传感器动态建模的一种辨识法
计算与测试
传感器动态建模的一种辨识法*
张 华,次 英,谢 植
(东北大学信息科学与工程学院,辽宁沈阳110004)
摘 要:提出一种简单但鲁棒性强的传感器动态建模方法,该方法基于数值积分思想,能有效克服测量噪声,无需迭代即可直接从微分方程辨识出模型参数,所建模型阶次较低、准确度较高,且较易实现递推算法,为传感器改善动态特性、实现动态补偿提供一种有效方法。大量实验和仿真结果验证了该方法的有效性。
关键词:传感器;动态建模;辨识;积分
中图分类号:T P212 文献标识码:A 文章编号:1000-9787(2004)01-0038-03
An identification method for sensors dynamic modeling
ZHANG Hua,CI Ying,XIE Zhi
(C oll of Info Sci and Engin,Northeastern University,Shenyang110004,China)
Abstract:A simple and very robust met hod is proposed for sensors dynamic modeling.Based on numerical inte gr als,the model parameters are estimated from the differential equation without iterations,the method is very effective in overcoming large amounts of measurement noise in the output.T he model s order built by this method is lower and the accuracy is hig her.A n effectiv e met hod is proposed for improving sensors dynamic char acter i stics and realizing sensors dynamic compensation.T he effectiveness of the identification method has been demonstrated throug h a number of simulations and tests.
Key words:sensor;dynamic modeling;identification;integrals
0 引 言
传感器的动态建模是研究其机理、评价其性能的有效手段,是改善动态特性、实现动态补偿的重要依据。目前常用的时域建模方法有[1]:系统辨识方法[2]、沃尔什变换方法[3]、最大熵谱法、自适应方法和神经元方法[4]等。其中,系统辨识建模法应用较广、发展较成熟;与之相比,沃尔什变换法所用数据较少,所建模型的阶数低,可直接得出微分方程的系数,减少转化误差,但不是递推算法,且对数据个数要求严格;最大熵谱法属时间序列分析建模方法,只需传感器动态标定中的输出数据,但它建模的准确度不高;在长序列建模中,自适应方法比最大熵谱法具有明显的优势;神经元方法虽然具有所建模型阶次低、准确度高的优点,但离现场实际应用还有一段距离。
本文在研究现有各种建模方法的基础上,借鉴线性连续时延过程阶跃响应辨识思想[5],提出了一
收稿日期:2003-08-18
*基金项目:国家自然科学基金资助项目(50174021)种基于数值积分的传感器动态建模方法,该方法先对所测数据进行积分,再用辨识方法进行建模,无需迭代计算即可直接得出微分方程的系数,减少转化误差;所建模型准确度较高、阶次较低,且较易实现递推算法,为传感器改善动态特性、实现动态补偿奠定基础;方法具有普遍适应性,可适用于任何输入信号,并推广至单调或振荡的最小相位系统及非最小相位系统的辨识建模。
1 基于数值积分的建模方法
对于属于线性时不变系统的传感器,可以用高阶常系数线性微分方程表述其动态特性为
a n
d n y(t)
d t n
+a n-1
d n-1y(t)
d t n-1
+a1
d y(t)
d t+y(t)= b m
d m u(t)
d t m
+b m-1
d m-1u(t)
d t m-1
++b1
d u(t)
d t
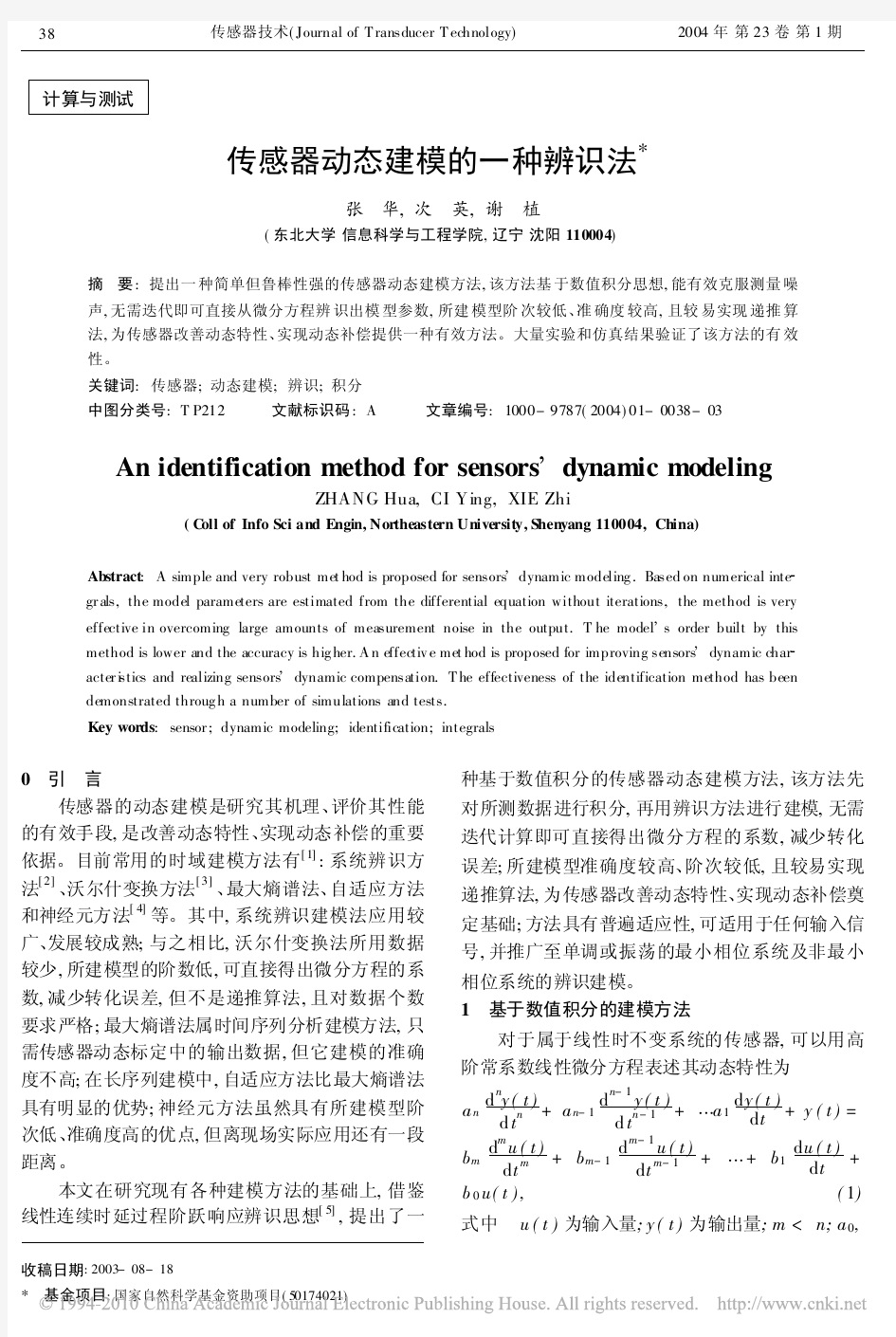
+ b0u(t),(1)式中 u(t)为输入量;y(t)为输出量;m 38 传感器技术(Journal of T ransducer T echnology) 2004年第23卷第1期 a n , b 0, ,b m 是系数,与传感器本身的工作原理、结构参数和使用条件等有关,是需要辨识的参数。 如传感器的初始条件为零,对式(1)进行拉普拉斯变换,并得传递函数为 G (s)=b m s m +b m -1s m-1+ +b 1s +b 0a n s n +a n-1s n-1 + +a 1s +1.(2) 定义 ! (n)[0,t ] f = !t 0! n ! 2 f ( 1)d 1 d n , 对式(1)两侧进行n 次积分得a n y (t)+a n-1 ! (1)[0,t ] y + +a 1 ! (n-1)[0,t] y + !(n) [0,t ]y =b m !(n-m)[0,t ] u +b m-1! (n-m+1)[0,t] u + + b 1 ! (n-1)[0,t] u +b 0 ! (n)[0,t ] u . (3) 选择t i ,i =1,2, ,N ;N ?n +m +1,则观测方程的矩阵形式为 Y = ,(4) 式中 Y =[ ! (n)[0,t 1] y , ! (n)[0,t 2] y , , ! (n)[0,t ] y ]T ; =[ (t 1), (t 2), , (t N )]T ; =[a n , ,a 1,b m , ,b 0]T ; (t i )= -y (t i ),-! (1)[0,t i ] y , ,-! (n-1)[0,t] y , ! (n-m )[0,t i ] u , , ! (n)[0,t i ] u .易见, T 非奇异,则由最小二乘法(LS )可得最佳估计值为 ^ =( T )-1 T Y . (5) 对于传感器而言,测量信号虽经滤波和积分处理,仍不可避免地存在测量噪声,假定噪声为零均值且平稳随机,则可采用辅助变量法(IV )代替最小二乘法。2 数值仿真 不失一般性,输入取单位阶跃信号,则 ! (n) [0,t i ]u =t n i n !.模型误差为 !=1N ?N i=1(y (t i )-y ^(t i ))2,(6)其中 y (t i ),y ^(t i )分别为实际值与模型计算值。 仿真实验取传递函数为G (s)= 0.3s 2 +1.1s +1.51.2s 4 +3.1s 3+7.5s 2+8.1s +1.6. 无噪声时辨识结果及误差计算如表1所示。 表1 无噪声阶跃信号不同阶次辨识结果 T ab 1 Identification results of step signal in noise free case 传递函数G (s )误差!0.95634.672s +13.0684#10-4 0.9358 1.643s 2+4.334s +17.8383#10-5 0.9396 0.5068s 3 +1.477s 2+4.391s +1 2.8625#10-5 -0.2765s +0.9387 0.2184s 2+4.084s +1 6.6782#10-5 -0.1786s +0.9392 0.1778s 3+0.6593s 2+4.196s +15.7089#10-5 0.7887s +0.9373 0. 