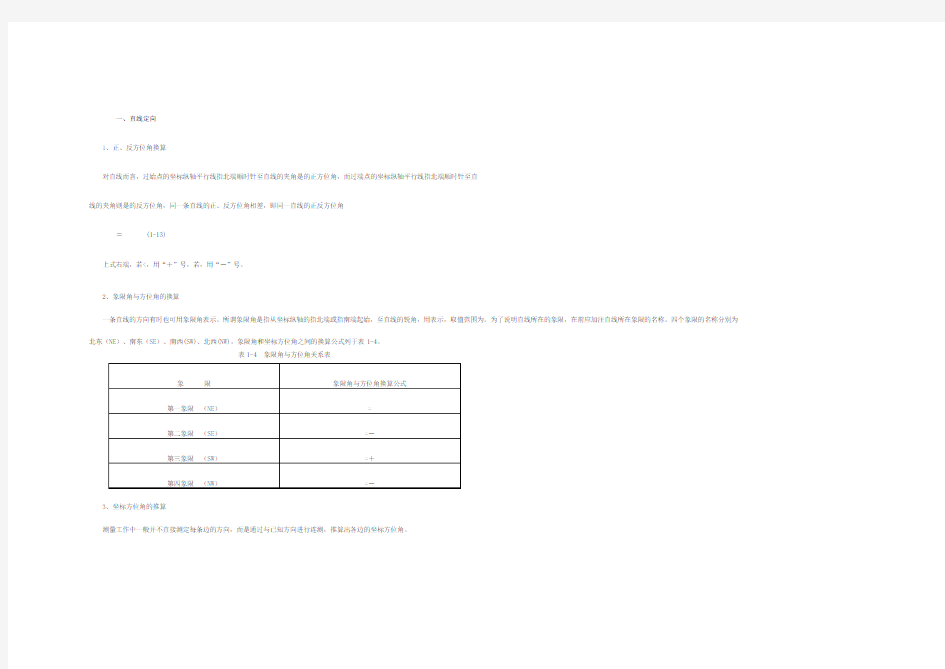
2、象限角与方位角的换算
一条直线的方向有时也可用象限角表示。所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。为了说明直线所在的象限,在前应加注直线所在象限的名称。四个象限的名称分别为
北东(NE)、南东(SE)、南西(SW)、北西(NW)。象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表
3、坐标方位角的推算
测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
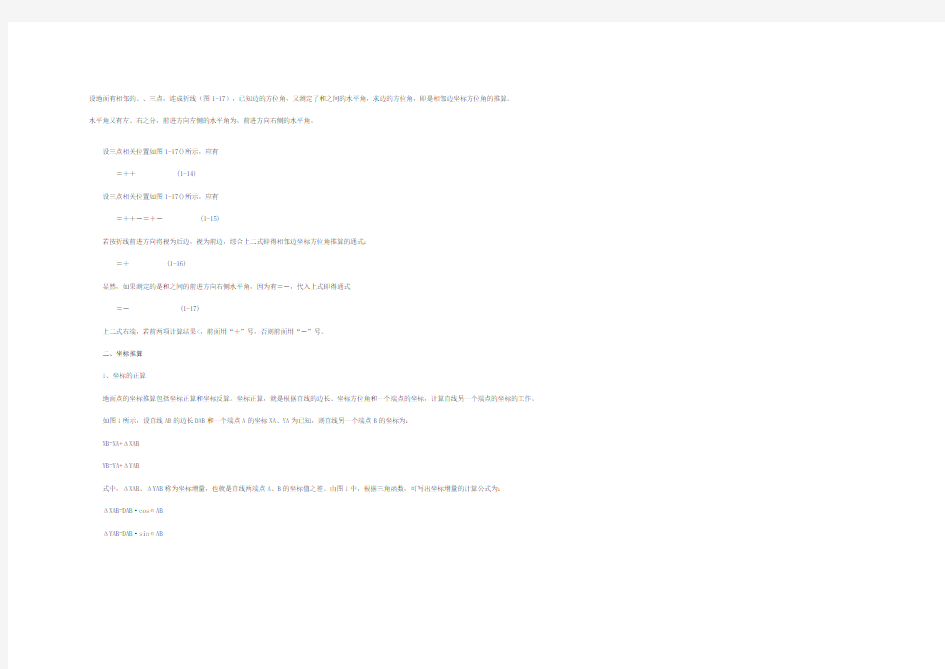
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有
=++ (1-14)
设三点相关位置如图1-17()所示,应有
=++-=+- (1-15)
若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:
=+(1-16)
显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式
=- (1-17)
上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算
1、坐标的正算
地面点的坐标推算包括坐标正算和坐标反算。坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:
XB=XA+ΔXAB
YB=YA+ΔYAB
式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。由图1中,根据三角函数,可写出坐标增量的计算公式为:
ΔXAB=DAB·cosαAB
ΔYAB=DAB·sinαAB
式中ΔX、ΔY 均有正、负,其符号取决于直线的坐标方位角所在的象限, 参见表1-5。
表1-5 不同象限坐标增量的符号
坐标方位角及其所在象限 之符号 之符号
(第一象限) (第二象限) (第三象限) (第四象限)
+ - - +
+ + - -
2、坐标的反算
根据、两点的坐标、和、,推算直线的水平距离与坐标方位角,为坐标反算。由图1可见,其计算公式为: = ( 1-20 ) = ( 1-21 )
注意,由(
1-20)式计算时往往得到的是象限角的数值,必须参照表1-5表1-4,先根据、的正、负号,确定直线所在的象限,再将象限角化为坐标方位角。 例如、均为-1。这时由(1-20)式计算得到的数值为,但根据、的符号判断,直线应在第三象限。因此,最后得==,余类推。
三、举例
1、某导线12边方位角为45°,在导线上2点测得其左角为250°,求α32 ?
