第3章第2节平板玻璃平行差测量
§3-2平板玻璃平行差测量
光学系统分两大类
(1)共轴球面系统coaxial spherical system
A、球面
B、非球面
(2)平面镜棱镜系统plane mirror—prism system
平面反射镜、平行玻璃板、光楔、棱镜:反射棱镜、折射棱镜
§3-2-1平行玻璃板平行差测量(光楔的楔角测量)measurement of different of plane parallel
平行玻璃板主要做:保护玻璃滤光片、分划板等
平行差θ主要由色散给定,有时也考虑光轴偏(如航测相机的保护玻璃和滤光片)
δˊC F=(n F-n C) θ
δˊ=(n-1) θ
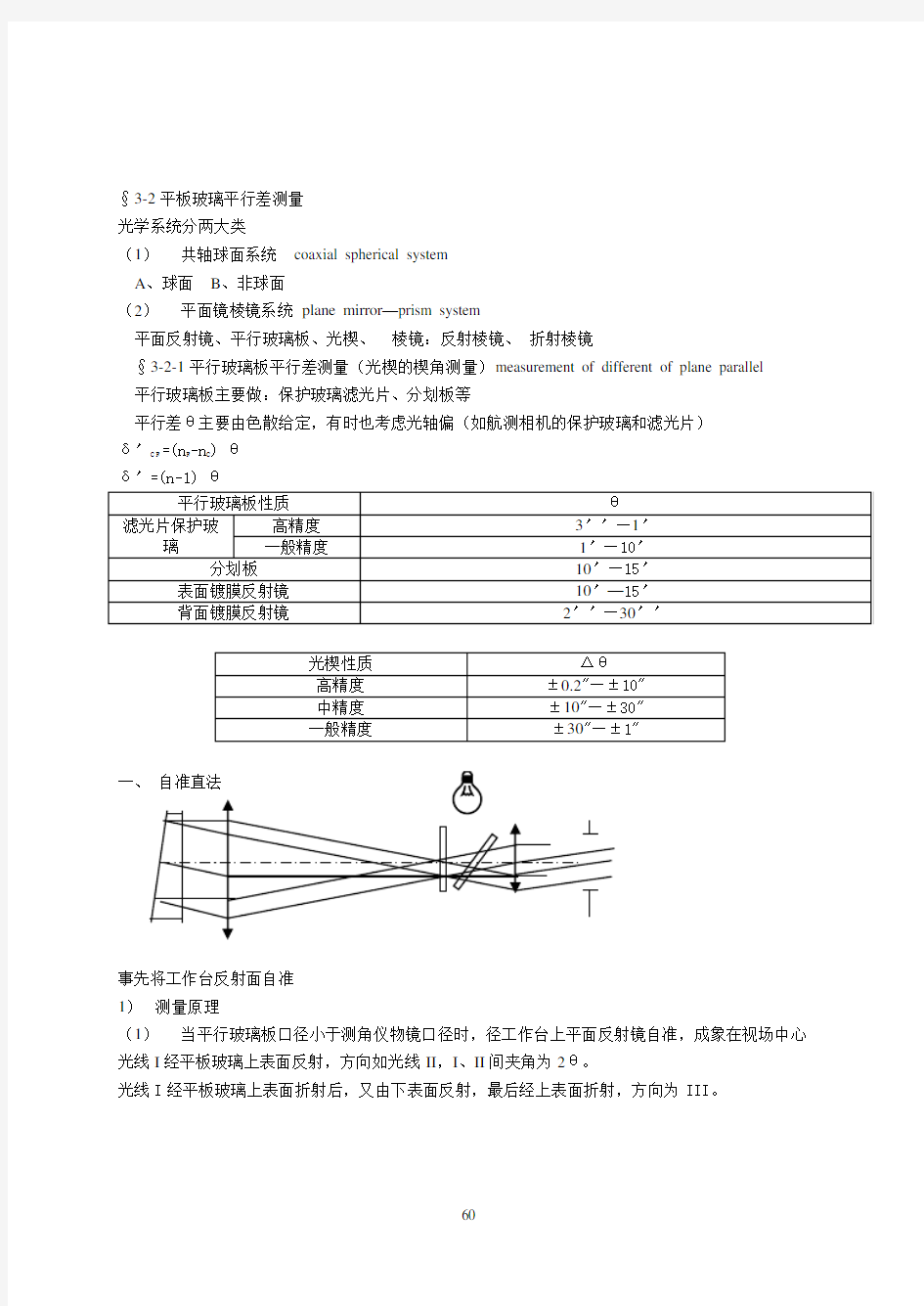
事先将工作台反射面自准
1)测量原理
(1)当平行玻璃板口径小于测角仪物镜口径时,径工作台上平面反射镜自准,成象在视场中心光线I经平板玻璃上表面反射,方向如光线II,I、II间夹角为2θ。
光线I经平板玻璃上表面折射后,又由下表面反射,最后经上表面折射,方向为III。
I
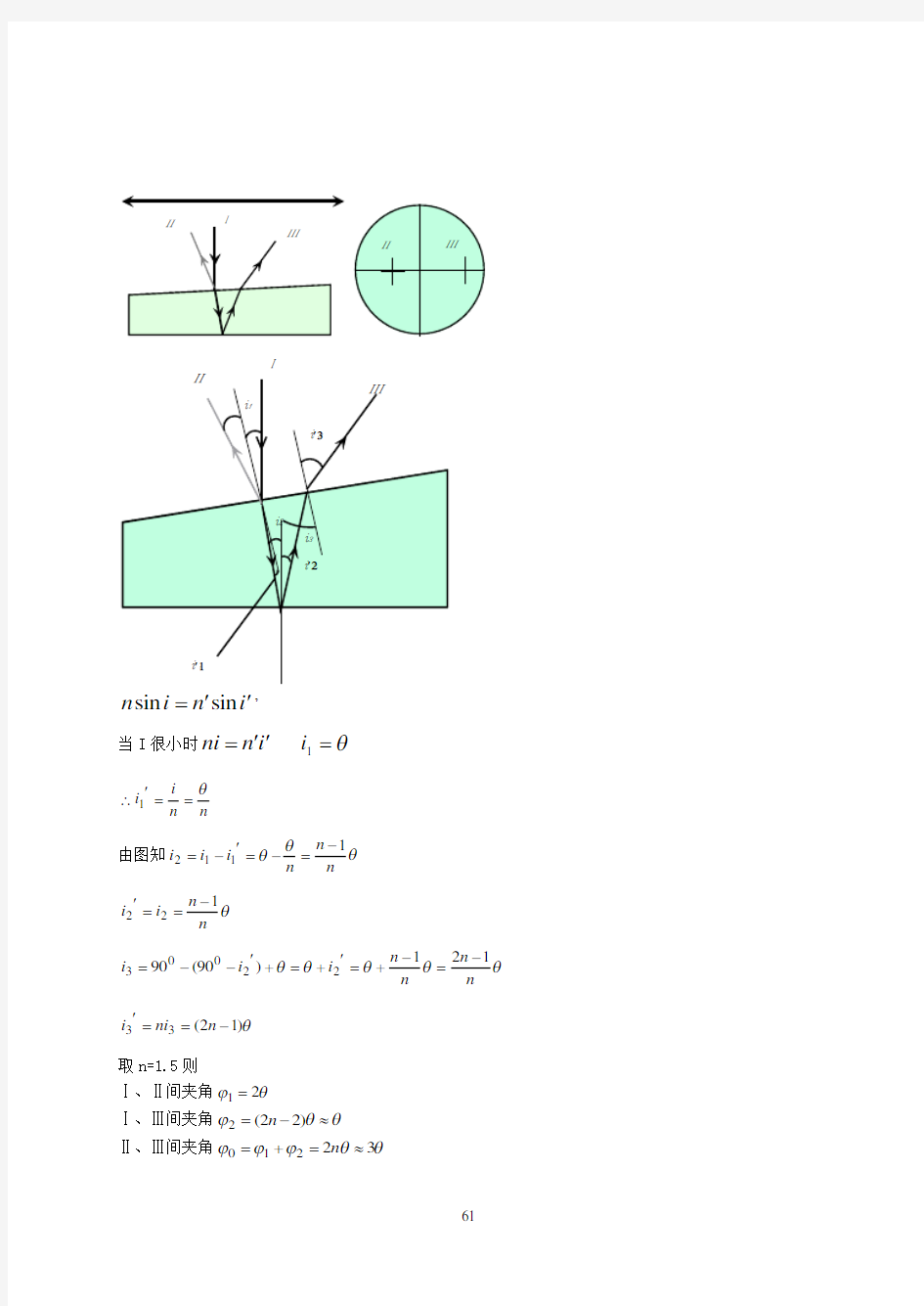
i n i n ''=sin sin ’
当I 很小时i n ni ''= θ=1i
n
n i i θ
=='∴1
由图知θθθn
n n i i i 1
112-=
-='-= θn
n i i 1
22-=
=' θθθθθn
n n n i i i 1
21)90(9022003-=-+='+=+'--= θ)12(33-=='n ni i
取n=1.5则
Ⅰ、Ⅱ间夹角θ?21=
Ⅰ、Ⅲ间夹角θθ?≈-=)22(2n Ⅱ、Ⅲ间夹角θθ???32210≈=+=n
n
2?
