线性控制第二章答案
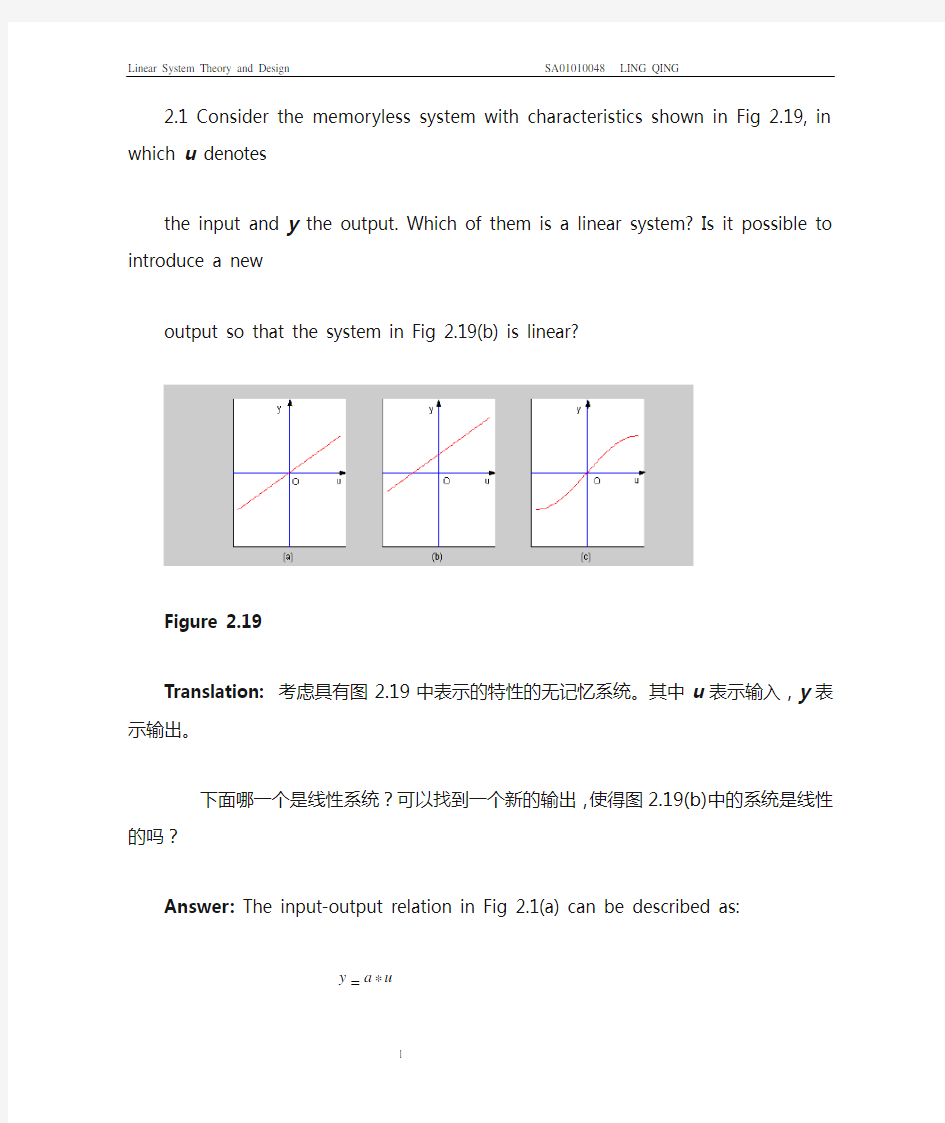

2.1 Consider the memoryless system with characteristics shown in Fig 2.19, in which u denotes the input and y the output. Which of them is a linear system? Is it possible to introduce a new output so that the system in Fig 2.19(b) is linear?
Figure 2.19
Translation: 考虑具有图2.19中表示的特性的无记忆系统。其中u 表示输入,y 表示输出。 下面哪一个是线性系统?可以找到一个新的输出,使得图2.19(b)中的系统是线性
的吗?
Answer: The input-output relation in Fig 2.1(a) can be described as: u a y *=
Here a is a constant. It is a memoryless system. Easy to testify that it is a linear system. The input-output relation in Fig 2.1(b) can be described as: b u a y +=*
Here a and b are all constants. Testify whether it has the property of additivity. Let: b u a y +=11* b u a y +=22* then:
b u u a y y *2)(*)(2121++=+
So it does not has the property of additivity, therefore, is not a linear system. But we can introduce a new output so that it is linear. Let: b y z -=
u a z *=
z is the new output introduced. Easy to testify that it is a linear system. The input-output relation in Fig 2.1(c) can be described as: u u a y *)(=
a(u) is a function of input u . Choose two different input, get the outputs:
111*u a y =
222*u a y =
Assure:
21a a ≠ then:
221121**)(u a u a y y +=+
So it does not has the property of additivity, therefore, is not a linear system.
2.2 The impulse response of an ideal lowpass filter is given by )
(2)
(2sin 2)(00t t t t t g --=ωωω
for all t , where w and to are constants. Is the ideal lowpass filter causal? Is is possible to built the filter in the real world?
Translation: 理想低通滤波器的冲激响应如式所示。对于所有的t ,w 和to ,都是常数。理
想低通滤波器是因果的吗?现实世界中有可能构造这种滤波器吗?
Answer: Consider two different time: ts and tr , ts < tr , the value of g(ts-tr) denotes the output at
time ts , excited by the impulse input at time tr . It indicates that the system output at time ts is dependent on future input at time tr . In other words, the system is not causal. We know that all physical system should be causal, so it is impossible to built the filter in the real world.
2.3 Consider a system whose input u and output y are related by
?
??>≤==a t for a
t for t u t u P t y a 0)(:))(()(
where a is a fixed constant. The system is called a truncation operator, which chops off the
input after time a . Is the system linear? Is it time-invariant? Is it causal?
Translation: 考虑具有如式所示输入输出关系的系统,a 是一个确定的常数。这个系统称作 截断器。它截断时间a 之后的输入。这个系统是线性的吗?它是定常的吗?是因果 的吗?
Answer: Consider the input-output relation at any time t, t<=a : u y =
Easy to testify that it is linear.
Consider the input-output relation at any time t, t>a : 0=y
Easy to testify that it is linear. So for any time, the system is linear.
Consider whether it is time-invariable. Define the initial time of input to , system input is u(t), t>=to . Let to=to :
??
?≤≤=t
other for a
t t for t u t y 0)()(0
Shift the initial time to to+T . Let to+T>a , then input is u(t-T), t>=to+T . System output: 0)('=t y
Suppose that u(t) is not equal to 0, y’(t) is not equal to y(t-T). According to the definition,
this system is not time-invariant.
For any time t , system output y(t) is decided by current input u(t) exclusively. So it is a
causal system.
2.4 The input and output of an initially relaxed system can be denoted by y=Hu , where H is some mathematical operator. Show that if the system is causal, then u HP P Hu P y P a a a a ==
where Pa is the truncation operator defined in Problem 2.3. Is it true PaHu=HPau ?
Translation: 一个初始松弛系统的输入输出可以描述为:y=Hu ,这里H 是某种数学运算,
说明假如系统是因果性的,有如式所示的关系。这里Pa 是题2.3中定义的截断函数。PaHu=HPau 是正确的吗?
Answer: Notice y=Hu , so:
Hu P y P a a =
Define the initial time 0, since the system is causal, output y begins in time 0.
If a<=0,then u=Hu . Add operation PaH in both left and right of the equation: u HP P Hu P a a a = If a>0, we can divide u to 2 parts: ??
?≤≤=t
other for a
t for t u t p 00)()(
?
?
?>=t other for a
t for t u t q 0)()(
u(t)=p(t)+q(t). Pay attention that the system is casual, so the output excited by q(t) can’t
affect that of p(t). It is to say, system output from 0 to a is decided only by p(t). Since PaHu chops off Hu after time a , easy to conclude PaHu=PaHp(t). Notice that p(t)=Pau , also we have: u HP P Hu P a a a =
It means under any condition, the following equation is correct: u HP P Hu P y P a a a a ==
PaHu=HPau is false. Consider a delay operator H , Hu(t)=u(t-2), and a =1, u(t) is a step
input begins at time 0, then PaHu covers from 1 to 2, but HPau covers from 1 to 3.
