钻头导向旋转导向系统Geo-Pilot

“钻头导向”旋转导向系统Geo-Pilot TM
早期的第一代旋转导向工具时采用“侧推钻头”的方式,利用工具外部的零部件侧推钻头,给钻头施加一个强大的外力,迫使钻头偏离钻具轴心运动而切入地层,从而达到定向钻井的效果。这种工作方式,由于钻头是在强大外力的作用下工作的,钻头受力不均匀,井眼有扩大的趋势,容易造成井眼螺旋。同时业由于钻头是在强大外力的作用下工作的,还会导致很多问题发生,最主要的一点就是推动钻头侧向运动的零部件往往容易损坏,同时容易导致钻头螺旋、涡动、高振动,以及MWD/LWD的非正常损坏。其后果是井眼质量受到限制,清洁井眼、反划眼都要浪费大量的时间,测井、下套管、完井作业困难,难以体现施工效益。
由此Sperry-Sun加强了对系统的不断改进,终于设计制造出了目前世界上性能最为可靠的钻头定位旋转导向钻井系统Geo-Pilot TM。该系统并不是利用系统外部的零部件推动钻头来达到定向效果,取而代之的是一套偏心装置,该偏心装置使钻头驱动轴弯曲,驱动轴弯曲就会使使钻头轴心偏离钻具轴心,从而达到定向钻进的效果。
Geo-Pilot TM是美国斯派里森公司(现为美国Halliburton一分公司)和日本国家石油有限公司JNOC联合开发的产品。相对于第一代“侧推钻头”旋转导向工具而言,该工具是第一代“钻头导向”旋转导向工具。系统的斜向驱动轴部分由JNOC设计,斜向轴外部的旋转导向部分由斯派里森公司设计。在获得JNOC专利授权的情况下,该系统由美国斯派里森公司加工制造并投入商业化运营。
1 系统结构
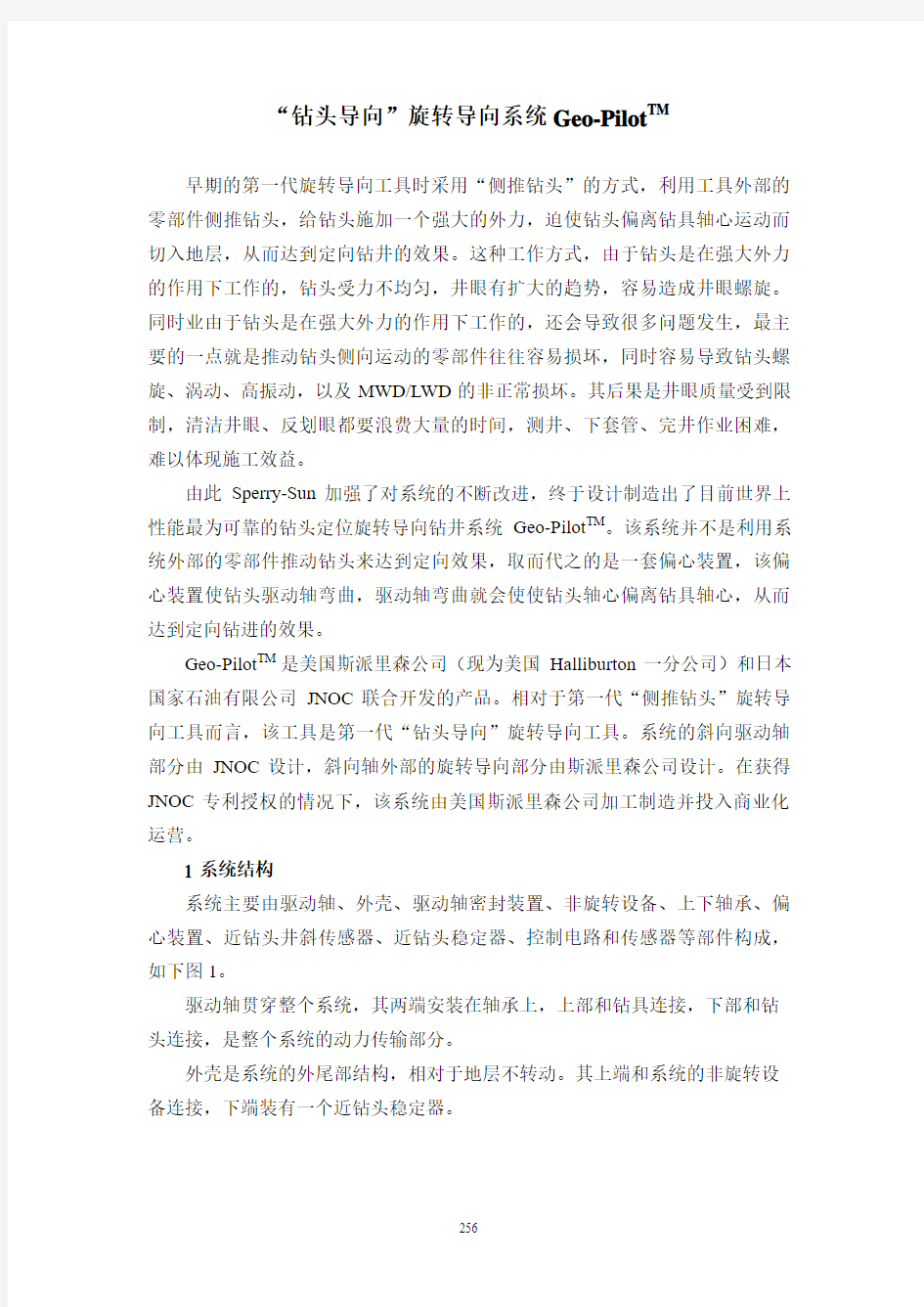
系统主要由驱动轴、外壳、驱动轴密封装置、非旋转设备、上下轴承、偏心装置、近钻头井斜传感器、近钻头稳定器、控制电路和传感器等部件构成,如下图1。
驱动轴贯穿整个系统,其两端安装在轴承上,上部和钻具连接,下部和钻头连接,是整个系统的动力传输部分。
外壳是系统的外尾部结构,相对于地层不转动。其上端和系统的非旋转设备连接,下端装有一个近钻头稳定器。
非旋转设备的祖尧组成为弹簧滚柱。弹簧滚柱确保扶正器处于满眼状态,并保持和井壁接触从而使系统的外壳在转动轴转动的情况下不旋转。
轴承分上下两部分。除常规的减阻作用外,上面的轴承可以防止上部扶正器上面的钻具弯曲,下面的滚珠主要是使Geo-Pilot? 轴心居中,同时还起到一个支点的作用,以使钻头在传动轴稍微弯曲的情况下,钻头能产生较大的偏斜效果。
偏心装置是整个系统导向功能的核心(见图2)。偏心装置由两个偏心环组成,控制两个偏心环运动的机械装置是相互独立的,其转动方向和转动的位置由控制电路控制。转动装置为与之连接的凸轴。
控制电路和传感器部分是检测和控制导向工具状态的核心。一方面传感器不断检测系统的工具面位置(导向系统的工具面方向),另一方面,该部分还根据设计的工具面数据,控制导向系统在钻进过程中对系统产生的工具面偏移进行校正,使系统始终处于稳定的工具面位置施工。 图1 Geo-Pilot TM 结构示意图
密封装置
非旋转设备 轴承 压力补偿器 控制电路和传感器 轴承 偏心环 近钻头井斜传感器 居中轴承 近钻头稳定器 密封装置 驱动轴 外壳 不具备造斜能力 造斜能力最强 造斜能力适中 图2 两个偏心环相对位置关系和造斜能力示意图
近钻头稳定器主要是起支撑的作用,以确保钻头在驱动轴发生弯曲的情况下,强迫钻头改变轴心方向,达到钻头定向的效果。
近钻头井斜传感器用以测量近钻头井斜和系统的工具面方向。
压力补偿器使系统旋转密封部位内的压力稍微高于环空压力。
2 工作原理
Geo-Pilot TM 旋转导向系统的驱动轴贯穿整个系统,其两端安装在轴承上,上部和钻具连接,下部和钻头连接,是驱动钻头转动的动力传输装置。系统的外壳安装在轴承的外围,相对地层不旋转,以此提供一个相对稳定的工具面。外壳两端的旋转密封装置使驱动轴在旋转的同时,所有运动的零部件都浸泡在外壳里面的润滑油里面,以降低运动摩阻并保护这些零部件。外壳内部有一个传感器组,用以测量近钻头井斜和系统的工具面方向。外壳的中间就是系统的核心部件----偏心装置,偏心装置由两个独立的偏心环共同组成。当两个偏心环的偏心位置正好相反时,此时驱动轴不弯取。当两个偏心环的偏心方向一致时,此时驱动轴弯曲幅度最大(其导向能力达到最强)。两个偏心环的偏心位置不在同一直线时,驱动轴的弯曲度介于弯曲幅度最大和不弯曲之间,由此控制系统不同的造斜能力。偏心环的偏心方向可以通过控制偏心环凸轮的转动来实现,两个偏心环的偏心方向矢量和可以指向360°范围内的任意方向,其矢量和的大小也可在最大和最小之间调节,由此形成了系统在不同的方向进行导向、造斜能力可以在最大和最小之间进行控制的特性。
两个偏心环的偏心位置不同时,就会产生转动轴偏斜的效果,偏斜程度和偏斜方向可以根据施工的需要调整和控制。系统的偏心装置和井下控制软件一起工作,自动防止系统在设计工具面误差范围外的状态下工作。
旋转的钻具
悬挂轴承,防止该轴偏心环组合使工强制轴承使钻头指向转轴弯曲的反
图3 Geo-Pilot TM 工作原理示意图
系统的下部轴承距离系统下端部只有0.61米,这种结构可以使驱动轴在发生轻微弯曲的情况下,钻头能有较大的偏斜幅度。
悬挂轴承
偏心环
居中轴承
钻头偏斜范围
图4 Geo-Pilot TM工作原理模拟图
3 系统特点
工作电源:系统的工作电源由一个整装的长寿命锂电池提供,用以监测钻头指向、钻具转动速度、以其自身参数等。
偏心装置简单:偏心装置采用两个偏心环,一个套在另一里面,使装在两个轴承之间的转轴弯曲,产生钻头的偏心效果,同时系统的外壳事部相对旋转的。
自动化自动修正系统:系统使用近钻头井斜传感器,自动修正偏心环位置,自动调整定向工具面和井斜。
双向通讯:井下系统和地面之间的遥控双向通讯,在不占用任何钻机作业时间的情况下,轨迹可以得到很精确的控制。
双向通讯是通过Geo-Span?下行命令传输系统和MWD/LWD来实现的。通过Geo-Span?向井下旋转导向系统下达指令和工作数据,井下旋转导向工具接收指令并通过MWD/LWD系统向地面反馈工作数据和工作状态。采用这种技术,下达的指令从下达开始到井下返回的信息,总时间不超过90秒。由于该系统在地面不会发生故障,因此总能够使用该系统来对井下工具进行控制,控制
的方法为:开泵,在地面转动一个事先规定的井下工具能识别的指令盘,地面指令就可立即传输到井下仪器里面。
为了提高 Geo-Pilot TM系统的可靠性和工作寿命,系统内部的轴承、密封件以及其它运动员元件全部浸泡在润滑油里面。同时由于系统与泥浆隔离工作,因而避免了与泥浆之间的兼容性问题的发生。
Geo-Pilot TM能够钻多目标井,可大幅度提高单井产量。利用该系统钻侧钻井,在北海的两个主井眼钻了6个分支井,其中第四裸眼侧钻分枝井,垂深一直控制在设计轨迹±0.3m范围内。
4、系统优势
摩阻低,因而可有效的保证轨迹向前延伸,可以用于完钻后的下套管和测井作业都很顺利。Geo-Pilot TM由于避免了钻头侧削(底层)的现象,钻具的震动有效降低,该工具特别适用于大摩阻、大扭矩的大位移井和复杂程度很高的三维定向/水平井的施工。