θ=
讨论当第一面垂直于光轴时
011='=i i θ='=2
2i i θθ22
3=+'=i i θn ni i 233
==' n
2?
θ=
2) 被测件口径大于测角仪望远镜口径,只能看到II 、III 象。 2、测量装置和测量方法 1) 装置
比较测角仪:自准直望远镜加测量机构
实际分划板每小格对应物方视场角为30″、 读数时取15″,故计算θ时
n
?
θ=
2) 测量方法
(1) 使承物台上平面反射镜垂直于测角仪光轴(自准) (2) 放上被测件,测出? 角,求θ,n
?
θ=
(3) 判断楔角方向
在待测检后表面哈气变模糊的象为后表面的反射像,该象所在的那端为厚端 3) 误差分析
(1) 测平行玻璃板平行差精度(以测量最小平行差θmin 表示)
受人眼鉴别角和仪器鉴别率限制 一般取α=1'',Γ
=
n 2min α
θ(Γ==/,2/min α??θn )
仪器鉴别率应与人眼鉴别角相匹配
???
???=
=Γ==='=Γ??????Γ''=Γ=''Γ
'
'=Γ=''nD D nD D d D D D D D αθαθαα15.1,3.2,20601406012min min A D D L > B D D L <
??????==nD nD αθαθ15.1min min ???
????=
=L L nD nD αθαθ15.1min min 06,50,5.1''===αL D D n 或 ???
???''=??=''=?=9.0505.160
15.18.050
5.160min min θθ (2) 测光楔精度
与自准直平行光管对准精度有关,如采自准直测微平行光管(最小格直为0.1"和0.2")
f n e '
=
2θ f n e '--=lg lg lg lg θ
f f d n dn e de d ''--=
θ
θ
f f n n e e '
'?+?+?=?θθ 22222f n f e f n n
e f n e ''?+
'?+'?=
?θ 22
222)2()2()2(f n e f n e f n f n e '+'+'±='σσσσθ 例:设
%
1.0/,103,00
2.0,2,5.1,550,50,605±=''??±=?±=?==='==-f f n e mm e n mm f mm D mm D L
5.0(104.2%)
1.05505.122
5505.121032.05505.12002.0(22262522''=?±=???+????+??±=''?+'?+'?=?--弧度)f n f e f n n e f n e θ (注:e ?由两项构成 A 分划板刻度误差001.01±=?e
B 对准误差:设01,25''=='δmm f m
则 mm f l m 001.010*******±=???='=?-δ)
二、 干涉法 The interference-method 1、 干涉的概念 1) 相干光
(1) 频率相同 (2)位相差恒定 (3)光矢量振动方向相同(4)光程差小于波列长度λ
λ?=≤?2
2L
因此,必须用单色光源,使同一光源发出的光束分成两束,且光程差不能太大。钠光
mm )200~100(≤?,激光~10(≤?几十米) 2) 平板干涉
i i htg i nh sin 2cos /2'-'=?,i n i i n i n '=?'=sin sin sin sin 0
i nh i i nh i i n i h i nh '='-?'='''-'=?∴cos 2)sin 1(cos /2cos /sin sin 2cos /22
又i n n
n i i 22
22sin 1/sin 1cos -=
-=' ),,(sin 222i n h f i n h =-=?∴
考虑半波损失
???
????
+=--==--=暗)(亮λλδλλδ212sin 22sin 22222m i n h m i n h ??
??
?=-=?+=
-=?暗亮)(λλm i n h m i n h 222
2sin 221sin 2 i 不变h 变等厚干涉,I 变h 不变等倾干涉 2、 等厚干涉法 1)菲索干涉仪
h
原理
当i=0时 0sin =i
??
???
==?+==?暗亮
)(λλm nh m nh 22
12 λ)()(21212m m h h n -=-暗 λn
m m h h h 2)(1
212-=
-=? 令m=m2-m1 n
m h 2λ
=
? nb
m nb m nb m b h λλλθ133.103100022062652=?==?=
误差分析
2
2
2
??
? ??+??? ??+??? ??=n b m n b m σσσθσθ
m σ0.2如用测微目镜测条纹还可更小b σ0.05~0.1mm 若m 1≤
能测最小角度nb
λ
θ133
.103min =
例:55.0,1,5.1,200====λm n b 2.0200
5.155
.0133
.103min ''≈?=θ比值准直方法好
可见min θ取决于零件尺寸即受b 的限制不受人眼鉴别率限制m<1(即λ
最大可测角mm m b 5.0/max min ≥=α,b m 2max ≤,n /265.206max λθ= 厚度按判定:使局部加热条纹弯曲凸向薄端 测平面面形
光程差变化λ,2/λ=?h 看条纹的弯曲和不规则判断面形误差,减小空气层厚度看条纹移动
判断凸凹性质。
精度分析:
1、 标准平面的误差1σ
口径大于200mm 时加工和检验困难,精度大于二十分之一波长用液面作基准面地球半径6400KM 液面口径500mm 时液面平面度误差为百分之一波长mm h 16
1089.4-?=?
2、 准直物镜的像差2σ
出射光不是平行光以角象差θ表示形成干涉条纹的光程差附加了一个h 2θ的光程差,若精度要求100/λ,mm h 50=求得1' θ设计这样的物镜不难。 (322.150000
2'
θλ
θ)
3、 条纹的判读引起的误差3σ
20/λ
或30/λ
总的测量标准偏差2
3
2221σσσσ++= 测量曲率半径
测出b 范围内干涉条纹数m ,λ
m b R 42≈,2λm h =
h
b R 82
=
若mm b mm mm b m 100,106.0,1/31=?==--λ得最小半径为41m ,以
1=m 代入得最大可测半径4167m
误差分析 2
224??
?
??+??? ??+??? ??=λσσσσλm b R m b R
主要取决于m σ约为1%~10% 菲索球面干涉仪
2)泰曼干涉仪 原理
4——标准镜组与待检面
光束经平板偏转θ)1(-n 由反射镜反射又经过平板偏转θ)1(2-n 则206265)1(2b
n m -=
λ
θ
误差分析
2
2
2
1??
?
??-+??? ??+??? ??=n b m n b m σσσθσθ
厚端判断:调节参考反射镜向缩短光程方向移动条纹移动的方向是薄端
m λ
2
当b
n )1(2-≤
λθ时看不到干涉条纹
调节反射镜旋转θ)1(-n 则在被测平板区域看不到干涉条纹而在其外部有干涉条纹代入公式可得
206265)1(2D
n m -=
λ
θ D 反射镜口径
检验面形偏差
将被测工件代替7根据干涉条纹可判断面形误差]
例:用氦氖激光器作光源在泰曼干涉仪上检验直径D=100mm,
D 5.0=σ折射率n=1.5147,0005.0±=n σ及计数误差为m=16,2.0=m σ 求1)平板玻璃的平性差及测量误差
2)当移动长靠近使参考臂缩短引起条纹向右移动问如图圆圈部分为薄端还是厚段
解: 3.20100
)15147.1(2108.63216206265)1(26
''=?-??=-=-D n m λθ
72.05147.00005.01005.0162.03.2012
2
2
2
2
2
''=?
??
??+??? ??+??? ??±=??? ??-+??? ??+??? ??=n b m n b m σσσθσθ
较薄
3、 等倾干涉法
1) 测量原理
当干涉处尺寸很小则?h 很小可忽略I 变化起主要作用上升为主要矛盾
n h h n 8/,4/2λλ≤?≤?