2.5 Consider a system with input u and output y . Three experiments are performed on the system using the inputs u1(t), u2(t) and u3(t) for t >=0. In each case, the initial state x(0) at time t =0 is the same. The corresponding outputs are denoted by y1,y2 and y
3. Which of the following statements are correct if x(0)<>0?
1. If u3=u1+u2, then y3=y1+y
2.
2. If u3=0.5(u1+u2), then y3=0.5(y1+y2).
3. If u3=u1-u2, then y3=y1-y2.
Translation: 考虑具有输入u 输出y 的系统。在此系统上进行三次实验,输入分别为u1(t),
u2(t) 和u3(t),t >=0。每种情况下,零时刻的初态x(0)都是相同的。相应的输出表示为y1,y2 和y3。在x(0)不等于零的情况下,下面哪种说法是正确的?
Answer: A linear system has the superposition property:
0221102211022011),()(),()()()(t t t y t y t t t u t u t x t x ≥+→?
??
≥++αααααα
In case 1: 11=α 12=α
)0()0(2)()(022011x x t x t x ≠=+αα
So y3<>y1+y2. In case 2: 5.01=α 5.02=α
)0()()(022011x t x t x =+αα
So y3=0.5(y1+y2). In case 3: 11=α 12-=α
)0(0)()(022011x t x t x ≠=+αα
So y3<>y1-y2.
2.6 Consider a system whose input and output are related by
?
??=-≠--=0)1(00
)1()1(/)()(2t u if t u if t u t u t y
for all t .
Show that the system satisfies the homogeneity property but not the additivity property. Translation: 考虑输入输出关系如式的系统,证明系统满足齐次性,但是不满足可加性. Answer: Suppose the system is initially relaxed, system input: )()(t u t p α=
a is any real constant. Then system output q(t):
???=-≠--=0)1(00
)1()1(/)()(2t p if t p if t p t p t q
?
??=-≠--=0)1(00
)1()1(/)(2t u if t u if t u t u α
So it satisfies the homogeneity property.
If the system satisfies the additivity property, consider system input m(t) and n(t),
m(0)=1, m(1)=2; n(0)=-1, n(1)=3. Then system outputs at time 1 are: 4)0(/)1()1(2==m m r 9)0(/)1()1(2-==n n s
0)]0()0(/[)]1()1([)1(2=++=n m n m y
)1()1(s r +≠
So the system does not satisfy the additivity property.
2.7 Show that if the additivity property holds, then the homogeneity property holds for all rational numbers a . Thus if a system has “continuity” property, then additivity implies homogeneity. Translation: 说明系统如果具有可加性,那么对所有有理数a 具有齐次性。因而对具有某种
连续性质的系统,可加性导致齐次性。
Answer: Any rational number a can be denoted by:
n m a /=
Here m and n are both integer. Firstly, prove that if system input-output can be described
as following:
y x → then:
my mx →
Easy to conclude it from additivity.
Secondly, prove that if a system input-output can be described as following: y x → then:
n y n x //→ Suppose:
u n x →/ Using additivity:
nu x n x n →=)/(* So:
nu y = n y u /=
It is to say that:
n y n x //→ Then:
n m y n m x /*/*→ ay ax →
It is the property of homogeneity.
2.8 Let g(t,T)=g(t+a,T+a) for all t,T and a . Show that g(t,T) depends only on t-T .
Translation: 设对于所有的t,T 和 a ,g(t,T)=g(t+a,T+a)。说明g(t,T)仅依赖于t-T 。 Answer: Define:
T t x += T t y -= So:
2y x t += 2
y
x T -= Then:
)2,2(),(y
x y x g T t g -+= )2
,2(a y
x a y x g +-++= )2
2,22(y
x y x y x y x g +-+-+-++= )0,(y g = So:
0)0,(),(=??=??x
y g x T t g It proves that g(t,T) depends only on t-T .
2.9 Consider a system with impulse response as shown in Fig2.20(a). What is the zero-state response excited by the input u(t) shown in Fig2.20(b)?
Fig2.20
Translation: 考虑冲激响应如图2.20(a)所示的系统,由如图2.20(b)所示输入u(t)激励的零状 态响应是什么?
Answer: Write out the function of g(t) and u(t): ??
?≤≤-≤≤=2
121
0)(t t t t t g
?
??≤≤-≤≤=2111
01)(t t t u
then y(t) equals to the convolution integral:
?-=
t
dr r t u r g t y 0)()()(
If 0= ?=t rdr t y 0 )(22 t = If 1<=t <=2: )(t y ?--= 1 )()(t dr r t u r g ?--+1 1 )()(t dr r t u r g ?-+t dr r t u r g 1 )()( )(1t y =)(2t y +)(3t y + Calculate integral separately: )(1t y ?--= 1 0)()(t dr r t u r g 10≤≤r 21≤-≤r t ?--=1 t rdr 2)1(2 --=t )(2t y ?--= 1 1)()(t dr r t u r g 10≤≤r 10≤-≤r t ?-=1 1 t rdr 2)1(212 --=t )(3t y ? -=t dr r t u r g 1 )()( 21≤≤r 10≤-≤r t ?-=t dr r 1 )2(21 )1(22---=t t )(t y )(1t y =)(2t y +)(3t y +242 32 -+- =t t 2.10 Consider a system described by u u y y y -=-+? ???32 What are the transfer function and the impulse response of the system? Translation: 考虑如式所描述的系统,它的传递函数和冲激响应是什么? Answer: Applying the Laplace transform to system input-output equation, supposing that the System is initial relaxed: )()()(3)(2)(2s Y s sY s Y s sY s Y s -=-+ System transfer function: 3 1 321)()()(2+= -+-==s s s s s Y s U s G Impulse response: t e s L s G L t g 31 1 ]3 1 [ )]([)(---=+== 2.11 Let y(t) be the unit-step response of a linear time-invariant system. Show that the impulse response of the system equals dy(t)/dt. Translation: y(t)是线性定常系统的单位阶跃响应。