利用系统施工有利于消除井眼螺旋、减少井眼的弯转次数,提高轨迹的定向控制效果和钻井效率,缩短钻井周期,便于下套管和测井作业。
井眼清洁效果好,减少了短起钻次数,提高了钻机的有效工作时间,对大角度井眼效果更佳。
加长钻头的加长部分相当于扶正器的效果,使钻头的使用寿命延长。
由于钻头寿命延长,起下钻次数少,用于钻进的时间多,因而提高了单井钻进速度。
由于使用加长保径钻头,井下钻具的震动降低,MWD/LWD出现故障的几率降低。
使用锂电池供电,取消了涡轮发电机,增加了系统工作的可靠性,延长了系统的有效工作时间。
系统和泥浆隔离工作,消除了系统的轴承、密封件以及其它机械零部件和泥浆的不兼容问题。
系统自身诊断功能向地面实时传输系统的工作数据及工作状态,可确保系统正常工作。
5 闭环控制系统
在最初的试验阶段,系统不具备受地面指令控制的功能,系统的偏斜是固定不变的。这种原始的旋转导向工具只能通过人工控制的方式来控制其工作。随后才有了闭环控制功能。
首先,设计的工具面通过旋转钻具下达到井下MWD,然后将另一个指令从地面下达到井下工具要求它转换该工具面。当从地面下达第二个指令要求开始钻进时,Geo-Pilot? 施自动调整偏心装置里面的两个偏心环的偏心位置,使转动轴的偏斜方向达到设计要求,然后工具就通过不断的监测外壳的旋转、调整偏心装置的偏心位置来保持工具以该工具面方向钻进。
工具面校正的速度很快。目前限制工具面的误差为7°。当转动轴工作的工具面值超出设计的误差范围时,偏心装置能在5秒钟的时间内将它校正到符合要求的工具面范围内。如果按该工具面钻进,轨迹的方向控制不能满足设计要求,可以再从地面向井下工具发送新的指令,新的指令被井下工具接受后,井下工具就按该工具面施工。这种工作模式就是闭环系统。
当全自动系统实现后,Geo-Pilot TM可以实现其它的多项功能,包括向井下工具传送设计的工具面数据、方位/井斜、靶点坐标等。所有这些功能的实现,只需要在地面轻轻敲击键盘就可控制系统工作。
Geo-Pilot TM与斯派里森公司的MWD/LWD组合施工以实现数据的双向通讯,同时和INSITE? (The Integrated System for Information Technology and Engineering)系统兼容,利用该系统在地面除实时显示有关地质参数信息外,还实时显示工具的工作参数和工作状态。
GEO-PILOT旋转导向系统地面与井下工具间的通讯是通过改变泥浆的排量来实现的。由于改变泥浆的排量不需要停止钻具,因而可以在不影响钻井的条件下实现工具位置的改变,实现快速钻进。
GEO-PILOT旋转导向系统可与SPERRY-SUN公司的INSITE TM系统和MWD/LWD组合施工,实现实时几何导向和地质导向。
Geo-Pilot TM采用自动控制和人工控制两种方式进行旋转导向。采用自动控制方式,系统按预先设置的轨迹参数自行控制实钻轨迹;人工控制方式,系统的导向方向和轨迹的控制由定向工程师负责完成。
Geo-Pilot TM的目前有两种系列产品:7600系列(Ф172mm)用于212.73mm到269.88mm井眼施工, 9600(Ф244.5mm) 用于311.1mm到444.5mm 井眼施工。
6 技术规范
Geo-Pilot TM技术规范
旋转导向技术可以用于超长大位移延伸井、异常复杂的三维定向水平井等复杂井的施工,良好的施工效果可以避免用其他工具定向而导致的钻速度慢的问题。此外,由于钻具一直是在旋转,井眼的清洁效果得到大大改善,钻压的传递也因摩阻的降低而变得容易,其优良的定向钻井功能也降低了起下钻次数,提高施工效益。
发展历程
项目于1997年11月在加拿大尼斯库启动。1999年5月开始对系统进行了试验,在一个水泥块里面钻了两个井眼(一个增斜,一个降斜)。试验获得了成功,实际造斜率达到5度/30米。随后进行了一系列的全面试验,以使系统能全面适应各种环境下的作业的需要。
加长钻头 近钻头井斜传感器 非旋转设备 MWD/LWD 配合接头 柔性接头 MWD/LWD
仪器组合 图 Geo-Pilot TM 井下组合示意图
自动旋转导向钻井工具结构原理及特点
自动旋转导向钻井工具结构原理及特点 [摘要] 自动旋转导向钻井工具弥补了滑动式导向钻井工具在定向井钻井,特别是在大位移井及长距离水平井的使用中暴露的缺点与不足。浅显分析国内外在定向钻井工具技术差距,从结构原理和特点上出发阐述了自动旋转导向向钻井工具的。 [关键词] 自动旋转导向钻井工具 一.前言 现有的滑动式导向钻井工具在定向钻井,特别是在大位移井及长距离水平井的使用中暴露出不少缺点与不足。自动旋转导向钻井工具可以弥补这些缺点,是目前定向钻井工具发展的一个热点及方向。笔者据此介绍美国三家公司的自动旋转导向钻井工具的结构原理及特点。针对现有定向钻井工具的缺点和不足,浅析今后旋转导向钻井工具结构设计的发展趋势。 迄今为止,定向钻井技术经历了三个里程碑:①利用造斜器(斜向器)定向钻井; ②利用井下马达配合弯接头定向钻井(造斜率是弯接头弯角、井下马达刚度和地层岩石硬度的函数);③利用导向马达(弯壳体井下马达)定向钻井(弯角点离钻头的距离近得多,因此产生的造斜率大)。 目前这三种定向钻井工具在世界各地被广泛使用,并促进了定向钻井技术的快速发展,使得今天人们能够应用斜井、丛式井、水平井技术开发油田。 二.目前国内定向钻井工具现状 随着石油工业的发展,为了获得更好的经济效益,需要开发深井、超深井、大位移井和长距离水平井,而且常常要在更复杂的地层,如高陡构造带钻井。这些都对定向钻井工具提出了更高的要求。目前以井下马达为主的定向钻井工具已不能满足现代钻井技术的要求,主要存在以下缺点和不足: (1)利用井下马达导向时是滑动钻进,钻柱弯曲比旋转钻进时严重,井壁与钻柱间的轴向摩擦力大,使钻压很难加在钻头上。在大延伸井和水平井中这一情况更严重,在极端情况下会造成钻柱屈服,因此它限制了水平井和大斜度井的深度。 (2)在地面对井下马达进行扭方位操作时,旋转摩擦、钻头扭矩、钻杆的扭转弹性变形等都妨碍了工具面的控制,从而影响井下马达在大斜度井和水平井中的使用。 (3)在导向钻进时,钻柱的扭转弹性变形会引起工具面角不稳定,从而导致井眼轨迹扭曲,进一步加大钻柱受到的摩擦力,同样限制了钻井深度。
钻头导向旋转导向系统Geo-Pilot
