防喘振控制原理及方法

4.2 离心压缩机防喘振控制
4.2.1 离心压缩机的喘振
1.离心压缩机喘振现象及原因
离心式压缩机在运行过程中,可能会出现这样一种现象,即当负荷低于某一定值时,气体的正常输送遭到破坏,气体的排出量时多时少,忽进忽出,发生强烈震荡,并发出如同哮喘病人“喘气”的噪声。此时可看到气体出口压力表、流量表的指示大幅波动。随之,机身也会剧烈震动,并带动出口管道、厂房震动,压缩机会发出周期性间断的吼响声。如不及时 采取措施,将使压缩机遭到严重破坏。例如压缩机部件、密封环、轴承、叶轮、管线等设备和部件的损坏,这种现象就是离心式压缩机的喘振,或称飞动。
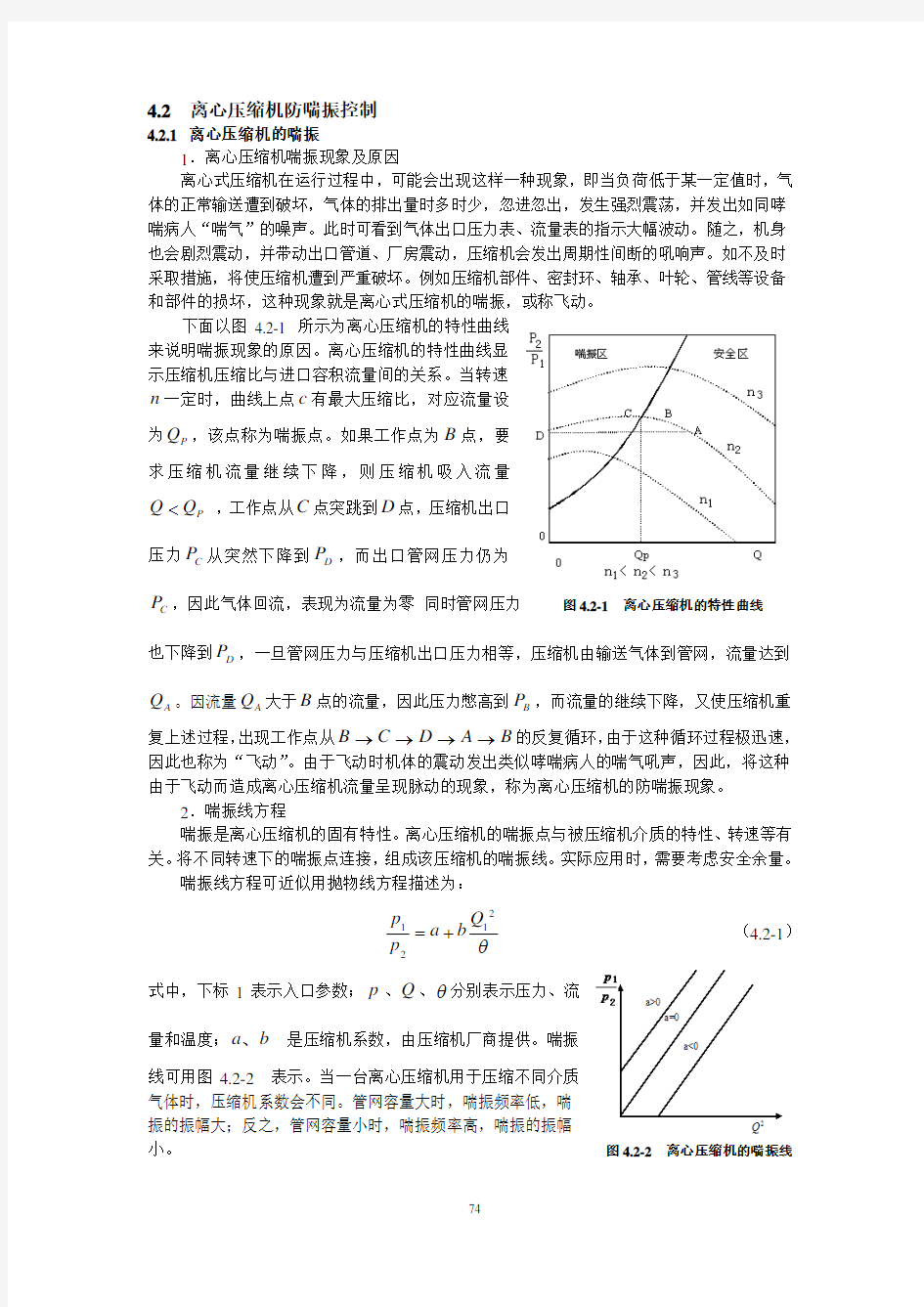
下面以图 4.2-1 所示为离心压缩机的特性曲线
来说明喘振现象的原因。离心压缩机的特性曲线显
示压缩机压缩比与进口容积流量间的关系。当转速
n 一定时,曲线上点c 有最大压缩比,对应流量设
为P Q ,该点称为喘振点。如果工作点为B 点,要
求压缩机流量继续下降,则压缩机吸入流量
P Q Q < ,工作点从C 点突跳到D 点,压缩机出口
压力C P 从突然下降到D P ,而出口管网压力仍为
C P ,因此气体回流,表现为流量为零 同时管网压力 图4.2-1 离心压缩机的特性曲线 也下降到
D P ,一旦管网压力与压缩机出口压力相等,压缩机由输送气体到管网,流量达到A Q 。因流量A Q 大于B 点的流量,因此压力憋高到B P ,而流量的继续下降,又使压缩机重
复上述过程,出现工作点从B A D C B →→→→的反复循环,
由于这种循环过程极迅速,因此也称为“飞动”。由于飞动时机体的震动发出类似哮喘病人的喘气吼声,因此,将这种由于飞动而造成离心压缩机流量呈现脉动的现象,称为离心压缩机的防喘振现象。
2.喘振线方程
喘振是离心压缩机的固有特性。离心压缩机的喘振点与被压缩机介质的特性、转速等有关。将不同转速下的喘振点连接,组成该压缩机的喘振线。实际应用时,需要考虑安全余量。
喘振线方程可近似用抛物线方程描述为:
θ
2
121Q b a p p += (4.2-1)
式中,下标1表示入口参数;p 、Q 、θ分别表示压力、流
量和温度;b a 、是压缩机系数,由压缩机厂商提供。喘振线可用图4.2-2 表示。当一台离心压缩机用于压缩不同介质
气体时,压缩机系数会不同。管网容量大时,喘振频率低,喘
振的振幅大;反之,管网容量小时,喘振频率高,喘振的振幅
小。 图4.2-2 离心压缩机的喘振线
3.振动、喘振和阻塞
喘振是离心压缩机在入口流量小于喘振流量时离心压缩机出现的流量脉动现象。
震动是高速旋转设备固有特性。旋转设备高速运转到某一
转速时,是转轴强烈震动的现象。它是因旋转设备具有自由振
动频率(称为自由振动频率),转速到该自由有振动频率的倍
数时,出现的谐振(这是的谐振称为谐振频率),造成转轴振
动。振动发生在自由振动频率的倍数,转速继续升高或降低时,
这这种振动会消失。
压缩机流量过大时,气体流速接近或达到音速,压缩机叶
轮对气体所做功全部用于克服振动损失,气体压力不再升高的
现象,这种现象称为阻塞现象。
离心压缩机的工作区、喘振区域阻塞区如图4.2-3所示,图4.2-3 离心压缩机的工作区、图中也给出了压缩机的最大和最小转速。喘振区与阻塞区
4.2.2 离心压缩机防喘振控制系统的设计
要防止离心式压缩机发生喘振,只需要工作转速下的
吸入流量大于喘振点的流量
P
Q。因此,当所需的流量小
于喘振点的流量时,例如生产负荷下降时,需要将出口的
流量旁路返回到入口,或将部分出口气体放空,以增加入
口流量,满足大于喘振点流量的控制要求。
防止离心式压缩机发生喘振的控制方案有两种:固定
极限流量(最小流量)法和可变极限流量法。图4。2-4 固定流量极限防喘振控制1.固定极限线流量防喘振控制
该控制方案的控制策略是假设在最大转速下,离心压缩机的喘振点流量
P
Q为(已经考
虑安全余量),如果能够使压缩机入口流量总是大于该临界流量
P
Q,则能保证离心压缩机
不发生喘振。控制方案适当入口流量小于该临界流量
P
Q时,打开旁路控制阀,使出口的部
分气体返回到入口,使入口流量大于
P
Q为止。如图 4.2-4 所示为固定极限流量防喘振控制系统的结构示意图。
固定极限流量防喘振控制具有结构简单、系统可靠性高、投资少等优点,但当转速较低时,流量的安全余量较大,能量浪费较大。适用于固定转速的离心压缩机防喘振控制。
固定极限流量防喘振控制与流体输送控制中旁路控制方案的区别见表1-1
表1-1 防喘振控制与旁路控制的区别
项目旁路流量控制固定极限流量防喘振控制检测点位置来自管网或送管网的流量压缩机的入口流量
控制方法控制出口流量,流量过大时
开旁路阀控制入口流量,流量过小时
开旁路阀
正常时阀的开度正常时,控制阀有一定开度正常时,控制阀关闭
积分饱和正常时,偏差不会长期存在,
无积分饱和偏差长期存在,存在积分饱
和问题
2.可变极限流量防喘振控制
该控制方案根据不同的转速,采用不同的喘振点流量(考虑安全余量)作为控制依据。由于极限流量(喘振点流量)变化,因此,称为可变极限流量的方喘振控制。可变极限流量防喘振控制系统是根据模型计算设定值的控制系统。离心压缩机的防喘振保护曲线如图
4.2-2所示,也可用模型描述为如果θ21
21Q b a p p +<,则说明流量大于喘振点处的流量,工况安全;如果θ2121Q b a p p +>,则说明明流量小于喘振点处的流量,工况处于危险状态。采用差压法测量入口流量,则有
M
p ZR p p K Q d d 1111θγ== (4.2-2) 式中1K 、Z 、R 、1M 分别为流量常数、压缩系数、气体常数和相对分子质量,d p 是入口流量对应的差压。因此,可以得到喘振模型