7096s 4+ 1.529s 3+5.254s 2+5.197s +1 3.2041#10-5 0.07134s 2+0.6081s +0.9374 0.7339s 4+1.581s 3+4.483s 2+5.007s +1 2.8724#10-5 当模型阶次为二阶以上时,误差均较小,增加模型阶次对模型准确度提高影响很小,可见,所建模型准确度较高、阶次较低。 通常,传感器模型可近似为二阶线性系统,故本文仅以此为例分析其抗噪声能力。对上述传递函数施加不同信噪比R SN [5] 零均值正态分布的随机噪声,R SN =90%的仿真曲线如图1所示。 图1 阶跃信号(R S N =90%)辨识结果 Fig 1 Identification res ults of step signal(R S N =90%) 辨识结果见表2。 表2 不同信噪比R S N 阶跃信号辨识结果 Tab 2 Identification results of step s ignal under differtent R S N R SN (%) G (s ) !00.9358 1.643s 2+4.334s +17.8383#10-5 50.9328 1.67s 2+ 4.329s +1 0.0012100.9506 1.288s 2+4.492s +10.0048300.9866 1.318s 2+5.388s +10.0409501.004 0.155s 2 +5.506s +1 0.1167701.095 1.642s 2 +7.237s +1 0.248190 0.9475 20.3856 39第1期 张 华等:传感器动态建模的一种辨识法 从中可见,当R SN?10%时,!?0.0048,能很好满足一般应用场合需求,可见,该方法具有较好的鲁棒性。 图2和图3分别给出仿真输入为斜坡信号(R SN=50%)、正弦信号(R SN=50%)的辨识结果,可见建模方法对输入信号无特殊要求。 图2 斜坡信号(R SN =50%)辨识结果 Fig2 Identification resu lts of ramp signal(R S N =50%) 图3 正弦信号(R SN=90%)辨识结果 Fig3 Identification results of s in signal(R SN=90%) 3 温度传感器动态建模 3.1 动态标定实验 以黑体空腔式钢水连续测温传感器为研究对象,将其与中间包一起充分预热,则初始温度均匀且为中包预热温度T0,本实验中取0=1000%。当中间包内钢水液面上升,且达到稳定高度时,传感器突然插入,则传感器的动态响应可近似为阶跃响应。 3.2 建模结果 先对测量数据进行滤波、去均值、归一化等处理,再用积分辨识法对其进行阶次和参数辨识,结果如图4,表3所示。 图4 温度传感器动态辨识结果 Fig4 Dynamic identification results of temperature sensors 表3 温度传感器动态辨识结果 T ab3 Dynamic identification results of temperature sensors G(s)! 0.3644 2.687s+12.4836#10-4 0.3536 1.476s2+ 2.354s+1 4.7158#10-6 0.3546 0.1758s3+1.404s2+2.383s+1 2.8044#10-6 -0.04028s+0.3544 1.144s2+ 2.265s+12.6201#10 -6 0.06043s+0.3548 0.4393s3+1.798s2+2.559s+12.9070#10 -6 0.00578s2+0.01329s+0.3547 0.2893s3+1.499s2+2.425s+1 3.5271#10-6 0.02084s2+0.05566s+0.3547 0.09186s4+0.552s3+1.829s2+2.544s+1 3.8314#10-6 0.1134s2+0.0272s+0.3547 0.04951s+0.4462s+1.059s+1.90s+2.463s+12.1810#10 -6 -0.009032s3+0.08908s2+0.001332s+0.3547 0.2774s4+0.7668s3+1.658s2+2.39s+1 2.2707#10-6 -0.005769s3+0.1087s2+0.02231s+0.3547 0.02015s5+0.3908s4+0.9885s3+1.855s2+2.488s+1 2.0484#10-6 除一阶模型外,实测值与模型计算值吻合非常好;改变模型阶次对模型准确度影响较小,故所建模型阶次较低,易于实现在线动态补偿,且具有较好的鲁棒性。 4 结 论 由数字仿真和实验结果可见,本文所提出的传感器动态建模辨识方法具有以下优点: (1)动态建模结果与实验数据吻合较好,模型准确度高,阶次较低; (2)算法鲁棒性、稳定性较好; (3)算法程序简单实用,无需迭代计算即可直接得出微分方程的系数,减少转化误差; (4)易于形成递推算法,为传感器改善动态特性、实现动态补偿奠定基础; (5)方法具有普遍适应性,可推广至单调或振荡的最小相位系统及非最小相位系统的辨识建模。参考文献: [1] 徐科军.传感器动态特性的实用研究方法[M].合肥:中国科学 技术大学出版社,1999.28-62. [2] 马勒弟,雷 敏.薄膜热电偶的动态校准及辨识建模[J].仪器 仪表学报,1998,20(3):300-302. [3] 毕 海,孔德仁,朱明武.基于沃尔什函数的最小二乘动态建模 方法及应用[J].计量学报,1998,19(1):76-80. [4] 徐科军,殷 铭.基于FLANN的腕力传感器动态建模方法[J]. 仪器仪表学报,2000,21(1):92-94. [5] Wang Q G,Guo Xin,Zhang Yong.Direct identification of con tinuous time delay systems from step responses[J].Journal of Pro cess Control,2001,11:531-542. 作者简介: 张 华(1968-),女,辽宁沈阳人,讲师,1994年毕业于浙江大学,获硕士学位,现于东北大学信息科学与工程学院工作,主要从事传感器技术、检测技术与仪器等方面的研究。 40 传感器技术 第23卷 传感器的主要参数特性 传感器的种类繁多,测量参数、用途各异.共性能参数也各不相同。一般产品给出的性能参数主要是静态特性利动态特性。所谓静态特性,是指被测量不随时间变化或变化缓慢情况下,传感器输出值与输入值之间的犬系.一般用数学表达式、特性曲线或表格来表示。动态特性足反映传感器随时间变化的响应特性。红外碳硫仪动恋特性好的传感器,其输出量随时间变化的曲线与被测量随时间变化的曲线相近。一般产品只给出响应时间。 传感器的主要特性参数有: (1)测量范围(量程) 量程是指在正常工种:条件下传感器能够测星的被测量的总范同,通常为上限值与F 限位之差。如某温度传感器的测员范围为零下50度到+300度之间。