“钻头导向”旋转导向系统Geo-Pilot TM 早期的第一代旋转导向工具时采用“侧推钻头”的方式,利用工具外部的零部件侧推钻头,给钻头施加一个强大的外力,迫使钻头偏离钻具轴心运动而切入地层,从而达到定向钻井的效果。这种工作方式,由于钻头是在强大外力的作用下工作的,钻头受力不均匀,井眼有扩大的趋势,容易造成井眼螺旋。同时业由于钻头是在强大外力的作用下工作的,还会导致很多问题发生,最主要的一点就是推动钻头侧向运动的零部件往往容易损坏,同时容易导致钻头螺旋、涡动、高振动,以及MWD/LWD的非正常损坏。其后果是井眼质量受到限制,清洁井眼、反划眼都要浪费大量的时间,测井、下套管、完井作业困难,难以体现施工效益。 由此Sperry-Sun加强了对系统的不断改进,终于设计制造出了目前世界上性能最为可靠的钻头定位旋转导向钻井系统Geo-Pilot TM。该系统并不是利用系统外部的零部件推动钻头来达到定向效果,取而代之的是一套偏心装置,该偏心装置使钻头驱动轴弯曲,驱动轴弯曲就会使使钻头轴心偏离钻具轴心,从而达到定向钻进的效果。 Geo-Pilot TM是美国斯派里森公司(现为美国Halliburton一分公司)和日本国家石油有限公司JNOC联合开发的产品。相对于第一代“侧推钻头”旋转导向工具而言,该工具是第一代“钻头导向”旋转导向工具。系统的斜向驱动轴部分由JNOC设计,斜向轴外部的旋转导向部分由斯派里森公司设计。在获得JNOC专利授权的情况下,该系统由美国斯派里森公司加工制造并投入商业化运营。 1 系统结构 系统主要由驱动轴、外壳、驱动轴密封装置、非旋转设备、上下轴承、偏心装置、近钻头井斜传感器、近钻头稳定器、控制电路和传感器等部件构成,如下图1。 驱动轴贯穿整个系统,其两端安装在轴承上,上部和钻具连接,下部和钻头连接,是整个系统的动力传输部分。 外壳是系统的外尾部结构,相对于地层不转动。其上端和系统的非旋转设备连接,下端装有一个近钻头稳定器。
旋转导向钻井工具的研制原理
第26卷 第5期2005年9月 石油学报 AC TA PETROL EI SIN ICA Vol.26 No.5Sept. 2005 基金项目:国家高技术研究发展计划(863)“旋转导向钻井系统关键技术研究” (2003AA602013)和中国石油化工集团公司重大攻关项目(J P01005)联合资助。 作者简介:闫文辉,男,1965年9月生,1999年获西安石油学院硕士学位,现为西安石油大学副教授,硕士生导师,主要从事石油机械设计及设备 检测与故障诊断方面的教学和科研工作。E 2mail :ywh369@https://www.360docs.net/doc/00115276.html, 文章编号:0253Ο2697(2005)05Ο0094Ο04 旋转导向钻井工具的研制原理 闫文辉 彭 勇 张绍槐 (西安石油大学机械工程学院 陕西西安 710065) 摘要:介绍了旋转导向钻井工具的工作原理及结构,指出了研制该工具的主要技术特点。旋转导向钻井工具主要由稳定平台单元、工作液控制分配单元和偏置执行机构单元3部分组成,其测试元件将测得的井眼参数通过短程通讯传输到随钻测量仪,再由随钻测量仪将信息传输到地面。同时,旋转导向钻井工具接收由地面发出的指令,并通过稳定平台单元调控工作液来控制分配单元中的上盘阀高压孔的位置。工作液控制分配单元将过滤后的泥浆依次分配到3个柱塞,给推板提供推靠动力,并使该推靠力的合力方向始终保持在上盘阀高压孔所对应的位置,在近钻头处形成拍打井壁的侧向力。通过对侧向力的大小、方向和拍打频率的调整,可直接控制该工具的导向状态。 关键词:旋转导向钻井工具;测试元件;导向控制;井眼参数;随钻测量中图分类号:TE82 文献标识码:A Mechanism of rotary steering drilling tool YAN Wen 2hui PEN G Y ong ZHAN G Shao 2huai (College of Mechanical Engineering ,X i πan S hi you Universit y ,X i πan 710065,China ) Abstract :The working principle and structure of a rotary steering drilling tool are introduced.The main technical properties of the tool are described.The tool mainly includes three parts :①unit of stabilization platform ;②unit for controlling and assigning work 2ing liquid ;③unit of Push 2the 2Bit working structure.The wellbore data can be transmitted to measurement while drilling (MWD )u 2nit f rom the test component in the tool through a short distance communication component and then transmitted to the instrument on ground by MWD unit.At the same time ,the receiver in the component receives the instruction f rom the instrument on ground ,and then control the high 2pressure hole located on the upper plate hose by controlling and assigning working liquid with a controller in the stabilization platform unit.The unit for controlling and assigning working liquid takes the filtered mud as the working liquid distribu 2ted in three mud pipes in turn.The mud provides the “pad ”with a motive force and maintains the direction of the join force on the position in accord with the high 2pressure hole on the upper valve all the time.Thus there will form a side force near the bit flapping the wall of the well.The adjustment of the size and direction of the side force acted on the wall and the flapping f requency could di 2rectly control the steering state of the drilling tool. K ey w ords :rotary steering drilling tool ;measurement unit ;steering control ;wellbore data ;measurement while drilling 旋转导向钻井技术是20世纪90年代初发展起来的一项自动化钻井新技术。国外钻井实践证明,在水平井、大位移井、大斜度井、三维多目标井中推广应用旋转导向钻井技术,既提高了钻井速度、减少了事故,也降低了钻井成本。国外目前主要有3种不同类型的旋转导向钻井系统,即:Auto Trak 旋转闭环钻井系统、Power Drive 调制式全旋转导向钻井系统和Geo 2Pilot 旋转导向自动钻井系统[1~8]。国内学者也对该 技术进行了介绍并开展了相关的研究工作[9~14]。胜利石油管理局与西安石油大学联合,研制和开发了具有自主知识产权的旋转导向钻井系统。该旋转导向钻 井技术主要包括井下旋转自动导向钻井系统、地面监控系统以及将上述两部分相结合的双向通讯技术[15]。笔者主要对井下旋转自动导向钻井系统中的旋转导向钻井工具进行了介绍。 1 旋转导向钻井工具工作原理 旋转导向钻井工具的最基本功能有2种:①导向功能;②稳斜或不导向功能。导向功能是指当需要向某一个井斜、方位导向时,可由稳定平台通过控制轴将上盘阀高压孔的中心即工具面角调整到与所需导向的井斜、方位相反的位置上,这时钻具沿所需的井斜及方位进行