)(122
1ap p bK n p d -≥ (4.2-3) 式中,)(ZR M n =,当被压缩介质确定后,该项是常数;当节流装置确定后,1K 确定;a 和b 式与压缩机有关的系数,当压缩机确定后,它们也确定。
式(4.2-3)表明,当入口节流装置测量得到的差压大于上述计算时,压缩机处于安全运行
状态,旁路阀关闭。反之,当差压小于
该计算值时,应打开旁路控制阀,增加
入口流量。上述计算值被用于作为防喘
振控制器的设定值,因此,称为根据模
型计算设定值的控制系统。图4.2-5所
示为防喘振控制系统的结构。
图中PY 1是加法器,完成 21ap p - 的
运算,PY 2时乘法器,完成)
(21ap p -与)(2
1bK n 的相乘运算,其输出作为防 图4。2-5 可变极限流量防喘振控制 喘振控制器FC 的设定值。PT 1和PT 2是绝对压力变送器,测量离心压缩机的入口和出口压力,P d T 是入口流量测量用的差压变送器,其输出作为防喘振控制器FC 的测量值。
可变极限控制系统是随动控制系统。测量值是入口节流装置测得的差压值d p ,设定值是根据喘振模型计算得到的)()]([1221ap p bK n - ,当测量值大于设定值时,表示入口流量大于极限流量,因此,旁路阀关闭;当测量值小于设定值时,则打开旁路阀,保证压缩机入口流量大于极限流量,从而防止压缩机喘振的发生。
实施该控制方案时注意事项如下:
(1)可变极限流量防喘振控制系统是随动控制系统,为了使离心压缩机发生喘振时及时打开旁路阀,控制阀流量特性宜采用线性特性或快开特性,控制阀比例度宜较小,当采用积分控制作用时,由于控制器的偏差长期存在,应考虑防积分饱和问题。
(2)采用常规仪表实施离心压缩机的防喘振控制系统时,应考虑所用仪表的量程,进行相应的转换和设置仪表系数;采用计算机或DCS 实施时,可以直接根据计算式计算设定值,并能自动转换为标准信号。
(3)为了使防喘振控制系统及时动作,在采用起动仪表示时,应缩短连接到控制阀的信号传输管线,必要时可设置继动器或放大器,对信号进行放大。
(4)防喘振控制阀两端有较高压差,不平衡力大,并在开启时造成噪声、汽蚀等,为此,防喘振控制阀应选用消除不平衡力的影响、噪声及具有快开慢关特性的控制阀。
(5)可以有多中实施方案,例如,可将)12ap p p d -作为测量值,将21bK n 作为设定
值;或将1p p d 作为测量值,将]))][(([1221a p p bK n -作为设定值等;应根据工艺过程的特点确定实施方案。通常,应将计算环节设置在控制回路外,以避免引入非线性特性。
(6)根据压缩机的特性,有时可简化计算,例如,有些压缩机的0=a ,或1=a 等,这时,模型可简化为:
当0=a 时 221
p bK n p d ≥ (4.2-4) 当1=a 时 )(122
1p p bK n p d -≥ (4.2-5) 4.2.3 测量出口流量的可变极限流量防喘振控制
有些应用场合,例如,压缩机入口压力
较低,压缩比有较大时,在压缩机入口
安装节流装置造成的压降可能是压缩机
为达到所需出口压力而需增加压缩机的
级数,使投资成本提高。这时,为防止
喘振的发生,可将测量流量的节流装置
安装在出口管线,组成可变极限流量防
喘振的变型控制系统。该控制系统是基
于同一压缩机出口的质量流量应等于入
口的质量流量。
问题的提出:入口流量无法测量(如
无安装位置、入口压力低不允许大的压
损等)。 图 4。2-6 可变极限流量防喘振控制变型
依据:出口处测得的重量流量和入出测得的重量流量时相等的设入口和出口孔板的校正系数K 1和K 2相等。
特点:采用孔板测量出口流量,可允许较大的压力损失可用于高压缩比的场合需要考虑出口和入口温度(重度变化)的影响有些场合,计算式可更简化。
4.2.3 离心压缩机串并联时的方喘振控制
离心压缩机可以串联运行或并联运行,但这将增加运行操作的复杂性,并使能量消耗增大,因此,并不推荐使用,仅当工艺压力或流量不能满足要求时才不得不采用。这时,串并联运行的防喘振控制系统要比单台压缩机的防喘振控制系统复杂,即操作系统需要协调。离心压缩机串联运行时的防喘振控制
1.压缩机串联运行时的变极限流量的防喘振控制
当一台离心压缩机的出口压力不能满足生产要求时,需要量太或两台以上的离心压缩机串联运行。串联运行与多级压缩相似。图4.2-7 所视为离心压缩机串联运行时采用的一种可变极限流量防喘振控制的控制方案。
图 4.2-7 压缩机串联运行时的变极限流量的防喘振控制
图中,PY1、PY2时加法器,PY3是低选器,PY4、PY5是乘法器。P1T、P2T和P3T 是压力变送器,P d1T、P d2T测量流量的差压变送器,F1C、F2C是防喘振控制器。与单台
压缩机的防喘振控制相同,对压缩机1和压缩机2都采用可变极限防喘振控制,将计算机的设定值送防喘振控制器,为了减少旁路阀,增加了一台低选器,只要其中任一台压缩机出现喘振,都通过低选器,是旁路阀打开。防喘振控制器选用正作用,旁路控制阀选用气关型。图中未画出得控制器积分外反馈信号引自低选器输出,与选择性控制系统防积分饱和时的连接相同。使用时注意:离心压缩机的串联运行只是用于低压力的压缩机,对高压力压缩机,考虑机体的强度,不宜采用串联运行;为保证系统的稳定运行,对后级压缩机的稳定工况宜大于前级。
2. 离心压缩机并联运行时的防喘振控制
当一台压缩机的打气量不能满足工艺要求时,需要两台或两台以上离心压缩机并联运行。如果并联运行的压缩机特性不一致,就会影响负荷的分配,并影响防喘振控制系统的正常运行。压缩机并联运行的防喘振控制有两种方案。一种方案时每台压缩机设置各自的防喘振控制系统,这时,任一台压缩机都能够单独运行,并可前后启动运行,但仪表设备、工艺管线的投资较大,不常采用。另一种方案是采用低选器和选择开关,只用一个防喘振的旁路控制阀,如图4.2-8 所示。