θp h =?θλλθn p n p 8/8/≤→≤∴
又nb m 2λθ=
m
b
nm nb p 482=≤∴λλ
此为等倾干涉的前提及保证干涉场内有厚度引起的光程差小于四分之一波长(瑞利极限)从而限定了照明区域的宽度如图光阑b 限定了照明区域的宽度以保证上述要求
半透镜
物镜
分划板
镜
转动被测平行玻璃板至某一位置,当平移平行玻璃板时条纹向外扩展(或向里收缩),而沿垂直此方向平移时,条纹无变化。条纹向外扩展,说明由薄变厚,条纹向里收缩,说明由厚变薄 i nh i n h '=-=?cos 2sin 222
中心条纹级数最高(光程差最大),扩展时,中心不断出现新条纹,每出现一个新条纹,说明光程痉变化一个波长,收缩时,中心条纹不断消失,每消失一个条纹,说明光程差也变化一个波长。设出现或消失的中心条纹为m ,则n m h 2/λ=?nb m b h 2//λ?=?= 3) 可测的θmin
如不出现或消失新条纹,只是条纹的半径变化,说明由厚度变化引起的的光程差变化小于一个波长
λ≤?h n 2
i nh i n h '=-=?cos 2sin 222
条纹对应的角度近似为i ,设视场内条纹对应半径为r 则f R i '
= 设h h h ?+=12
但平移平行玻璃板时厚度变化h ?条纹半径21r r →则
'
?+='211
1cos )(2cos 2i h h n i nh 将'1cos i 、'2cos i 展成级数并略去二次以上项得
?
?'-=???+'+'-='
'-=???+'+'-='!21!4!21cos !
21!4!21cos 22
422222
1
41211i i i i i i i i 得h i h i h i ?'-+'-='-)2
1()21()21(2
2122121 122
2
12212222212
122)21()21()21(h i i i h i i i h '-'-
'='-'--'-=? 1222 'i 所以12
122)2
2(h i i h '
-'=? 由折射定律n i i ='/又知f R
i '
=
f n R n i i '=='∴代入得)(2)(2121222222212222R R f n h h f n R f n R h -'
='-'=?
)(2/2
1222
2
R R b
f n h b h -'=
?=θ
测的R2,R1可求得θ
θ 的测量比等厚干涉小,因为等倾干涉只照明零件的一小部分,不受仪器口径限制只要零件尺寸
足够大可测小角度,且厚度差引起的光程差小于一个波长也可以测。
f
4、 激光点光源干涉法 原理
γθ'
=sin sin 1
21SS n S S , n d S S /221=, D SS 21=, γγ?θ'≈'≈sin ,sin n n
n d /2
θθ?γ2211/22sin n d D
n n d D n S S SS ===
', )1(d
nD n n +
='+=θγθγ
θγn d
nD
D D l )1(22+
== 206265)
(2)/1(2?+=+=
nD d nD ld
d nD Dn l θ
条纹中心对应的方向为后端
§3-2-2棱镜光学平行差测量 一、 反射棱镜的一些定义
1、 光轴(optical axis ):the part of optical system ˊs optical axis
光学系统光轴通过反射棱镜的部分pass reflex prism
2、 光轴载面(optical axis section ):the section is decided by optical axis of reflex prism 反射棱镜光轴所决定的平面
1) 入射光轴截面:由棱镜光轴上最初入射的两根折线所决定的平面 2) 出射光轴截面:由棱镜光轴上最后出射的两根折线所决定的平面 3、 光轴长度:反射棱镜光轴的几何 度
The length of optical axis:the geometrical length of optical axis of reflex prism. 4、 光学不平行度(optical parallel difference )
反射棱镜展成平行玻璃板法、这一平板的平行差。对使用时光轴垂直在入射面入射棱镜,也就是光线反射棱镜的入射面垂直入射,光线在出射前对出射面法线的偏角。 1) 第一光学不平行度θI :在入射光轴截面方向的光学不平行度分量。 2) 第二光不平行度θII :在垂直入射光轴截面方向的光学不平行度分量。 5、 棱差(edge difference )
1) A 棱差r A : 某一工作面(除屋脊面)和基准棱的夹角,即工作面法线偏离光轴截面的角度。 2) C 棱差r C :屋脊棱镜屋脊棱偏离光轴截面的角度。 原定义:
A 棱差:具有三个工作面的棱镜,某一指定棱与该棱所对的工作面间夹角。
B 棱差:具有四个工作面的棱镜,其指定的两个棱在通过两个棱的标准位置的平面上相对的编转角。
C 棱差:屋脊棱镜的屋脊棱在通过标准位置并垂直 于屋脊角平分面的平面朵相对于标准位置的偏转角。
基准棱的选定原则:以入射面和出射面交棱为基准棱。对于出入射面平行式重合的棱镜,取入射面和第一个反射面交棱交基准棱 工作面=反射面+折射面(出入射面)
l
6、 光学平行度和几何形状误差关系
1) θI 与光轴截面内角度误差关系,展成平行玻璃板,求其平行差
B C I ?-?=θI θδ=?45
2) 棱差与θII
关系
DI-90
045cos 2A II γθ= DIII J -00c A A II C γγγγθ=-+=0060cos 260cos 2
DII J -450
036722220'=?-?=?+?+?-=?-?-=?-?-?=δθC B B C C A C A C A I
c c II γγθ76.00367cos 20≈'=
二、 反射棱镜光学平行差的测量 在比较测角仪上测量 1、 直角棱镜DI —90°
n a n I I
I =
=
2?θ n
a
n II II II ==2?θ
2、 直角棱镜DII —180°
a
1
a
2
2nθ
IV
a2
a1
1)090>αIV 先消失V 后消失 IV ——III ——II ——V ——I 2)090<αV 先消失IV 后消失
V ——III ——II ——VI ——I
A A II γγθ245cos 20==
n a I 2900=
? n a i I =θ n
a
II II =θ n
a II
A 22=γ
3、 斯未特屋脊棱镜DIII —45°
n a I I =
θ n
a
II II =θ
n a I =
'03670δ n
a II
c 76.0=γ §5-2 光轴截面内角度误差的测量 1、 比较法
用一块标准角度棱镜与被测棱镜角度比角
902?=I
θIV V
a 1 a
2 a
s
a
a =? 2、 自准法 1) 直角棱镜
(1)先测90
n
a I 2901
0=
? (2) 测n
a A C B C I I 2
0245=?+?==?-?=δθ , 2
2/)90(20A
n a C I I ?-=
?-=?θ (3) )(C A B ?+?-=?
下偏为正
2) 斜方棱镜XII —00
??
?
??
?
??+?=?+?=?-?-?===?+?+?+?B A D A C D A n n a D C B A I I 3412)
2(0
θθθ
3、 在精密测角仪上测量 1) 精密测角仪动作组合
IV
A
I1
C
C
A
D
B C
B
C
(1) 工作台和度盘不动,转臂转动 (2) 转臂不动,工作台和度盘转动 (3) 转臂和工作台不动,度盘转动 (4) 工作台、度盘、转臂一起转动 (5) 工作台单独转动 2) 测量前仪器调整 (1) 仪器调水平
(2) 前置镜和平行光管轴垂直转轴(平行前置镜光轴) 3) 测量
使被测角的棱垂直前置镜及平行光管光轴(靠工作台上三个调整螺钉实现) 方法有四:
(1) 工作台、度盘不动、转动转臂
测得?α-=0180
(2) 转臂不动,度盘和工作台一起转动,测得
?α-=0180
(3) 平行光管和前置镜夹一定角度,度盘和工作台一起转动,转臂不动,测得
?α-=0180
(4)平行光管光束由被测角分为两束光,测得 (度盘不动,转动转臂)
2/?α=
四、屋脊棱镜屋脊角误差的测量 1、 屋脊角及双角差的概念
1) 屋脊角误差δ:两屋脊面夹角误差 2) 双角差S 由屋脊触吴左引起一束平
αδcos 4n s = 2、 测量方法 1) 自准法
αδ
cos 4n
a s s ==
α
δcos 4n a s
=
2) 透射法
α
s
α
δ
cos
2n
a s
=
3)干涉法
DS
s
D
s
tg
D
h=
≈
=
?2
2
)
2(
2
λ
m
h=
?