斯伦贝谢旋转导向系统 Power-V 使用介绍
斯伦贝谢旋转导向系统Power-V 使用介绍 1 Power-V 简介和应用范围 Power-V是斯伦贝谢旋转导向系统PowerDrive家族中的一员。所谓旋转导向系统,是指让钻柱在旋转钻进过程中实现过去只有传统泥浆马达才能实现的准确增斜、稳斜、降斜或者纠方位功能,但相对于泥浆马达,PowerDrive有非常明显的优点。 旋转导向系统广泛用于使用泥浆马达进行滑动钻进时比较困难的深井、大斜度井、大位移井、水平井、分枝井(包括鱼刺井),以及易发生粘卡的情况。 2 旋转导向系统PowerDrive的优点 ⑴反映和降低了所钻井段的真正狗腿度,使井眼更加平滑。用泥浆马达打30m井段,滑动钻进15m,转动钻进15m,井斜角增加4°,得到平均狗腿度4°/30m。实际上,转钻15m井斜角几乎没有变化,这15m的实际狗腿度是零;而4°的井斜角变化是由滑钻15m产生的,这15m的实际狗腿度是 8°/30m。而用Power-V在同一设置下打出的每米都是同样均匀和平滑的,减少了井眼轨迹的不均匀度,从而减少了在起下钻和钻进过程中钻具实际所受的拉力和扭矩,减少了以后下套管和起下完井管串的难度。 ⑵使用Power-V钻出的井径很规则。使用传统泥浆马达在滑动井段的井径扩大很多,而转动井段的井径基本不扩大。这种井径的忽大忽小是井下事故的隐患,也不利于固井时水泥量的计算。 ⑶由于Power-V钻具组合中的所有部分都在不停的旋转,大大降低了卡钻的机会。使用传统泥浆马达在滑动钻进时除钻头外,其它钻具始终贴在下井壁上,容易造成卡钻。 ⑷在钻进过程中,由于Power-V组合中的所有钻具都在旋转,这有利于岩屑的搬移,大大减少了形成岩屑床的机会,从而更好的清洁井眼。这对于大斜度井、大位移井、水平井意义很大。 ⑸由于Power-V钻具组合一直在旋转,特别有利于水平井、大斜度井和3000m以下深井中钻压的传递,可以使用更高的钻压和转盘转速,有利于提高机械钻速。使用泥浆马达在大井斜的长裸眼段滑动钻进时送钻特别困难,经常是上部的钻杆已经被压弯了,而钻压还没有传递到钻头上,还常常引发随钻震击器下击,损害钻头寿命。 3 Power-V 组成部分和工作原理简介 Power-V主要有两个组成部分,它们分别是上端的Control Unit
CGDS172NB近钻头地质导向钻井技术
C G D S172N B近钻头地质 导向钻井技术在江汉油田的应用 王伟 摘要目前,常规LWD在钻井实际应用中由于测量盲区长,无法准确判断近钻头处的井眼倾角、相关地层岩性、储层特性及储层位置,无法实现真正意义上的地质导向钻井。针对这一难题,本文介绍了我国首套CGDS172NB近钻头地质导向钻井系统的性能特点,并结合在江汉油田的应用实例,分析了近钻头地质导向钻井技术的优越性和重要性,对在国内推广应用国产化近钻头地质导向仪器及近钻头地质导向钻井技术具有重要意义。 关键词近钻头地质导向 LWD 引言 地质导向钻井(Geo-Steering Drilling)技术是近年来国内外发展起来的前沿钻井技术之一,它是一项集定向测量、导向工具、地层地质参数测量、随钻实时解释等一体化的测量控制技术,其特征在于把钻井技术、测井技术及油藏工程技术融合为一体,被广泛应用于水平井(尤其是薄油层水平井)、大位移井、分支井、侧钻井和深探井。目前,国内对地质导向钻井系统的研究还处于较为落后阶段,能够实时测量近钻头处的多种地质参数和工程参数的先进的地质导向钻井系统等前沿钻井技术只有Schlumberger、Halliburton、Baker Hughes等几家大公司能够掌握,并且实施技术垄断政策:只租借不出售,日租金高达数万甚至数十万美元,而且无法得到地质导向钻井核心技术。而国内现用的各种地质导向仪器均存在较大的测量盲区(测量传感器至钻头的距离),无法实时测量近钻头地质参数,技术比较落后,无法实现真正意义上的地质导向。本文通过分析常规LWD存在的弊端,介绍了我国首套CGDS172NB近钻头地质导向钻井系统在江汉油田超薄油层水平井的成功应用,总结了技术经验,对近钻头地质导向钻井技术在国内油田的发展具有重要意义。 1、存在问题分析 对地质导向钻井来讲,仪器越靠近钻头越好,可以及时确定井底地层情况和井眼轨迹,进而制定相应方案。目前国内在水平井和大斜度井施工中基本采用的是常规LWD+导向钻具组合进行地质导向,LWD仪器各测量传感器都装在远离钻头位置的螺杆上方的无磁钻铤内,存在很大的测量盲区(见图1)。电阻率探测点距钻头约8~9 m,伽玛测量点距钻头约13~15 m,井斜、方位测量点距钻头约17~21 m。井眼轨迹参数测量相对滞后,井底工程数据预测十分困难,无法准确预计井眼轨迹的走向。同时,地质参数的严重滞后造成地质人员无法掌握实时的地层资料,现场地层分析困难,无法准确判断近钻头处的井眼倾角、相关地层岩性、储层特性及储层位置。 图1 常规LWD测量盲区示意图
Φ178旋转导向钻井工具机械结构设计说明书
Φ178旋转导向钻井工具机械结构设计 摘要:旋转导向钻井技术是石油工业工程技术领域的关键技术之一,得到了石油钻井工程界的极大关注,发挥着越来越重要的作用,主要应用于水平井、大位移井、超深井、三维多目标井等复杂结构的井作业。本文综述了旋转导向钻井工具的国内外现状,闸明了在我国发展旋转导向钻井技术的重要性和必要性,介绍了它的工作原理及结构组成,指出了研制该工具的主要技术特点。调制式旋转导向钻井工具的导向执行机构是靠内外泥浆液压力差驱动的原理来实现的,这是旋转导向钻井工具能否正常工作的关键。所以,对其液压盘阀分配系统进行分析计算,及其在井下不同工况下所受的力进行分析计算。分析了旋转导向钻井系统的井下钻井工具系的偏置方式和导向方式,完成了导向执行机构机械部分的设计。 关键词:旋转导向钻井工具;机械结构设计;压力差;