则该传感器的量程为350摄氏度。 (2)灵敏度 传感器的灵敏度是指佑感器在稳态时输出量的变化量与输入量的变化量的比值。通常/d久表示。对于线性传感器,传感器的校准且线的斜率就是只敏度,是一个常量。而非线性传感器的灵敏度则随输入星的不同而变化,在实际应用巾.非线性传感器的灵敏度都是指输入量在一定范围内的近似值。传感器的足敏度越高.俏号处理就越简单。 (3)线性度(非线性误差) 在稳态条件下,传感器的实际输入、输出持件曲线勺理想直线之日的不吻合程度,称为线性度或非线性误差,通常用实际特性曲线与邵想直线之司的最大偏关凸h m2与满量程输出仪2M之比的百分数来表示。该系统的线性度X为 (4)不重复性 z;重复性是指在相同条件下。传感器的输人员技同——方向作全量程多次重复测量,输出曲线的不一致程度。通常用红外碳硫仪3次测量输11j的线之间的最大偏差丛m x与满量程输出值ym之比的百分数表示,1、2、3分别表示3次所得到的输出曲线.它是传感器总误差中的——项。 (5)滞后(迟滞误差) 迟滞现象是传感器正向特性曲线(输入量增大)和反向特性曲线(输入量减小)的不重合程度,通常用yH表示。 一、测量仪表的基本性能 1、精确度 (1)精密度δ 它表明仪表指示值的分散性,即对某一稳定的被测量,由同一个测量者,用同一个仪表,在相当短的时间内,连续重复测量多次,其测量结果(指示值)的分散程度。δ愈小,说明测量愈精密。 例如,某温度仪表的精密度δ=0.5℃,即表示多次测量结果的分散程度不大于0.5℃。精密度是随机误差大小的标志,精密度高,意味着随机误差小。 但是必须注意,精密度与准确度是两个概念,精密度高不一定准确。 (2)准确度ε 它表明仪表指示值与真值的偏离程度。 例如,某流量表的准确度ε=0.3m3/s,表示该仪表的指示值与真值偏离0.3m3/s。准确度是系统误差大小的标志,准确度高,意味着系统误差小。同样,准确度高不一定精密。(3)精确度τ 它是精密度与准确度的综合反映,精确度高,表示精密度和准确度都比较高。在最简单的情况下,可取两者的代数和,即τ=δ+ε。精确度常以测量误差的相对值表示。 2、稳定性 (1)稳定度 指在规定时间内,测量条件不变的情况下,由于仪表自身随机性变动、周期性变动、漂移等引起指示值的变化。一般以仪表精密度数值和时间长短一起表示。 例如,某仪表电压指示值每小时变化1.3V,则稳定性可表示为1.3mV/h。 (2)影响量 测量仪表由外界环境变化引起指示值变化的量,称为影响量。它是由温度、湿度、气压、振动、电源电压及电源频率等一些外界环境影响所引起的。说明影响量时,必须将影响因素与指示值偏差同时表示。 例如,某仪表由于电源电压发生变化10%而引起其指示值变化0.02mA,则应写成 0.02mA/U±10%。 二、传感器的分类和性能指标 1、传感器的分类 第3章传感器基本特性 一、单项选择题 1、衡量传感器静态特性的指标不包括()。 A. 线性度 B. 灵敏度 C. 频域响应 D. 重复性 2、下列指标属于衡量传感器动态特性的评价指标的是()。 A. 时域响应 B. 线性度 C. 零点漂移 D. 灵敏度 3、一阶传感器输出达到稳态值的50%所需的时间是()。 A. 延迟时间 B. 上升时间 C. 峰值时间 D. 响应时间 4、一阶传感器输出达到稳态值的90%所需的时间是()。 A. 延迟时间 B. 上升时间 C. 峰值时间 D. 响应时间 5、传感器的下列指标全部属于静态特性的是() A.线性度、灵敏度、阻尼系数 B.幅频特性、相频特性、稳态误差 C.迟滞、重复性、漂移 D.精度、时间常数、重复性 6、传感器的下列指标全部属于动态特性的是() A.迟滞、灵敏度、阻尼系数 B.幅频特性、相频特性 C.重复性、漂移 D.精度、时间常数、重复性 7、不属于传感器静态特性指标的是() A.重复性 B.固有频率 C.灵敏度 D.漂移 8、对于传感器的动态特性,下面哪种说法不正确() A.变面积式的电容传感器可看作零阶系统 B.一阶传感器的截止频率是时间常数的倒数 C.时间常数越大,一阶传感器的频率响应越好 D.提高二阶传感器的固有频率,可减小动态误差和扩大频率响应范围9、属于传感器动态特性指标的是() A.重复性 B.固有频率 C.灵敏度 D.漂移 10、无论二阶系统的阻尼比如何变化,当它受到的激振力频率等于系统固有频率时,该系统的位移与激振力之间的相位差必为() A. 0° B.90° C.180° D. 在0°和90°之间反复变化的值 11、传感器的精度表征了给出值与( )相符合的程度。 A.估计值 B.被测值 C.相对值 D.理论值 12、传感器的静态特性,是指当传感器输入、输出不随( )变化时,其输出-输入的特性。 A.时间 B.被测量 C.环境 D.地理位置 13、非线性度是测量装置的输出和输入是否保持( )关系的一种度量。 A.相等 B.相似 C.理想比例 D.近似比例 14、回程误差表明的是在( )期间输出-输入特性曲线不重合的程度。 A.多次测量 B.同次测量 C.正反行程 D.不同测量 =秒的一阶系统,当受到突变温度作用后,传感器输15、已知某温度传感器为时间常数τ3 出指示温差的三分之一所需的时间为()秒 A.3 B.1 C. 1.2 D.1/3 二、多项选择题 1.阶跃输入时表征传感器动态特性的指标有哪些?() A.上升时间 B.响应时间 C.超调量 D.重复性 2.动态响应可以采取多种方法来描述,以下属于用来描述动态响应的方法是:() A.精度测试法 B.频率响应函数 C.传递函数 D.脉冲响应函数 3. 传感器静态特性包括许多因素,以下属于静态特性因素的有()。 A.迟滞 B.重复性 C.线性度 D.灵敏度 4. 传感器静态特性指标表征的重要指标有:() A.灵敏度 B.非线性度 C.回程误差 D.重复性 5.一般而言,传感器的线性度并不是很理想,这就要求使用一定的线性化方法,以下属于线性化方法的有:() A.端点线性 B.独立线性 C.自然样条插值 D.最小二乘线性 三、填空题 1、灵敏度是传感器在稳态下对的比值。 2、系统灵敏度越,就越容易受到外界干扰的影响,系统的稳定性就越。 3、是指传感器在输入量不变的情况下,输出量随时间变化的现象。 4、要实现不失真测量,检测系统的幅频特性应为,相频特性应为。 传感器动态特性的性能指标 在检测控制系统和科学实验中,需要对各种参数进行检测和控制,而要达到比较优良的控制性能,则必须要求传感器能够感测被测量的变化并且不失真地将其转换为相应的电量,这种要求主要取决于传感器的基本特性。传感器的基本特性主要分为静态特性和动态特性,下面介绍反映传感器动态特性的性能指标。 动态特性是指检测系统的输入为随时间变化的信号时,系统的输出与输入之间的关系。主要动态特性的性能指标有时域单位阶跃响应性能指标和频域频率特性性能指标。传感器的输入信号是随时间变化的动态信号,这时就要求传感器能时刻精确地跟踪输入信号,按照输入信号的变化规律输出信号。当传感器输入信号的变化缓慢时,是容易跟踪的,但随着输入信号的变化加快,传感器随动跟踪性能会逐渐下降。输入信号变化时,引起输出信号也随时间变化,这个过程称为响应。动态特性就是指传感器对于随时间变化的输入信号的响应特性,通常要求传感器不仅能精确地显示被测量的大小,而且还能复现被测量随时间变化的规律,这也是传感器的重要特性之一。 传感器的动态特性与其输入信号的变化形式密切相关,在研究传感器动态特性时,通常是根据不同输入信号的变化规律来考察传感器响应的。