说明系统的冲激响应等于dy(t)/dt . Answer: Let m(t) be the impulse response, and system transfer function is G(s): s s G s Y 1 *)()(= )()(s G s M = s s Y s M *)()(= So: dt t dy t m /)()(= 2.12 Consider a two-input and two-output system described by )()()()()()()()(212111212111t u p N t u p N t y p D t y p D +=+ )()()()()()()()(222121222121t u p N t u p N t y p D t y p D +=+ where Nij and Dij are polynomials of p:=d/dt . What is the transfer matrix of the system? Translation: 考虑如式描述的两输入两输出系统, Nij 和Dij 是p:=d/dt 的多项式。系统的 传递矩阵是什么? Answer: For any polynomial of p , N(p), its Laplace transform is N(s). Applying Laplace transform to the input-output equation: )()()()()()()()(212111212111s U s N s U s N s Y s D s Y s D +=+ )()()()()()()()(222121222121s U s N s U s N s Y s D s Y s D +=+ Write to the form of matrix: ?????????? ??)()()()()()(2122211211s Y s Y s D s D s D s D =? ? ? ?????????)()()()()()(2122211211s U s U s N s N s N s N ??????)()(21s Y s Y =1 22211211)()()() (-?? ????s D s D s D s D ?? ? ?????????)()()()()()(2122211211s U s U s N s N s N s N So the transfer function matrix is: )(s G =1 22211211)()()()(-? ?? ???s D s D s D s D ?? ????)()()()(2221 1211s N s N s N s N By the premising that the matrix inverse: 1 22211211)()()()(-?? ? ???s D s D s D s D exists. 2.11 Consider the feedback systems shows in Fig2.5. Show that the unit-step responses of the positive-feedback system are as shown in Fig2.21(a) for a=1 and in Fig2.21(b) for a=0.5. Show also that the unit-step responses of the negative-feedback system are as shown in Fig 2.21(c) and 2.21(d), respectively, for a =1 and a =0.5. Fig 2.21 Translation: 考虑图2.5中所示反馈系统。说明正反馈系统的单位阶跃响应,当a =1时,如 图2.21(a)所示。当a =0.5时,如图2.21(b)所示。说明负反馈系统的单位阶跃响应如图2.21(c)和2.21(b)所示,相应地,对a =1和a =0.5。 Answer: Firstly, consider the positive-feedback system. It’s impulse response is: ∑∞ =-= 1 )()(i i i t a t g δ Using convolution integral: ∑∞ =-= 1 )()(i i i t r a t y When input is unit-step signal: ∑== n i i a n y 1 )( )()(n y t y = 1+≤≤n t n Easy to draw the response curve, for a =1 and a =0.5, respectively, as Fig 2.21(a) and Fig 2.21(b) shown. Secondly, consider the negative-feedback system. It’s impulse response is: ∑∞ =--- =1)()()(i i i t a t g δ Using convolution integral: ∑∞ =--- =1 )()()(i i i t r a t y When input is unit-step signal: ∑=-- =n i i a n y 1 ) ()( )()(n y t y = 1+≤≤n t n Easy to draw the response curve, for a =1 and a =0.5, respectively, as Fig 2.21(c) and Fig 2.21(d) shown. 2.14 Draw an op-amp circuit diagram for u x x ? ? ? ???-+???? ??-=? 425042 []u x y 2103-= 2.15 Find state equations to describe the pendulum system in Fig 2.22. The systems are useful to model one- or two-link robotic manipulators. If θ, 1θ and 2θ are very small, can you consider the two systems as linear? Translation: 试找出图2.22所示单摆系统的状态方程。这个系统对研究一个或两个连接的机 器人操作臂很有用。假如角度都很小时,能否考虑系统为线性? Answer: For Fig2.22(a), the application of Newton ’s law to the linear movements yields: )c o s s i n ()c o s (c o s 222 θθθθθθ ???--==-ml l dt d m mg f )s i n c o s ()s i n (s i n 222 θθθθθθ???-==-ml l dt d m f u Assuming θ and ? θ to be small, we can use the approximation θsin =θ, θcos =1. By retaining only the linear terms in θ and ? θ, we obtain mg f = and: u ml l g 1+- =? ?θθ Select state variables as θ=1x , ? =θ2x and output θ=y u ml x l g x ?? ? ???+???? ??-=? /110/10 []x y 01= For Fig2.22(b), the application of Newton ’s law to the linear movements yields: )c o s (c o s c o s 1122 112211θθθ l dt d m g m f f =-- )cos sin (12 11111θθθθ?? ?--=l m )s i n (s i n s i n 1122 11122θθθl dt d m f f =- )sin cos (12 11111θθθθ?? ?-=l m )c o s c o s (c o s 221122 2222θθθ l l dt d m g m f +=- )cos sin (12 11112θθθθ?? ?--=l m )cos sin (22 22222θθθθ? ? ?--+l m )s i n s i n (s i n 221122 222θθθl l dt d m f u +=- )sin cos (12 11112θθθθ?? ?-=l m )sin cos (22 22222θθθθ? ? ?-+l m Assuming 1θ, 2θand 1?θ, 2? θ to be small, we can use the approximation 1sin θ=1θ, 2sin θ=2θ, 1cos θ=1, 2cos θ=1. By retaining only the linear terms in 1θ, 2θ and 1?θ, 2? θ, we obtain g m f 22=, g m m f )(211+= and: 21 12111211)(θθθl m g m l m g m m ++- =? ? u l m l m g m m l m g m m 2 2221211212121 )()(++-+= ? ?θθθ Select state variables as 11θ=x ,12? =θx ,23θ=x ,24? =θx and output ?? ? ???=??????2121θθy y : ? ? ???????????????????? ??+-++-= ?????? ????????????43212 2212 1211 121 12143210/)(0/)(10 00/0/)(0010x x x x l m g m m l m g m m l m g m l m g m m x x x x +u l m ?????? ??? ?? ?22/1000 ? ???? ?