Φ178 Rotary Steerable Drilling Tool Mechanical Structure Design Abstract:In many oil industry engineering filed key technologies,rotary steerable drilling technology is one that has been paid much attention to in recent years and exhibits more and more importance in oil drilling industry, mainly used in horizontal well,extended reach well,ultra-deep well ,3D multi-target well the complex structure of multi-lateral wells in wells operating. This paper reviews the domestic and international drilling tool status, illustrates the development of rotary steerable drilling technology of the importance and necessity to introduce the working principle and its composition, that the development of the main technical features of the tool. Modulated rotary steerable drilling tool driven by the executing agency is the pressure difference between inside and outside the mud fluid-driven principles to achieve, which is whether the drilling tool to work the key. Therefore,its hydraulic disc distribution system analysis and calculation, and its different working conditions in underground analyzing and calculating the force. Analysis of downhole rotary steerable drilling tool drilling system orientation bias way. Complete guide the design of mechanical parts of the implementing agencies. Key words: Rotary steering drilling tool;Mechanical parts design;Pressure difference
33.适用于旋转导向钻井工具的非接触式电能传输方法
万方数据
万方数据
第21卷第2期陈红新等:适用于旋转导向钻井工具的非接触式电能传输方法115 L面di十虿1,id£+i(£)R—Vo(6)求解得 i=皂sin(叫t)e-÷(7) 6U』一 由式(7)可知,减小回路的电感对提高发射电流有着特别重要的意义。在设计时,发射线圈采用扁带线,以减小电感【4J。 在理论分析和计算的基础上,采用罗果夫斯基线圈【4’5]对发射线圈中的电流进行了测量。罗果夫斯基线圈的结构如图7所示,传输被测电流的导体从线圈中心穿过,设电流传输导线与罗果夫斯基线圈每匝中心的距离为r,被测电流为i(£),则穿过线圈每匝的磁感应强度B,为 B,=/zi(£)/(2丌,.)(8) 图7用罗果夫斯墨线圈测量发射电流 感应电压乱(£)与B,的关系为 “(£)一,zS挚(9)根据式(8)可推出 础)=筹掣tit=M警(10) Z丁cra£ 式(10)中,2为线圈匝数;S为每匝线圈的面积;M=pnS/(2rtr)。 式(10)中,示波器测出的电压配(£)与被测电流i(£)的导数成正比,为了得到U(£)与i(£)的正比关系,在电路中设置了R、C积分电路。当电缆的波阻抗Z远远大于罗果夫斯基线圈的感抗∞L时,可略去测量线圈的内压降,认为U(£)全部降落在Z上。另外,通过对积分电路中R、C的选择可使R》1/(cJC,因而可认为通过C的电流ic(£)≈“(£)/R,故C上的电压“c(£)为 “t)一钟幽)一志弘m 一志『M警一拦m,…, 测量过程中需要消除强磁场在电缆外皮中产生的噪声电流而引起的共模干扰,这种噪声电流引起的电压降将耦合到被测信号上。干扰信号的大小与电缆的耦合阻抗有关,即 Z—VN/tN(12)式(12)中,V。为噪声电压,JN为噪声电流。为消除干扰,采取了如下措施:采用双屏蔽电缆,减小感生电流和耦合阻抗;缩短接地回路,消除地电位升高而造成的影响。采用以上措施后获得良好的效果,对比情况如图8和图9所示。 8 4 -4 -8 八八/\八 .V1V2V卜“I 图8采取抗干扰措施后的测试结果 图9未采取抗干扰措施的测试结果 4结束语 针对导向钻井工具的特点,设计了一种适合于旋转件与非旋转件之间的非接触式电能发射系统。采用单片机、驱动电路、脉冲变压器、脉冲电容器等小体积、高电压、大电流器件,制作了高能量密度的电能发射装置,通过慢充电、快放电方式在发射线圈上产生冲击大电流。在理论分析和计算的基础上,采用罗果夫斯基线圈对发射电流进行了测量,测量过程中采用了良好的屏蔽和接地等噪声抑制措施,得到了满意的结果,发射线圈上的实测电流峰值为8kA。研究结果表明,包括发射线圈在内的电能发射电路的R、L、C等参数对发射电流的影响 (下转第119页) 万方数据
φ178旋转导向钻井工具设计说明书
φ178旋转导向钻井工具设计及控制轴的动力学分析 摘要:旋转导向钻井技术是现代导向钻井技术的发展方向,主要应用于大位移井、多分支井等复杂结构的井作业。本文综述了旋转导向钻井工具的国外现状,阐明了在我国发展旋转导向钻井技术的重要性和必要性,介绍了它的工作原理及结构组成 ,指出了研制该工具的主要技术特点。调制式旋转导向钻井工具的导向执行机构是靠外泥浆液压力差驱动的原理来实现的,这是旋转导向钻井工具能否正常工作的关键。所以,对其液压盘阀分配系统和控制轴进行分析计算,及其在井下不同工况下所受的力进行分析计算。分析了旋转导向钻井系统的井下钻井工具系统的测控方式,偏置方式和导向方式。完成了导向执行机构机械部分的设计,最后,对控制轴进行了动力学分析,并对工具进行了经济型评价和总结。 关键词:旋转导向钻井;设计;动力学分析