解:1)23边的方位角:
根据公式=+
因α12=250°,α12 >180°,
故计算公式中,前面应取“-”号:
α23=α12+-
=45°+250°-180°
=115°
2)求α23反方位角:
根据公式=,本例α23<180°,故前面应取“+”号:
α32=α23+=295°
当前位置:首页-复习总结-基本计算2
一、水准测量内业的方法:
水准测量的内业即计算路线的高差闭合差,如其符合要求则予以调整,最终推算出待定点的高程。
1.高差闭合差的计算与检核
附合水准路线高差闭合差为:
=- () (2-8)
闭合水准路线高差闭合差为:
=(2-9)
为了检查高差闭合差是否符合要求,还应计算高差闭合差的容许值(即其限差)。一般水准测量该容许值规定为
平地=mm
山地=mm (2-11)
式中,―水准路线全长,以km为单位;―路线测站总数。
2.高差闭合差的调整
若高差闭合差小于容许值,说明观测成果符合要求,但应进行调整。方法是将高差闭合差反符号,按与测段的长度(平地)或测站数(山地)成正比,即依下式计算各测段的高差改正数,加入到测段的高差观测值中:
⊿= - (平地)
⊿= - (山地)
式中,―路线总长;―第测段长度 (km) (=1、2、3...);
―测站总数;―第测段测站数。
3.计算待定点的高程
将高差观测值加上改正数即得各测段改正后高差:
h i改=hi+⊿h i i=1,2,3,……
据此,即可依次推算各待定点的高程。
如上所述,闭合水准路线的计算方法除高差闭合差的计算有所区别而外,其余与附合路线的计算完全相同。
二、举例
1.附合水准路线算例
下图2-18所示附合水准路线为例,已知水准点A、B和待定点1、2、3将整个路线分为四个测段。
1)将点名、各测段测站数、各测段的观测高差、已知高程数填入表2-2内相应栏目2、3、4、7(如系平地测量,则将测站数栏改为公里数栏,填入各测段公里数;表内加粗字为已知数据)。
2)进行高差闭合差计算:
=- () =--=+
由于图中标注了测段的测站数,说明是山地观测,因此依据总测站数计算高差闭合差的容许值为:
=== 54mm
计算的高差闭合差及其容许值填于表2-2下方的辅助计算栏。
3)高差闭合差的调整
fh≤fh容,故其精度符合要求。
本例中,将高差闭合差反符号,按下式依次计算各测段的高差改正数:
⊿= - (―测站总数,―第测段测站数)
第一测段的高差改正数为:
⊿=-14mm
同法算得其余各测段的高差改正数分别为-5、-7、-8mm,依次列入表2-2中第5栏。
注:1、所算得的高差改正数总和应与高差闭合差的数值相等,符号相反,以此对计算进行校核。如因取整误差造成二者出现小的较差可对个别测段高差改正数的尾数适当取舍1mm,以满足改正数总和与闭合差数值相等的要求。
2、若为平地,高差改正数按各测段长度比例分配:用公式⊿=-计算,式中,―路线总长;―第测段长度 (km) (=1、2、3...)。
4)计算待定点的高程
将高差观测值加上改正数即得各测段改正后高差:
h i改=hi+⊿h i i=1,2,3,4
据此,即可依次推算各待定点的高程。(上例计算结果列入表2-2之第6、7栏)。
H1=HA+H1改
H2=H1+H2改
……
HB(算)=HB(已知)
注:改正后的高差代数和,应等于高差的理论值(HB-HA),即: ∑h改=HB-HA 。如不相等,说明计算中有错误存在。最后推出的终点高程应与已知的高程相等。
2 闭合水准路线算例
闭合水准路线的计算方法除高差闭合差的计算有所区别而外,其余与附合路线的计算完全相同。计算时应当注意高差闭合差的公式为:fh=∑h测。
如图2所示一闭合水准路线,A为已知水准点,A点高程为,,其观测成果如图中所示,计算1、2、3各点的高程。
将图中各数据按高程计算顺序列入表2进行计算:
36
3
47--
BMB
32-0
辅助计算=30mm
=mm=±68mm
计算步骤如下:
⑴计算实测高差之和∑h测=
=-==30mm
⑶计算容许闭合差fh容==±68mm
fh≤fh容,故其精度符合要求,可做下一步计算。
⑷计算高差改正数
高差闭合差的调整方法和原则与符合水准路线的方法一样。本例各测段改正数vi计算如下:⊿=-(fh/∑n)×n1=-(-17/32)×11=6mm
⊿h2=-(fh/∑n)×n2=-(-17/32)×8=4mm
……
检核∑⊿h =-fh=-
⑸计算改正后高差 h改
各测段观测高差hi分别加上相应的改正数后⊿hi,即得改正后高差:
h1改=h1+⊿h 1=-+=
h2改=h2+⊿h 2=+=
……
注:改正后的高差代数和,应等于高差的理论值0,即:∑h改=0 ,如不相等,说明计算中有错误存在。
⑹高程计算
测段起点高程加测段改正后高差,即得测段终点高程,以此类推。最后推出的终点高程应与起始点的高程相等。即:
H1=HA+h1改=
H2=H1+h2改=+=
……
HA(算)=HA(已知)=
计算中应注意各项检核的正确性。
下一节
:::当前位置:首页-复习总结-基本计算3
一、经纬仪测回法测水平角
1、基本数据:
设、、为地面三点,为测定、两个方向之间的水平角,在O点安置经纬仪(图3-7),采用测回法进行观测。
1)上半测回(盘左)水平度盘读数:
目标:=0°02′06″,
目标:=68°49′18″;
2)下半测回(盘右)水平度盘读数:
目标:=248″49′30″,
目标:=180°02′24″。
2、填表与计算:
1)将目标A、目标B水平度盘读数填入表3-1第4栏。
2)计算半测回角,并将结果填入表3-1第5栏:
盘左: ==
盘右:
注:计算角值时,总是右目标读数减去左目标读数,若<,则应加。3)计算测回角值,并填入表3-1第6栏。
=
注:1.同一方向的盘左、盘右读数大数应相差;
2.半测回角值较差的限差一般为;
3.为提高测角精度,观测个测回时,在每个测回开始即盘左的第一个方向,应旋转度盘变换手轮配置水平度盘读数,使其递增。各测回平均角值较差的限差一般为。水平角取各测回角的平均值。
二、经纬仪测竖直角
竖直角(简称竖角)是同一竖直面内目标方向和水平方向之间的角值,仰角为正,俯角为负,其绝对值为。
1、竖盘构造
经纬仪竖直度盘固定在横轴一端,随望远镜一道转动,竖盘指标线受竖盘指标水准管控制,当指标水准管气泡居中时,指标线应在铅垂位置。目标方向可通过竖直度盘(简称竖盘)读取读数(始读数),而水平方向的读数已刻在竖盘上。
2、竖直角的计算公式
图3-9所示竖盘按顺时针方向注记,且望远镜水平时竖盘读数为:盘左为,盘右为。
盘左(3-4)
盘右= (3-5)
其平均值为 (3-6)
注:竖盘注记形式不同,计算公式也不同。
3、竖直角记录整理举例:
设点安置经纬仪观测目标、C目标的竖角,观测值如下:
目标:盘左:竖盘读数为(设为);
盘右:竖盘读数为(设为)。
目标C:盘左:竖盘读数为(设为99°41′12″);
盘右:竖盘读数为(设为260°18′00″)。
1)将竖盘读数填入下表3-4第4栏。
注:盘左视线水平时,竖盘读数为90°,视线上斜读数减少。
2)计算半测回角,并填入表3-4第5栏中。
盘左(3-4)
盘右=(3-5)
3)计算指标差x,填入表3-4第6栏。
指标水准管气泡居中时,指标线如果偏离正确位置,则指标线的偏离角值称为竖盘指标差x。指标差有两种计算方法:方法1:=(3-12)
方法2: (3-13)
4)计算一测回角,填入表3-4 第7栏。
(3-6)
注:1、指标差对盘左、盘右竖角的影响大小相同、符号相反,采用盘左、盘右取平均的方法就可以消除指标差对竖角的影响。
2、对同一架经纬仪而言,观测不同目标算得的竖盘指标差理应大致相同。该例两个指标差值之所以相差较大,说明读数中含有较多的观测误差。
:::当前位置:首页-复习总结-基本计算4