图 4.2-8 并联离心压缩机可变极限流量选择性防喘振控制
图4.2-8中,P1T、P2T时入口和出口的压力变送器,P d1T、P d2T时压缩机入口流量测量用差压变送器,P1Y、P2Y、P3Y分别是加法器、乘法器和低选器,FC时防喘振控制器,HS是手动开关。当开关切换到A时,组成压缩机1的防喘振控制;当开关切换到B时,组成压缩机2的防喘振控制;当开关切换到C时,防喘振控制器的测量信号是两个压缩机入口流量的低值,即低选器的输出,因此,用于两个压缩机并联运行时得防喘振控制。防喘振控制得设定值计算采用加法器和乘法器实现。实施时注意:两个压缩机的特性应一致;不能
实现两台压缩机前后启动运行;为使单台压缩机独立启动,须设置各自的手动旁路阀。
防喘振控制原理及方法
4.2 离心压缩机防喘振控制 4.2.1 离心压缩机的喘振 1.离心压缩机喘振现象及原因 离心式压缩机在运行过程中,可能会出现这样一种现象,即当负荷低于某一定值时,气体的正常输送遭到破坏,气体的排出量时多时少,忽进忽出,发生强烈震荡,并发出如同哮喘病人“喘气”的噪声。此时可看到气体出口压力表、流量表的指示大幅波动。随之,机身也会剧烈震动,并带动出口管道、厂房震动,压缩机会发出周期性间断的吼响声。如不及时 采取措施,将使压缩机遭到严重破坏。例如压缩机部件、密封环、轴承、叶轮、管线等设备和部件的损坏,这种现象就是离心式压缩机的喘振,或称飞动。 下面以图 4.2-1 所示为离心压缩机的特性曲线 来说明喘振现象的原因。离心压缩机的特性曲线显 示压缩机压缩比与进口容积流量间的关系。当转速 n 一定时,曲线上点c 有最大压缩比,对应流量设 为P Q ,该点称为喘振点。如果工作点为B 点,要 求压缩机流量继续下降,则压缩机吸入流量 P Q Q < ,工作点从C 点突跳到D 点,压缩机出口 压力C P 从突然下降到D P ,而出口管网压力仍为 C P ,因此气体回流,表现为流量为零 同时管网压力 图4.2-1 离心压缩机的特性曲线 也下降到 D P ,一旦管网压力与压缩机出口压力相等,压缩机由输送气体到管网,流量达到A Q 。因流量A Q 大于B 点的流量,因此压力憋高到B P ,而流量的继续下降,又使压缩机重 复上述过程,出现工作点从B A D C B →→→→的反复循环, 由于这种循环过程极迅速,因此也称为“飞动”。由于飞动时机体的震动发出类似哮喘病人的喘气吼声,因此,将这种由于飞动而造成离心压缩机流量呈现脉动的现象,称为离心压缩机的防喘振现象。 2.喘振线方程 喘振是离心压缩机的固有特性。离心压缩机的喘振点与被压缩机介质的特性、转速等有关。将不同转速下的喘振点连接,组成该压缩机的喘振线。实际应用时,需要考虑安全余量。 喘振线方程可近似用抛物线方程描述为: θ 2 121Q b a p p += (4.2-1) 式中,下标1表示入口参数;p 、Q 、θ分别表示压力、流 量和温度;b a 、是压缩机系数,由压缩机厂商提供。喘振线可用图4.2-2 表示。当一台离心压缩机用于压缩不同介质 气体时,压缩机系数会不同。管网容量大时,喘振频率低,喘 振的振幅大;反之,管网容量小时,喘振频率高,喘振的振幅 小。 图4.2-2 离心压缩机的喘振线
风机的喘振保护构成原理及具体措施
风机的喘振保护构成原理 轴流风机性能曲线的左半部具有一个马鞍形的区域,在此区段运行有时会出现风机的流量、压头和功率的大幅度脉动,风机及管道会产生强烈的振动,噪声显著增高等不正常工况,一般称为“喘振”,这一不稳定工况区称为喘振区。实际上,喘振仅仅是不稳定工况区内可能遇到的现象,而在该区域内必然要出现的则是旋转脱流或称旋转失速现象。这两种工况是不同的,但是它们又有一定的关系。象17如下图图所示:轴流风机Q-H性能曲线,若用节流调节方法减少风机的流量,如风机工作点在K点右侧,则风机工作是稳定的。当风机的流量Q < QK时,这时风机所产生的最大压头将随之下降,并小于管路中的压力,因为风道系统容量较大,在这一瞬间风道中的压力仍为HK,因此风道中的压力大于风机所产生的压头使气流开始反方向倒流,由风道倒入风机中,工作点由K点迅速移至C点。但是气流倒流使风道系统中的风量减小,因而风道中压力迅速下降,工作点沿着CD线迅速下降至流量Q=0时的D点,此时风机供给的风量为零。由于风机在继续运转,所以当风道中的压力降低倒相应的D点时,风机又开始输出流量,为了与风道中压力相平衡,工况点又从D跳至相应工况点F。只要外界所需的流量保持小于QK,上述过程又重复出现。如果风机的工作状态按F-K-C-D-F周而复始地进行,这种循环的频率如与风机系统的振荡频率合拍时,就会引起共振,风机发生了喘振。风机在喘振区工作时,流量急剧波动,产生气流的撞击,使风机发生强烈的振动,噪声增大,而且风压不断晃动,风机的容量与压头越大,则喘振的危害性越大。故风机产生喘振应具备下述条件: a)风机的工作点落在具有驼峰形Q-H性能曲线的不稳定区域内; b)风道系统具有足够大的容积,它与风机组成一个弹性的空气动力系统; c)整个循环的频率与系统的气流振荡频率合拍时,产生共振。
防喘振