Design and Control of the Dynamic Analysis of Shaft of 178 mm Diameter Rotary Steerable Drilling Tool Abstract Rotary steerable drilling technology is the development of modern drilling technology-oriented direction, mainly used in extended reach well, the complex structure of multi-lateral wells in wells operating. This paper reviews the domestic and international drilling tool status, illustrates the development of rotary steerable drilling technology of the importance and necessity to introduce the working principle and its composition, that the development of the main technical features of the tool. Modulated rotary steerable drilling tool driven by the executing agency is the pressure difference between inside and outside the mud fluid-driven principles to achieve, which is whether the drilling tool to work the key. Therefore,its hydraulic disc distribution system and control valve axis analysis and calculation, and its different working conditions in underground analyzing and calculating the force. Analysis of downhole rotary steerable drilling tool drilling system monitoring and control system mode, manner and orientation bias way. Complete guide the design of mechanical parts of the implementing agencies, and finally, axis of the dynamic analysis of the control, and the tools of the economic evaluation and summary. Keywords Rotary Steerable Drilling; Design; Dynamic Analysis
Welleader旋转导向钻井系统
Welleader?旋转导向钻井系统 COSL的Welleader?旋转导向钻井系统可以在钻柱旋转同时实现井眼轨迹的自动控制。系统通过精准的导向力矢量控制实现钻头姿态的快速响应,具有高精度近钻头井斜角及工具面角测量能力,能够实现井斜自动闭环控制,可适应复杂地层条件及钻井条件,完成定向井,复杂三维轨迹定向井、大位移井等的钻井作业,井眼轨迹控制能力强,井身质量好。该系统可与COSL的Drilog?随钻测井系统组合实现精准的地质导向钻井。 n? 旋转定向钻井 Welleader?旋转导向钻井系统在钻具旋 转钻进过程中实现精确导向控制,扭矩、 摩阻小、钻出井眼平滑、建井周期短, 可有效降低钻井施工成本。 n? 地面实时控制 通过程控分流装置CDL,可将地面控制 指令下传到井下。Welleader?通过检测 泥浆排量的变化解析指令并执行。指令 下传可在钻进过程中进行,不影响钻井 时效。 n? 精确闭环控制 Welleader?系统的导向单元通过电机泵 液压系统驱动,闭环控制三个导向翼肋 的导向力,形成稳定的导向合力的大小 和方向。定向钻进过程中,导向数据和 仪器状态可通过MWD实时上传,定向 井工程师可根据需要实时下传指令,控 制井眼轨迹。
n? 近钻头测量 Welleader?近钻头测量模块位于钻头后1.3m以内(675规格仪器为1.1m),可在第一时 间得到仪器姿态和近钻头钻头井斜,为导向控制提供精确导航。 n? 多种控制模式 Welleader?支持导向模式、扶正器模式、稳斜模式等多种控制方式,除可通过设定导向 力方向和大小灵活调整井斜和方位,还可设定目标井斜控制钻头自动稳斜钻进。 n? 涡轮发电机供电 Welleader?自带大功率涡轮发电机,为导向控制单元提供稳定电源。发电机涡轮可根据 现场情况选配,适用多种排量范围。 n? 强大轨迹控制能力 Welleader?的稳定轨迹控制能力已先后在新疆、东北、华北、渤海等不同地质环境的实 际钻井中得到验证,其系列规格仪器可适用于8.5″和12.25″井眼,实钻30m控制狗 腿度可达6.5°。 n? 实时地质导向 Welleader?可与Drilog?无缝衔接,地质工程师可第一时间获得随钻测井数据,可实时决 策,优化调整井眼轨迹,以实现精确着陆和层中钻进。 仪器规格 675系列 950系列 仪器外径 178mm 244mm 仪器总长 8.03 m 10.24 m 适应井眼 215.9mm(8--‐1/2″) 标准 311mm(12--‐1/4″)标准 造斜率 0~6.5° 0~6° 连接扣型 上部:5--‐1/2″API I F. B ox 下部:4--‐1/2″API R eg.Box 上部:6--‐5/8″API R eg. B ox 下部:6--‐5/8″API R eg. B ox 适应排量 1500~2400 L/min 2200~5600 L/min 最大转速 160 r pm 最大扭矩 20 k Nm 45 k Nm 最大钻压 20 t 35 t 最高工作温度 150 ℃ 最高工作压力 20000 p si 最高振动 20 g rms(5Hz~1 k Hz) 最高冲击 500 g@1ms 半正弦 井斜 量程0~180°;精度±0.1°(井斜大于5°) 近钻头测量 距钻头距离 1.1 m 1.3 m
SL6000NWD近钻头随钻地质导向系统简介201503
SL6000NWD近钻头随钻地质导向系统 简介 NWD近钻头随钻地质导向系统是胜利伟业石油工程技术服务有限公司于2012年10月研制成功并投入现场应用的。到目前为止,在胜利油田和大港油田成功完成13口定向井和水平井的施工作业服务,累计钻进时间1200多小时钻进4000多米。一次下井成功率达90%以上,,中靶率100%,油层钻遇率100%(常规LWD中靶率为95%,油层钻遇率80%左右)。 2014年9月26日通过山东省的科技成果鉴定,由中石油、中石化、石油院校钻井、测井、以及其他石油工程专业专家教授组成的评审委员会认定该系统达到国际先进水平。 NWD近钻头随钻地质导向系统的测量项目有:自然伽马、井斜、地层的深浅(4条)电阻率。仪器垂直时测量点距钻头的距离2.8米。在钻具斜度大于70度时,所测量到的地质数据与钻头位置的地质数据接近,比传统的仪器更早的发现目的层。 一、SL6000NWD随钻地质导向系统有以下几部分组成 1、SL6000LWD地面仪器系统 1)地面测控防爆机箱(数据采集机箱) 2)主控工业微机工作站(HP) 3)显示器、鼠标、键盘 4)热敏绘图仪 5)净化不间断电源