D
m
D
m
s
1000
206265λ
λ
=
=
小
大
测量平差知识大全
?绪论 ?测量平差理论 ?4种基本平差方法 ?讨论点位精度 ?统计假设检验的知识 ?近代平差概论 ?绪论 §1-1观测误差 测量数据(观测数据)是指用一定的仪器、工具、传感器或其他手段获取的反映地球与其它实体的空间分布有关信息的数据,包含信息和干扰(误差)两部分。 一、误差来源 观测值中包含有观测误差,其来源主要有以下三个方面: 1. 测量仪器; 2. 观测者; 3. 外界条件。 二、观测误差分类 1. 偶然误差 定义,例如估读小数; 2. 系统误差 定义,例如用具有某一尺长误差的钢尺量距; 系统误差与偶然误差在观测过程中总是同时产生的。
3. 粗差 定义,例如观测时大数读错。 误差分布与精度指标 §2-1 正态分布 概率论中的正态分布是误差理论与测量平差基础中随机变量的基本分布。 一、一维正态分布 §2-2偶然误差的规律性
2. 直方图 由表2-1、表2-2可以得到直方图2-1和图2-2(注意纵、横坐标各表示什么?),直方图形象地表示了误差分布情况。 3. 误差分布曲线(误差的概率分布曲线) 在一定的观测条件下得到一组独立的误差,对应着一种确定的误差分布。当观测值个数的情况下,频率稳定,误差区间间隔无限缩小,图2-1和图2-2中各长方条顶边所形成的折线将分别变成如图2-3所示的两条光滑的曲线,称为误差分布曲线,随着n增大,以正态分布为其极限。因此,在以后的讨论中,都是以正态分布作为描述偶然误差分布的数学模型。
4. 偶然误差的特性 第三章协方差传播律及权 在测量实际工作中,往往会遇到某些量的大小并不是直接测定的,而是由观测值通过一定的函数关系间接计算出来的,显然,这些量是观测值的函数。例如,在一个三角形中同精度观测了3个内角L1,L2和L3,其闭合差w和各角度的平差值分别 又如图3—1中用侧方交会求交会点的坐标等。 现在提出这样一个问题:观测值函数的精度如何评定?其中误差与观测值的中误差存在怎样的关系?如何从后者得到前者?这是本章所要讨论的重要内容,阐述这种关系的公式称为协方差传播律。 § 3—1 数学期望的传播
测量平差知识点
1、测量学的研究内容:测定和测设。 2、测定:将地面上客观存在的物体通过测量的手段将其测成数据或图形。 3、测设:就是将测量的手段标定在地面上。 4、水准面:静止的水面。 5、大地水准面:水准面与静止的平均海水面相重合的闭合水准面。 6、铅垂线:重力方向线,是测量工作的基准线。 7、地球椭球面是测量工作的基准面。 8、地物:地面上人造或天然固定的物体:地貌:地面高低起伏形态。 9、测量上常用坐标系:天文、大地、高斯平面直角、独立平面直角。 10、绝对高程:地面点沿铅垂线到大地水准面的距离。相对高程:某点到任意水准面的距离。 11、高差:地面上两点之间高程差。 12、半径为10km范围内面积为320km2之内可以用水平面代替水准面时距离产生的误差可忽略不计;测距范围的100km2时,用平面代替水准面时对角度的影响可忽略不计;在高程测量中即使很短的距离也不可忽略。 13、测量工作的原则:a由整体到局部、由控制到碎部;b步步检核。14、测量的基本工作:测角、量边、测高程。15、测绘的基本工作:确定地面点的基本位置。 16、施工测量包括:建筑物施工放样、建筑物变形监测、工程竣工测量。 17、高程测量:测量地面上各点高程的工作。18、水准测量的实质:测量地面上两点之间的高差,是利用水准仪所提供的一条水平视线来实现的。19、高差计算方法:高差法、仪高法。 20、水准仪按构造可分为:微倾式、自动安平、数字水准仪,及水准尺和尺垫。 21、DS3构造:望远镜、水准器,基座。22、水准仪轴线之间的几何条件:a圆水准器轴平行于竖轴b十字丝横丝垂直于竖丝c水准管轴平行于视准轴。23、尺垫的作用:减少水准尺下沉和标志转点。24、水准尺的使用:粗平、瞄准、精平、读数。 24、水准点的分类:永久性和临时性。25、测站的检核方法:双面尺法和双仪高法。 26、水准路线检核方法:闭合水准路线、附合水准路线、支水准路线、水准网。 27、误差:仪器误差,观测误差、外界条件的影响。 28、角度测量:水平角和竖直角测量。29、经纬仪:光学和电子经纬仪。 30、DJ6:基座、水平度盘、照准部(望远镜、竖直度盘、水准管、读数显微镜) 31、经纬仪的使用步骤:对中、整平、瞄准、读数。32、水平角测量方法:测回法,方向观测法。33、距离测量常用的方法:钢尺直接、视距法、电磁波、卫星测距。 34、钢尺量距的误差:定线、尺长、温度测定、钢尺倾斜、拉力不均、钢尺对准、读数。 35、视距测量:利用望远镜内的视距装置配合视距尺根据几何光学和三角测量原理,同时测定距离高差的方法。 36、全站仪功能:角度测量、距离测量、坐标及高程测量、特殊测量功能。 37、直线定向:选择一个标准方向再根据直线与标志方向之间的关系确定该直线方向。 38、测量常用的标准方向线:真子午线、磁子午线、坐标纵轴方向。 39、误差来源:测量仪器、观测者、外界环境条件。 40、测量误差的种类:粗差、系统误差、偶然误差。 41、系统误差:在相同条件下,在某量进行的一系列观测中,数值大小和正负符号固定不变,或按一定规律变化的误差。 42、偶然误差:在相同条件下,在某量进行的一系列观测中,单个误差的出现没有一定的规律性,其数值的大小和符号都不固定,表现出偶然性,但大量的误差却具有一定统计规律。 43、偶然误差的特性:a在一定观测条件下,偶然误差的绝对值不会超过一定限度,即偶然误差是有界的;b绝对值小的误差比绝对值大的误差出现的机会大;c绝对值相等的正负误差出现的个数大致相等;d偶然误差的算术平均值随着观测次数的无限增加趋与零。 44、控制测量:在一定区域内为地形测图和工程测量建立控制网,所进行的测量工作。
GPS测量操作与数据处理复习资料
第一部分GPS静态测量第一章 GPS静态测量基础 1相对定位指的是在进行GPS定位时,多台同步接收机进行同步观测,采集同步观测数据;在数据处理时,则利用这些同步观测数据,计算出同步观测站之间的相对位置(坐标差/基线向量。) 2数据处理过程一般包括基线处理、网平差、坐标转换和高程转换,最终求出高精度的网点坐标。 3 GPS测量型接收机一般分为单频和双频两大类。单频GPS测量型接收机,接收信号:GPS 导航电文、C/A码、L1载波。双频GPS测量型接收机(双频GPS测量仪),接收信号:GPS 导航电文、C/A码伪距、P码伪距、L1载波相位、L2载波相位。 第二章 GPS静态测量工作的流程 1一般GPS静态测量工作分为三个阶段,即测前准备、玩野实施和数据处理。 2测前准备阶段的主要工作包括项目立项、技术设计、实地踏勘、设备检定、资料收集整理、人员组织等。 3测量实施的内容包括:实地了解测区情况、卫星状况预报、确定作业方案、外业观测。 4 GPS基线向量网被分成了A、B、C、D、E五个级别。 C级网为地方控制网和工程控制网;D级网为工程控制网;E级网为测图网。 5 GPS网常用的布网形式有以下几种:跟踪站式、会战式、多基准站式、同步图形扩展式、单基准站式。 跟踪站式:若干台接收机长期固定安放在测站上,进行常年、不间断的观测,即一年观测365天,一天观测24小时,这种观测方式很像是跟踪站,因此,这种布网形式被称为跟踪站式。特点:不间断的连续观测,观测时间长,数据量大,采用精密星历,成本高。 会站式:在布设GPS网时,一次组织多台GPS接收机,集中在一段不太长的时间内,共同作业。在作业时,所有接收机在若干天的时间里分别在同一批点上进行多天、长时段的同步观测,在完成一批点的测量后,所有接收机又都迁移到另外一批点上进行相同方式的观测,直至所有的网点观测完毕,这就是所谓的会站式的布网。特点:较长时间、多时段观测,可以较好地消除SA等因素,有特高的尺度精度。 多基准站式:就是有若干台接收机在一段时间里长期固定在某几个点上进行长时间的观测,这些测站称为基准站。在基准站进行观测的同时,另外一些接收机则在这些基准站周围相互之间进行同步观测。 同步图形扩展式:就是多台接收机在不同测站上进行同步观测,在完成一个时段的同步观测后,又迁移到其他的测站上进行同步观测,每次同步观测都可以形成一个同步图形。在测量过程中,不同的同步图形间一般有若干个公共点相连,整个GPS网由这些同步图形构成。 特点;扩展速度快,图形强度较高,作业方法简单。 单基准站式:又称做星形网方式,它是以一台接收机作为基准站,在某个测站上连续开机观测,其余的接收机在此基准站观测期间,在其周围流动,每到一点就进行观测,流动的基准站之间一般不要求同步,这样,流动的接收机每观测一个后四段,就与基准站间测得一