=??????010*******y y ????? ? ??????4321x x x x 2.17 The soft landing phase of a lunar module descending on the moon can be modeled as shown in Fig2.24. The thrust generated is assumed to be proportional to the derivation of m , where m is the mass of the module. Then the system can be described by mg m k y m --=? ? ? Where g is the gravity constant on the lunar surface. Define state variables of the system as: y x =1, ? =y x 2, m x =3, ? =m y Find a state-space equation to describe the system. Translation: 登月舱降落在月球时,软着陆阶段的模型如图2.24所示。产生的冲激力与m 的微分成正比。系统可以描述如式所示形式。g 是月球表面的重力加速度常数。定义状态变量如式所示,试图找出系统的状态空间方程描述。 Answer: The system is not linear, so we can linearize it. Suppose: -+-=y gt y 2/2 -? ?+-=y gt y -? ?? ?+-=y g y -+=m m m 0 -? ? =m m So: )(0- +m m -??+-)(y g =-? -m k g m m )(0- +- +--- g m g m 0-? ?=y m 0-? -m k g m g m - --0 -? ?=y m 0-? -m k Define state variables as: - - =y x 1, - ? - =y x 2, - - =m x 3, -? - =m y Then: ? ?????? ?? ?????????? -?-?-321x x x =??????????000000010???????? ??????????---3 21x x x +???? ? ?????-1/00m k -u -y =[]001????? ? ?? ??????????---321x x x 2.19 Find a state equation to describe the network shown in Fig2.26.Find also its transfer function. Translation: 试写出描述图2.26所示网络的状态方程,以及它的传递函数。 Answer: Select state variables as: 1x : V oltage of left capacitor 2x : V oltage of right capacitor 3x : Current of inductor Applying Kirchhoff’s current law: 3x =R x L x /)(32? - R x x C u 11+=? 32x x C u +=? 2x y = From the upper equations, we get: C u CR x x //11+-=? u x +-=1 C u C x x //32+-=?u x +-=3 L Rx L x x //323-=?32x x -= 2x y = They can be combined in matrix form as: ??????? ??????????321x x x =??????? ???---110100001??????????321x x x +u ????? ?????011 []???? ? ?????=321010x x x y Use MATLAB to compute transfer function. We type: A=[-1,0,0;0,0,-1;0,1,-1]; B=[1;1;0]; C=[0,1,0]; D=[0]; [N1,D1]=ss2tf(A,B,C,D,1) Which yields: N1 = 0 1.0000 2.0000 1.0000 D1 = 1.0000 2.0000 2.0000 1.0000 So the transfer function is: 1 221 2)(2 32^ +++++=s s s s s s G 112+++=s s s 2.20 Find a state equation to describe the network shown in Fig2.2. Compute also its transfer matrix. Translation: 试写出描述图2.2所示网络的状态方程,计算它的传递函数矩阵。 Answer: Select state variables as Fig 2.2 shown. Applying Kirchhoff’s current law: 1u =323121111x R x L x x x C R ++++? ? 22211? ? =+x C u x C 223? =x C x 3231212311)(x R x L x x u x R u ++++-=? 3231x R x L y +=? From the upper equations, we get: 12131//C u C x x -=? 232/C x x =? 12111131112113///)(//L u R L u L x R R L x L x x +++---=? 2113121u R u x R x x y ++---= They can be combined in matrix form as: ??????? ?????? ????321x x x =?? ?? ??????+---1211 12 1 /)(/10 0/100L R R L L C C ??????????321x x x +?????????? ? ?????-211111/0/1/100 u u L R C L []?? ?? ? ?????---=321111x x x R y +[]??????2121u u R Applying Laplace Transform to upper equations: ) (/1/1)(1^211112 1^ s u s C s C R R s L R s L s y +++++= )(/1/1) /1)((2^211112121s u s C s C R R s L s C R R s L +++++++ ???+++++=s C s C R R s L R s L s G 2111121^ /1/1)( ?? ? ++++++s C s C R R s L s C R R s L 211112121/1/1)/1)(( 2.18 Find the transfer functions from u to 1y and from 1y to y of the hydraulic tank system shown in Fig2.25. Does the transfer function from u to y equal the product of the two transfer functions? Is this also true for the system shown in Fig2.14? Translation: 试写出图2.25所示水箱系统从u 到1y 的传递函数和从1y 到y 的传递函数。从 u 到y 的传递函数等于两个传递函数的乘积吗?这对图2.14所示系统也是正确的吗? Answer: Write out the equation about u ,1y and y : 111/R x y = 222/R x y = dt y u dx A /)(111-= dt y y dx A /)(122-= Applying Laplace transform: )1/(1/11^ 1^s R A u y += )1/(1/221^ ^s R A y y += )1)(1/(1/2211^ ^ s R A s R A u y ++= So: =^^ /u y )/(^1^u y )/(1^ ^y y But it is not true for Fig2.14, because of the loading problem in the two tanks. 4-1将下述特征方程化为适合于用根轨迹法进行分析的形式,写出等价的系统开环传递函数。 (1)210s cs c +++=,以c 为可变参数。 (2)3(1)(1)0s A Ts +++=,分别以A 和T 为可变参数。 (3)1()01I D P k k s k G s s s τ?? ++ + =? ?+? ? ,分别以P k 、I K 、T 和τ为可变参数。 4-2设单位反馈控制系统的开环传递函数为 (31)()(21) K s G s s s += + 试用解析法绘出开环增益K 从0→+∞变化时的闭环根轨迹图。 4-2已知开环零极点分布如下图所示,试概略绘出相应的闭环根轨迹图。 4-3设单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标)。 (1)()(0.21)(0.51)K G s s s s = ++ (2)(1)()(21) K s G s s s +=+ (3)(5)()(2)(3) K s G s s s s += ++ 4-4已知单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求算出起始角)。 (1)(2) ()(12)(12) K s G s s s j s j += +++- (2)(20) ()(1010)(1010) K s G s s s j s j +=+++- 4-5设单位反馈控制系统开环传递函数如为 * 2 ()()(10)(20) K s z G s s s s += ++ 试确定闭环产生纯虚根1j ±的z 值和*K 值。 4-6已知系统的开环传递函数为 * 2 2 (2)()()(49) K s G s H s s s += ++ 试概略绘出闭环根轨迹图。 4-7设反馈控制系统中 * 2 ()(2)(5) K G s s s s = ++ (1)设()1H s =,概略绘出系统根轨迹图,判断闭环系统的稳定性 (2)设()12H s s =+,试判断()H s 改变后的系统稳定性,研究由于()H s 改变所产生的影响。 