6)司钻阅读器(DDU)及连线 7)地面测量多种传感器及连线(深度、钩载、泥浆压力探头) 2、NWD近钻头随钻测量下井仪器和定向工具 1)泥浆脉冲发生器 2)探管(井斜方位、工具面) 3)短传接收短节 4)螺杆马达 5)近钻头测量短节(包括自然伽马、电磁波阵列电阻率、井斜探头) 6)弯壳体 7)稳定器 二、SL6000-NWD近钻头仪器主要技术指标 项目参数指标 外径180mm 适用井眼8.5~12.5in 耐温150° 耐压120MPa 连续工作时间>400h 脉冲发生器类型正脉冲 上传速率0.5bit/s 钻头转速100~200 r/min 马达排量19 ~38 L/s 含砂<1% 项目测量范围测量精度 方位角0-360°±1.5 井斜角0-180°±0.2° 工具面角0-360°±2.5° GR 0-380API ±5% 电阻率R40 0.2~2000Ω.M ±10%@100Ω.M 电阻率R20 0.2~2000Ω.M ±10%@100Ω.M
一种新型近钻头地质导向系统的设计与实现
一种新型近钻头地质导向系统的设计与实现 摘要:随着油田开发进入后期,开发油层越来越薄,难度逐渐增加。为了在薄油层中保持较高的油层钻遇率,采用近钻头随钻仪器是十分必要的。本文介绍一种新型近钻头随钻仪器,采用井下无线短传技术将近钻头数据短传到螺杆上方的常规随钻LWD,通过泥浆脉冲器将数据实时发送地面。主要功能包括近钻头井斜测量、近钻头电阻率测量、以及方位伽马成像等。 关键字:近钻头,短传通信,电阻率 一、近钻头地质导向系统的意义 随着油田开发进入后期,开采油层越来越薄,常规随钻测井系统LWD由于测量地层数据测点距离井底有10-15m的零长,不能满足超薄油层钻井技术服务需求,只有采用测量参数零长很短的近钻头随钻测量仪器才能有效的提高超薄油层钻遇率[1]。目前三大石油公司都有自己的近钻头地质导向系统,而我国目前还没有自己的近钻头地质导向系统,研制自己的近钻头地质导向系统不仅可以满足超薄油层水平井钻井的技术需要还可以提高我国石油工程技术服务企业在国际石油市场上的竞争力。近钻头地质导向系统是超薄油层水平井钻井必不可少的钻井利器。 二、近钻头地质导向系统的实现 下图是近钻头地质导向系统总体框图,主要包括常规随钻测井系统LWD、近钻头接收短节、近钻头测量仪。 图1 近钻头地质导向系统总体框图 左边是常规LWD,中间是钻井螺杆,右面部分是近钻头测量工具。近钻头测量仪通过无线短传,将近钻头的测量数据跨越螺杆传输到LWD模块中,然后通过泥浆脉冲编码的传送到地面。近钻头随钻仪器安装在常规LWD的通讯短节中,这样可以不增加传统LWD长度的同时实现与近钻头测量仪器的通信功能。 近钻头测量仪,长1m,扣型431×430,内径44.5mm,外径178mm。主要由短传通信模块、方位伽马模块、井斜工具面模块、电阻率测量模块及供电系统组成。图2为近钻头测量仪组成结构框图。
旋转导向钻井技术介绍
旋转导向钻井技术介绍 引言 近十几年来,水平井、大位移井、多分支井等复杂结构井和“海油陆采”的迅速发展。为了节约开发成本和提高石油产量,对那些受地理位置限制或开发后期的油田,通常通过开发深井、超深井、大位移井和长距离水平井来实现,进而造成复杂结构的井不断增多。目前通行的滑动钻井技术已经不能满足现代钻井的需要。于是,自20世纪80年代后期,国际上开始加强对旋转导向钻井技术的研究;到90年代初期,旋转导向钻井技术已呈现商业化。国外钻井实践证明,在水平井、大位移井、大斜度井、三维多目标井中推广应用旋转导向钻井技术,既提高了钻井速度,也减少了钻井事故,从而降低了钻井成本。旋转导向钻井技术是现代导向钻井技术的发展方向。 旋转导向钻井技术 旋转导向钻井法是在用转盘旋转钻柱钻井时随钻实时完成导向功能。钻进时的摩阻与扭阻小、钻速高、钻头进尺多、钻井时效高、建井周期短、井身轨迹平滑易调控。此外,其极限井深可达15 km,钻井成本低。旋转导向钻井技术的核心是旋转自动导向钻井统,如图1所示。它主要由地面监控系统、地面与井下双向传输通讯系统和井下旋转自动导向钻井系统3部分组成。 1、地面监控系统 旋转导向钻井系统的地面监控系统包括信号接收和传输子系统及地面计算存储分析模拟系统,有的还具有智能决策支持系统。旋转导向钻井系统的主要功能通过闭环信息流监视并随钻调控井身轨迹,其关键技术是从地面发送到井下的下行控制指令系统。 2、地面与井下双向传输通讯系统 目前已提出的信号传输方式有4种,即钻井液脉冲、绝缘导线、电磁波和声波。通过比较分析,笔者发现这4种传输方式各有优缺点和应用局限,如表1所示。
3、井下旋转自动导向钻井系统 井下旋转自动导向钻井系统是旋转自动导向系统的核心,它主要由3部分构成,即测量系统、导向机构、CPU和控制系统。 (1)测量系统测量系统主要用于监测井眼轨迹的井斜、方位及地层情况等基本参数,使钻井过程中井下地质参数、钻井参数和井眼参数能够实时测量、传输、分析和控制。它经历了随钻测量(MWD)、随钻测井(LWD)、随钻地震(SWD)、随钻地层评价测试技术(FEMWD)和地质导向技术(GST)几个阶段。 (2)导向机构导向机构代表了目前导向技术的先进水平。按原理不同,导向机构原理可分为: ①导向力原理。推力式(或称偏置式)旋转导向工具和指向式旋转导向工具。推力式旋转导向工具是通过侧向力推靠钻头来改变钻头的井斜和方位。而指向式旋转导向工具是预先定向给钻头一个角位移,通过为钻头提供一个与井眼轴线不一致的倾角来使钻头定向造斜。 ②控制原理。可变径稳定器式旋转导向工具和调制式旋转导向工具。前者是先通过电磁阀调节在伸缩块上的液压,以使导向力矢量满足所需导向目标;再通过定向控制系统进行方位与井斜的控制(图2)。而后者是通过调节涡轮发电机负载电流改变涡轮发电机绕组回路阻抗,以使携带高强度永磁铁的涡轮叶片与稳定平台内的扭矩线圈耦合产生不同的电磁转矩和加速度,进而使旋转换向阀保持一个相对于井壁的固定角度,即工具面角,最终实现控制轴在受控状态下的运动状态改变(图3)。 ③套筒旋转与否原理。全旋转导向工具和不旋转套筒旋转导向工具。全旋转导向工具与井壁动态接触,其旋转控制阀在垂直井段随钻柱一起旋转。不旋转套筒旋转导向工具与井壁静态接触,其外套不随钻柱旋转。
导向钻井技术
导向钻井技术 一概述 1.定义 钻井技术发展的新阶段是自动化钻井。所谓自动化钻井就是钻井的全部过程依靠传感器测量各种参数,并用计算机采集,进行综合解释与处理,然后再发出指令,最后由各相关设备自动执行,使整个钻井过程变成一个无人操作的自动控制过程。 自动化钻井的全过程分六个环节: (1)地面实时测量主要用综合录井仪。 (2)井下随钻测量目前主要用MWD/LWD/FEWD等。 (3)数据实时采集由相关计算机(井下或地面)完成。 (4)数据综合解释并发出指令应用人工智能优化钻井措施。 (5)地面操作自动化地面操作自动化(铁钻工/自动排管机) (6)井下操作自动控制钻头自动导向(轨迹自动控制)。 以上六个环节中,井下随钻测量和井下自动控制是关键环节,同时也是关键技术,二者结合起来实际上是井眼轨迹自动控制技术(即自动导向钻井技术)(AutoTrak自动跟踪/ClosedLoopSteeringDrilling 闭环钻井)。