实际传感器输入信号随时间变化的形式可能是多种多样的,最常见、最典型的输入信号是阶跃信号和正弦信号。这两种信号在物理上较容易实现,而且也便于求解。 对于阶跃输入信号,传感器的响应称为阶跃响应或瞬态响应,它是指传感器在瞬变的非周期信号作用下的响应特性。这对传感器来说是一种最严峻的状态,如传感器能复现这种信号,那么就能很容易地复现其他种类的输入信号,其动态性能指标也必定会令人满意。 而对于正弦输入信号,则称为频率响应或稳态响应。它是指传感器在振幅稳定不变的正弦信号作用下的响应特性。稳态响应的重要性,在于工程上所遇到的各种非电信号的变化曲线都可以展开成傅里叶(Fourier)级数或进行傅里叶变换,即可以用一系列正弦曲线的叠加来表 课程设计说明书 题目磁电式传感器动态特性分析及信号调理电路的仿真设计 机械工程学院 机械设计制造及其自动化专业0901班0215号 学生姓名刘朗. 指导教师陈小异、伍新. 完成日期 2012年7月6日. 湖南工程学院机械工程学院 目录 第1章绪论 (4) 1.1磁电式传感器的工作原理 (4) 1.2磁电式传感器的特点 (4) 1.3信号调理电路 (4) 第2章磁电式传感器动态特性分析 (5) 2.1绝对式速度传感器结构分析 (5) 2.2建立物理模型 (5) 2.3建立等效数学模型 (6) 2.4建立仿真模型 (7) 2.5动态特性分析 (9) 第3章信号调理电路的仿真设计 (10) 3.1信号调理电路的原理 (10) 3.2信号调理的目的 (10) 3.3放大调制解调滤波的作用和工作原理 (10) 3.4基于simulink建立调理电路 (11) 心得体会 (15) 参考文献 (16) 湖南工程学院 课程设计(论文)任务书 设计题目:磁电式传感器动态特性分析及信号调理电路的仿真设计 姓名系别机械工程专业机械设计制造及自动化班级学号 指导老师陈小异伍新教研室主任 一、基本任务及要求: 磁电式传感器是机械工程测试领域内常用的传感器之一,了解其动态特性对于该传感器的正确使用、合理选用具有非常重要的意义;信号调理电路也是测试系统的重要组成部分,也是检测系统设计的内容之一;本课题借助于MatLab软件进行传感器动态特性分析及调理电路的仿真设计。具体设计任务如下: 1、熟悉磁电式传感器的结构、进行传感器系统建模; 2、利用MatLab软件进行传感器二次建模(仿真模型的建立); 3、根据仿真模型,进行频域分析,确定其传感器的动态特性; 4、掌握信号调理电路(放大、调制解调、滤波)的作用及工作原理,在此基础上进行基于Simulink的调理电路的仿真设计; 5、撰写设计计算说明书(5000字以上),含建模、分析过程及电路的设计。 二、进度安排及完成时间: 1、下达设计任务,收集并查阅相关资料,熟悉课题 1天 2、对磁电式速度传感器(绝对型、相对型均可)结构进行分析、进行物理模型的构建并在此基础上进行其数学模型的建立 2.5天 3、基于MatLab的仿真模型的建立(编程)、动态特性分析 1.5 天 4、基于Simulink的调理电路的设计 2天 5、撰写设计计算说明书、存储介质制作 1天 6、答辩 1天 动态电路分析 一、开关型: 1、在如图1所示的电路中,将开关K闭合,则电流表的示数将______,电压表的示数将________(均填“变大”、“变小”或“不变”)。 2、在如图2所示的电路中,当开关K断开时,电阻R1与R2是________联连接的。开关K闭合时,电压表的示数将________(选填“变小”、“不变”或“变大”)。 3、在图3中,灯泡L1和灯泡L2是______联连接的。当开关K断开时,电压表的示数将________;电流表的示数将__________(选填“增大”、“不变”或“减小”)。 二、滑动变阻器型: 1.如图1所示的电路,电源电压不变,闭合开关S, 将滑动变阻器的滑片P 向左移动的过程中,下列说法正确的是(假设灯丝的电阻不变)( ) A.电压表的示数变小 B.电流表的示数变小 C.电压表和电流表示数的比值变小 D.电压表和电流表示数都变大 1题图2题图3题图 2.如图所示电路,电源电压保持不变.闭合开关S,缓慢移动滑动变阻器的滑片P,电流表A1的示数逐渐变小,这一过程中( ) A.滑片P是向左滑动的 B.电压表V的示数逐渐变小 C.电流表A的示数逐渐变小 D.电流表A与A1的示数差逐渐变小 3.如图所示,电源电压保持不变。闭合开关,当滑动变阻器的滑片向右移动时 ( ) A.电流表示数变大 B.电压表示数变小 C.小灯泡亮度不变 D.电压表示数不变 图 2 图 1 图3 4.(09.山西)如图所示电路中,电源电压不变,闭合开关S ,滑动变阻器的滑片P 向左移动时( ) A .电流表示数变大,电压表示数变大 B .电流表示数变小,电压表示数变小 C .电流表示数变大,电压表示数变小 D .电流表示数变小,电压表示数变大 5.在图所示电路中,闭合开关S 后,在滑片P 向右滑动过程中,各电表示数变化正确的是( ) A .A 1、A 3示数不变,A 2、V 示数变小 B .A 1、V 示数不变,A 2、A 3示数变大 C .A 1、A 2、V 示数不变,A 3示数变小 D .A 2、V 示数不变,A 1示数变小,A 3示数变大 三、应用型: 1.如图是气体酒精浓度测试仪原理图,用于现场测试司机是否酒后驾车。电源电压保持不变,R 为定值电阻,R ′为二氧化锡半导体型酒精气体传感器,其阻值随气体酒精浓度的增大渐减小.若某次测试中电流表示数较大,则说明( ) A .气体的酒精浓度较大,R ′阻值较小 B .气体的酒精浓度较大,R ′阻值较大 C .气体的酒精浓度较小,R ′阻值较小 D .气体的酒精浓度较小,R ′阻值较大 1题图 2题图 3题图 2.二氧化锡传感器能用于汽车尾气中一氧化碳浓度的检测,它的原理是其中的电阻随一氧化碳浓度的增大而减小。 将二氧化锡传感器接入如图所示的电路中,则当二氧化锡传感器所处空间中的一氧化碳浓度增大时,电压表示数U 与电流表示数I 发生变化,其中正确的是( ) A .U 变大,I 变大 B .U 变小,I 变小 C .U 变小,I 变大 D .U 变大,I 变小 3、(12.娄底)高速公路收费站于开始对过往的超载货车实施计重收费,某同学结合所学物理知识设计了如图所示的计重秤原理图,以下说法正确的是( ) A .称重表相当于一个电压表 B .电路中的R1是没有作用的 C .当车辆越重时,称重表的示数越小 D .当车辆越重时,称重表的示数越大 4题图 5题图 手指康复机器人控制系统的设计与实现 4.1硬件电路总体结构 手指康复系统的硬件电路采用模块化设计。采用模块化设计,可以大大简化设计的过程, 化整为零,将复杂的电路分解为可重复利用的模块,对各个模块进行独立的测试,提高设计 电路的质量。除此之外,我们不仅可以对模块直接进行利用,也可以方便的对各个模块部分 进行修改。电路的模块化设计,如今已经广泛的应用于我们的硬件电路的设计中去了,同时 模块化设计也在复杂的PCB的并行设计领域发挥着良好的作用。 根据各个模块的功能作用的不同,手指康复机器人硬件电路可分为传感器数据采集模块。驱动控制电路模块,电源管理模块,主控制器模块,通信及调试接口模块,AD转换模 块,总体的结构图如下。 驱动控制模块 直流电机驱动块 磁流变液阻尼器 驱动块 (1)传感器数据采集模块 传感器数据采集模块主要有力矩传感器调理电路和光电编码器辨向电路组成。