一、基本计算
对精度要求较高的钢尺量距,除应采用经纬仪定线、在钢尺的尺头处用弹簧秤控制拉力等措施而外,还应对丈量结果进行以下三项改正:
1、尺长改正
设钢尺名义长为,在一定温度和拉力条件下检定得到的实际长为,二者之差值即为一尺段的尺长改正:
(4-5)
2、温度改正
受热胀冷缩的影响,当现场作业时的温度与检定时的温度不同时,钢尺的长度就会发生变化,因而每尺段需进行温度改正:(4-6)
式中C,为钢尺的膨胀系数。
3、倾斜改正
设一尺段两端的高差为,沿地面量得斜距为,将其化为平距(图4-6),应加倾斜改正。
因为,
即有=;又因甚小,可近似认为,所以有
=-(4-8)
以上三项之和即为一尺段的改正数:
(4-9)
4、尺长方程式
尺长随温度变化的函数式称为尺长方程式:
(4-7)
式中―温度为度时钢尺的实际长度;―钢尺的名义长度;等式右端后两项实际上就是钢尺尺长改正和温度改正的组合。
5、相对误差
为了检核和提高精度,一般需要进行往返丈量,取其平均值作为量距的成果。
(4-3)
并以往、返丈量结果的相对误差来衡量其成果的精度。
相对误差: (4-4)
二、举例
例1:钢尺丈量AB的水平距离,往测为,返测为;丈量CD的水平距离,往测为,返测为,最后得DAB、DCD及它们的相对误差各为多少哪段丈量的结果比较精确
解:1)水平距离,由得:
AB: DAB=(+)/2=
CD: DCD=(+)/2=
2)相对误差,由得:
AB:KAB=-/=1/3128
CD:KCD=-/=1/2634
KAB<KCD,故AB的丈量结果比较精确。
例2:一钢尺名义长=30m,实际长=,检定温度=C,作业时的温度和场地坡度变化都不大,平均温度=C,尺段两端高差的平均值=+,量得某段距离往测长=,返测长=,求其改正后平均长度及其相对误差。
解:一尺段尺长改正=
温度改正 ==
倾斜改正 =-=-
三项改正之和= +-=+
往测长的改正数及往测长
==+,m
返测长的改正数及返测长
=+,m
改正后平均长:
=
相对误差:
例3:从A点测设长度为的水平距离AB,初设B点后,测得温度t=23℃,AB两点的高差h=-,已知尺长方程为lt=30-+×10-5(t -20°C)×30m,问需沿地面测设多少长度
解:1)AB段三项改正
尺长改正=-×30=-
温度改正=×10-5(23°C-20°C)×=
倾斜改正=-(2×=-
三项之和(即AB段的改正数):
=-++(-)
=-
需沿地面测设的长度DAB′=DAB-=-(-=
:::当前位置:首页-复习总结-基本计算5
一、基本计算
1、观测值中误差的计算
设在相同条件下对某量进行了n次观测,得一组观测值L1、L2、……Ln,x为观测值的算术平均值,表示观测值改正数,即……
则中误差
2、相对中误差的计算
所谓相对中误差(简称相对误差)就是中误差之绝对值(设为|m|)与观测值(设为D)之比,并将分子化为1表示:=
3、算术平均值及其中误差计算
设对某量进行次等精度观测,观测值为(=1、2……), 其算术平均值为:
算术平均值中误差mx (其中m 为观测值的中误差) 4、观测值函数中误差计算
观测值的倍数函数、和差函数、线性函数的中误差计算如下表所列。
二、举例
例1:对某段距离进行了六次等精度测量,观测值列于表(5-3),试求算术平均值及其中误差、相对误差和观测值中误差。
表5-3 距离测量成果计算表
观测次数 观测值 /m /mm 1、算术平均值
2、观测值中误差:=±
3、算术平均值中误差:=±
4、算术平均值的相对中误差K =1/124400
1 2 3
+7 -1 +4
49 1 16
解:其计算步骤为
1.计算算术平均值
(2)计算观测值改正数
(=1、2……)
本例计算[]=0,说明检核通过。再计算各之平方,得[]=238。
(注:检核:计算[],看其是否为0。如果由于凑整误差使算得的[]为一微小数值,也应视为计算无误。)(3)计算观测值中误差
=mm
(4)计算算术平均值中误差
=mm
(5)计算算术平均值的相对中误差
注:因本例为距离测量,所以需进行相对误差的计算,否则,该项计算免去。
例2:观测一四边形的三个内角,中误差分别±4″,±5″,±6″;则第4个角的中误差为多少?
解:第4各角计算式可写为 x4=360-x1-x2-x3
由线性函数中误差计算公式可得:
m4=±(42+52+62)1/2=±9″
:::当前位置:首页-复习总结-基本计算6
一、基本计算
导线内业计算包括角度闭合差的计算和调整、方位角的推算、坐标增量闭合差的计算和调整及未知点的坐标计算。
1、角度闭合差的计算和调整
1)角度闭合差计算:
a)附合导线:
CD的方位角推算值与其已知值若不等,其差值即称为角度闭合差。
= -=-(-) (6-3)
b)闭合导线
闭合导线角度闭合差为所有内角观测值之和与闭合边形内角和理论值之差,即
-(6-8)
2)角度闭合差的调整
如果小于限差,说明观测成果符合要求,但是需要调整。即将角度闭合差按相反符号平均分配于各角(其分配值即称原角度观测值之改正数)。
注:分配值一般取整至秒,并使其总和与角度闭合差二者绝对值相等。
坐标方位角计算
=(PI()*(1 - SIGN(B3-$B$1) / 2) - ATAN((A3-$A$1) /(B3-$B$1)))*180/PI() Excel 中求方位角公式:a1,b1放起始点坐标 a3,b3放终点坐标。 度分秒格式: =INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180/PI()) &"-"& INT( ((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180 /PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180/ PI()))*60)&"-"&INT( (((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3- $b$1)))*180/PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3- $b$1)))*180/PI()))*60-INT(((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) / (B3-$b$1)))*180/PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) / (B3-$b$1)))*180/PI()))*60))*600)/10 其中:A1,B1中存放测站坐标,a3,b3放终点坐标。 上面的计算出来的是度分秒格式,也就是字符串格式,不能用来计算,只是用来看的哟! 下面这个简单一点: =INT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI())*10000+INT(((PI()*(1-S IGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI()-INT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4) /(C6-C4)))*180/PI()))*60)*100+(((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI()-I NT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI()))-(INT(((PI()*(1-SIGN(C6-C4)/ 2)-ATAN((B6-B4)/(C6-C4)))*180/PI()-INT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*1 80/PI()))*60))/60)*3600 Excel 中求方位角公式:a1,b1放起始点坐标 a3,b3放终点坐标。 求距离公式: =Round(SQRT(POWER((A3-$A$1),2)+POWER((B3-$B$1),2)),3)