1. 压缩机的防喘振控制方案 以往方案大致可分为固定极限流量和可变极限流量防喘振控制两类。但到目前为止,对于不同摩尔质量、温度、压力的压缩气体,还没有一种切实可行的方法来有效、精确地计算压缩机的喘振线,通常都是建立一个较大的额外安全空间,保证机组在可预设的最佳工作状况下安全运行,但这种方法使得压缩机的工作效率大为降低,因此有关的专业技术人员一直在寻找更有效的方法来解决防喘振控制过程中的安全与效率问题。TS3000 系统的成功应用, 就较好地解决了此问题。 2. 喘振线作图的基本方法 压缩机防喘振控制系统的基本原理,如图2 所示。 图中:Yl=Y2/Y3=Pd/Ps=(PT2+ 1.0332)/(PT1+1.0332); SP=Y4=V(Pd/Ps)+K(给定);Y5= h/Ps=FT5/(PT1+1.0332)(测量)采用Pd/Ps 和c·h/Ps 做喘振曲线,其基本形状为抛物线,而采用Pd/Ps 和(c· h/Ps )2作图时得到的喘振线则在工作点附近基本呈直线形状(简化后,C2h/Ps)。 其关系式如下: h/Ps=V·(Pd/Ps)+K式中,Pd—压缩机出口压力(绝压),kPa;Ps—压缩机入口压力(绝压),kPa;C—常数(由孔板尺寸决定),m2;h—孔板差压(与流量的关系式为Q2=H),kPa 3. 工艺控制方案 (1)压缩机防喘振调节画面组成
(a)防喘振动态示意图,将压缩机实际工作点在防喘振示意图上相应显示。 (b)动态数据,将实际工作点数据在ESD 画面相应处显示。 (c)点击ESD 流程图上相应调节阀,可弹出PID 画面,可在线修改设定值或输出值。 (2)调节防喘振电磁阀设定3 种状态,正常运转状态下,可设定自动调节,开停工或异常状态下, 可设定手动调节或强制调节。 (3)报警 利用声光报警及画面报警提示。 (4)控制要点 (a)开压缩机前,应先将防喘振阀强制打开至100%。 (b)当压缩机实际工作点靠近防喘振线时,应提高压缩机转速,维持正常生产,若压缩机 转速已达最大,则应打开防喘振阀,并适当降低装置负荷,保证压缩机的正常运行。 (c)当压缩机进入喘振区,ESD 声光报警时,应立即打开防喘振阀,并相应降低装置生产 负荷,消除喘振,使压缩机回到正常工作区运转,避免压缩机损坏或故障。 (5)机组喘振线及防喘振线示意图 见图3。
失速与喘振
摘要:阐述了轴流通风机失速与喘振的形成机理,结合2×600MW机组一次风机的喘振问题,分析了失速与喘振的原因,同时还制定了检查及整改措施。 关键词:轴流式通风机失速喘振 中图分类号:TH432.1 文献标识码:B 文章编号:1006-8155(2007)03-0000-00 Analysis on Stall and Surge of Variax Blade Adjustable Axial Fl ow Fan and Improvement Measure Abstract: The formation principle of stall and surge for axial fl ow fan was elucidated, analyze the reason of stall and surge bonding the surge problem of 2*600MW primary fan, at one time, draw the measure of check and improvement. Key Words: Axial fl ow fan Stall Surge 0 引言 由于动叶可调轴流通风机具有体积小、质量轻、低负荷区域效率较高、调节范围宽广、反应速度快等优点,近十年来,国内大型火力发电厂已普遍采用动叶可调轴流通风机。因为轴流通风机具有驼峰形性能曲线这一特点,理论上决定了风机存在不稳定区。风机并不是在任何工作点都能稳定运行,当风机工作点移至不稳定区时就有可能引发风机失速及喘振等现象的发生。 笔者针对扬州第二发电有限责任公司二期扩建工程2×600MW 机组一次风机在安装、调试期间发生的失速问题,对失速与喘振的原理进行了分析,并提出了相应检查和整改措施,以及风机在正常运行过程中如何避免失速与喘振的发生。 1 轴流通风机失速与喘振的关系
循环气压缩机防喘振控制(内容充实)
循环气压缩机防喘振控制 摘要: 本文系统介绍TRICON系统在循环气压缩机机组防喘振控制的应用及控制原理。重点介绍防喘振系统的功能模块的构建,同时简述机组运行故障时的检修方法与分析思路。 关键词定义: 喘振机理喘振线防喘振控制安全裕量盘旋设定点 1、前言: 大型离心式压缩机组由于其高效,经济,在现代企业中应用广泛,成为工艺连续运行的“心脏”。但是由于其造价相对于往复式压缩机而言要高很多,控制系统复杂,而且占用的空间大等缺点,对于工艺成熟的企业一般不设置备用机组。喘振是离心式压缩机固有的特性,每一台离心式压缩机都有它一定的喘振区,因此只能采取相应的防喘振调节方案以防止喘振的发生。本文以天利高新技术公司醇酮厂的循环气压缩机C41101(SVK1-H型)为例,详细介绍TRICON三重化控制系统如何构建机组防喘振系统,并简述防喘振仪表常见故障的处理方法。 2、离心式压缩机喘振机理: 离心式压缩机的特性曲线与喘振 离心式压缩机的特性曲线是指压缩机的出口压力与入口压力之比(或称压缩比)与进口体积流量之间的关系曲线P2/P1~Q的关系,其压缩比是指绝对压力之比,特性曲线如图所示: 图2.1 离心式压缩机喘振曲线 由图2.1可见,其特性曲线随着转速不同而上下移动,组成一组特性曲线,而且每一条特性曲线都有一个最高点。如果把各条曲线最高点联接起来得到一条表征喘振的极限曲线,如图中虚线。所以,图中还有阴影部分称为喘振(或飞动)区;在虚线的右侧为正常工作区。实线与虚线之间是临界区,压缩机可以运行,但太靠近喘振区,应尽量避免长期工作。