4-8试绘出下列多项式的根轨迹 (1)322320s s s Ks K ++++= (2)323(2)100s s K s K ++++= 4-9两控制系统如下图所示,试问: (1)两系统的根轨迹是否相同?如不同,指出不同之处。 (2)两系统的闭环传递函数是否相同?如不同,指出不同之处。 (3)两系统的阶跃响应是否相同?如不同,指出不同之处。 4-10设系统的开环传递函数为 12 (1)(1) ()K s T s G s s ++= (1)绘出10T =,K 从0→+∞变化时系统的根轨迹图。 (2)在(1)的根轨迹图上,求出满足闭环极点阻尼比0.707ξ=的K 的值。 (3)固定K 等于(2)中得到的数值,绘制1T 从0→+∞变化时的根轨迹图。 (4)从(3)的根轨迹中,求出临界阻尼的闭环极点及相应的1T 的值。 4-11系统如下图所示,试 (1)绘制0β=的根轨迹图。 (2)绘制15K =,22K =时,β从0→+∞变化时的根轨迹图。 (3)应用根轨迹的幅值条件,求(2)中闭环极点为临界阻尼时的β的值。 第二章 矩阵及其运算 1 已知线性变换 ?????++=++=++=3 213321232113235322y y y x y y y x y y y x 求从变量x 1 x 2 x 3到变量y 1 y 2 y 3的线性变换 解 由已知 ? ??? ?????? ? ?=???? ??221321323513122y y y x x x 故 ???? ?????? ? ?=???? ??-3211 221323513122x x x y y y ? ??? ?????? ??----=321423736 947y y y ?????-+=-+=+--=3 21332123 211423736947x x x y x x x y x x x y 2 已知两个线性变换 ?????++=++-=+=321332123 11542322y y y x y y y x y y x ?????+-=+=+-=3 233122 11323z z y z z y z z y 求从z 1 z 2 z 3到x 1 x 2 x 3的线性变换 解 由已知 ???? ?????? ? ?-=???? ??221321514232102y y y x x x ??? ? ?????? ??--???? ??-=32131 010 2013514232102z z z ??? ? ?????? ??----=321161109412316z z z 所以有?????+--=+-=++-=3 21332123 2111610941236z z z x z z z x z z z x 3 设???? ??--=111111111A ??? ? ??--=150421321B 求3AB 2A 及A T B 解 ??? ? ??---???? ??--???? ??--=-1111111112150421321111111111323A AB ???? ??----=???? ??---???? ??-=2294201722213211111111120926508503 ??? ? ??-=???? ??--???? ??--=092650850150421321111111111B A T 4 计算下列乘积 (1)??? ? ?????? ??-127075321134 解 ???? ?????? ??-127075321134???? ???+?+??+?-+??+?+?=102775132)2(71112374??? ? ??=49635 (2)???? ??123)321( 解 ??? ? ??123)321((132231)(10) 第2章线性表 一选择题 1.下述哪一条是顺序存储结构的优点?( A ) A.存储密度大 B.插入运算方便 C.删除运算方 便 D.可方便地用于各种逻辑结构的存储表示 2.下面关于线性表的叙述中,错误的是哪一个?( B )A.线性表采用顺序存储,必须占用一片连续的存储单元。B.线性表采用顺序存储,便于进行插入和删除操作。 C.线性表采用链接存储,不必占用一片连续的存储单元。D.线性表采用链接存储,便于插入和删除操作。 3.线性表是具有n个( C )的有限序列(n>0)。 A.表元素 B.字符 C.数据元 素 D.数据项 E.信息项 4.若某线性表最常用的操作是存取任一指定序号的元素和在最后进行插入和删除运算,则利用( A )存储方式最节省时间。 AHA12GAGGAGAGGAFFFFAFAF A.顺序表 B.双链表 C.带头结点的双循环链表 D.单循环链表 5.某线性表中最常用的操作是在最后一个元素之后插入一个元素和删除第一个元素,则采用( D )存储方式最节省运算时间。 A.单链表 B.仅有头指针的单循环链 表 C.双链表D.仅有尾指针的单循环链表 6.设一个链表最常用的操作是在末尾插入结点和删除尾结点,则选用( D )最节省时间。 A. 单链表 B.单循环链表 C. 带尾指针的单循环链表 D.带头结点的双循环链表 7.若某表最常用的操作是在最后一个结点之后插入一个结点或删除最后一个结点。则采用( D )存储方式最节省运算时间。 AHA12GAGGAGAGGAFFFFAFAF A.单链表 B.双链表 C.单循环链 表 D.带头结点的双循环链表 8. 静态链表中指针表示的是( BC ). A.内存地址 B.数组下标 C.下一元素地址D.左、右孩子地址 9. 链表不具有的特点是( C ) A.插入、删除不需要移动元素 B.可随机访问任一元素C.不必事先估计存储空间 D.所需空间与线性长度成正比 10. 下面的叙述不正确的是( BC ) A.线性表在链式存储时,查找第i个元素的时间同i的值成正比 AHA12GAGGAGAGGAFFFFAFAF Linear Systems Theory: A Structural Decomposition Approach 线性系统理论: 结构分解法 Ben M. Chen (陈本美) 新加坡国立大学 Zongli Lin(林宗利) 美国弗吉尼亚大学 Yacov Shamash (雅科夫 司马诩) 美国纽约州立大学石溪分校 此书献给我们的家人 前两位作者谨以这中译版献给他们的母校 厦门大学 目录 绪论 1 导论和预览 1.1 背景 1.2 各章预览 1.3 符号和术语 2 数学基础 2.1 导论 2.2 矢量空间和子空间 2.3 矩阵代数和特性 2.3.1 行列式、逆和求导 2.3.2 秩、特征值和约当型 2.3.3 特殊矩阵 2.3.4 奇异值分解 2.4 范数 2.4.1 矢量范数 2.4.2矩阵范数 2.4.3 连续时间信号范数 2.4.4 离散时间信号范数 2.4.5 连续时间系统范数 2.4.6 离散时间系统范数 3 线性系统理论复习 3.1 导论 3.2 动态响应 3.3 系统稳定性 3.4 可控性和可观性 3.5 系统可逆性 3.6 常态秩、有限零点和无限零点3.7 几何子空间 3.8 状态反馈和输出馈入的特性3.9 练习 4 无驱动和/或无检测系统的分解 4.1 导论 4.2 自治系统 4.3 无驱动系统 4.4 无检测系统 4.5 练习 5. 正则系统的分解 5.1 导论 5.2 SISO系统 5.3 严格正则系统 5.4 非严格正则系统 5.5 结构化分解特性的证明 5.6 系统矩阵的Kronecker型和Smith型5.7 离散时间系统 5.8 练习 6 奇异系统的分解 6.1 导论 6.2 SISO奇异系统 6.3 MIMO描述系统 6.4 定理6.3.1的证明和性质 6.5 离散时间奇异系统 6.6 练习 7 双线性变换的结构化映射 7.1 导论 7.2 连续到离散时间系统的映射 7.3 离散时间到连续时间系统的映射7.4 定理7.2.1的证明 7.5 练习 8 系统因子分解 8.1 导论 8.2 严格正则系统 8.3 非严格正则系统 8.4 离散时间系统 8.5 练习 9 通过选择传感器/执行器实现的结构配置9.1 导论 9.2 同时有限和无限零点结构配置 9.2.1 SISO系统 9.2.2 MIMO系统 第二章矩阵 一、知识点复习 1、矩阵的定义 由m n个数排列成的一个m行n列的表格,两边界以圆括号或方括号,就成为一个m n型矩阵。例如 2 -1 0 1 1 1 1 1 0 2 2 5 4 -2 9 3 3 3 -1 8 是一个45矩阵. 一个矩阵中的数称为它的元素,位于第i行第j列的数称为(i,j)位元素。 元素全为0的矩阵称为零矩阵,通常就记作0。 两个矩阵A和B相等(记作A=B),是指它的行数相等,列数也相等(即它们的类型相同),并且对应的元素都相等。 2、 n阶矩阵与几个特殊矩阵 行数和列数相等的矩阵称为方阵,行列数都为n的矩阵也常常叫做n阶矩阵。 n阶矩阵的从左上角到右下角的对角线称为主对角线。 下面列出几类常用的n阶矩阵,它们都是考试大纲中要求掌握的. 对角矩阵: 对角线外的的元素都为0的n阶矩阵. 单位矩阵: 对角线上的的元素都为1的对角矩阵,记作E(或I). 数量矩阵: 对角线上的的元素都等于一个常数c的对角矩阵,它就是c E. 上三角矩阵: 对角线下的的元素都为0的n阶矩阵. 下三角矩阵: 对角线上的的元素都为0的n阶矩阵. 对称矩阵: 满足A T=A矩阵,也就是对任何i,j,(i,j)位的元素和(j,i)位的元素总是相等的n阶矩阵. 反对称矩阵:满足A T=-A矩阵.也就是对任何i,j,(i,j)位的元素和(j ,i)位的元素之和总等于0的n阶矩阵.反对称矩阵对角线上的元素一定都是0.) 正交矩阵:若AA T=A T A=E,则称矩阵A是正交矩阵。 (1)A是正交矩阵?A T=A-1 (2)A是正交矩阵?2 A=1 阶梯形矩阵:一个矩阵称为阶梯形矩阵,如果满足: ①如果它有零行,则都出现在下面。 ②如果它有非零行,则每个非零行的第一个非0元素所在的列号自上而下严 格单调递增。 把阶梯形矩阵的每个非零行的第一个非0元素所在的位置称为台角。 每个矩阵都可以用初等行变换化为阶梯形矩阵,这种运算是在线性代数的各类 计算题中频繁运用的基本运算,必须十分熟练。 请注意:一个矩阵用初等行变换化得的阶梯形矩阵并不是唯一的,但是其非零 行数和台角位置是确定的。 3、矩阵的线形运算 (1)加(减)法:两个m n的矩阵A和B可以相加(减),得到的和(差)仍是m n 矩阵,记作A+B (A-B),运算法则为对应元素相加(减). (2)数乘: 一个m n的矩阵A与一个数c可以相乘,乘积仍为m n的矩阵, 记作c A,运算法则为A的每个元素乘c. 