测量平差概要
测量平差概要 一、基本概念 01、极条件的个数等于中点多边形、大地四边形和扇形的总数。 02、在间接平差中,独立未知量的个数等于必要观测数。 03、协方差与权互为倒数。 04、在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理。 05、在间接平差中,误差方程的个数等于观测值的个数。 06、协因数阵与权阵互为逆阵。 07、偶然误差的四个统计特性是:有界性、聚中性、对称性和抵偿性。 08、圆周条件的个数等于中点多边形的个数。 09、偶然误差服从正态分布。 10、只有包含中点多边形的三角网才会产生圆周角条件。 11、条件平差的法方程个数等于多余观测个数,间接平差的法方程的个数等于必要观测数。 12、描述偶然误差分布常用的三种方法是:列表法、绘图法、密度函数法。 13、同一个量多次不等精度观测值的最或是值等于其加权平均值。 14、应用权倒数传播律时观测值间应误差独立。 15、极限误差是指测量过程中规定的最大允许误差值,通常取测量中误差的3倍作为极限误差。 16、在平地,水准测量的高差中误差与水准路线长度的算术平方根成正比。 17、在水准测量中要求前后视距相等是为了消除i角产生的系统误差。 18、在测角中正倒镜观测是为了消除系统误差。 19、水准网的必要起算数据为1个,独立测角网的必要起算数据为4个。 20、在水准测量中估读尾数不准确产生的误差是偶然误差。 21、独立测角网的条件方程有图形条件、圆周条件和极条件三种类型。 22、定权时单位权中误差可任意给定,它仅起比例常数的作用。 23、测角精度与角度的大小无关。 24、观测值的权通常是没有量纲的。 25、在山地,水准测量的高差中误差与测站数的算术平方根成正比。 26、测角网的必要观测个数等于待定点个数的2倍。
误差理论与测量平差基础
《误差理论与测量平差基础》授课教案 2006~2007第一学期 测绘工程系 2006年9月
课程名称:误差理论与测量平差基础 英文名称: 课程编号:?? 适用专业:测绘工程 总学时数: 56学时其中理论课教学56学时,实验教学学时 总学分:4学分 ◆内容简介 《测量平差》是测绘工程等专业的技术基础课,测量平差的任务是利用含有观测误差的观测值求得观测量及其函数的平差值,并评定其精度。 本课程的主要内容包括误差理论﹑误差分布与精度指标﹑协方差传播律及权﹑平差数学模型与最小二乘原理﹑条件平差﹑附有参数的条件平差﹑间接平差﹑附有限制条件的间接平差﹑线性方程组解算方法﹑误差椭圆﹑平差系统的统计假设检验和近代平差概论等。 ◆教学目的、课程性质任务,与其他课程的关系,所需先修课程 本课程的教学目的是使学生掌握误差理论和测量平差的基本知识、基本方法和基本技能,为后续专业课程的学习和毕业后从事测绘生产打下专业基础。 课程性质为必修课、考试课。 本课程的内容将在测绘工程和地理信息系统专业的专业课程的测量数据处理内容讲授中得到应用,所需先修课程为《高等数学》、《概率与数理统计》、《线性代数》和《测量学》等。 ◆主要内容重点及深度 考虑到专业基础理论课教学应掌握“必须和够用”的原则,结合测绘专业建设的指导思想,教学内容以最小二乘理论为基础,误差理论及其应用、平差基本方法与计算方法,以及平差程序设计及其应用为主线。 测量误差理论,以分析解决工程测量中精度分析和工程设计的技术问题为着眼点,在掌握适当深度的前提下,有针对性的加强基本理论,并与实践结合,突出知识的应用。 平差方法,以条件平差和参数平差的介绍为主,以适应电算平差的参数平差为重点。 计算方法,以介绍适应电子计算机计算的理论、方法为主,建立新的手工计算与计算机求解线性方程组过程相对照的计算方法和计算格式。 平差程序设计及其应用,通过课程设计要求学生利用所学程序设计的知识和平差数学模型编制简单的平差程序,熟练掌握已有平差程序的使用方法。
实验测量玻璃的折射率
《测量玻璃的折射率》学习材料 【教学目的】 1.测定一块玻璃砖的折射率; 2.验证光的折射定律。 【实验器材】 1块矩形玻璃砖、刻度尺、量角器、1张8开白纸、4枚大头针、1块木板、铅笔 【实验原理】 用两面平行的玻璃砖来测定玻璃的折射率。当光线斜入射进入两面平行的玻璃砖时,从玻璃砖射出的光线的传播方向是不变的,出射光线跟入射光线相比只有一定得侧移。只要我们找出跟某一入射光线对应的出射光线,就能求出在玻璃中对应的折射光线,从而求出折射角。再根据折射定律,就可以求出玻璃的折射率n=sin i /sin r 。 插针法确定光路的基本原理:当后两枚大头针与前两枚大头针在玻璃中的虚像处于同一视线上时,四枚大头针处于同一光路上。 【实验步骤】 1、把白纸用图钉固定在木板上。 2、在白纸上画一条直线aa '作为界面(如图所示),过aa '上一点O 作垂直于aa '的直线NN ′作为法线,过O 点画一条入射光线AO ,使入射角i 适当大些。 3、在AO 线上竖直地插两枚大头针1P 、2P ,在白纸上放上被测玻璃砖,使玻璃砖的一个面与aa '重合。 4、沿玻璃砖的另一侧面画一条直线bb '。 5、在玻璃砖的bb '一侧白纸上竖直地立一枚大头针3P ,调整视线,同时移动3P 的位置,使3P 恰好能同时挡住1P 、2P 的像,把大头针3P 竖直插在此时位置。
6、同样,在玻璃砖bb '一侧再竖直地插一枚大头针4P ,使4P 能挡住3P 本身,同时也挡住1P 、2P 的像。 7、移去玻璃砖,拔去大头针,过3P 、4P 做一条直线BO '交bb '于O '点,连接OO ', OO '就是入射光线AO 在玻璃砖内的折射光线,折射角为r 。 8、用量角器量出入射角i 和折射角r 的大小。 9、改变入射角i ,重复上面的步骤再做三、四次。 10、算出不同入射角时,n =sin i /sin r 的值,求出几次实验中n 的平均值就是玻璃的折射率。(或图像法求折射率:用sin i 表示纵坐标,用sin r 表示横坐标,则图线的斜率就是玻璃的折射率。) 注:遇到通过作图判断两个量的关系的方法(不是线性关系的,化成线性关系); 【记录数据】 数项值 次数 1 2 3 入射角i 折射角r sin i sin r n =sin i /sin r 【注意事项】 1、玻璃砖应选择宽度较大的(一般要求5cm 以上),以减小确定光路方向时出现的误差,提高测量的准确度。 2、操作时不要用手触摸玻璃砖的光滑光学面,更不能把玻璃砖界面当尺子画界线,以免损坏玻璃砖的光学表面。(先在白纸上画直线作为玻璃砖的界面,再画玻璃砖的另一界面时,对齐玻璃砖的另一长边,用大头针确定两点,并以此两点画直线bb '作为玻璃砖的另一界面。) 3、大头针应垂直地插在纸上,同侧两针之间的距离要稍大些;
《误差理论与测量平差基础》考研复习大纲