图2.2固定转速机下的特性曲线 图2.2是一条某一固定转速机下的特性曲线,喘振时工作点由A-B-C-D-A反复迅速的突变。 喘振是一种危险现象,发生喘振时,可发现在入口管线上的压力表指针大幅度摆动,流量指示仪表也发生大幅度的摆动.喘振现象会损坏压缩机的各部件,轴承和密封也将受到严重损害,严重时造成轴向窜动,甚至打碎叶轮,烧轴,使压缩机遭受破坏。 喘振是离心式压缩机固有的特性,每一台都有它一定的喘振区,因此只能采取相应的防喘振调节方案以防喘振的发生。 3、工艺流程简介: 醇酮装置是利用环己烷(C6H12)在铁系催化剂的催化作用下与贫氧空气(氧含量:10%)中的氧组分发生氧化反应,生成环己醇(分子式:C6H11OOH)、环己酮(分子式:C6H10O)、还己基过氧化物(可分解为环己醇、环己酮),前两者合称醇酮。另外,由于反应温度、氧气含量的不同,会产生甲酸、二元酸等付产品。 循环气压缩机组是用于反应尾气的重复利用,与来自新鲜空气压缩机C41102的新鲜空气配制贫氧空气(氧含量:10%)。循环气机组部分的实时工艺流程如图3.1,流程说明如下: 4.5MPa中压蒸汽自管网来,经过减温减压后至4.1MPa,用于驱动汽轮机(杭汽大陆产:B0.3-4.1/1.1型)C41101/2,蒸汽凝结水直接排入地沟。汽轮机通过齿轮变速箱升速后驱动贫氧空气压缩机C41101/1,使之达到18831r/min。 经过醇酮反应器贫氧催化反应消耗掉贫氧空气中氧组分的尾气,通过洗涤工艺后主要成分为氮气(N2:95.52%),氧气(O2:3.44%)、微量CO、CO2、环己烷蒸汽等。经过贫氧空气压缩机入口气液分离器分离出凝结液体后进入压缩机升压,经出口气液分离后进入气气混合器R41103,与来自新鲜空气压缩机的新鲜空气混合调配成氧含量为不大于10%的贫氧空气,送往醇酮反应器进行贫氧催化反应。
喘振与失速区别
谁知道风机失速、喘振、抢风都什么意思,三者有什么关系?我在网上查过,但都没看太明白,望不吝赐教。 失速是风机本身特性引起的 喘振是风压由于管道压力的滞后导致与风机出口压力周期性变化,就来来回倒腾 抢风如这个词,两台风机不是你出力大就是我大,搞的最后两败俱伤。 我的理解 轴流风机的喘振与失速是不同的情况可以简单概括如下: 喘振一般发生在性能曲线带驼峰的轴流风机低负荷运行时; 失速一般发生在动叶可调轴流风机的高负荷区。主要是动叶指令太大导致,叶片进风冲角过大引起叶片尾部脱流产生风机失速带驼峰 抢风是当并联轴流风机中的一台发生喘振或失速时人们的一般性叫法。 喘振是指当风机处于不稳定工作区运行,可能会出现流量、全压的大幅度波动,引起风机及管路系统周期性的剧烈波动,并伴随着强烈的噪声。 避免喘振主要采用合适的调节方式 抢风是指风机并联运行中有时会出现一台风机流量大,另一台流量特别小,稍加调节情况相反 避免抢风主要有: 1。不采用不稳定性能风机 2.同时在低负荷运行时可以单台运行 3.采取动叶调节 4.开启旁路风
一、风机失速 图1:风机失速 轴流风机叶片通常都是流线型的,设计工况下运行时,气流冲角(即进口气流相对速度w 的方向与叶片安装角之差)约为零,气流阻力小,风机效率高。当风机流量减小时,w的方向角改变,气流冲角增大。当冲角增大到某一临界值时,叶背尾端产生涡流区,即所谓的脱流工况(失速),阻力急剧增加,而升力(压力)迅速降低;冲角再增大,脱流现象更为严重,甚至会出现部分叶道阻塞的情况。 由于风机各叶片存在安装误差,安装角不完全一致,气流流场不均匀相等。因此,失速现象并不是所有叶片同时发生,而是首先在一个或几个叶片出现。若在叶道2中出现脱流,叶道由于受脱流区的排挤变窄,流量减小,则气流分别进入相邻的1、3叶道,使1、3叶道的气流方向改变。结果使流入叶道1的气流冲角减小,叶道1保持正常流动;叶道3的冲角增大,加剧了脱流和阻塞。叶道3的阻塞同理又影响相邻叶道2和4的气流,使叶道2消除脱硫,同时引发叶道4出现脱流。也就是说,脱流区是旋转的,其旋转方向与叶轮旋转方向相反。这种现象称为旋转失速。 与喘振不同,旋转失速时风机可以继续运行,但它引起叶片振动和叶轮前压力的大幅度脉动,往往是造成叶片疲劳损坏的重要原因。从风机的特性曲线来看,旋转失速区与喘振区一样都位于马鞍型峰值点左边的低风量区。为了避免风机落入失速区工作,在锅炉点火及低负荷期间,可采用单台风机运行,以提高风机流量 二、风机喘振: 图1:风机喘振 图2:风机喘振报警线
防喘振阀简介
FISHER防喘振阀简介防喘振阀技术的关键在于其可靠性和最佳性能。 其重要特点: 一、保护压缩机 1、阀门必须快开与完全可靠; 2、阀门流量充分以防止起浪点; 3、避免噪音和振动所产生的压缩机和管道损害。 二、起动和停车时的敏感控制 1、阀门应随阶跃响应而活动,超调应限制在最小; 2、阀门备有正反馈位置; 3、阀门仪表附件调整简单。 典型气路图如下:
概述:整个气路的功能在正常情况下实现精确的阀位控制,快开慢关;在紧急情况(失气、失电)下快速打开阀门以保护压缩机。 正常情况(即调节控制)下,两个电磁阀带电,对三通电磁阀,3和2通;两通电磁阀,1和2断开。这时经过过滤减压后的空气分成三路,一路经单向阀到四通,然后到2625、储气罐、377的F口;一路经三通电磁阀后,到377的SUP口,来自SUP口的气体压缩377内部弹簧,这样在377内部气路中,A口和B口通,D口和E口通;另一路到DVC6020的SUP口,作为DVC的气源。当控制信号(控制系统DCS/PLC输出到DVC6020的4-20MA 信号)增大时,定位器A口输出增大,B口输出减小;增大的A口气压经377A-B口、快排阀后作用在汽缸(1061执行机构)上腔;B口的气压经377D-E口作为气路放大器2625的输入信号,控制2625输出到汽缸(1061执行机构)下腔的压力;这时,汽缸活塞上部的压力》下部的压力+管道