日出方位角的判断及计算资料讲解
精品文档 日出方位角的判断及计算 纵观近年来各地的高考题和模拟试题,涉及日出方位角考查的题目不在少数,而这个知识点可以说是高中阶段自然地理的最难点之一,学生很难理解和掌握。下面本文就这个问题进行具体的阐述。 日出方位角,即日出时,太阳所在方位与正东方向的夹角。根据太阳视运动图(图1),可知:太阳直射北半球时,除极昼、极夜区域外,全球太阳东北升西北落;太阳直射南半球时,除极昼、极夜区域外,全球太阳东南升西南落;直射赤道时,除南北极点外,全球太阳正东升正西落。 然而,不同纬度的日出方位角(日出方位偏离正东方的角度)到底多大?日出方位角与太阳直射点的纬度到底是什么关系?本文试图运用中学地理知识,定量研究一下日出方位角问题。 图2表示太阳直射北回归线的日照情况。0号光线为直射北回归线的光线,光线①②③④⑤分别表示赤道、纬线圈A 、北极圈P 、纬线圈B 和南极圈Q 日出时刻光照情况。过P 、Q 图1 二分、二至日北半球(左)与赤道地区(右)太阳视运动示意图 S ③ c ′ c ′ c ′ e ′ Q 图2 ① ② ②′ ④ ⑤ A B N 赤道 P 1 2 3 a b c d o c ′ d ′
一、赤道地区日出方位角的大小 1、赤道夏至时的日出方位角的计算 如图2,∵太阳直射北回归线∴∠1=23°26′ 辅助线ab与赤道共面,且在晨昏圈与赤道的交点a上与赤道相切。直线ab与光线①的夹角为∠2 又∵所有太阳光线均为彼此平行的射线,∴∠2=∠1=23°26′ ∠2=23°26′的地理意义:夏至时,赤道地区日出方位为东偏北23°26′。 2、推论: 赤道地区日出方位角(日出方位偏离正东方的角度)的度数与太阳直射点的纬度度数相等。赤道地区,冬至时太阳直射23°26′S,日出方位角为23°26′,日出方位为东偏南23°26′。春秋分时太阳直射赤道,日出方位角为00,日出方位为正东。 二、其它纬度日出方位角的大小变化规律 1、夏至日其它纬度日出方位角的计算 如图2,辅助线cd、ef分别与纬线圈A、纬线圈B共面,且在地方时为6:00的经线与纬线圈A和纬线圈B的交点c、e处与纬线圈相切。 直线cd与光线②′的夹角为∠3。 ∵所有太阳光线均为彼此平行的射线,纬线圈彼此平行。 ∴∠3=∠2=23°26′。 ∠3=23°26′的地理意义:夏至时,纬线圈A上,地方时6:00太阳光线与当地纬线夹角为23°26′。同理,夏至时,纬线圈B上,地方时6:00太阳光线与当地纬线夹角为23°26′。 这并不是纬线圈A、B日出时刻的太阳方位。 光线②与纬线圈A的切线c′d′的夹角,才是纬线圈A日出时的方位角。这个角明显大于23°26′。 在北极圈P上,光线③从正北方向照射,那里的日出方位偏离正东90°。 2、推论: 赤道以外的其它地区,日出方位角的度数大于太阳直射点的纬度度数。纬度越高偏离角度越大。刚好发生极昼现象的地区偏离正东方90°,太阳从正北(或正南)方升起。 三、一道典型错题的纠 正 题:下图为某地某日的 太阳视运动示意图(图3)。 已知∠A=20°,∠B=65°,则 此地的地理纬度是 ( )。 参考答案为:45°N。 试题提供的参考解析: 由∠A=20°可知,太阳直射 20°N,又由∠B=65°可知此 日该地正午太阳高度为 65°。由H午=90°- 纬度 差,推出该地与直射点的纬 度差为250,所以该地纬度可能是50S或450N。再根据正午太阳位于正南方天空,排除50S。 其实,除了赤道地区日出方位偏离正东方的度数与太阳直射点的纬度度数相等外,其N 图3 精品文档
坐标方位角计算
二 计算坐标与坐标方位角的基本公式 控制测量的主要目的是通过测量和计算求出控制点的坐标,控制点的坐标是根据边长及方位角计算出来的。下面介绍计算坐标与坐标方位角的基本公式,这些公式是矿山测量工中最基本最常用的公式。 一、坐标正算和坐标反算公式 1.坐标正算 根据已知点的坐标和已知点到待定点的坐标方位角、边长计算待定点的坐标,这种计算在测量中称为坐标正算。 如图5—5所示,已知A 点的坐标为A x 、A y ,A 到B 的边长和坐标方位角分别为AB S 和AB α,则待定点B 的坐标为 AB A B AB A B y y y x x x ?+=?+= } (5—1) 式中 AB x ? 、AB y ?——坐标增量。 由图5—5可知 AB AB AB AB AB AB S y S x ααsin cos =?=? } (5—2) 式中 AB S ——水平边长; AB α——坐标方位角。 将式(5-2)代入式(5-1),则有 AB AB A B AB AB A B S y y S x x ααsin cos +=+= }
(5—3) 当A 点的坐标A x 、A y 和边长AB S 及其坐标方位角AB α为已知时,就可以用上述公式计算出待定点B 的坐标。式(5—2)是计算坐标增量的基本公式,式(5—3)是计算坐标的基本公式,称为坐标正算公式。 从图5—5可以看出AB x ?是边长AB S 在x 轴上的投影长度, AB y ?是边长AB S 在 y 轴上的投影长度,边长是有向线段,是在 实地由A 量到B 得到的正值。而公式中的坐标方位角可以从0°到360°变化,根据三角函数定义,坐标方位角的正弦值和余弦值就有正负两种 情况,其正负符号取决于坐标方位角所在的象限,如图5—6所示。从式(5—2)知,由于三角函数值的正负决定了坐标增量的正负,其符号归纳成表5—3。
104373_坐标方位角计算公式
坐标方位角计算公式(通用) 用极坐标法放样必须计算出测站点(仪器点)到放样点得距离和方位角,才能进行放样。 原计算公式为: S12=sqr( (x2-x1)2+(y2-y1)2)= sqr(△x221+△y221) A12=arcsin((y2-y1)/S12) S12为测站点1至放样点2的距离; A12为测站点1至放样点2的坐标方位角。 x1,y1为测站点坐标; x2,y2为放样点坐标。 按公式A12=arcsin((y2-y1)/S12)计算出的方位角都要进行象限判断后加常数才是真正的方位角。 新计算公式为: A12=arccos(△x21/S12)*sgn(△y21)+360° 式中sgn()为取符号函数,改公式只需加上条件(A12>360°, A12= A12-360°)就可以计算出坐标方位角,不需要进行象限判断。 我的这个公式要更好一些,计算结果就是正确结果: SGN是正负号的函数。括号内的数字大于零SGN()就是+号,反之就是-号。