这两种运算统称为线性运算,它们满足以下规律: ①加法交换律:A+B=B+A. 2加法结合律:(A+B)+C=A+(B+C). ③加乘分配律:c(A+B)=c A+c B.(c+d)A=c A+d A. ④数乘结合律: c(d)A=(cd)A. ⑤ c A=0 c=0 或A=0. 4、矩阵乘法的定义和性质 (1)当矩阵A的列数和B的行数相等时,则A和B可以相乘,乘积记作AB. AB的行数和A相等,列数和B相等. AB的(i,j)位元素等于A的第i个行向量 和B的第j个列向量(维数相同)对应分量乘积之和. 第2章线性表习题解答 第2章习题 (2) 第2章习题 2.1若将顺序表中记录其长度的分量listlen改为指向最后一个元素的位置last,在实现各基本运算时需要做那些修改? 【解】 //用线性表最后一个元素的下标last代替listLen实现顺序表 #define MAXLEN 100 typedef int elementType; typedef struct sllLast { elementType data[MAXLEN]; int last; }seqList; //初始化 void initialList(seqList &S) { https://www.360docs.net/doc/011313184.html,st=-1; } //求表长度 int listLength(seqList S) { return https://www.360docs.net/doc/011313184.html,st+1; } //按序号取元素 bool getElement(seqList S,int i,elementType &x) { if(i<1 || i>https://www.360docs.net/doc/011313184.html,st+1) //i为元素编号,有效范围在https://www.360docs.net/doc/011313184.html,st+1之间 return false; else { x=S.data[i-1]; return true; } } //查找元素x,成功:返回元素编号;失败:返回0 int listLocate(seqList S,elementType x) { int i; for(i=0;i<=https://www.360docs.net/doc/011313184.html,st;i++) { if(S.data[i]==x) return i+1; //找到,转换为元素编号输出 } return 0; } //插入元素 int listInsert(seqList &S,elementType x, int i) 非线性控制理论和方法 姓名:引言 人类认识客观世界和改造世界的历史进程,总是由低级到高级,由简单到复杂,由表及里的纵深发展过程。在控制领域方面也是一样,最先研究的控制系统都是线性的。例如,瓦特蒸汽机调节器、液面高度的调节等。这是由于受到人类对自然现象认识的客观水平和解决实际问题的能力的限制,因为对线性系统的物理描述和数学求解是比较容易实现的事情,而且已经形成了一套完善的线性理论和分析研究方法。但是,现实生活中,大多数的系统都是非线性的。非线性特性千差万别,目前还没一套可行的通用方法,而且每种方法只能针对某一类问题有效,不能普遍适用。所以,可以这么说,我们对非线性控制系统的认识和处理,基本上还是处于初级阶段。另外,从我们对控制系统的精度要求来看,用线性系统理论来处理目前绝大多数工程技术问题,在一定范围内都可以得到满意的结果。因此,一个真实系统的非线性因素常常被我们所忽略了,或者被用各种线性关系所代替了。这就是线性系统理论发展迅速并趋于完善,而非线性系统理论长期得不到重视和发展的主要原因。控制理论的发展目前面临着一系列严重的挑战, 其中最明显的挑战来自大范围运动的非线性复杂系统, 同时, 现代非线性科学所揭示的分叉、混沌、奇异吸引子等, 无法用线性系统理论来解释, 呼唤着非线性控制理论和应用的突破。 1.传统的非线性研究方法及其局限性 传统的非线性研究是以死区、饱和、间隙、摩擦和继电特性等基本的、特殊的非线性因素为研究对象的, 主要方法是相平面法和描述函数法。相平面法是Poincare于1885年首先提出的一种求解常微分方程的图解方法。通过在相平面上绘制相轨迹, 可以求出微分方程在任何初始条件下的解。它是时域分析法在相空间的推广应用, 但仅适用于一、二阶系统。描述函数法是 P. J.Daniel于1940 第一章 行列式 习题1.1 1. 证明:(1)首先证明)3(Q 是数域。 因为)3(Q Q ?,所以)3(Q 中至少含有两个复数。 任给两个复数)3(3,32211Q b a b a ∈++,我们有 3 )()3()3)(3(3)()()3()3(3)()()3()3(2121212122112121221121212211b a a b b b a a b a b a b b a a b a b a b b a a b a b a +++=++-+-=+-++++=+++。 因为Q 是数域,所以有理数的和、差、积仍然为有理数,所以 ) 3(3)()3()3)(3()3(3)()()3()3()3(3)()()3()3(2121212122112121221121212211Q b a a b b b a a b a b a Q b b a a b a b a Q b b a a b a b a ∈+++=++∈-+-=+-+∈+++=+++。 如果0322≠+b a ,则必有22,b a 不同时为零,从而0322≠-b a 。 又因为有理数的和、差、积、商仍为有理数,所以 )3(33) (3)3() 3)(3()3)(3(3 32 2 22212122222121222222112211Q b a b a a b b a b b a a b a b a b a b a b a b a ∈--+--= -+-+= ++。 综上所述,我们有)3(Q 是数域。 (2)类似可证明)(p Q 是数域,这儿p 是一个素数。 (3)下面证明:若q p ,为互异素数,则)()(q Q p Q ?。 (反证法)如果)()(q Q p Q ?,则q b a p Q b a +=? ∈?,,从而有 q ab qb a p p 2)()(222++==。 由于上式左端是有理数,而q 是无理数,所以必有02=q ab 。 所以有0=a 或0=b 。 如果0=a ,则2 qb p =,这与q p ,是互异素数矛盾。 如果0=b ,则有 a p =,从而有“有理数=无理数”成立,此为矛盾。 所以假设不成立,从而有)()(q Q p Q ?。 (A )需经常修改L 中的结点值 (E )需不断对L 进行删除插入 第二部分线性表 、选择题 1 ?关于顺序存储的叙述中,哪一条是不正确的 (B ) A. 存储密度大 B. 逻辑上相邻的结点物理上不必邻接 C. 可以通过计算直接确定第 i 个结点的位置 D. 插入、删除操作不方便 2.长度为n 的单链表连接在长度为 m 的单链表后的算法的时间复杂度为 (C ) A 0( n ) B 0(1) C 0(m ) D 0(m+n ) 3 .在n 个结点的顺序表中,算法的时间复杂度是 0(1)的操作是:(A ) A 访问第i 个结点(1<=i<=n )和求第i 个结点的直接前趋(2<=i<=n ) B 在第i 个结点(1<=i<=n )后插入一个新结点 C 删除第i 个结点(1<=i<=n ) D 将n 个结点从小到大排序 4.一个向量第一个兀素的存储地址是 100 ,每个兀素的长度为 2 ,则第5 个兀素的地址是 (B ) ( A ) 110 ( B ) 108 (C ) 100 ( D ) 120 5 .已知一个顺序存储的线性表, 设每个结点需要占 m 个存储单元,若第一个结点的地址为 da , 则第i 个结点的地址为:(A ) 7 .链表是一种采用( B )存储结构存储的线性表。 (A )顺序 (B )链式 (C )星式 (D )网状 8 .线性表若采用链式存储结构时,要求内存中可用存储单兀的地址: (D ) (A )必须是连续的 (B )部分地址必须是连续的 (C )一定是不连续的 (D )连续或不连续都可以 9 .线性表L 在_ ( B )情况下适用于使用链式结构实现。 A ) da+(i-1)*m B ) da+i*m 6.在具有n 个结点的单链表中,实现( A )遍历链表和求链表的第 i 个结点 C )删除开始结点 C ) da-i*m D ) da+(i+1)*m A )的操作,其算法的时间复杂度为 0(n )。 B )在地址为p 的结点之后插入一个结点 D ) 删除地址为p 的结点的后继结点 第二章线性表习题及答案 一、基础知识题 2.1 试描述头指针、头结点、开始结点的区别、并说明头指针和头结点的作用。 答:始结点是指链表中的第一个结点,也就是没有直接前趋的那个结点。 链表的头指针是一指向链表开始结点的指针(没有头结点时),单链表由头指针唯一确定,因此单链表可以用头指针的名字来命名。 头结点是我们人为地在链表的开始结点之前附加的一个结点。有了头结点之后,头指针指向头结点,不论链表否为空,头指针总是非空。而且头指针的设置使得对链表的第一个位置上的操作与在表其他位置上的操作一致(都是在某一结点之后)。 2.2 何时选用顺序表、何时选用链表作为线性表的存储结构为宜? 答:在实际应用中,应根据具体问题的要求和性质来选择顺序表或链表作为线性表的存储结构,通常有以下几方面的考虑: 1.基于空间的考虑。当要求存储的线性表长度变化不大,易于事先确定其大小时,为了节约存储空间,宜采用顺序表;反之,当线性表长度变化大,难以估计其存储规模时,采用动态链表作为存储结构为好。 2.基于时间的考虑。若线性表的操作主要是进行查找,很少做插入和删除操作时,采用顺序表做存储结构为宜;反之,若需要对线性表进行频繁地插入或删除等的操作时,宜采用链表做存储结构。并且,若链表的插入和删除主要发生在表的首尾两端,则采用尾指针表示的单循环链表为宜。 2.3 在顺序表中插入和删除一个结点需平均移动多少个结点?具体的移动次数取决于哪两个因素? 答:在等概率情况下,顺序表中插入一个结点需平均移动n/2个结点。删除一个结点需平均移动(n-1)/2个结点。具体的移动次数取决于顺序表的长度n以及需插入或删除的位置i。