风压作用在碟板上的力+机构摩擦力,活塞往下运动,由铭牌上ACTION:PDTC(PUSH DOWN TO CLOSE,意思就是活塞往下运动时,阀门关闭)可知,阀门开口度减小。反之,控制信号减小,定位器A口输出减小,B口增大,这时由于有快排阀和气路放大器2625的作用,活塞快速往上运动,阀门实现快开。 当电磁阀失电,对三通电磁阀,1和2通,两通电磁阀1和2通; 这时,377SUP口的压力经三通电磁阀1口卸掉,377在其内部弹簧的作 用下,气路发生转换,B口和C口通,E口和F口通;储气罐的气加上 气源的气经377F-E口后作为气路放大器2625的控制信号,由于这时储 气罐的气压很高(等于减压阀出口压力),使2625主阀口开得很大,储 气罐里的气和气源的气以最大流量经2625进入汽缸下腔,汽缸上腔的 气经快排阀、两通电磁阀快速排向大气,阀门快速打开。 当失气时,由于有单向阀的存在,使得储气罐的压缩空气不致倒流。 整个原理同失电一样,只是使阀门快速打开的只有储气罐里的压缩空气。 储气罐里的压缩空气除了在气源失气时使阀门快速打开外,正常情 况下起稳定气路压力的作用。 各个主要附件的功能简介: 一、过滤器262K 主要功能:除去气源中污垢、水垢和一些固体杂质。
预旋技术防喘振原理
预旋技术防喘振原理 旋转进口导流叶片和静叶片的防喘机理:通过旋转进口导流叶片,使其出气角改变,控制导流叶片出气角的大小和方向可以使流入第一级动叶的气流攻角处于正常位置,调节旋转前面级的静叶片出气角可以使这些静叶片后的动叶处于满意的工况下工作,因而可以避免喘振,并使压气机偏 离设计工况下仍能保持正常工作。 从速度三角形分析,用旋转静叶片防止喘振的方法,就是在非设计工况时改变压气机速度三 角形上的预旋(改变C1u)来改变冲角i,使气流速度W1的方向,保持在设计值附近,部分地消除喘振。在图2中给出了如果进口导流叶片不能转动,当工作轮转速不变,气流轴向速度C1a发生变化(即来流流量发生变化)时叶型上气流的冲角所发生的改变。从图中可以看出在流量大于或小于设计流量时,转子叶片的来流攻角将小于或等于0,此时叶片压、吸力面就会发生不同程度的分离, 严重时可能导致压气机喘振。 图3表示借助于适当的转动导流叶片安装角可以使气流流入工作轮叶片通道内的相对速度方向在流量变化时保持不变,这就保证了转子叶片在非设计工况下都可以工作在设计状态附近,从而消除了喘振[4]。 可调进口导流叶片和静叶叶片,作为多级轴流压气机的防喘措施之一,其优点突出,不仅达到防喘措施,而其非设计工况下效率高,同时还可以改善燃机的加速性,又适用于高增压比压气机,所以这种防喘调节机构广泛地应于80年代新发展的压气机设计中,同时在大型风机中也得到很好的应用,如陕西鼓风机厂在这种理论指导下已成功研制出全静叶可调的大型鼓风机。 鉴于该方法广泛的工程应用前景,国内外许多学者、专家都在这方面开展了大量的探索研究,并取得许多卓有成效的理论和试验成果。我国张健等[4]应用试验的方法,在设计转速下,通过试验调节一台三级轴流压气机各级组合,找到了压气机的一组最佳角度匹配。试验结果分析表明,静叶角度的改变对压气机性能有着极为明显的影响,采用最佳角度匹配,最高绝热效率提高了7.4个百分点,稳定工作裕度也有显著的增加。对于如何改善低速状态下的压气机性能,夏联等[5]进行了一台七级轴流高压压气机的静叶调节试验研究。试验结果分析表明:在低速状态下,通过静叶角度优化调节能有效地改善压气机性能,拓宽稳定工作范围;并且,压气机低速性能受静叶可调角度的配比影响很大。静叶角度调节技术与其他技术相结合,能更有效地改善压气机性能。楚武利等[6]通过试验研究了带导叶的单级轴流压气机在进口导叶无预旋、全叶高预旋2度和叶顶端部预旋2度时,压气机总性能、基元性能及失速边界的变化情况。对比分析了三种导叶在不同转速下的性能曲线,结果表明导叶预旋对压气机在非设计转速下有很好的扩稳效果;进一步研究发现:利用端弯技术可以推迟轴流压气机不稳定流动的发生,扩大压气机稳定工作范围。另外西北工业大学的范非达等也在这方面开展了大量工作并取得良好的效果[7~8]。 但这种防喘措施结构比较复杂,特别是对多级静叶调节实现起来更加困难。此外从气动方面来看,这种方法只能着重改善气流沿叶高某一半径上的流动情况,对整个叶片的三维流动不能很好的兼顾,例如照顾了平均半径就不能很好地照顾叶尖和叶根。
高炉轴流风机防喘振控制系统优化及实验
高炉轴流风机防喘振控制系统优化及实验 摘要:针对萍钢4#高炉鼓风机存在的问题,阐明了防喘振控制优化的方案,包括工况点沿防喘线精确控制,入口温度对喉部差压、出口压力的补偿,提出了控制优化的具体实施方法,优化达到了预期目标。 【关键词】轴流风机防喘振优化实施 一、前言 高炉鼓风机是高炉炼铁生产的关键动力设备,为确保鼓风机的安全稳定运行,在其控制系统中必须配备防喘振自动控制,并应兼顾高炉生产、机组安全、节能降耗等各方因素,高炉作为鼓风机供风的负载,炉内状况瞬息万变,鼓风阻力发生扰动,控制系统将使防喘振阀动作,就会在高炉意外崩料和风机喘振之间处于两难的境地,本文以萍乡钢铁公司4#高炉鼓风机的防喘振控制优化为例,阐述控制系统在防喘振调节过程中如何保证送风压力的稳定性,在安全运行前提下充分发挥风机能力,进而为高炉稳产、高产奠定基础。 二、存在的问题 萍乡钢铁公司4#高炉采用AV45-13全静叶可调式轴流风机,由于防喘振控制侧重于保护鼓风机,加之防喘振控制品质不高,2010年投产以来,防喘振控制系统运行状况不甚理想,主要表现在以下几方面: 1)防喘阀开度基本在10%左右,轴流风机经常处于放风状态,造成大量无谓能量损失,放风噪声污染严重。 2)防喘振的控制品质有待提高:一旦高炉路况不顺,鼓风阻力增大使风机工况点进入调节区时,通常是采用人工紧急干预打开防喘阀使工况点回到稳定工作区,保守的安全意识使工况点总是远离防喘振线。 3)不同入口温度对风机喘振性能有较大影响,采用固定的喘振性能曲线不能真实地反映风机喘振性能,一方面可能影响风机的安全、稳定运行,另一方面可能制约风机供风能力的充分发挥。 三、防喘振控制优化方案 1.