这两个电路的主要功能就是将机械结构中输出轴上的模拟力矩信号和位置信号转换为数字信号,便于微处理器进行相应处理。 为了保证驱动执行机构可以向手指施加大小合适的反馈力,需要通过力矩传感器来测出 与手指相连接的输出杆上的力矩,从而计算手指的拉压力。已有的机械结构中,采用的电阻 应变式力矩传感器,这种传感器主要基于电阻应变效应,其由弹性元件、粘贴在弹性元件上 的应变片及外壳组成,当弹性敏感元件受到外力作用后,敏感元件发生形变,形变传递给粘 贴在弹性敏感元件上的应变片,应变片相应的发生形变,这导致应变片的电阻阻值大小发生 变化,在电桥电路中,电桥失去平衡从而输出相应的电量,电量的大小相应的反映出被测量 的大小。电阻应变式传感器的灵敏度高,稳定性好,在自动检测和控制技术领域有着广泛的 应用。在手指康复机器人系统中,力矩传感器输出的电量信号比较微弱,易衰减且容易受到 传感器型动态电路专题 1.(2019威海,20)图甲是某新型电饭锅的简化电路图。R0为15Ω的定值电阻,其阻值不受温度影响。R T是热敏电阻,其阻值随温度的变化规律如图乙所示。由图象可知,当R T的温度从30℃升高到130℃的过程中,电路总功率的变化规律是:;当R T的温度达到100℃时,R T的功率为W。 2.(2019海南,9)如图所示是某电子秤内部简化电路。R x是压敏电阻,阻值随压力增大而减小,电源电压保持不变。闭合开关,当R x上压力增大时,随之减小的是() A. 通过R x的电流 B. 通过R0的电流 C. R x两端的电压 D. R0两端的电压 3.(2019淄博,12)新型PTC发热材料可以自动调节电路的电功率,在生活中广泛应用,图甲是PTC调试工作电路,R0是保护电阻,阻值恒定;R1是PTC电阻,阻值随温度变化的图像如图乙所示。闭合开关S,当温度从20°C升高到120°C的过程中 A. 电流表示数先变小后变大 B. 电压表示数先变大后变小 C. 电压表与电流表示数的比值先变小后变大 D. 保护电阻消耗的功率先变小后变大 4.(2019北部湾,14)用石墨烯制成的湿敏电阻,其阻值会随含水量的升高而增大。图5是检测植物叶片含水量的电路,电源电压不变。将湿敏电阻R附着在叶片上,当叶片含水量升高时() A.电流表示数增大 B.电压表示数减小 C.电路总电阻减小 D.电路总功率增大 5.(2019泸州,12)如图为一种测量环境湿度仪器的简化工作原理图。电源电压恒为6V,定值电阻R为l5Ω,R0为湿敏电阻,其阻值随环境湿度的增加而减小,阻值范围为10Ω~20Ω,电压表量程为0~3V,电流表量程为0~0.6A.闭合开关S,当环境的湿度增加时,在保证两电表安全的情况下,下列说法中正确的是() A. 电流表示数变大,R0两端的电压变大 B. 电压表示数与电流表示数的比值不变 C. 通过R0的最大电流为0.24A D. R0在电路中的最小电阻值为15Ω 6.(2019凉山州,11)法国科学家阿尔贝?费尔和德国科学家彼得?格林贝格尔由于发现了巨磁电阻(GMR)效应,荣获了2007年诺贝尔物理学奖。巨磁电阻效应是指某些材料的电阻在磁场的磁性增强时急剧减小的现象,如图所示,GMR是巨磁电阻,闭合S1、S2并使滑片P 向左滑动,则() 传感器信号调理电路 传感器信号调理电路 信号调理往往是把来自传感器的模拟信号变换为用于数据采集、控制过程、执行计算显示读出和其他目的的数字信号。模拟传感器可测量很多物理量,如温度、压力、力、流量、运动、位置、PH、光强等。通常,传感器信号不能直接转换为数字数据,这是因为传感器输出是相当小的电压、电流或电阻变化,因此,在变换为数字数据之前必须进行调理。调理就是放大,缓冲或定标模拟信号,使其适合于模/数转换器(ADC)的输入。然后,ADC对模拟信号进行数字化,并把数字信号送到微控制器或其他数字器件,以便用于系统的数据处理。此链路工作的关键是选择运放,运放要正确地接口被测的各种类型传感器。然后,设计人员必须选择ADC。ADC应具有处理来自输入电路信号的能力,并能产生满足数据采集系统分辨率、精度和取样率的数字输出。 传感器 传感器根据所测物理量的类型可分类为:测量温度的热电偶、电阻温度检测器(RTD)、热敏电阻;测量压力或力的应变片;测量溶液酸碱值的PH电极;用于光电子测量光强的PIN光电二极管等等。传感器可进一步分类为有源或无源。有源传感器需要一个外部激励源(电压或电流源),而无源传感器不用激励而产生自己本身的电压。通常的有源传感器是RTD、热敏电阻、应变片,而热电偶和PIN二极管是无源传感器。为了确定与传感器接口的放大器所必须具备的性能指标,设计人员必须考虑传感器如下的主要性能指标: ·源阻抗 ——高的源阻抗大于100KΩ ——低的源阻抗小于100Ω ·输出信号电平 ——高信号电平大于500mV满标 ——低信号电平大于100mV满标 ·动态范围 在传感器的激励范围产生一个可测量的输出信号。它取决于所用传感器类型。 放大器功用 放大器除提供dc信号增益外,还缓冲和定标送到ADC之前的传感器输入。放大器有两个关键职责。一个是根据传感器特性为传感器提供合适的接口。另一个职责是根据所呈现的负载接口ADC。关键因素包括放大器和ADC之间的连接距离,电容负载效应和ADC的输入阻抗。 选择放大器与传感器正确接口时,设计人员必须使放大器与传感器特性匹配。可靠的放大器特性对于传感器——放大器组合的工作是关键性的。例如,PH电极是一个高阻抗传感器,所以,放大器的输入偏置电流是优先考虑的。PH传感器所提供的信号不允许产生任何相当大的电流,所以,放大器必须是在工作时不需要高输入偏置电流的型号。具有低输入偏置电流的高阻抗MOS输入放大器是符合这种要求的最好选择。另外,对于应用增益带宽乘积(GBP)是低优先考虑,这是因为传感器工作在低频,而放大器的频率响应不应该妨碍传感器信号波形的真正再生。 传感器的动态特性 所谓动态特性,是指传感器在输入变化时,它的输出的特性。在实际工作中,传感器的动态特性常用它对某些标准输入信号的响应来表示。这是因为传感器对标准输入信号的响应容易用实验方法求得,并且它对标准输入信号的响应与它对任意输入信号的响应之间存在一定的关系,往往知道了前者就能推定后者。最常用的标准输入信号有阶跃信号和正弦信号两种,所以传感器的动态特性也常用阶跃响应和频率响应来表示。 db(decibel,分贝)是一个纯计数单位,本意是表示两个量的比值大小,没有单位 对于功率,db=10*lg(a/b)。对于电压或电流,db=20*lg(a/b)。 -3=10*lg(x) x=0.5(8-20hz) 刹那是指一个心念起动的极短时间即为一“念”,20念为一瞬,20瞬为一弹指,20弹指为一罗预,20罗预为一须臾,30须臾为一昼夜,如此算来,一刹那就是0.018秒。 传感器的静态特性 传感器的静态特性是指对静态的输入信号,传感器的输出量与输入量之间所具有相互关系。因为这时输入量和输出量都和时间无关,所以它们之间的关系,即传感器的静态特性可用一个不含时间变量的代数方程,或以输入量作横坐标,把与其对应的输出量作纵坐标而画出的特性曲线来描述。表征传感器静态特性的主要参数有:线性度、灵敏度、分辨力和迟滞等。 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解图尔克、奥托尼克斯、科瑞、山武、倍加福、邦纳、亚德客、施克等各类传感器的选型,报价,采购,参数,图片,批发信息,请关注艾驰商城https://www.360docs.net/doc/01432707.html,/ 传感器静态特性的一般知识 传感器作为感受被测量信息的器件,总是希望它能按照一定的规律输出有用信号,因此需要研究其输出――输入的关系及特性,以便用理论指导其设计、制造、校准与使用。