i 越接近n则所需移动的结点数越少。 2.4 为什么在单循环链表中设置尾指针比设置头指针更好? 答:尾指针是指向终端结点的指针,用它来表示单循环链表可以使得查找链表的开始结点和终端结点都很方便,设一带头结点的单循环链表,其尾指针为rear,则开始结点和终端结点的位置分别是rear->next->next 和rear, 查找时间都是O(1)。 若用头指针来表示该链表,则查找终端结点的时间为O(n)。 2.5 在单链表、双链表和单循环链表中,若仅知道指针p指向某结点,不知道头指针,能否将结点*p从相应的链表中删去?若可以,其时间复杂度各为多少? 答:我们分别讨论三种链表的情况。 1. 单链表。当我们知道指针p指向某结点时,能够根据该指针找到其直接后继,但是由于不知道其头指针,所以无法访问到p指针指向的结点的直接前趋。因此无法删去该结点。 2. 双链表。由于这样的链表提供双向链接,因此根据已知结点可以查找到其直接前趋和直接后继,从而可以删除该结点。其时间复杂度为O(1)。 3. 单循环链表。根据已知结点位置,我们可以直接得到其后相邻的结点位置(直接后继),又因为是循环链表,所以我们可以通过查找,得到p结点的直接前趋。因此可以删去p所指结点。其时间复杂度应为O(n)。 2.6 下述算法的功能是什么? LinkList Demo(LinkList L){ // L 是无头结点单链表 ListNode *Q,*P; if(L&&L->next){ Q=L;L=L->next;P=L; 第二章 矩阵及其运算 1 已知线性变换 ?????++=++=++=3 21332123 2113235322y y y x y y y x y y y x , 求从变量x 1 x 2 x 3到变量y 1 y 2 y 3的线性变换 解 由已知 ? ??? ?????? ? ?=???? ??22 1321323513122y y y x x x 故 ???? ?????? ? ?=???? ??-3211 221323513122x x x y y y ? ??? ?????? ??----=321423736 947y y y ?????-+=-+=+--=3 21332123 211423736947x x x y x x x y x x x y 2 已知两个线性变换 ?????++=++-=+=3 2133 2123 11542322y y y x y y y x y y x ?????+-=+=+-=3 233122 11323z z y z z y z z y 求从z 1 z 2 z 3到x 1 x 2 x 3的线性变换 解 由已知 ???? ?????? ? ?-=???? ??221321514232102y y y x x x ??? ? ?????? ??--???? ??-=32131 010 2013514232102z z z ??? ? ?????? ??----=32 1161109412316z z z 所以有?????+--=+-=++-=3 2133 2123 2111610941236z z z x z z z x z z z x 3 设???? ??--=111111111A ??? ? ??--=150421321B 求3AB 2A 及A T B 解 ??? ? ??---???? ??--???? ??--=-1111111112150421321111111111323A AB ???? ??----=???? ??---???? ??-=2294201722213211111111120926508503 ??? ? ??-=???? ??--???? ??--=092650850150421321111111111B A T 4 计算下列乘积 (1)??? ? ?????? ??-127075321134 解 ???? ?????? ??-127075321134???? ???+?+??+?-+??+?+?=102775132)2(71112374?? ? ? ??=49635 (2)???? ??123)321( 解 ??? ? ??123)321((132231)(10) 习 题 2-1 1.由6名选手参加乒乓球比赛,成绩如下:选手1胜选手2、4、5、6而负于选手3;选手2胜选手4、5、6而负于选手1、3;选手3胜选手1、2、4而负于选手5、6;选手4胜选手5、6而负于选手1、2、3;选手5胜选手3、6而负于选手1、2、4;选手6胜选手2而负于选手1、3、4、5.若胜一场得1分,负一场得0分,使用矩阵表示输赢状况,并排序. 解: ????? ?? ? ? ? ??000010 100100110000001011 1110001110106543216 54321,选手按胜多负少排序为:6,5,4,3,2,1. 2.设矩阵???? ??-=???? ?? +-=2521 ,03231 z x y x B A ,已知B A =,求z y x ,,. 解:由于B A =得?????=-=+=-0253223z x y x ,解得:?? ? ??===211 z y x 。 习 题 2-2 1.设???? ??=0112A ,??? ? ??-=4021B ,求 (1)B A 52-; (2)BA AB -; (3)2 2B A -. 解:(1)??? ? ??--=???? ??--???? ??=???? ??--???? ??=-202892001050224402150112252B A ; (2)???? ??--=???? ??--???? ??--=???? ?????? ??--???? ??-???? ??=-2592041021820112402140210112BA AB ; (3)??? ? ??--=???? ??-???? ??=???? ??-???? ??--???? ?????? ??=-152441606112254021402101120112B A 22. 2.已知????? ??--=230412301321A ,??? ? ? ??---=052110 35123 4B ,求B A 23-. 解:??? ? ? ??----????? ??--=052110351234223041230 13 21 323B -A ??? ? ? ??----=????? ??----????? ??--=61941016151055011010422061024686901236903963 3.设??? ? ? ??----=????? ??=101012121234,432112 122121B A ,求 第二章线性表 一、填空题 1、数据逻辑结构包括线性结构、树型结构、图型结构这三种类型,树形结构和图形结构合称为非线性结构。 2、在线性结构中,第一个结点没有前驱结点,其余每个结点有且只有个前驱结点,最后一个结点没有后续结点,其余每个结点有且只有一个后续结点。 3、在顺序表中插入或删除一个元素,需要平均移动一半元素,具体移动的元素个数与插入或删除的位置有关。 4、在顺序表中,逻辑上相邻的元素,其物理位置一定相邻。在单链表中,逻辑上相邻的元素,其物理位置不一定相邻。 5、在带头结点的非空单链表中,头结点的存储位置由头指针指示,首元素结点的存储位置由头结点的next域指示,除首元素结点外,其它任一元素结点的存储位置由其直接前趋结点的next域指示。 6、阅读下列算法,并补充所缺内容。 void purge_linkst( ListNode *& la ) { // 从头指针为 la 的有序链表中删除所有值相同的多余元素,并释放被删结点空间ListNode *p,*q; if(la==NULL) return; q=la; p = la->link; while (p) { if (p && ___(1)p->data!=q->data___) {q=p; p = p->link;} else { q->link= ___(2)p->link___; delete(p); p=___(3)q->link___; } }//while }// purge_linkst 二、选择题 1、在数据结构中,从逻辑上可以把数据结构分成 C。 A、动态结构和静态结构 B、紧凑结构和非紧凑结构 C、线性结构和非线性结构 D、内部结构和外部结构 2、线性表的逻辑顺序与存储顺序总是一致的,这种说法 B。 A、正确 B、不正确 3、线性表若采用链式存储结构时,要求内存中可用存储单元的地址D。 A、必须是连续的 B、部分地址必须是连续的 C、一定是不连续的 D、连续或不连续都可以 4、在以下的述叙中,正确的是B。 A、线性表的线性存储结构优于链表存储结构 B、二维数组是其数据元素为线性表的线性表 C、栈的操作是先进先出 D、队列的操作方式是先进后出 三、综合题 1、已知L是无表头结点的单链表,且P结点既不是首元结点,也不是尾元结点,试从下列提供的答案中选择合适的语句序列。 A、在P结点后插入S结点的语句序列是((4)、(1)); B、在P结点前插入S结点的语句序列是((7)、(11)、(8)、(4)、(1)); C、在表首插入S结点的语句序列是((5)、(12)); 线性系统理论课程大作业论文线性系统理论综述及其应用 这学期学习的线性系统理论属于系统控制理论的一个最为基本和成熟发展的分支,主要包括以下内容:介绍采用系统理论解决工程问题的一般步骤,明确建模、分析、综合在解决实际问题中的作用,并重点介绍线性系统模型的特征和分析方法;介绍系统的状态空间描述,结余状态空间方法的分析和系统结构特征和结构的规范分解以及状态反馈及其性质等。 一.线性系统理论研究内容综述 系统是系统控制理论所要研究的对象,从系统控制理论的角度,通常将系统定义为由相互关联和相互制约的若干部分组成的具有特定功能的整体。 动态系统是运动规律按照确定规律或者确定的统计的规律岁时间演化的一类系统,动态系统的行为由各类变量间的关系来表征,系统的变量可以分为三种形式,一类是反映外部对系统的影响或者作用的输入变量组,如控制、投入、扰动等;二是表征系统状态行为的内部状态变量组;三是反映系统外部作用或影响的输入变量组如响应,产出。表征系统动态的过程的数学描述具有两类基本形式,一是系统的内部描述,另一组是输入变量对状态变量的组的动态影响。从机制的角度来看,动态系统可被分类为连续系统变量动态系统和离散事件动态系统;从特征的角度,动态系统可分别分类为线性系统和非线性系统,参数集成系统和分布参数系统;从作用时间类型角度,动态系统可被称为连续时间系统和离散时间系统。 