防喘振控制优化的先决条件 为了实现防喘振控制的优化,必须借助于性能优良的PLC系统。PLC的高速运算性能可使用户程序的扫描周期在10毫秒级,为有效克服鼓风阻力瞬变扰动成为可能;PLC丰富的运算和编程功能可以实现各种先进控制算法,达到预期的控制效果;PLC的高可靠性,实现风机控制系统的安全运行进而确保风机的安全可靠运行。4#高炉鼓风机采用西门子S7-400H PLC,配备冗余414CPU可很好地实现各项控制任务。 为了实现防喘振控制的优化,必须借助于性能优良的防喘振阀。防喘振阀具有可靠的快开性能,当一旦压力过高,可释放由于喘振引起的压力波动;防喘振阀应具有良好的调节性能,当运行点接近防喘振线时,能充分调节流量以防止起浪点;防喘阀应具备灵敏的阶跃响应,超调应限制在最小,可满足风机在启动和停车时的压力、流量变化。4#高炉鼓风机采用的fisher防喘阀可以较好地满足上述要求。 2. 工况点沿防喘线精确控制 (1)防喘振的基本控制方法以喉部差压为横坐标、以出口压力为纵坐标,建立了运行工况画面,画面包含喘振线(红线)、喘振报警线(黄线)和防喘振控制线(蓝线),黄线和蓝线分别设在红线下方97%和93.5%处,以实际运行工况下的喉部差压和出口压力坐标建立运行工况点,如下图所示。根据当前喉部差压(补偿后),在防喘线上查询对应的出口压力,作为防喘振控制的给定值SP,以当前风机出口压力作为防喘振控制的测量值PV,二者之偏差西门子STEP7的PID模块FB41进行控制运算,当工况点接近或越过蓝线时,PLC控制防喘阀打开一定角度,来减小压缩机出口的阻力,使工况点回到稳定工作区,以避免轴流风机喘振现象的发生。 在工况点接近喘振线时,要求轴流风机的防喘阀必须动作迅速,但防喘阀动作速度太快、动作幅度过大,势必会使风机出口压力、流量产生大幅度波动,影响高炉炉况的稳定。由于防喘振控制是以风机吸入气体流量和排气压力为调节对象,二者的变化都具有极强的瞬时性,而信号测量、计算输出、执行机构动作及工艺过程都不可避免会产生一定的时间滞后,在这样一个瞬时性非常强的闭环控制回路里,以滞后的测量信号为计算依据,采用的常规的PID运算,虽然可以在工况点跃过防喘线时迅速地打开放空阀,但无法使工况点在响应线附近被稳定控制,难以实现精确控制。
离心风机喘振现象及原因
关于风机喘振现象的原因和避免方法 1、喘振现象及原因 具有驼峰型特性的风机在运行过程中,当负荷减小,负载流量下降到某一定值时,出现工作不稳定现象。这时流量忽多忽少,一会儿向负载排气,一会儿又从负载吸气,发出如同哮喘病人“喘气”的噪声,同时伴随着强烈振动,这种现象称之为喘振。 发生喘振现象的根源是离心风机所具有的驼峰型特性。图一给出了具驼峰型特性的离心风机的工作特性曲线。 图中,曲线1是离心风机在某一转速下的特性曲线,代表出口绝压P2和入口绝压P1之比与风机流量之间的关系,是一个驼峰曲线,驼峰点M处的流量为Qm。曲线2是管路特性曲线,正常工作点为A。可以看出,在驼峰点右侧,工作是稳定的。因为任何偶然因素造成的工作点波动(例如流量增加),对于风机特性曲线1而言,压力会减小,而对于管路特性曲线2而言,压力会增加,这两个相互矛盾的结果最终会使工作点返回到原来的位置,在驼峰点M的左侧,这种情况正好相反,任何偶然因素造成的工作点波动将使沿风机特性曲线1上的压力变化趋势与沿管路特性曲线2上的压力变化趋势具有完全的一致性,其结果加剧了工作点的偏移,使之不能返回到原来的工作点上,风机的工作出现不稳定情况。 因此,驼峰点M右侧的区域为稳定工作区域,驼峰点M左侧的区域为不稳定工作区域。负荷下降使处于驼峰右侧的工作点向驼峰点靠近,工作点越靠近驼峰点M,越会出现工作不稳定的可能性,驼峰型特性是发生喘振现象的主要原因。 2、防喘振控制思路 图二给出了风机在不同转速下的特性曲线,可以看出。转速不同,相应的驼峰点和驼峰流量也不同。转速越低,驼峰点越向左移,驼峰流量越小。把不同转速下的驼峰点连接起来,就构成了一条曲线,曲线右侧为稳定工作区,曲线左侧为喘振区。我们称驼峰流量为极限流量,相应的驼峰点连接曲线被称为喘振极限线。 显然,只要在任何转速下,控制风机的流量,使其大于极限流量,则风机便不会发生喘振问题。这就是防喘振控制的基本思想。
风机喘振与失速
一,风机失速与喘振 1、失速是叶片结构特性造成的一种流体动力现象,如:失速区的旋转速度、脱流的起始点、消失点等,都有它自己的规律,不受风机系统的容积和形状的影响。 2、喘振是风机性能与管道装置耦合后振荡特性的一种表现形式,它的振幅、频率等基本特性受风机管道系统容积的支配,其流量、压力功率的波动是由不稳定工况区造成的,但是试验研究表明,喘振现象的出现总是与叶道内气流的脱流密切相关,而冲角的增大也与流量的减小有关。所以,在出现喘振的不稳定工况区内必定会出现旋转脱流。 3、喘振时风机的流量和压力周期性地反复变化,电流也摆来摆去,也就是说一台风机运行也可能发生喘振,而且是风机低负荷时。而失速通常发生在两台风机并列运行在大负荷时,失速发生时,失速风机风压、风量、振动、风机电机电流等参数突变后不发生波动,这是失速与喘振的最大区别。抢风是失速和喘振的一种通俗性的说法 二、喘振与失速的区别 当风机处于不稳定工作区运行时,可能会出现流量全压的大幅度波动,引起风机及管路系统周期性的剧烈振动,并伴随着强烈的噪声,这种现象叫作喘振。风机在下列条件下才会发生喘振: 1.风机在不稳定工作区运行,且风机工作点落在性能曲线的上升段。 2.风机的管路系统具有较大的容积,并与风机构成一个弹性的空气动力系统。 3.系统内气流周期性波动频率与风机工作整个循环的频率合拍,产生共振。 风机并联运行时,有时会出现一台风机流量特别大,而另一台风机流量特别小的现象,若稍加调节则情况可能刚好相反,原来流量大的反而减小。