《误差理论与测量平差基础》考研复习大纲(年) 第一章、绪论(分) 了解系统误差、偶然误差、粗差及其处理方法; 掌握测量平差学科的研究对象; 理解测量平差任务; 了解本课程的任务和内容。 第二章、误差分布与精度指标(分) 理解偶然误差的特性; 掌握衡量精度的绝对指标和相对指标,精度、准确度与精确度; 理解测量不确定度。 第三章、协方差传播律及权(分) 掌握方差协方差阵、权、权阵、协因数、协因数阵的概念及其表示方法;掌握协方差传播律及其应用; 熟练掌握权与定权的常用方法,协因数、协因数传播律及其应用, 理解由观测值函数的真误差估计中误差的方法; 了解系统误差的传播。 第四章、平差数学模型与最小二乘原理(分) 掌握测量平差数学模型的基本概念; 掌握各种平差问题必要观测数,多余观测数的确定方法; 掌握测量平差的函数模型,函数模型的线性化, 掌握参数估计与最小二乘平差准则。 第五章、条件平差(分) 熟练掌握条件数的确定,条件平差原理; 掌握各种平差问题条件方程的建立;
掌握法方程的组成与解算,精度评定。 第六章、附有参数的条件平差(分) 了解附有参数的条件平差函数模型和随机模型的建立; 掌握法方程的组成与解算,精度评定。 第七章、间接平差(分) 掌握间接平差原理,误差方程的建立; 掌握法方程的组成与解算,精度评定; 掌握间接平差应用(直接平差,三角网坐标平差,导线网间接平差,网平差)。 第八章、附有限制条件的间接平差(分) 掌握附有限制条件的间接平差原理; 掌握误差方程、条件方程列立; 掌握法方程的组成与解算,精度评定。 第九章、概括平差函数模型(分) 熟悉基本平差方法的概括函数模型; 附有限制条件的条件平差原理,精度评定; 熟悉各种平差方法的共性与特征; 理解平差结果的统计性质。 第十章、误差椭圆(分) 了解点位误差概念以及计算方法; 掌握任意方向的位差计算; 点位误差的极大值和极小值的计算; 理解误差曲线的基本概念; 掌握误差椭圆元素计算。
玻璃折射率的测量方法
课程论文 题目:对玻璃折射率测定方法的探究 班级:2010级物理学本科班 姓名: 学号: 指导老师: 对玻璃折射率测定方法的探究
摘要:通过不同的方法测定玻璃的折射率,在对实验现象观察的同时,比较不同的方法之间的区别,并将实验结果与真实值比较。 关键词:玻璃,分光计,顶角,偏向角,折射率。 引言:运用钠灯灯光或激光照射玻璃,通过观察折射或反射光的性质来确定玻璃的折射率。 实验方法: (一) 最小偏向角法: 1. 实验仪器与用具:分光计,玻璃三棱镜,钠灯。 2. 实验原理: (1)将待测的光学玻璃制成三棱镜,可用最小偏向角法测其折射率n .测量原理见图1,光线α代表一束单色平行光,以入射角i 1投射到棱镜的AB 面上,经棱镜两次折射后以i 4角从另一面AC 射出来,成为光线t .经棱镜两次折射,光线传播方向总的变化可用入射光线α和出射光线t 延长线的夹角δ来表示,δ称为偏向角.由图1可知δ=(i 1-i 2)+(i 4-i 3)=i 1+i 4-A .此式表明,对于给定棱镜,其顶角 A 和折射率n 已定,则偏向角δ随入射角i 1而变,δ是i 1的函数. (2)用微商计算可以证明,当i 1=i 4或i 2=i 3时,即入射光线a 和出射光线t 对称地“站在”棱镜两旁时,偏向角有最小值,称为最小偏向角,用δm 表 示.此时,有i 2=A /2, i 1=(A +δm )/2,故2 2m A A n sin sin δ+=。用分光计测出棱 镜的顶角A 和最小偏向角δm ,由上式可求得棱镜的折射率n . 3.实验内容: 3.1棱镜角的测定 图1
置光源于准直管的狭缝前,将待测棱镜的折射棱对准准直管,由准直管射出的平行光束被棱镜的两个折射面分成两部分。在棱镜的另外两侧分别找到狭缝像与竖直叉丝重合,分别记录此时分光计的读数''1212,,,V V V V ,望远镜的两位置所对应的游标读数之差为棱镜角A 的两倍。 3.2最小偏向角的测定 (1)将待测棱镜放置在棱镜台上,转动望远镜使能清楚地看见钠光经棱镜折射后形成的黄色谱线。 (2)刻度内盘固定。缓慢转动载物台,改变入射角,使谱线往偏向角减小的方向移动,用望远镜跟踪谱线观察。 (3)当载物台转到某一位置,该谱线不再移动,如继续按原方向转动载物台,可看到谱线反而往相反的方向移动,即偏向角变大。该谱线偏向角减小的极限位置即为最小偏向角位置。 (4)反复实验,找出谱线反向移动的确切位置。固定载物台,微动望远镜,使叉丝中间竖线对准谱线中心,记录此时分光计的读数12,V V 。 (5)转动载物台,使光线从待测棱镜的另一光学面入射,转动望远镜至对称位置,使光线向另一侧偏转,同上找出对应谱线的极限位置,相应的游标读数为 ' ' 12V V 和。同一游标左右两次数值之差是最小偏向角的2 倍,即 '' 1122()/4m V V V V δ=-+- 4.实验数据记录 表2:最小偏向角
测量平差题目及答案
《误差理论与测量平差基础》课程试卷A 2010-06-27 11:30:49 来源:《误差理论与测量平差基础》课程网站浏览:4次 武汉大学测绘学院 2007-2008学年度第二学期期末考试 《误差理论与测量平差基础》课程试卷A 出题者课程小组审核人 班级学号姓名成绩 一、填空题(本题共20个空格,每个空格1.5分,共30分) 1、引起观测误差的主要原因有(1)、(2)、(3)三个方面的因素,我们称这些因素为(4)。 2、根据对观测结果的影响性质,观测误差分为(5)、(6)、(7)三类,观测误差通过由于(8)引起的闭合差反映出来。 3、观测值的精度是指观测误差分布的(9)。若已知正态分布的观测误差落在区间的概率为95.5%,则误差的方差为(10),中误差为(11)。 4、观测值的权的定义式为(12)。若两条水准路线的长度为、,对应的权为2、1,则单位权观测高差为(13)。 5、某平差问题的必要观测数为,多余观测数为,独立的参数个数为。若,则平差的函数模型为(14)。若(15),则平差的函数模型为附有参数的条件平差。 6、观测值的权阵为,的方差为3,则的方差为(16)、 的权为(17)。 7、某点的方差阵为,则的点位方差为(18)、误差曲线的最大值为(19)、误差椭圆的短半轴的方位角为(20)。 二、简答题(本题共2小题,每题5分,共10分)
1、简述观测值的精度与精确度含义及指标。 在什么情况下二者相同? 2、如图1所示,A、B、C、D为已知点,由A、C分别观测位于直线AC上的点。观测边长、及角度、。问此问题的多余观测数等于几?若采用条件平差法计算,试列出条件方程式(非线性方程不必线性化)。 图1 三、(10分)其它条件如上题(简答题中第2小题)。设方位角,观测边长,中误差均为,角度、的观测中误差为 。求平差后点横坐标的方差(取)。 四、(10分)采用间接平差法对某水准网进行平差,得到误差方程及权阵(取 ) (1)试画出该水准网的图形。 (2)若已知误差方程常数项,求每公里观测
玻璃折射率的测定
一 用最小偏向角法测棱镜玻璃折射率 【实验目的】 1.进一步熟悉分光计调节方法; 2.掌握三棱镜顶角,最小偏向角的测量方法。 【实验仪器】 JJY 型分光计、低压钠灯、平面反射镜、等边三棱镜。 【实验原理】 一束平行的单色光,从三棱镜的一个光学面(AB 面)入射,经折射后由另一光学面(AC 面)射出,如图5.11.1所示。入射光和AB 面法线的夹角i 称为入射角,出射光和AC 面法线的夹角i '称为出射角,入射光和出射光的夹角δ称为偏向角。可以证明,当入射角i 等于出射角i '时,入射光和反射光之间的夹角δ最小,称为最小偏向角m in δ。 由图5.11.1可知)''()(r i r i -+-=δ,当'i i =时,由折射定律有'r r =,得 )(2min r i -=δ (5.11.1) 又 因 A A G r r r =-π-π=-π==+)(2' 所以 = r 2 A (5.11.2) 由式(5.11.1)和式(5.11.2)得 2 min δ+= A i 由折射定律有 2 sin 2sin sin sin min A A r i n δ+== (5.11.3) 由式(5.11.3)可知,只要测出最小偏向角min δ(顶角已知),就可以计算出棱镜玻璃对该波长的折射率。 图5.11.2 测最小偏向角示意图 A B C A i i ' r r ' 12δ① ②图5.11.1