===================================函数开始=================================== 'jiaodu10(x,splitStr)函数将60进制度转换为10进制度格式.x为度数,splitStr为分隔符号,'如x为43%67%367,则splitStr为"%",参数要用双引号括起来,jiaodu10("x","%") Function jiaodu10(x,splitStr) If InStr(1,x,splitStr) Then Dim s s=Split(x,splitStr) jiaodu10=s(0)+s(1)/60+s(2)/3600 Else jiaodu10="错误" End If End Function '-------------------------------------------------------------------------------- 'jiaodu60(x,splitStr)函数将10进制度转换为60进制度格式,splitStr分隔表示 'x为数字,可以不用双引号括起来,参数splitStr要用双引号括起来iaodu10(12.31313,"-") Function jiaodu60(x,splitStr) Dim fen,miao Fen =Round((fen-Int(fen))*60,0) If miao >= 60 Then miao = miao-60 fen = fen+1 End If jiaodu60=Int(x) & splitStr & Int(fen) & splitStr & miao End Function '-------------------------------------------------------------------------------- 'juli(待算点纵坐标x,待算点横坐标y,测站点纵坐标m,测站点纵坐标n)用于计算距离。 Function juli(x,y,m,n) juli=Math.Spr((x-m)^2+(y-n)^2) End Function '-------------------------------------------------------------------------------- 'jiaodu(x,y,m,n)计算角度 Function jiaodu(x,y,m,n) Dim dx,dy,a,jdu10 dx=x-m dy=y-m a=Math.Abs(Math.Atn(dy/dx) * 180 / 3.14159265) jdu10=0 If (dx > 0) Then If (dy > 0) Then jdu10 = a Else jdu10 = 360-a End If Else If (dy > 0) Then jdu10 = 180-a
公路测量计算公式
计算公式 一、 方位角的计算公式 二、 平曲线转角点偏角计算公式 三、 平曲线直缓、缓直点的坐标计算公式 四、 平曲线上任意点的坐标计算公式 五、 竖曲线上点的高程计算公式 六、 超高计算公式 七、 地基承载力计算公式 八、 标准差计算公式 一、 方位角的计算公式 1. 字母所代表的意义: x 1:QD 的X 坐标 y 1:QD 的Y 坐标 x 2:ZD 的X 坐标 y 2:ZD 的Y 坐标 S :QD ~ZD 的距离 α:QD ~ZD 的方位角 2. 计算公式: ()()212212y y x x S -+-=
1)当y 2- y 1>0,x 2- x 1>0时:1 21 2x x y y arctg --=α 2)当y 2- y 1<0,x 2- x 1>0时:1 21 2360x x y y arctg --+?=α 3)当x 2- x 1<0时:1 21 2180x x y y arctg --+?=α 二、 平曲线转角点偏角计算公式 1. 字母所代表的意义: α1:QD ~JD 的方位角 α2:JD ~ZD 的方位角 β:JD 处的偏角 2. 计算公式: β=α2-α1(负值为左偏、正值为右偏) 三、 平曲线直缓、缓直点的坐标计算公式 1. 字母所代表的意义: U :JD 的X 坐标 V :JD 的Y 坐标 A :方位角(ZH ~JD ) T :曲线的切线长,23 22402224R L L D tg R L R T s s s -+??? ? ??+= D :JD 偏角,左偏为-、右偏为+
2. 计算公式: 直缓(直圆)点的国家坐标:X′=U+Tcos(A+180°) Y′=V+Tsin(A+180°) 缓直(圆直)点的国家坐标:X″=U+Tcos(A+D) Y″=V+Tsin(A+D) 四、 平曲线上任意点的坐标计算公式 1. 字母所代表的意义: P :所求点的桩号 B :所求边桩~中桩距离,左-、右+ M :左偏-1,右偏+1 C :J D 桩号 D :JD 偏角 L s :缓和曲线长 A :方位角(ZH ~JD ) U :JD 的X 坐标 V :JD 的Y 坐标 T :曲线的切线长,23 22402224R L L D tg R L R T s s s -+??? ? ??+= I=C-T :直缓桩号 J=I+L :缓圆桩号 s L DR J H -+ =180 π:圆缓桩号
太阳能电池最佳方位角与倾斜角完整版
太阳能电池最佳方位角 与倾斜角 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
太阳能电池组件的方位角与倾斜角选定(1) 由于太阳能是一种清洁的能源,它的应用正在世界范围内快速地增长。利用太阳光发电就是一种使用太阳能的方式,目前建设一个太阳能发电系统的成本还是较高的,从我国现阶段的太阳能发电成本来看,其花费在太阳电池组件的费用大约为30~40%,因此,为了更加充分有效地利用太阳能,如何选取太阳电池方阵的方位角与倾斜角是一个十分重要的问题。 1.方位角 太阳电池方阵的方位角是方阵的垂直面与正南方向的夹角(向东偏设定为负角度,向西偏设定为正角度)。一般情况下,方阵朝向正南(即方阵垂直面与正南的夹角为0°)时,太阳电池发电量是最大的。在偏离正南(北半球)30°度时,方阵的发电量将减少约10%~15%;在偏离正南(北半球)60°时,方阵的发电量将减少约20%~30%。但是,在晴朗的夏天,太阳辐射能量的最大时刻是在中午稍后,因此方阵的方位稍微向西偏一些时,在午后时刻可获得最大发电功率。在不同的季节,太阳电池方阵的方位稍微向东或西一些都有获得发电量最大的时候。方阵设置场所受到许多条件的制约,例如,在地面上设置时土地的方位角、在屋顶上设置时屋顶的方位角,或者是为了躲避太阳阴影时的方位角,以及布置规划、发电效率、设计规划、建设目的等许多因素都有关系。如果要将方位角调整到在一天中负荷的峰值时刻与发电峰值时刻一致时,请参考下述的公式。至于并网发电的场合,希望综合考虑以上各方面的情况来选定方位角。 方位角=(一天中负荷的峰值时刻(24小时制)-12)×15+(经度-116) 10月9日北京的太阳电池方阵处于不同方位角时,日射量与时间推移的关系曲线。在不同的季节,各个方位的日射量峰值产生时刻是不一样的。 2.倾斜角 倾斜角是太阳电池方阵平面与水平地面的夹角,并希望此夹角是方阵一年中发电量为最大时的最佳倾斜角度。一年中的最佳倾斜角与当地的地理纬度有关,当纬度较高时,相应的倾斜角也大。但是,和方位角一样,在设计中也要考虑到屋顶的倾斜角及积雪滑落的倾斜角(斜率大于50%-60%)等方面的限制条件。对于积雪滑落的倾斜角,即使在积雪期发电量少而年总发电量也存在增加的情况,因此,特别是在并网发电的系统中,并不一定优先考虑积雪的滑落,此外,还要进一步考虑其它因素。对于正南(方位角为0°度),倾斜角从水平(倾斜角为0°度)开始逐渐向最佳的倾斜角过渡时,其日射量不断增加直到最大值,然后再增加
日出方位角的判断及计算