线性系统理论是系统控制理论最为成熟和最为基础的分支。他是现代控制理论的一个重要组成部分,也是对经典控制理论的延申。现代控制理论主要是着重研究现性状态的运动规律和改变这种规律的可能性和方法。线性系统的理论和方法是建立在建模的基础上。在建模的基础上,可以进一步把线性系统的理论进一步区分为“分析理论”和“综合理论”。分析理论分为定量分析和定性分析,定量分析是着重于研究对系统性能和控制具有重要意义的结构特性。系统综合理论是建立在分析的基础上,系统综合目的是使系统的性能达到期望的指标或实现最优化。 线性系统理论的研究对象为线性系统,线性系统为最为简单和最为基本的一类动态系统。线性系统理论是系统控制理论中最为充分、发展最为成熟和应用最为广泛的一个开支。线性系统的的一个基本特征是其模型满足线性叠加原理。对于线性系统的研究也可以进一步分为线性是不变系统和线性时不变系统两类。对系统进行建模也是控制理论中具有重要的作用。对系统建模的作用多样性和基本型、途径以及系统的建模的准则=====系统建模的简单性和分析的结果的准确性之间做出适当的折中。 线性控制理论在1960年前后开始了从经典控制理论到现代理论的过渡。反应这种过渡的重要标志成果是,卡尔曼把在分析力学中广为采用的状态空间描 一、选择题 1. D 2. B 3. B 4. B 5. B 6. B 7. D 8. B 9. C 10. B 11. C 12. C 13. B 14. D 15. A 16. B 17. B 18. C 19. A 20. C 21. D 22. A 23. A 24. A 二、填空题 1. 首元素其直接前驱结点的链域的值 2. HL→next =NULL; HL=HL→next 3. 有限、一对一 4. O(1) 随机存取 5. 表中一半表长和该元素在表中的位置 6. 必定不一定 7. O(1) O(n) 8. 前驱结点的地址 O(n) 9. n-i+1 n-i 10. s->left=p p->right 三、判断题 1. × 2. × 3. × 4. × 5. × 6. × 7. √ 8. × 9. × 10. × 11. × 四、简答题 1. 线性表为:(78,50,40,60,34,90) 2. (36, 12, 8, 50, 25, 5, 15) 3. 解答: 尾指针是指向终端结点的指针,用它来表示单循环链表可以使得查找链表的开始结点和终端结点都很方便,设一带头结点的单循环链表,其尾指针为rear,则开始结点和终端结点的位置分别是rear->next->next和rear, 查找时间都是O(1)。 若用头指针来表示该链表,则查找终端结点的时间为O(n)。 五、编程题 1. 解答:由于在单链表中只给出一个头指针,所以只能用遍历的方法来数单链表中的结点个数了。算法如下: int ListLength ( LinkList L ) { int len=0 ; ListNode *p; p=L; //设该表有头结点 while ( p->next ) { p=p->next; len++; } return len; } 2. int searchmin(linklist l) { int min; int *p; p=l; min=p->data; p=p->next; while (p->next< >nil) { if (min>p->data) min=p->data; p=p->next; } return min; } 3. int searchmax(linklist l) { int max; int *p; p=l; max=p->data; p=p->next; while (p->next< >nil) { if (max 数据结构与算法上机作业第二章线性表 一、选择题 1、若长度为n的线性表采用顺序存储结构,在其第i个位置插入一个新的元素算法的时间复杂度为 C 。 A. O(log2n) B. O(1) C. O(n) D. O(n2) 2、以下关于线性表的说法中,不正确的是 C 。 A. 线性表中的数据元素可以是数字、字符、结构等不同类型 B. 线性表中包含的数据元素个数不是任意的 C. 线性表中的每一个结点都有且只有一个直接前驱和直接后继 D. 存在这样的线性表:表中各结点都没有直接前驱和直接后继 3、在有n个结点的顺序表上做插入、删除结点运算的时间复杂度为 B 。 A. O(1) B. O(n) C. O(n2) D. O(log2n) 4、等概率情况下,在有n个结点的顺序表上做插入结点操作,需平均移动的结点数目为 C 。提示:插入的位置有n+1个,移动总数为:1+2+3+……+n A. n B. (n-1)/2 C. n/2 D. (n+1)/2 5、在一个长度为n的顺序存储的线性表中查找值为x的元素时,平均查找长度(及x同元素的平均比较次数,假定查找每个元素的概率都相等)为 C 。 A. n B. n/2 C. (n+1)/2 D. (n-1)/2 6、在顺序表中,只要知道 D ,就可以求出任一结点的存储地址。 A. 基地址 B. 结点大小 C. 向量大小 D. 基地址和结点大小 7、将两个各有n个元素的有序表归并为一个有序表,其最少的比较次数是 A 。 A. n B. 2n-1 C. 2n D. n-1 8、线性表采用链表存储时其存储地址要求 D 。 A. 必须是连续的 B. 部分地址必须是连续的 C. 必须是不连续的 D. 连续的和不连续的都可以 9、下面关于线性表的描述中,错误的是 B 。 A. 线性表采用顺序存储,必须占用一片连续的存储单元 B. 线性表采用顺序存储,便于进行插入和删除操作 C. 线性表采用链式存储,不必占用一片连续的存储单元 D. 线性表采用链式存储,便于插入和删除操作 10、向具有n个结点的有序单链表中插入一个新结点并仍然有序的时间复杂度是 B A. O(1) B. O(n) C. O(n2) D. O(log2n) 11、在一个带头结点的单链表HL中,若要向表头插入一个由指针p指向的结点,则执行的语句是 D 。 A. HL=p; p->next=HL; B. p->next=HL; HL=p; C. p->next=HL; p=HL; D. p->next=HL->next; HL->next=p; 12、在一个单链表HL中,若要删除由指针q所指向结点的后继结点,则执行的语句是C 。 A. p=q->next; p->next=q->next; B. p=q->next; q->next=p; C. p=q->next; q->next=p->next; D. q->next=q->next->next; q->next=q; 13、设有编号为1, 2, 3, 4的4辆列车,顺序进入一个栈结构的站台,下列不可能的出栈顺序为 D 。 A. 1234 B. 1243 C. 1324 D. 1423 线性代数练习题 第二章 矩 阵 系 专业 班 姓名 学号 第一节 矩阵及其运算 一.选择题 1.有矩阵23?A ,32?B ,33?C ,下列运算正确的是 [ B ] (A )AC (B )ABC (C )AB -BC (D )AC +BC 2.设)2 1 ,0,0,21( =C ,C C E A T -=,C C E B T 2+=,则=AB [ B ] (A )C C E T + (B )E (C )E - (D )0 3.设A 为任意n 阶矩阵,下列为反对称矩阵的是 [ B ] (A )T A A + (B )T A A - (C )T AA (D )A A T 二、填空题: 1.? ?? ? ??---=???? ??--+???? ??-1212561432102824461 2.设????? ??=432112122121A ,????? ??----=101012121234B ,则=+B A 32??? ?? ??--56125252781314 3.=????? ??????? ??-127075321134???? ? ??49635 4.=????? ? ? ??---???? ??-20413121013 143110412???? ? ?---6520876 三、计算题: 设???? ? ? ?--=11 1111 111 A ,4 ??? ? ? ??--=150421321B ,求A AB 23-及B A T ;2294201722213 2222222222092650850311111111 1215042 132111111111 1323???? ? ??----=???? ? ? ?---????? ??-=?? ??? ??---????? ? ?--????? ??--=-A AB .09265085015042132111111111 1???? ? ??-=????? ??--????? ??--===AB B A A A A T T ,则对称,由 线性代数练习题 第二章 矩 阵 系 专业 班 姓名 学号 第二节 逆 矩 阵 一.选择题 1.设* A 是n 阶矩阵A 的伴随矩阵,则 [ B ] (A )1 -* =A A A (B )1 -* =n A A (C )* * =A A n λλ)( (D )0)(=* *A 2.设A ,B 都是n 阶可逆矩阵,则 [ C ] (A )A +B 是n 阶可逆矩阵 (B )A +B 是n 阶不可逆矩阵 (C )AB 是n 阶可逆矩阵 (D )|A +B | = |A |+|B | 3.设A 是n 阶方阵,λ为实数,下列各式成立的是 [ C ] (A ) A A λλ= ( B )A A λλ= ( C )A A n λλ= ( D )A A n λλ= 4.设A ,B ,C 是n 阶矩阵,且ABC = E ,则必有 [ B ] (A )CBA = E (B )BCA = E (C )BAC = E (D )ACB = E 5.设n 阶矩阵A ,B ,C ,满足ABAC = E ,则 [ A ]自动控制原理 题库 第四章 线性系统根轨迹 习题
线性代数第二章答案
第二章线性表答案
线性系统理论
线性代数第二章矩阵试题及答案
第2章线性表习题解答
非线性控制理论和方法
线性代数课后习题答案(陈维新)
(完整版)数据结构第二章线性表1答案
第二章线性表习题及答案
线性代数第二章答案
线性代数第二章习题答案
第二章_线性表(参考答案)
线性系统理论综述
第2章线性表习题参考答案
线性表 答案
线性代数第二章矩阵(答案解析)