【实验内容】 1.正确调整分光计,使其满足实验要求(参阅§3.9) 2.测定玻璃三棱镜对钠光黄光的最小偏向角 如图5.11.2所示,旋载物台,使一光学面AC 与平行光管入射方向基本上垂直。当一束钠黄单色光从平行光管发出平行光射向三棱镜AB 光学面,经过三棱镜AC 光学面折射出来,望远镜从毛面BC 底边出发,沿着逆时针旋转,会看到清晰的狭缝像,说明找到折射光路。此时转动小平台连同棱镜,观察狭缝像运动状态,如果向右移动,偏向角δ变小。再转小平台狭缝像会走到一定位置转折,使δ偏大,此转折点即为该光谱线的最小偏向角位置,把望远镜对准这个转折点,记录下来,为m in T 、min 'T 。然后使望远镜对准入射光(平行光管位置),读取方位为0T 与0'T ,则最小偏向角 ]''[2 1 0min 0min min T T T T -+-=δ 3.计算棱镜折射率 ]''[2 1 0min 0min min T T T T -+-=δ 平均== δ- - n min 4.不确定度计算(绝对不确定度传递公式) min 22min 22)22()( δδ?+???=?n a n a n 5.结果表示 n n n ?±=- 【注意事项】
测量平差基础名词解释
第一章 1、观测误差产生的原因很多,概括起有以下三种:测量仪器(感觉器官的局限、技术水平、 工作态度)、观测者(具有一定限度的准确度)、外界条件(温度、湿度、风力、大气折光等)。 2、偶然误差:在相同的观测条件下作一系列的观测,如果误差在大小和符号上都表现出偶然性,即从单个误差看,该列误差的大小和符号没有规律性,但就大量误差的总体而言,具有一定的统计规律,这种误差称为偶然误差,也叫随机误差。 采取措施:处理带有偶然误差的观测值,就是本课程的内容,也叫做测量平差。 3、系统误差:在相同的观测条件下作一系列的观测,如果误差在大小、符号上表现出一致性,或者在观测过程中按一定的规律变化,或者为一常数,这种误差就称为系统误差。 消除或削弱的方法:采取合理的操作程序(正、倒镜,中间法,对向观测等);用公式改正,即加改正数。 4、粗差:粗差即粗大误差,或者说是一种大量级的观测误差,是由于测量过程中的差错造成的。 发现、剔除粗差的方法:进行必要的重复测量或多余观测,采用必要而又严格的检核、验算等,发现后舍弃或重测。 5、测量平差两大任务:(1)、求平差值(求未知量的最佳估值);(2)、精度评定(评定测量成果精度)。 6、测量平差 7 8 9、真值:任一观测量,客观上总是存在一个能代表其真正大小的数值,这一数值就称为该观测值真值 10、真误差:真值与观测值之差 11、残差(改正数):改正数(V)= 平差值()- 观测值() 12、偶然误差的四个统计特性: (1)一定观测条件下,误差绝对值有一定限值(有限性); (2)绝对值较小的误差比绝对值较大的误差出现概率大(渐降性); (3)绝对值相等的正负误差出现概率相同(对称性); (4)偶然误差的数学期望为零(抵偿性) 13、平均误差:在一定的观测条件下,一组独立的偶然误差绝对值的数学期望,称为平均误差 14、或然误差:误差出现在(- ρ,+ ρ)之间的概率等于1/2,即 15、极限误差:通常将三倍(或两倍)的中误差作为极限误差,即 16、相对中误差的定义是:中误差与观测值之比,即 17、精度:是指误差分布的密集或离散程度,即:L与E(L)接近程度。 18、准确度:又名“准度”,是指随机变量X的真值与其数学期望之差,(是衡量系统误差大小程度的指标)
现代测量平差与数据处理理论的进展
技术专题 编者按 本刊2009年第6期刊登了 信息化测绘时代的工程测量技术发展 技术专题综述部分和数据获取部分的两篇论文,在读者中引起强烈反响,大家对该专题后续论文的刊出给予了期待。本期以 数据处理与管理 部分为重点,向读者奉献3篇论文: 现代测量平差与数据处理理论的进展 (由中南大学朱建军教授等撰写)、 工程数据库的发展要素与建设 (由建设综合勘察研究院黄坚研究员等撰写)和 工程测量标准体系的构建与发展 (由中国有色金属工业西安勘察设计研究院郭渭明教授等撰写),分别从现代测量平差与数据处理理论、工程数据库、工程测量标准体系三个方面论述了 数据处理与管理 的基础理论、技术方法和发展趋势等。同时,本期还刊登 综述 部分之 工程测量在信息化测绘战略跨越中的拓展 (由北京城建勘测设计研究院秦长利教授撰写)和 典型应用 部分之 激光雷达国家体育馆屋顶钢结构安装滑移质量监测 (由北京建筑工程学院王晏民教授等撰写)。前者对在信息化测绘战略跨越中工程测量采用卫星定位测量、摄影测量、GIS、大型工程精密工程测量、轨道交通精密施工测量和变形监测等技术和方法及其应用成果进行了论述;后者探讨了激光雷达技术应用于国家体育馆屋顶钢结构安装与质量监测的作业流程、特征数据提取及精度分析等。 现代测量平差与数据处理理论的进展 朱建军,宋迎春 (中南大学信息物理工程学院,长沙 410083) 摘要:本文首先简述了现代测量平差中的各种理论与经典测量平差之间的关系,指出现代测量平差与数据处理理论仍然是以高斯-马尔柯夫模型为核心,通过该模型在不同层面上的扩充、发展形成了若干新理论、新方法,并以图描述了经典测量与现代测量数据处理中各种理论之间的关系。然后分别阐述了现代测量数据处理中粗差理论、系统误差的处理、病态问题的处理、非线性问题的处理、不等式约束的平差等的发展,最后综述了其他数据处理理论的一些发展情况。 关键词:经典测量平差;现代测量平差;高斯-马尔柯夫误差模型;误差模型扩展 中图分类号:P207文献标识码:B Progress of modern surveying adjustment and theory of data processing Zhu Jianjun,Song Yingchun (School of Geomatics,Central South Unive rsity,Chan gsha 410083,China) Abstract:This paper described the relationship between the theories in modern surveying adjustment and the traditional surveying adjustment.It pointed out that the theories of modern surveying adjustment and the data processing should be still based on Gauss-Markov error model.Through enlarge ment and development in different aspects of the model,ne w theories and methods are worked out.A figure showing such relationship is given. Meanwhile,the theories on blunder detec tion,systematic error processing,il-l pose problem,nonlinear model, inequality constraints are elaborated.At the last the progresses of other theories on data processing are summarized. Key words:traditional surveying adjustment;modern surveying adjustment;Gauss-Markov error model; e xtension o f error model 收稿日期:2009-09-28 作者简介:朱建军(1962-),男(汉族),湖南双峰人,博士,教授.