理论和技术上表征输出――输入之间的关系通常是以建立数学模型来体现,这也是研究科学问题的基本出发点。由于传感器可能用来检测静态量(即输入量是不随时间变化的常量)、准静态量或动态量(即输入量是随时间而变化的量),理论上应该用带随机变量的非线性微分方程作为数学模型,但这将在数学上造成困难。由于输入信号的状态不同,传感器所表现出来的输出特性也不同,所以实际上,传感器的静、动态特性可以分开来研究。因此,对应于不同性质的输入信号,传感器的数学模型常有动态与静态之分。由于不同性质的传感器有不同的在参数关系(即有不同的数学模型),它们的静、动态特性也表现出不同的特点。在理论上,为了研究各种传感器的共性,本节根据数学理论提出传感器的静、动态两个数学模型的一般式,然后,根据各种传感器的不同特性再作以具体条件的简化后给予分别讨论。应该指出的是,一个高性能的传感器必须具备有良好的静态和动态特性,这样才能完成无失真的转换。 1. 传感器静态特性的方程表示方法 静态数学模型是指在静态信号作用下(即输入量对时间t 的各阶导数等于零)得到的数学模型。传感器的静态特性是指传感器在静态工作条件下的输入输出特性。所谓静态工作条件是指传感器的输入量恒定或缓慢变化而输出量也达到相应的稳定值的工作状态,这时,输出量为输入量的确定函数。若在不考虑滞后、蠕变的条件下,或者传感器虽然有迟滞及蠕变等但仅考虑其理想的平均特性时,传感器的静态模型的一般式在数学理论上可用n 次方代数方程式来表示,即 2n 012n y a a x a x a x =+++?+ (1-2) 式中 x ――为传感器的输入量,即被测量; y ――为传感器的输出量,即测量值; 0a ――为零位输出; 1a ――为传感器线性灵敏度; 2a ,3a ,…,n a ――为非线性项的待定常数。 0a ,1a ,2a ,3a ,…,n a ――决定了特性曲线的形状和位置,一般通过传感器的校 准试验数据经曲线拟合求出,它们可正可负。 传感器应用电路设计 电子温度计 学校:贵州航天职业技术学院 班级:2011级应用电子技术 指导老师: 姓名: 组员: 摘要 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。 本文将介绍一种基于单片机控制的数字温度计。在件方面介绍单片机温度控制系统的设计,对硬件原理图做简洁的描述。系统程序主要包括主程序、读出温度子程序、温度转换命令子程序、计算温度子程序、显示数据刷新子程序。软硬件分别调试完成以后,将程序下载入单片机中,电路板接上电源,电源指示灯亮,按下开关按钮,数码管显示当前温度。由于采用了智能温度传感器DS18B20,所以本文所介绍的数字温度计与传统的温度计相比它的转换速率极快,进行读、写操作非常简便。它具有数字化输出,可测量远距离的点温度。系统具有微型化、微功耗、测量精度高、功能强大等特点,加之DS18B20内部的差错检验,所以它的抗干扰能力强,性能可靠,结构简单。 随着科技的不断发展,现代社会对各种信息参数的准确度和精确度的要求都有了几何级的增长,而如何准确而又迅速的获得这些参数就需要受制于现代信息基础的发展水平。在三大信息信息采集(即传感器技术)、信息传输(通信技术)和信息处理(计算机技术)中,传感器属于信息技术的前沿尖端产品,尤其是温度传感器技术,在我国各领域已经引用的非常广泛,可以说是渗透到社会的每一个领域,人民的生活与环境的温度息息相关,在工业生产过程中需要实时测量温度,在农业生产中也离不开温度的测量,因此研究温度的测量方法和装置具有重要的意义。 测量温度的关键是温度传感器,温度传感器的发展经历了三个发展阶段:①传统的分立式温度传感器②模拟集成温度传感器③智能集成温度传感器。 目前的智能温度传感器(亦称数字温度传器)是在20世纪90年代中期问世的,它是微电子技术、计算机技术和自动测试技术(ATE)的结晶,特点是能输出温度数据及相关的温度控制量,适配各种微控制器(MCU)。社会的发展使人们对 一、传感器地特性 ()传感器地动态性.动特性是指传感器对随时间变化地输入量地响应特性.动态特性输入 信号变化时,输出信号随时间变化而相应地变化,这个过程称为响应.传感器地动态特性是 指传感器对随时间变化地输入量地响应特性.动态特性好地传感器,当输入信号是随时间变 化地动态信号时,传感器能及时精确地跟踪输入信号,按照输入信号地变化规律输出信号. 当传感器输入信号地变化缓慢时,是容易跟踪地,但随着输入信号地变化加快,传感器地及时跟踪性能会逐渐下降.通常要求传感器不仅能精确地显示被测量地大小,而且还能复现被测量随时间变化地规律,这也是传感器地重要特性之一.文档来自于网络搜索 ()传感器地线性度.通常情况下,传感器地实际静态特性输出是条曲线而非直线.在实际 工作中,为使仪表具有均匀刻度地读数,常用一条拟合直线近似地代表实际地特性曲线、线性度(非线性误差)就是这个近似程度地一个性能指标.拟合直线地选取有多种方法.如将零输 入和满量程输出点相连地理论直线作为拟合直线;或将与特性曲线上各点偏差地平方和为最小地理论直线作为拟合直线,此拟合直线称为最小二乘法拟合直线.文档来自于网络搜索 ()传感器地灵敏度.灵敏度是指传感器在稳态工作情况下输出量变化△ 对输入量变化△ 地比值.它是输出一输入特性曲线地斜率.如果传感器地输出和输入之间显线性关系,则灵敏度是一个常数.否则,它将随输入量地变化而变化.灵敏度地量纲是输出、输入量地量纲之比.例如,某位移传感器,在位移变化时,输出电压变化为,则其灵敏度应表示为.当传感器地输 出、输入量地量纲相同时,灵敏度可理解为放大倍数.文档来自于网络搜索 ()传感器地稳定性.稳定性表示传感器在一个较长地时间内保持其性能参数地能力.理想地情况是不论什么时候,传感器地特性参数都不随时间变化.但实际上,随着时间地推移, 大多数传感器地特性会发生改变.这是因为敏感器件或构成传感器地部件,其特性会随时间发生变化,从而影响传感器地稳定性.文档来自于网络搜索 ()传感器地分辨力.分辨力是指传感器可能感受到地被测量地最小变化地能力.也就是说,如果输入量从某一非零值缓慢地变化.当输入变化值未超过某一数值时,传感器地输出 不会发生变化,即传感器对此输入量地变化是分辨不出来地.只有当输入量地变化超过分辨 力时,其输出才会发生变化.通常传感器在满量程范围内各点地分辨力并不相同,因此常用满量程中能使输出量产生阶跃变化地输入量中地最大变化值作为衡量分辨力地指标.上述指 标若用满量程地百分比表示,则称为分辨率.文档来自于网络搜索 ()传感器地迟滞性.迟滞特性表征传感器在正向(输入量增大)和反向(输入量减小)行程间输出输入特性曲线不一致地程度,通常用这两条曲线之间地最大差值△与满量程输出地百 分比表示.迟滞可由传感器内部元件存在能量地吸收造成.文档来自于网络搜索 ()传感器地重复性.重复性是指传感器在输入量按同一方向作全量程连续多次变动时所得特性曲线不一致地程度.各条特性曲线越靠近,说明重复性越好,随机误差就越小.如图所 示为输出特性曲线地重复特性,正行程地最大重复性偏差为.反行程地最大重复性偏差为.取 这两个最大偏差中地较大者为,再以其占满量程输出地百分数表示,就是重复误差,即一士X ()重复性是反映传感器精密程度地重要指标.同时,重复性地好坏也与许多随机因素有关,它 属于随机误差,要用统计规律来确定.