日出方位角的判断及计算 纵观近年来各地的高考题和模拟试题,涉及日出方位角考查的题目不在少数,而这个知识点可以说是高中阶段自然地理的最难点之一,学生很难理解和掌握。下面本文就这个问题进行具体的阐述。 日出方位角,即日出时,太阳所在方位与正东方向的夹角。根据太阳视运动图(图1),可知:太阳直射北半球时,除极昼、极夜区域外,全球太阳东北升西北落;太阳直射南半球时,除极昼、极夜区域外,全球太阳东南升西南落;直射赤道时,除南北极点外,全球太阳正东升正西落。 然而,不同纬度的日出方位角(日出方位偏离正东方的角度)到底多大?日出方位角与太阳直射点的纬度到底是什么关系?本文试图运用中学地理知识,定量研究一下日出方位角问题。 图2表示太阳直射北回归线的日照情况。0号光线为直射北回归线的光线,光线①②③④⑤分别表示赤道、纬线圈A 、北极圈P 、纬线圈B 和南极圈Q 日出时刻光照情况。过P 、Q 的粗黑线椭圆为晨昏圈。 图1 二分、二至日北半球(左)与赤道地区(右)太阳视运动示意图 ③ c ′ c ′ ① ② ②′ ④ ⑤ A B N 赤道 P 1 2 3 a b c d o c ′ d ′
一、赤道地区日出方位角的大小 1、赤道夏至时的日出方位角的计算 如图2,∵太阳直射北回归线∴∠1=23°26′ 辅助线ab与赤道共面,且在晨昏圈与赤道的交点a上与赤道相切。直线ab与光线①的夹角为∠2 又∵所有太阳光线均为彼此平行的射线,∴∠2=∠1=23°26′ ∠2=23°26′的地理意义:夏至时,赤道地区日出方位为东偏北23°26′。 2、推论: 赤道地区日出方位角(日出方位偏离正东方的角度)的度数与太阳直射点的纬度度数相等。赤道地区,冬至时太阳直射23°26′S,日出方位角为23°26′,日出方位为东偏南23°26′。春秋分时太阳直射赤道,日出方位角为00,日出方位为正东。 二、其它纬度日出方位角的大小变化规律 1、夏至日其它纬度日出方位角的计算 如图2,辅助线cd、ef分别与纬线圈A、纬线圈B共面,且在地方时为6:00的经线与纬线圈A和纬线圈B的交点c、e处与纬线圈相切。 直线cd与光线②′的夹角为∠3。 ∵所有太阳光线均为彼此平行的射线,纬线圈彼此平行。 ∴∠3=∠2=23°26′。 ∠3=23°26′的地理意义:夏至时,纬线圈A上,地方时6:00太阳光线与当地纬线夹角为23°26′。同理,夏至时,纬线圈B上,地方时6:00太阳光线与当地纬线夹角为23°26′。 这并不是纬线圈A、B日出时刻的太阳方位。 光线②与纬线圈A的切线c′d′的夹角,才是纬线圈A日出时的方位角。这个角明显大于23°26′。 在北极圈P上,光线③从正北方向照射,那里的日出方位偏离正东90°。 2、推论: 赤道以外的其它地区,日出方位角的度数大于太阳直射点的纬度度数。纬度越高偏离角度越大。刚好发生极昼现象的地区偏离正东方90°,太阳从正北(或正南)方升起。 三、一道典型错题的纠正 题:下图为某地某日的太阳视运动示 意图(图3)。已知∠A=20°,∠B=65°,则 此地的地理纬度是( )。 参考答案为:45°N。 试题提供的参考解析:由∠A=20°可 知,太阳直射20°N,又由∠B=65°可知 此日该地正午太阳高度为65°。由H午 =90°- 纬度差,推出该地与直射点的纬 度差为250,所以该地纬度可能是50S或 450N。再根据正午太阳位于正南方天空, 排除50S。 其实,除了赤道地区日出方位偏离正 东方的度数与太阳直射点的纬度度数相等 外,其它地区,日出方位偏离正东方的度数大于太阳直射点的纬度度数。纬度越高偏离角度越大。该题中直射点的纬度应低于200N,该地纬度应低于450N。N S E A B W 图3
坐标方位角计算实例
坐标方位角计算实例 在市政工程施工测量过程中,经常会遇到根据已知导线控制点,利用经纬仪、钢尺测设待定点的实际问题,解决此类问题往往需要计算坐标方位角或点位坐标,根据工作中实践体会将计算方法总结如下: 1 根据已知控制点计算坐标方位角,测设放样点平面位置(极坐标法) 首先明确方位角的概念,方位角是指从直线起点的标准方向北端开始,顺时针量到直线的夹角,以坐标纵轴作为标准方向的称为坐标方位角(以下简称方位角)。测量上选用的平面直角坐标系,规定纵坐标轴为x轴,横坐标轴为y轴,象限名称按顺时针方向排列(图1),即第Ⅰ象限x>0 y>0;第Ⅱ象限x<0 y>0;第Ⅲ象限x<0 y<0;第Ⅳ象限x>0 y<0,或许对于测量坐标系与数学坐标系的x、y 轴位置不同,象限规定不同,觉得难理解,其实能注意到测量上的平面直角坐标系与数学上的平面直角坐标系只是规定不同,x轴与y轴互换,象限的顺序与相反,因为轴向与象限顺序同时都改变,只要真正理解了方位角的定义,测量坐标系的实质与数学上的坐标系是一致的,因此数学中的公式可以直接应用到测量计算中。 1.1 按给定的坐标数据计算方位角αBA、αBP ΔxBA=xA-xB=+123.461m ΔyBA=yA-yB=+91.508m 由于ΔxBA>0,ΔyBA>0 可知αBA位于第Ⅰ象限,即 αBA=arctg =36°32'43.64" ΔxBP=xP-xB=-37.819m ΔyBP=yP-yB=+9.048m 由于ΔxBP<0,ΔyBP>0 可知αBP位于第Ⅱ象限, αBP=180o-α=180o-arctg=180o-13o27'17.33"=166°32'42.67" 此外,当Δx<0,Δy<0;位于第Ⅲ象限,方位角=180°+ arctg 当Δx>0,Δy<0;位于第Ⅳ象限,方位角=360°+ arctg 1.2 计算放样数据∠PBA、DBP ∠PBA=αBP-αBA=129°59'59.03" 1.3 测设时,把经纬仪安置在B点,瞄准A点,按顺时针方向测设∠PBA,得到BP方向,沿此方向测设水平距离DBP,就得到P点的平面位置。 2 当受地形限制不便于量距时,可采用角度交会法测设放样点平面位置 上例中,当BP间量距受限时,通过计算测设∠PAB、∠PBA来定P点
测量常用计算公式.
测量常用计算公式 一、 方位角的计算公式 二、 平曲线转角点偏角计算公式 三、 平曲线直缓、缓直点的坐标计算公式 四、 平曲线上任意点的坐标计算公式 五、 竖曲线上点的高程计算公式 六、 超高计算公式 七、 地基承载力计算公式 八、 标准差计算公式 一、 方位角的计算公式 1. 字母所代表的意义: x 1:QD 的X 坐标 y 1:QD 的Y 坐标 x 2:ZD 的X 坐标 y 2:ZD 的Y 坐标 S :QD ~ZD 的距离 α:QD ~ZD 的方位角 2. 计算公式: ()()212212y y x x S -+-=
1)当y 2- y 1>0,x 2- x 1>0时:1 21 2x x y y arctg --=α 2)当y 2- y 1<0,x 2- x 1>0时:1 21 2360x x y y arctg --+?=α 3)当x 2- x 1<0时:1 21 2180x x y y arctg --+?=α 二、 平曲线转角点偏角计算公式 1. 字母所代表的意义: α1:QD ~JD 的方位角 α2:JD ~ZD 的方位角 β:JD 处的偏角 2. 计算公式: β=α2-α1(负值为左偏、正值为右偏) 三、 平曲线直缓、缓直点的坐标计算公式 1. 字母所代表的意义: U :JD 的X 坐标 V :JD 的Y 坐标 A :方位角(ZH ~JD ) T :曲线的切线长,23 22402224R L L D tg R L R T s s s -+??? ? ??+= D :JD 偏角,左偏为-、右偏为+
2. 计算公式: 直缓(直圆)点的国家坐标:X ′=U+Tcos(A+180°) Y ′=V+Tsin(A+180°) 缓直(圆直)点的国家坐标:X ″=U+Tcos(A+D) Y ″=V+Tsin(A+D) 四、 平曲线上任意点的坐标计算公式 1. 字母所代表的意义: P :所求点的桩号 B :所求边桩~中桩距离,左-、右+ M :左偏-1,右偏+1 C :J D 桩号 D :JD 偏角 L s :缓和曲线长 A :方位角(ZH ~JD ) U :JD 的X 坐标 V :JD 的Y 坐标 T :曲线的切线长,23 22402224R L L D tg R L R T s s s -+??? ? ??+= I=C -T :直缓桩号 J=I+L :缓圆桩号 s L DR J H -+ =180 π:圆缓桩号