测量平差 第三章习题与答案
测量平差第三章思考题 3.1 下列各式中的()1,2,3i L i =均为等精度独立观测值,其中误差为σ,试求X 的中误差: (1)()12312 X L L L =++; (2)12 3 L L X L = 3.2 已知观测值1L ,2L 的中误差12σσσ==,120σ=,设11225,2X L Y L L =+=-, 12Z L L =,t X Y =+,试求X ,Y ,Z 和t 的中误差。 3.3 设有观测向量[]1 2 331 T L L L L =,其协方差阵为 4 000300 2LL D ?? ??=?????? 分别求下列函数的的方差: (1)1133F L L =-; (2)2233F L L = 3.4 设有同精度独立观测值向量[]1 2 3 31 T L L L L =的函数为113 s i n s i n AB L Y S L =, 22AB Y L α=-,式中A B α和AB S 为无误差的已知值,测角误差1"σ=,试求函数的方差1 2 y σ、 2 2 y σ 及其协方差12 y y σ 3.5 在图中△ABC 中测得A A σ∠±,边长b b σ±,c c σ±,试求三角形面积的中误差s σ 。 3.6 在水准测量中,设每站观测高差的中误差均为1mm ,今要求从已知点推算待定点的高程中误差不大于5cm ,问可以设多少站? 3.7 有一角度测4个测回,得中误差为0.42〃,问再增加多少个测回其中误差为0.28〃? 3.8 在相同观测条件下,应用水准测量测定了三角点A ,B ,C 之间的高差,设三角形的边
长分别为S 1=10km ,S 2=8km ,S 3=4km ,令40km 的高差观测值权威单位权观测,试求各段观测高差之权及单位权中误差。 3.9 以相同观测精度A ∠和B ∠,其权分别为14 A P =,12 B P =,已知8"B σ=,试求单位 权中误差0A σ∠和的中误差A σ。 3.10 已知观测值向量21L 的权阵为522 4LL P -?? =? ?-?? ,试求观测值的权1L P 和2L P 答案: 3.1 (1)x σ= , (2)3 x L σ= 3.2 2x σσ=,y σ=,z σ= ,t σ= 3.3 1 22F D =,22 2 231827F D L L =+ 3.4 ()1 222 2 2 113"2 2 3 cos sin cot sin AB y S L L L L σ ρ = +? ()222 1y σ=秒 12 0y y σ = 3.5 s σ= 3.6 最多可设25站 3.7 再增加5个测回 3.8 1 4.0P =,2 5.0P =,310.0P =,0()km σ= 3.9 "0 5.66σ=," 11.31A σ= 3.10 1 4L P =,2 165 L P =
测量平差复习题及答案
测量平差复习题及答案 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
测量平差复习题及答案 一、综合题 1.已知两段距离的长度及中误差分别为cm m5.4 465 . 300±及 cm m5.4 894 . 660±,试说明这两段距离的真误差是否相等他们的精度是否相等 答:它们的真误差不一定相等;相对精度不相等,后者高于前者。2.已知观测值向量 ?? ? ? ? ? = 2 1 21L L L 的权阵为 ? ? ? ? ? ? ? ? = 3 2 3 1 3 1 3 2 LL P ,现有函数 2 1 L L X+ =, 1 3L Y=,求观测值的权 1 L P, 2 L P,观测值的协因数阵 XY Q。 答: 1 2/3 L P=; 2 2/3 L P=;3 XY Q= 3.在下图所示三角网中,A.B为已知点,4 1 ~P P为待定点,已知3 2 P P边的边长和方位角分别为0S和0α,今测得角度14 2 1 , , ,L L L 和边长 2 1 ,S S,若按条件平差法对该网进行平差: (1)共有多少个条件方程各类条件方程各有多少个 (2)试列出除图形条件和方位角条件外的其它条件方程(非线性条件方程不要求线性化)
答:(1)14216,6,10n t r =+=== ,所以图形条件:4个;极条件:2个;边长条件:2个;基线条件:1个;方位角条件:1个 (2)四边形14ABPP 的极条件(以1P 为极): 34131 241314 ????sin()sin sin 1????sin sin sin()L L L L L L L L +??=+ 四边形1234PP P P 的极条件(以4P 为极): 101168 91167????sin()sin sin 1????sin sin sin() L L L L L L L L +??=+ 边长条件(1?AB S S - ):1 23434??????sin()sin() AB S S L L L L L = +++ 边长条件(12 ??S S - ):112 1314867???sin ?????sin()sin sin() S L S L L L L L ?= ++ 基线条件(0AB S S - ): 02 101191011?????sin()sin() S S L L L L L =+++ 4.A .B .C 三点在同一直线上,测出了AB .BC 及AC 的距离,得到4个独立观测值,m L 010.2001=,m L 050.3002=,m L 070.3003=, m L 090.5004=,若令100米量距的权为单位权,试按条件平差法确定A .C 之间各段距离的平差值L ?。 答:?[200.0147,300.0635,300.0635,500.0782]T L = 5.在某航测像片上,有一块矩形稻田。为了确定该稻田的面积,现用卡 规量测了该矩形的长为cm L 501=,方差为2 2136.0cm =σ,宽为cm L 302=,方
间接平差原理
§4-1 间接平差原理 2学时 间接平差法(参数平差法)是通过选定t个与观测值有一定关系的独立未知量作为参数,将每个观测值都分别表达成这t个参数的函数,建立函数模型,按最小二乘原理,用求自由极值的方法解出参数的最或然值,从而求得各观测值的平差值。 例如,在一个三角形中,等精度独立观测了三个角,观测值分别为L1、L2 和L3。求此三角形各内角的最或然值。若能选取两个内角的最或然值作为参数、,则可以建立参数与观测值之间的函数关系式 (4-1-1)可得 (4-1-2) 为了计算方便和计算数值的稳定性,通常引入未知参数的近似值,这一点在实际计算中是非常重要的,令,则(4-1-2)式可写成如下形式: (4-1-3)
式(4-1-2)叫做误差方程,也可以称为某种意义上的条件方程(包含改正数、观测值和参数,“条件个数=观测值个数”),每个条件方程中仅只含有一 个观测值,且系数为1。单纯为消除矛盾,、、可有多组解,为此引入最小二乘原则:可求得唯一解。因此,间接平差是选取与观测值 有一定关系的独立未知量作为参数,建立参数与观测值之间的函数关系,按最小二乘原则,求解未知参数的最或然值,再根据观测值与参数间的函数关系,求出观测值的最或然值,故又称为参数平差。对上述三角形,引入最小二乘原则,要 求:,设观测值为等精度独立观测,则有: 按数学上求自由极值的方法对上式分别求偏导数并令等于零,可得 代入误差方程式,得到观测值的最或然值 此结果显然与采用条件平差方法解算的结果一致,说明只要遵循相同的平差原则、定权方法相同,平差结果与具体平差方法无关。
一般地,间接平差的函数模型为 (4-1-4) 平差时,为了计算方便和计算的数值稳定性,一般对参数都取近似值, 令 (4-1-5) 代入(4-1-4)式,并令 (4-1-6) 由此可得误差方程 (4-1-7) 式中为误差方程的自由项,对于经典间接平差,将未知参数视为非随机参 数,不考虑其先验统计性质,根据(4-1-5)式,可得平差后,由(4-1-6) 式可得。 间接平差的随机模型为 (4-1-8) 平差准则为 (4-1-9) 间接平差就是在最小二乘准则要求下求出误差方程中的待定参数,在数学中 是求多元函数的自由极值问题。
●测量平差复习题最新版
《测量平差》复习题 第一章:绪论 1、什么是观测量的真值? 任何观测量,客观上总存在一个能反映其真正大小的数值,这个数值称为观测量的真值。 2、什么是观测误差? 观测量的真值与观测值的差称为观测误差。 3、什么是观测条件? 仪器误差、观测者和外界环境的综合影响称为观测条件。 4、根据误差对观测结果的影响,观测误差可分为哪几类? 根据误差对观测结果的影响,观测误差可分为系统误差和偶然误差两类。 5、在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理。 6、观测条件与观测质量之间的关系是什么? 观测条件好,观测质量就高,观测条件差,观测质量就低。 7、怎样消除或削弱系统误差的影响? 一是在观测过程中采取一定的措施;二是在观测结果中加入改正数。 8、测量平差的任务是什么? ⑴求观测值的最或是值(平差值); ⑵评定观测值及平差值的精度。 第二章:误差理论与平差原则 1、描述偶然误差分布常用的三种方法是什么? ⑴列表法; ⑵绘图法; ⑶密度函数法。 2、偶然误差具有哪些统计特性? (1) 有界性:在一定的观测条件下,误差的绝对值不会超过一定的限值。 (2) 聚中性:绝对值较小的误差比绝对值较大的误差出现的概率要大。 (3) 对称性:绝对值相等的正负误差出现的概率相等。 (4) 抵偿性:偶然误差的数学期望或偶然误差的算术平均值的极限值为0。 3、由偶然误差特性引出的两个测量依据是什么? ⑴制定测量限差的依据; ⑵判断系统误差(粗差)的依据。 4、什么叫精度? 精度指的是误差分布的密集或离散的程度。 5、观测量的精度指标有哪些?
(1) 方差与中误差; (2) 极限误差; (3) 相对误差。 6、极限误差是怎样定义的? 在一定条件下,偶然误差不会超过一个界值,这个界值就是极限误差。通常取三倍中误差为极限误差。当观测要求较严时,也可取两倍中误差为极限误差。 7、误差传播律是用来解决什么问题的? 误差传播律是用来求观测值函数的中误差。 8、应用误差传播律的实际步骤是什么? (1) 根据具体测量问题,分析写出函数表达式),,,(21n x x x f z =; (2) 根据函数表达式写出真误差关系式n n x x f x x f x x f z ???++???+???=? 2211; (3) 将真误差关系式转换成中误差关系式。 9、水准测量的高差中误差与测站数及水准路线长度有什么关系? 当各测站的观测精度相同时,水准测量的高差中误差与测站数的算术平方根成正比;当各测站的距离大致相等时,水准测量的高差中误差与水准路线长度的算术平方根成正比。 10、什么是单位权?什么是单位权中误差? 权等于1时称为单位权,权等于1的中误差称为单位权中误差。 11、应用权倒数传播律时应注意什么问题? 观测值间应误差独立。 12、观测值的权与其协因数有什么关系? 观测值的权与其协因数互为倒数关系。 13、怎样计算加权平均值的权? 加权平均值的权等于各观测值的权之和。 证明:n n L P P L P P L P P P PL x ] [][][][][2211+++== 应用权倒数传播律,有: ][1][1)][(1)][(1)][(12 2122221 21P P P P P P P P P P P P P P P n n n x =+++= +++=