导向钻井实际就是井眼轨迹控制问题,无论是常规直井或特殊工艺井,都需要井眼轨迹控制。直井需要防斜打直,定向井需要按设计井眼轨道控制钻头钻进的轨迹。传统的导向钻井(即井眼轨迹控制)是由井下导向工具配以适当的钻井参数来实现的,自动导向钻井是由井下计算机根据随钻采集的参数自动控制导向工具来实现的。 2.发展沿革 自动导向钻井技术是钻井工程领域的高新技术,代表着世界最先进的钻井技术发展方向。目前,在世界范围内水平井、大位移井、分支井等高难度的复杂井正蓬勃发展,常规钻井技术难以适应需要,必 须依靠先进的导向技术才能保证井眼轨迹的准确无误。
迄今为止,定向钻井技术经历了三个里程碑:(1)利用造斜器(斜向器)定向钻井;(2)利用井下马达配合弯接头定向钻井;(3)利用导向马达(弯壳体井下马达)定向钻井。这三种定向钻井工具的广泛使用,促进了定向钻井技术的快速发展,使得今天人们能够应用斜井、丛式井、水平井、水平分支井技术开发油田。 随着石油工业的发展,为了获得更好的经济效益,需要钻深井、超深井、大位移井和长距离水平井,而且常常要在更复杂的地层如高陡构造带钻井。这些都对定向钻井工具提出了更高的要求。 为了克服滑动导向技术的不足,从20世纪80年代后期,国际上开始研究旋转导向钻井技术,到20世纪90年代初期多家公司形成了商业化技术。旋转导向钻井系统实质上是一个井下闭环变径稳定器与测量传输仪器(MWD/LWD)联合组成的工具系统。它完全抛开了滑动导向方式,而以旋转导向钻进方式,自动、灵活地调整井斜和方位,大大提高了钻井速度和钻井安全性,轨迹控制精度也非常高,非常适
φ178旋转导向钻井工具设计开题报告材料
本科毕业设计(论文)开题报告 题目:φ178旋转导向钻井工具设计 及控制轴动力学分析 学生: 院(系):机械工程学院
专业班级: 指导教师: 完成时间:2011 年 3 月8 日
造斜率由工具本身确定,不受钻进地层岩性的影响,在软地层及不均质地层中效果明显,缺点是钻柱承受高强度的交变应力,钻柱容易发生疲劳破坏。另外,高精度加工是保证这种系统导向效果的关键。 2.1.2AutoTrak旋转导向钻井系统 AutoTrak系统是一套集钻进和随钻测量为一体的定向钻井系统,能够在旋转钻井过程向造斜钻进,主要是因为它有一个独特的非旋转可调扶正器滑套,此扶正器滑套并非真的不旋转,只是相对钻头驱动轴而言它几乎是不旋转,因此在旋转钻进过程中,此扶正器滑套可以保持一种相对静止的状态,从而保证钻头沿着某一特定的方向钻进.非旋转扶正器滑套有元件:近钻头井斜传感器、电子控制元件、液压控制阀和活塞,见图1.通过液压可推动活塞分别对3 个稳定块施加不同的压力,其合力就使钻具沿某一特定方向偏移,从而在钻进过程中使钻头产生1 个侧向力,保证钻头沿这一方向定向钻进. 图1 AutoTrak部结构 2.1.3 Power Drive旋转导向钻井系统 斯伦贝谢公司的旋转导向系统主要是指PowerDrive系统,包括PowerDrive X5110 、PowerDrive X5900 、PowerDrive X5 、PowerDrive X5675 、PowerDrive X5475 、PowerDrive Xceed 900、Power vorteX ,除了Power vorteX 是动力式旋转导向系统外,其他均为全旋转式旋转导向系统,PowerDrive X5 系列旋转导向工具可通过PowerPulse 和TeleScope工具实时测量井下数据,测量近钻头地层状态、钻头振动情况和钻头转速,利用近钻头伽马射线显示地质和井眼成像,自动纠斜。它适用的井眼尺寸为5.25~26 in ,可用常规钻井液,最高耐温150 ℃,流量围480 ~1900 gpm ,最高耐压20000 psi ,其中,PowerDrive X51100 型最大转速200 r/min ,最大造斜率3°/100 f t ,PowerDrive X5475 型最大转速250 r/min ,最大造斜率
旋转导向钻井技术及Power-V
旋转导向钻井技术及Power-V导向系统介绍 摘要:旋转导向钻井技术主要指井眼轨迹自动控制的闭环自动钻井技术,是20世纪90年代初期发展起来的一项钻井新技术,代表着当今国际钻井技术的最新发展方向,对超深井、超薄油层水平井、大位移井、分支水平井等轨迹控制具有独特效果。本文分析了旋转导向钻井系统的技术特点,介绍了国内外旋转导向钻井系统的发展、应用情况。并详细介绍了斯伦贝谢公司旋转导向系统Power-V的组成和工作原理。 1.概述 所谓旋转导向钻井,是指钻柱在旋转钻进过程中实现过去只有传统泥浆马达才能实现的准确增斜、稳斜、降斜或者纠方位功能。旋转导向钻井技术的核心是旋转导向钻井系统,如图1所示。它主要由井下旋转自动导向钻井系统、地面监控系统和将上述2部分联系在一起的双向通讯技术3部分组成。旋转导向钻井系统的核心是井下旋转导向工具,旋转导向钻井系统主要由以下几部分组成: ①测量系统:包括近钻头井斜测量、地层评价测量,MWD/LWD随钻测量仪器等,用于监测井眼轨迹的井斜、方位及地层情况等基本参数。 ②控制系统:接收测量系统的信息或对地面的控制指令进行处理,并根据预置的控制软件和程序,控制偏置导向机构的动作。 图1 旋转自动导向钻井系统功能框图 2.旋转导向钻井技术的特点 旋转导向钻井技术与传统的滑动导向方式相比有如下突出特点: ①旋转导向代替了传统的滑动钻进:一方面大大提高了钻井速度,另一方面
解决了滑动导向方式带来的诸如井身质量差、井眼净化效果差及极限位移限制等缺点,从而大大提高了钻井安全性,解决了大位移井的导向问题; ②具有不必起下钻自动调整钻具导向性能的能力,大大提高了钻井效率和井眼轨迹控制的灵活性,可满足高难特殊工艺井的导向钻井需要; ③具有井下闭环自动导向的能力,结合地质导向技术使用,使井眼轨迹控制精度大大提高。 旋转导向钻井技术的上述特点,使其可以大大提高油气开发能力和开发效率,降低钻井成本和开发成本,满足了油气勘探开发形势的需要。 3.国内外旋转导向钻井系统发展应用情况 目前,国外旋转自动导向钻井系统研究、应用成熟的有3种(如图2):Baker Hughes Inteq公司的Auto Trak系统,Halliburton Sperry-sun公司的Geo-Pilot 系统,以及Schlumberger Anadrill公司的Power Drive系统。其中,旋转导向钻井系统形成了两大发展方向:一、不旋转外筒式闭环自动导向钻井系统: Auto Trak 和Geo-Pilot;二、全旋转自动导向钻井统:Power Drive。 图2 国外3种旋转导向工具原理图 3.1 Auto Trak旋转导向钻井系统 Baker Hughes Inteq在1997年推出的Auto Trak。截止到2000年上半年,该系统已下井575次,井下工作时间累计7万小时,总进尺100万米。其6 3/4“系统创下了单次下井工作时间92h,进尺2986m的世界纪录,8 1/4”系统创下了单次下井工作时间167h,进尺3620m的世界纪录。