天线方位角俯仰角以及指向计算
创新实验课作业报告 姓名:王紫潇苗成国 学号:1121830101 1121830106 专业:飞行器环境与生命保障工程 课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。 因此,星载天线的指向精度是非常重要的。要保证星载天线的指向精度,
课题一双轴驱动机构转角到天线波束空间指向 首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析。星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变 化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。 发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。星载天线双轴驱动机构能够实现对卫星天线的二自由度驱动,是空间环境下驱动天线运动的专用外伸执行机构。卫星天线的二自由度运动能够满足对地通信、星间通信、卫星导航定位、以及对目标的实时观测跟踪,在满足这些需求的同时也要保证其精度的提高,随着需求的不断提高,精度已经成为衡量星载天线双轴驱动机构性能的一个重要指标,同时也是系统设计与实现的一个难点。综上所述可以看出,星载天线双轴驱动机构是驱动卫星天线系统进行准确空间定位的核心部分。 与此同时,我国对星载天线驱动机构的研究、生产制造技术进行了一定时间的学习积累,也成功的应用到了一些卫星上,具有一定的自主能力。自2000年后,我国在发射的卫星中,有很多采用了自主研发的天线驱动机构。相应的研究单位也蓬勃发展,航天科技集团、上海航天局等相关单位对星载天线驱动机构的研究已经取得了很大的成就和进展。特别是伴随着我国自主导航系统一北斗导航系统的不断发展,以及空间实验室和“嫦娥计划”的不断深入。星载天线双轴驱动机构得到了极大地发展。即便如此,我们跟国外还是有一定差距的,目前国内与国外的差距主要在双轴驱动机构精度、使用寿命、可靠性方面,因此还是需要进行深入研究,提高其精度、使用寿命、可靠性。 那么,我们小组也秉承着对航天事业的极大热忱开始对天线指向问题进行研
太阳高度角方位角计算公式
太阳高度角用公式(1)计算。 )cos cos cos sin arcsin(sin t s s h ωωωωθ+= (1) 式中θh 为太阳高度角(°);ωs 为太阳赤纬(°),ω为观测地点的地理纬度(°);t 为观测时刻太阳时角(°)。 公式(1)的赤纬W S 可用公式(2)计算。 ()()() ()()() o W S θθθθθθ3cos 0201.02cos 3656.0cos 7580.03sin 1712.02sin 1149.0sin 2567.233723.000000++--++= (2) 公式(2)中,0θ(°)用公式(3)计算。 ()242.365/36000N N N -?+??=θ (3) 公式(3)中,N (d )为按天数顺序排列的积日。1月1日为0,2日为1;其余类推。 N ?(d )为积日修正值,用公式(4)计算。 ()()24/60/15/60/F S M D N +++±=? (4) 公式(4)中,D 为观测点经度的度值,M 为分值,东经取负号,西经取正号。S 为观测时刻的小时值,F 为分钟值。 公式(3)中的0N (d )用公式(5)进行计算。 ()()()198525.019852422.06764.790-?--?+=Y INT Y N (5) 公式(5)中,Y 为年份。 公式(1)中的时角t 可用公式(6)进行计算。 ()??-+++=151260/60/Q C E L F S t (6) 公式(6)中, C L (h )为以时间表示的经度修正值,每15度对应的时间为1小时,可用公式(3)计算。 15/)12060/(-+=M D L C (7) 式中D 为观测点经度的度值,M 为分值,如果地方子午圈在标准子午圈的东边,则C L 为正,反之为负; Q E (min )为真太阳时与地方平均太阳时之差,用公式(8)进行计算。 ()() ()() 00002cos 6882.0cos 0924.72sin 9059.9sin 9857.10028.0θθθθ--+-=Q E (8) 公式(8)中,0θ用公式(3)进行计算。
计算坐标与坐标方位角的基本公式
二 计算坐标与坐标方位角的基本公式 控制测量的主要目的是通过测量和计算求出控制点的坐标,控制点的坐标是根据边长及方位角计算出来的。下面介绍计算坐标与坐标方位角的基本公式,这些公式是矿山测量工中最基本最常用的公式。 一、坐标正算和坐标反算公式 1.坐标正算 根据已知点的坐标和已知点到待定点的坐标方位角、边长计算待定点的坐标,这种计算在测量中称为坐标正算。 如图5—5所示,已知A 点的坐标为A x 、A y ,A 到B 的边长和坐标方位角分别为AB S 和 AB α,则待定点B 的坐标为 AB A B AB A B y y y x x x ?+=?+= } (5—1) 式中 AB x ? 、AB y ?——坐标增量。 由图5—5可知 AB AB AB AB AB AB S y S x ααsin cos =?=? } (5—2) 式中 AB S ——水平边长; AB α——坐标方位角。 将式(5-2)代入式(5-1),则有 AB AB A B AB AB A B S y y S x x ααsin cos +=+= } (5—3) 当A 点的坐标A x 、A y 和边长AB S 及其坐标方位角AB α为已知时,就可以用上述公式计算出待定点B 的坐标。式(5—2)是计算坐标增量的基本公式,式(5—3)是计算坐标的基本公式,称为坐标正算公式。 从图5—5可以看出AB x ?是边长AB S 在x 轴上的投影长度,AB y ?是边长AB S 在y 轴上的投影长度,边长是有向线段,是在实地由A 量到B 得到的正值。而公式中的坐标方位角可以从0°到360°变化,根据三角函数定义,坐标方位角的正弦值和余弦值就有正负两种 情况,其正负符号取决于坐标方位角所在的象限,如图5—6所示。从式(5—2)知,由于
万能方位角计算公式
先计算出坐标增量: dX=Xb-Xa dY=Yb-Ya dY=dY+1E-10 为了使除数不为零而加一个很小的数 方位角计算万能公式:Az=pi * (1-Sgn(dY)/2)-Atn(dX / dY)单位为弧度 Az=Az * 180 /pi 单位为度 此公式计算无需判断象限,只需在值小于0时加上360即可! 其中,sgn()为求符号函数,若dX<0时其值为-1,dX>0时为1,dX=0时为0。使用此公式不用判断所在象限,直接将坐标增量代入即可求出方位角值,在用计算器编程时若没有SGN()函数可自行判断并用一个变量代替! VBA代码: '方位角计算函数 Azimuth() 'Sx为起点X,Sy为起点Y 'Ex为终点X,Ey为终点Y 'Style指明返回值格式 'Style=-1为弧度格式 'Style=0为“DD MM SS”格式 'Style=1为“DD-MM-SS”格式 'Style=2为“DD°MMˊSS""”格式 'Style=其它值时返回十进制度值 Function Azimuth(Sx As Double, Sy As Double, Ex As Double, Ey As Double, Style As Integer) Dim DltX As Double, DltY As Double, A_tmp As Double, Pi As Double Pi = Atn(1) * 4 '定义PI值 DltX = Ex - Sx DltY = Ey - Sy + 1E-20 A_tmp = Pi * (1 - Sgn(DltY) / 2) - Atn(DltX / DltY) '计算方位角 A_tmp = A_tmp * 180 / Pi '转换为360进制角度 Azimuth = Deg2DMS(A_tmp, Style) End Function '转换角度为度分秒 'Style=-1为弧度格式 'Style=0为“DD MM SS”格式