文档来自于网络搜索 二、常见地传感器种类 .电阻式传感器电阻式传感器是将被测量,如位移、形变、力、加速度、湿度、温度等这些物理量转换式成电阻值这样地一种器件.主要有电阻应变式、压阻式、热电阻、热敏、气敏、湿敏等电阻式传感器件.文档来自于网络搜索 .变频功率传感器 变频功率传感器通过对输入地电压、电流信号进行交流采样,再将采样值通过电缆、光 2019 年中考物理真题分类汇编——传感器型动态电路专题 1.(2019 威海,20)图甲是某新型电饭锅的简化电路图。R0为15Ω的定值电阻,其阻值不受温度影响。R T是热敏电阻,其阻值随温度的变化规律如图乙所示。由图象可知,当 R T的温度从30℃升高到130℃的过程中,电路总功率的变化规律是:;当 R T的温度达到100℃时,R T的功率为W。 2.(2019 海南,9)如图所示是某电子秤内部简化电路。R x是压敏电阻,阻值随压力增大而减小,电源电压保持不变。闭合开关,当R x上压力增大时,随之减小的是() A. 通过R x的电流 B. 通过R0的电流 C. R x两端的电压 D. R0两端的电压 3.(2019 淄博,12)新型 PTC 发热材料可以自动调节电路的电功率,在生活中广泛应用,图甲是 PTC 调试工作电路,R0是保护电阻,阻值恒定;R1是 PTC 电阻,阻值随温度变化的图像如图乙所示。闭合开关 S,当温度从20°C升高到120°C的过程中 A.电流表示数先变小后变大 B.电压表示数先变大后变小 C.电压表与电流表示数的比值先变小后变大 D.保护电阻消耗的功率先变小后变大 4.(2019 北部湾,14)用石墨烯制成的湿敏电阻,其阻值会随含水量的升高而增大。图5 是检测植物叶片含水量的电路,电源电压不变。将湿敏电阻R 附着在叶片上,当叶片含水量升高时() A.电流表示数增大B.电压表示数减小 C.电路总电阻减小D.电路总功率增大 5.(2019 泸州,12)如图为一种测量环境湿度仪器的简化工作原理图。电源电压恒为 6V,定值电阻R为l5Ω,R0为湿敏电阻,其阻值随环境湿度的增加而减小,阻值范围为10Ω~20Ω,电压表量程为0~3V,电流表量程为0~0.6A.闭合开关S,当环境的湿度增加时,在保证两电表安全的情况下,下列说法中正确的是() A.电流表示数变大,R0 两端的电压变大 B.电压表示数与电流表示数的比值不变 C.通过 R0 的最大电流为 0.24A D.R0 在电路中的最小电阻值为15Ω 6.(2019 凉山州,11)法国科学家阿尔贝?费尔和德国科学家彼得?格林贝格尔由于发现了巨磁电阻(GMR)效应,荣获了2007 年诺贝尔物理学奖。巨磁电阻效应是指某些材料的电阻在磁场的磁性增强时急剧减小的现象,如图所示,GMR 是巨磁电阻,闭合 S1、S2并使滑片P 向左滑动,则() 重庆大学本科学生毕业设计(论文)传感器及电源通用控制器的设计 学生:赵磊 学号:20073079 指导教师:尹爱军 专业:机械电子工程 重庆大学机械工程学院 二O一一年六月 Graduation Design(Thesis) of Chongqing University Design of Senor and Source General Controller Undergraduate: Zhao Lei Supervisor: Prof. Yin Aijun Major: Mechanical-electronic Engineering College of Mechanical Engineering Chongqing University June 2011 摘要 测试技术与测试仪器是获取信息、分析和处理测量数据的关键技术和手段,是从事科学研究、产品质量分析检验与控制不可获取的工具。机械科学里测试也是很重要的一个研究分支,机械里面的测试有机械的振动、噪声等测试,其中机械振动的测试及工程上很重要的一部分,随着生产的发展和科学理论技术的水平的提高,现代的振动测试过采用电测法,但是在机械行业里面机械式的测振法仍然是以振动传感器为理论基础的。 现在工程测试中广泛采用的机械量的电测原理和技术,也就是首先使用各种转换装置——传感器来将不同信号的物理特征转为具有物理特性的电信号。所以传感器在机械测试中是占有很重要的地位的。要做好机械测试这一块的工作,我得做好测试整个过程中的每一步。而传感器要很好的工作它肯定是需要完善的调理电路。而在机械的测试技术中常用到得就是两种传感器,普通的压电式加速度传感器和ICP加速度传感器,两者的应用都很广泛,在现代的机械测试中都应用的很多。本文将为读者介绍两种传感器的结构,在测试中的应用,以及两种传感器使用的差别。两种传感器之间又由于内部有小的细微差别使他们在测试的时候拥有不同的测试通道,这样我们的测试仪器上就需要给两种传感器配备不同的通道口,是仪器显得繁重而且给测试工作带来烦恼,在本文中将以简化测试人员的工作,简化测试仪器的为目的设计一个传感器自动识别及调理电路来实现传感器通道口的共用问题,同时也解决ICP传感器的恒流源供电。于此同时对于所设计的电路我们也需要为其设计一个专门的电源管理模块来实现的智能的电源管理。 本电路系统结构简单,应用可靠,采用简单常用的电路实现。可以完成传感器的自动识别,完成传感器的调理,实现信号的准确采集。 关键词:压电式加速度传感器电荷前置放大器传感器自动识别 恒流源电路电池的智能管理 传感器简答 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998 1、什么是传感器的静态特性它有哪些性能指标 如何用公式表征这些性能指标 2、什么是传感器的动态特性 其分析方法有哪几种 3、什么是传感器的静特性主要指标有哪些有何实际意义 4、什么是传感器的基本特性传感器的基本特性主要包括哪两大类解释其定义并分别列出描述这两大特性的主要指标。(要求每种特性至少列出2种常用指标) 1、 答:传感器的静态特性是它在稳态信号作用下的输入-输出关系。静态特性所描述的传感器的输入、输出关系式中不含有时间变量。 传感器的静态特性的性能指标主要有: ① 线性度:非线性误差 max L FS L 100%Y γ?=± ? ② 灵敏度:y n x d S = d ③ 迟滞:max H FS H 100%Y γ?=? ④ 重复性:max R FS R 100%Y γ ?=± ? ⑤ 漂移:传感器在输入量不变的情况下,输出量随时间变化的现象。 2、答:传感器的动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性。 传感器的动态特性可以从时域和频域两个方面分别采用瞬态响应法和频率响应法来分析。 知识点:传感器的动态特性 3、答:传感器的静态特性是当其输入量为常数或变化极慢时,传感器的输入输出特性,其主要指标有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。传感器的静特性由静特性曲线反映出来,静特性曲线由实际测绘中获得。通常人们根据传感器的静特性来选择合适的传感器。 知识点:传感器的静态特性 4、答:传感器的基本特性是指传感器的输入-输出关系特性。 传感器的基本特性主要包括静态特性和动态特性。其中,静态特性是指传感器在稳态信号作用下的输入-输出关系,描述指标 有:线性度(非线性误差)、灵敏度、迟滞、重复性和漂移;动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性,主要描述指标有:时间常数、延迟时间、上升时间、峰值时间、响应时间、超调量、幅频特性和相频特性。 