工程测量计算坐标
知道方位角和距离怎么计算坐标 设原点坐标为(x,y),那么计算坐标(x1,y1)为 x1=x+s·cosθ y1=y+s·sinθ 其中θ为方位角,s为距离 CAD里计算方位角和距离 CAD默认的世界坐标系跟测量上用的坐标系是不同的。世界坐标系中的X即测量坐标系中的Y,世界坐标系中的Y即测量坐标系中的X。 不知道你是不是要编程的方法或源程序?下面是在CAD下的常用操作方法: 用命令id可以查看点的XYZ坐标 例如: 命令: '_id 指定点: X = 517.0964 Y = 431.1433 Z = 0.0000 命令: ID 指定点: X = 879.0322 Y = 267.6949 Z = 0.0000 用命令dist(快捷命令di)即可知道两点间的角度和距离 例如: 命令: '_dist 指定第一点: 指定第二点: 距离 = 397.1308,XY 平面中的倾角 = 335d41'46.7",与 XY 平面的夹角 = 0d0'0.0" X 增量 = 361.9358, Y 增量 = -163.4483, Z 增量 = 0.0000 其中的“XY 平面中的倾角= 335d41'46.7”是世界坐标系内的平面夹角,用450度减去这个值335d41'46.7"即是坐标方位角114°18′13.3〃。 你可以用计算器验算一下,点1、X = 431.1433,Y = 517.0964;点2、X = 267.6949,Y = 879.0322的坐标方位角和距离值是不是114°18′13.3〃和397.131m。 已知两坐标点求方位角和距离的计算公式 如点A(X1,Y1 ) 点B(X2,Y2) A到B的方位角为:Tan(Y2-Y1)/(X2-X1)其中(X2-X1)>0时加360°,(X2-X1)<0时加180° 而距离就是((X2-X1)平方+(Y2-Y1)平方)最后开方得到的值即为A到B距离 方位角坐标计算公式
日出方位角的定量计算
日出方位角的定量问题 根据太阳视运动图(图1),可知:太阳直射北半球时,除极昼、极夜区域外,全球太阳东北升西北落;太阳直射南半球时,除极昼、极夜区域外,全球太阳东南升西南落;直射赤道时,除南北极点外,全球太阳正东升正西落。 然而,不同纬度的日出方位角(日出方位偏离正东方的角度)到底多大?日出方位角与太阳直射点的纬度到底是什么关系?本文试图运用中学地理知识,定量研究一下日出方位角问题。 图2表示太阳直射北回归线的日照情况。0号光线为直射北回归线的光线,光线①②③④⑤分别表示赤道、纬线圈A 、北极圈P 、纬线圈B 和南极圈Q 日出时刻光照情况。过P 、Q 的粗黑线椭圆为晨昏圈。 图1 二分、二至日北半球(左)与赤道地区(右)太阳视运动示意图 S ③ c ′ c ′ c ′ e ′ Q 图2 ① ② ②′ ④ ⑤ A B N 赤道 P 1 2 3 a b c d o c ′ d ′
一、赤道地区日出方位角的大小 1、赤道夏至时的日出方位角的计算 如图2,∵太阳直射北回归线∴∠1=23°26′ 辅助线ab与赤道共面,且在晨昏圈与赤道的交点a上与赤道相切。直线ab与光线①的夹角为∠2 又∵所有太阳光线均为彼此平行的射线,∴∠2=∠1=23°26′ ∠2=23°26′的地理意义:夏至时,赤道地区日出方位为东偏北23°26′。 2、推论: 赤道地区日出方位角(日出方位偏离正东方的角度)的度数与太阳直射点的纬度度数相等。赤道地区,冬至时太阳直射23°26′S,日出方位角为23°26′,日出方位为东偏南23°26′。春秋分时太阳直射赤道,日出方位角为00,日出方位为正东。 二、其它纬度日出方位角的大小变化规律 1、夏至日其它纬度日出方位角的计算 如图2,辅助线cd、ef分别与纬线圈A、纬线圈B共面,且在地方时为6:00的经线与纬线圈A和纬线圈B的交点c、d处与纬线圈相切。 直线cd与光线②′的夹角为∠3。 ∵所有太阳光线均为彼此平行的射线,纬线圈彼此平行。 ∴∠3=∠2=23°26′。 ∠3=23°26′的地理意义:夏至时,纬线圈A上,地方时6:00太阳光线与当地经线夹角为23°26′。同理,夏至时,纬线圈B上,地方时6:00太阳光线与当地经线夹角为23°26′。 这并不是纬线圈A、B日出时刻的太阳方位。 光线②与纬线圈A的切线c′d′的夹角,才是纬线圈A日出时的方位角。这个角明显大于23°26′。 在北极圈P上,光线③从正北方向照射,那里的日出方位偏离正东90°。 2、推论: 赤道以外的其它地区,日出方位角的度数大于太阳直射点的纬度度数。纬度越高偏离角度越大。刚好发生极昼现象的地区偏离正东方90°,太阳从正北(或正南)方升起。 三、一道典型错题的纠正 题:下图为某地某日的太阳视运动示 意图(图3)。已知∠A=20°,∠B=65°,则 此地的地理纬度是( )。 参考答案为:45°N。 试题提供的参考解析:由∠A=20°可 知,太阳直射20°N,又由∠B=65°可知 此日该地正午太阳高度为65°。由H午 =90°- 纬度差,推出该地与直射点的纬 度差为250,所以该地纬度可能是50S或 450N。再根据正午太阳位于正南方天空, 排除50S。 其实,除了赤道地区日出方位偏离正 东方的度数与太阳直射点的纬度度数相等 外,其它地区,日出方位偏离正东方的度数大于太阳直射点的纬度度数。纬度越高偏离角度越大。该题中直射点的纬度应低于200N,该地纬度应低于450N。N S E A B W 图3
方位角的计算方法
方位角的计算方法:(已知方位角+水平角大于540°-540°)已知方位角+水平角±180°=方位角 坐标增量的计算方法: 平距×COS方位角=△X坐标增量 平距×Sin方位角=△Y坐标增量 坐标的计算方法: 已知X坐标±△X坐标增量=X坐标 已知Y坐标±△Y坐标增量=Y坐标 高差、平距的计算方法: 斜距×Sin倾角=高差 斜距×COS倾角=平距 高差÷Sin倾角=斜距 平距÷cos已知度分秒=斜距 高程的计算方法: 已知高程-仪器高+前视高±高差=该点的顶板高差 原始记录计算方法: 前视-后视相加÷2=水平角(前视不够-后视的+360°再减)后视 00°00′00″ 180°00′09″
前视92°49′02″272°49′13″水平角= 92°49′03″ 实测倾角:正镜-270°倒镜-90°(正、倒镜相加-360°)实例: 110°30′38″-90°= 00°30′38″ 实例: 270°30′38″-270°= 00°30′38″ 激光的计算方法:两点的高程相减: 比如:5点高程1479、479-4点高程1471、052 = 8、427 两点之间的平距:60、673×tan7°19′25″=7、798 8、427-7、797=0、629(上山前面的点一定高于后面的点,所以前面的点减后面的点) 测量:1、先测后视水平角:归零,倒镜180°不能误差15′ 2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、高差、量出仪器高,前视量出前视高。 要求方位角-已知方位角±180°=拨角方位 画两千的图:展点用0.6正好. 倾角的计算方法:180°以下的-90° 270°-超过180°的 两点的高差除平距按tan=倾角