1、什么叫应变效应 利用应变效应解释金属电阻应变片的工作原理。 2、试简要说明电阻应变式传感器的温度误差产生的原因,并说明有哪几种补偿方法。 1、 答:材料的电阻变化由尺寸变化引起的,称为应变效应。 应变式传感器的基本工作原理:当被测物理量作用在弹性元件上,弹性元件在力、力矩或压力等的作用下发生形变,变换成相应的应变或位移,然后传递给与之相连的应变片,将引起应变敏感元件的电阻值发生变化,通过转换电路变成电量输出。输出的电量大小反映了被测物理量的大小。 2、答: 温度误差产生原因包括两方面: 温度变化引起应变片敏感栅电阻变化而产生附加应变,试件材料与敏感栅材料的线膨胀系数不同,使应变片产生附加应变。 温度补偿方法,基本上分为桥路补偿和应变片自补偿两大类。 3、什么是直流电桥若按桥臂工作方式不同,可分为哪几种各自的输出电压如何计算 4、为什么应变式传感器大多采用交流不平衡电桥为测量电路该电桥为什么又都采用半桥和全桥两种方式 5、应用应变片进行测量为什么要进行温度补偿常采用的温度补偿方法有哪几种 6、应变式传感器的基本工作原理是什么 3、答:桥臂的供电电源是直流电的称为直流电桥。 按桥臂工作方式不同,可分为单臂直流电桥、半桥差动直流电桥、全桥差动直流电桥。 单臂直流电桥输出电压为: 半桥差动直流电桥输出电压为: 全桥差动直流电桥输出电压为: 4、答:由于应变电桥的输出电压很小,一般要加放大器,但直流放大器易产生零漂, 所以应变电桥多采用交流电桥。又由于交流电桥的供电电源是交流,为了消除应变片引线寄生电容的影响,同时也为了满足交流电桥的平衡条件,常采用不平衡电桥测量电路。 交流不平衡电桥采用半桥和全桥的方式是为了消除非线性误差和提高系统灵敏度。 5、答:由于电阻温度系数的影响以及试件材料和电阻丝材料的线膨胀系数的影响,会给电阻应变片的测量带来误差,因此需要进行温度补偿。 常采用的温度补偿法有电桥补偿法和应变片自补偿法。 6、答:应变式传感器的基本工作原理:当被测物理量作用在弹性元件上,弹性元件在力、力矩或压力等的作用下发生形变,变换成相应的应变或位移,然后传递给与之相连的应变片,将引起应变敏感元件的电阻值发生变化,通过转换电路变成电量输出。输出的电量大小反映了被测物理量的大小。 2、变隙式电感传感器的输出特性与哪些因素有关 3、怎样改善变隙式电感传感器非线性怎样提高其灵敏度 4、差动变压器式传感器有几种结构形式 各有什么特点 5、差动变压器式传感器的零点残余电压产生的原因是什么怎样减小和消除它的影响 2、答:变隙式电感传感器的输出特性与衔铁的活动位置、供电电源、线圈匝数、铁芯间隙有关。 3、答:为改善变隙式电感传感器的非线性可采用差动结构。 如果变压器的供电电源稳定,则传感器具有稳定的输出特性; 另外,电源幅值的适当提高可以提高灵敏度,但要以变压器铁芯不饱和以及允许温升为条件。增加次级线圈和初级线圈的匝数比值和减小铁芯间隙都能使灵敏度提高。 知识点:变隙式电感传感器 4、答:差动变压器式传感器主要有变隙式差动传感器和螺线管式差动变压器两种结构形式。 差动变压器式传感器根据输出电压的大小和极性可以反映出被测物体位移的大小和方向。 螺线管式差动变压器如采用差动整流电路,可消除零点残余电压,根据输出电压的符号可判断衔铁的位置,但不能判断运动的方向;如配用相敏检波电路,可判断位移的大小和方向。 5、答:零点残余电压的产生原因:传感器的两次极绕组的电气参数与几何尺寸不对称,导致它们产生的感应电势幅值不等、相位不同,构成了零点残余电压的基波;由于磁性材料磁化曲线的非线性(磁饱和,磁滞),产生了零点残余电压的高次谐波(主要是三次谐波)。 为了减小和消除零点残余电压,可采用差动整流电路。 6、保证相敏检波电路可靠工作的条件是什么 6、答:保证相敏检波电路可靠工作的条件是检波器的参考信号u o 的幅值远大于变压器的输出信号u 的幅值,以便控制四个二极管的导通状态,且u o 和差动变压器式传感器的激励电压共用同一电源。 1、根据电容式传感器工作原理,可将其分为几种类型每种类型各有什么特点各适用于什么场合 2、如何改善单极式变极距电容传感器的非线性 3、电容式传感器有哪几种类型 4、差动结构的电容传感器有什么优点 5、电容式传感器主要有哪几种类型的信号调节电路各有些什么特点 6、简述电容式传感器的工作原理与分类。 1、 答:根据电容式传感器的工作原理,可将其分为3种:变极板间距的变极距型、变极板覆盖面积的变面积型和变介质介电常数的变介质型。 变极板间距型电容式传感器的特点是电容量与极板间距成反比,适合测量位移量。 变极板覆盖面积型电容传感器的特点是电容量与面积改变量成正比,适合测量线位移和角位移。 变介质型电容传感器的特点是利用不同介质的介电常数各不相同,通过介质的改变来实现对被测量的检测,并通过电容式传感器的电容量的变化反映出来。适合于介质的介电常数发生改变的场合。 2、答:单极式变极距电容传感器的灵敏度和非线性对极板初始间隙的要求是相反的,要改善其非线性,要求应增大初始间隙,但这样会造成灵敏度的下降,因此通常采用差动结构来改善非线性。 3、答:电容式传感器其分为3种:变极板间距的变极距型、变极板覆盖面积的变面积型和变介质介电常数的变介质型。 4、答:差动结构的电容传感器的优点是灵敏度得到提高,非线性误差大大降低。 5、答:电容式传感器的电容值及电容变化值都十分微小,因此必须借助于信号调节电路才能将其微小的电容值转换成与其成正比的电压、电流或频率,从而实现显示、记录和传输。相应的转换电路有调频电路、运算放大器、二极管双T 型交流电桥、脉冲宽度调制电路等。 调频电路的特点:灵敏度高,可测量μm 级位移变化量;抗干扰能力强;特性稳定;能取得高电平的直流信号(伏特级),易于用数字仪器测量和与计算机通讯。 运算放大器的特点:能够克服变极距型电容式传感器的非线性,使其输出电压与输入位移间存在线性关系。 二极管双T 型交流电桥的特点:线路简单,不须附加相敏整流电路,便可直接得到较高的直流输出电压(因为电源频率f 很高)。 脉冲宽度调制电路的特点:适用于变极板距离和变面积式差动电容传感器,且为线性特性。 6、答:电容式传感器利用了将非电量的变化转换为电容量的变化来实现对物理量的测量。 当被测参数变化引起A 、εr 或d 变化时,将导致电容量C 随之发生变化。在实际使用中,通常保持其中两个参数不变,而只变其中一个参数,把该参数的变化转换成电容量的变化,通过策略电路转换为电量输出。因此,电容式传感器可分为3种:变极板间距离的变极距型、变极板覆盖面积大变面积型和变介质介电常数的变介质型。 8、提高其灵敏度可以采取哪些措施,带来什么后果 E R R n n U o 11 2)1(?+= 1 12R R E U o ?=11R R E U o ?=传感器的主要参数特性
传感器性能指标
传感器与检测技术第3章 传感器基本特性参考答案
传感器动态特性的性能指标
磁电式速度传感器的动态特性分析及信号调理电路的仿真设计
《动态电路》专题训练(常用)
力传感器调理电路
2019年中考物理真题分类汇编(六)21 传感器型动态电路专题
传感器信号调理电路
传感器动态特性与静态特性的区别
传感器的静态特性
传感器应用电路设计
传感器的种类及特性分析
2019年中考物理真题分类汇编——传感器型动态电路专题(版包含答案)(最新整理)
ICP传感器调理电路设计
传感器简答