如此反复下去,使之不能正常并联运行,这种现象称为抢风现象。 从风机性能曲线分析:具有马鞍形性能曲线的风机并联运行时,可能出现“抢风”现象。 所谓抢风,是指并联运行的两台风机,突然一台风机电流(流量)上升,加一台风机电流(流量)下降。此时,若关小大流量风机的调节风门试图平衡风量时,则会使另一台小流量风机跳至最大流量运行。在调整风门投自动时,风机的动叶或静叶频繁地开大、关小,严重时可能导致风机电机超电流而烧坏。 为避免风机出现抢风现象,在低负荷时可以单台运行,当单台风机运行满足不了需要时,再启动第二台参加并联运行。 当冲角增加到某一个临界值时,流体在叶片凸面的流动遭到了破坏,边界层严重分离,阻力大大增加,升力急剧减小。这种现象称为脱流或失速。 在叶轮叶栅上,流体对每个叶片的绕流情况不可能完全一致,因此脱流也不可能在每个叶片上同时产生。一旦某一个或某些叶片上首先产生了脱流,这个脱流就会在整个叶栅上逐个叶片地传播。这种现象称为旋转脱流。
CCC 压缩机防喘振控制技术
CCC 压缩机防喘振控制技术 作者:https://www.360docs.net/doc/004324984.html, 来源:本站发表时间:2010-6-5 17:27:55 点击:68 CCC 压缩机防喘振控制技术 1. 喘振现象 喘振是涡轮压缩机特有的现象,我们可以从下图的简单模型来解释这一特性,从图中可以看出,当容器中压力达到一定值时,压缩机运行点由D 沿性能曲线上升,到喘振点A ,流量减小压力升高,这一过程中流量减小压力升高,由A 点开始到B 点压缩机出现负流量即出现倒流,倒流到一定程度压缩机出口压力下降(B-C),又恢复到正向流动(C-D ),这样,气流在压缩机中来回流动就是喘振,伴随喘振而来的是压缩机振动剧烈上升,类似哮喘病人的巨大异常响声等,如果不能有效控制会给压缩机造成严重的损伤,喘振工况的发展非常快速,一般来讲在1-2 秒内就以发生,因而需要精确的控制算法和快速的控制算法才能实现有效的控制。 2. 喘振控制
通常压缩机都会有一系列的性能曲线图(如下图所示),其坐标是多变压头-入口流量,由于压缩机入口条件的不同(如温度、压力、分子量等)其喘振曲线是分散的多条曲线,给喘振的控制带来困难,CCC 根据压缩机的设计理论、喘振理论和自己的经验,开发出了一套计算方法和软件,可以将多变的入口条件的喘振曲线转化成与入口条件无关的曲线(如下图),这样就可以方便地确定喘振点,而一般来讲压缩机制造厂商提供的性能曲线,是计算值,会有一定偏差,特别是旧机组的性能会发生变化,或者没有性能曲线,为了精确控制,需要对喘振曲线做现场测试,传统的测试方法需要由经验丰富的测试工程师来进行测试,人为地判断压缩机是否到达喘振点,这样做带来了巨大的风险,因为人的判断无法保证100%的准确。而且由于到喘振点时,需要人来手动控制打开防喘振阀,往往会动作滞后或过早打开,难以避免给机组造成损伤或无法实现准确测量,CCC 的喘振算法和控制算法能够在自动状态下测量喘振曲线,从而避免了人为测量的风险,并能准确测量记录线,这一功能是CCC 的专利技术而且是世界独一无二的。
离心式压缩机防喘振控制设计讲解
1 概述 1.1压缩机喘振及其危害 压缩机运行中一个特殊现象就是喘振。防止喘振是压缩机运行中极其重要的问题。许多事实证明,压缩机大量事故都与喘振有关。喘振所以能造成极大的危害,是因为在喘振时气流产生强烈的往复脉冲,来回冲击压缩机转子及其他部件;气流强烈的无规律的震荡引起机组强烈振动,从而造成各种严重后果。喘振会造成转子大轴弯曲;密封损坏,造成严重的漏气,漏油;喘振的出现轻则使压缩机停机,中断生产过程造成经济损失,重则造成压缩机叶片损坏,造成人员伤害;喘振使轴向推力增大,烧坏止推轴瓦;破坏对中与安装质量,使振动加剧;强烈的振动可造成仪表失灵;严重持久的喘振可使转子与静止部分相撞,主轴和隔板断裂,甚至整个压缩机报废。 1.2喘振的工作原理及防治 压缩机在运行中,当管路系统阻力升高时,流量将随之减小,有可能降低到允许值以下。防喘振系统的任务就是在流量降到某一安全下限时,自动地将通大气的放空阀或回流到进口的旁通阀打开,增大经过空压机的流量,防止进入喘振区。取流量安全下限作为调节器的规定值。当流量测量值高于规定值时,放空阀全关:当测量值低于规定值时,调节器输出信号,将放空阀开启,使流量增加。压缩机工作效率高,在正常工况条件下运行平稳,压缩气流无脉动,对其所输送介质的压力、流量、温度变化的敏感性相对较大,容易发生喘振造成严重事故。所以应尽力防止压缩机进入喘振工况。喘振现象是完全可以得到有效控制的,如图(1)所示,根据离心压缩机在不同工况条件下的性能曲线,只要我们把压缩机的最小流量控制在工作区(控制线内),压缩机即可正常工作。喘振的标志是一最小流量点,低于这个流量即出现喘振。因此需要有一个防止压缩机发生喘振的控制系统,限制压缩机的流量不会降低到这种工况下的最低允许值。即不会使压缩机进入喘振工况区域内。
离心式压缩机的防喘振控制
编订:__________________ 审核:__________________ 单位:__________________ 离心式压缩机的防喘振控 制 Deploy The Objectives, Requirements And Methods To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑
文件编号:KG-AO-5913-30 离心式压缩机的防喘振控制 使用备注:本文档可用在日常工作场景,通过对目的、要求、方式、方法、进度等进行具体的部署,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 一、离心式压缩机的特性曲线与喘振 离心式压缩机的特性曲线通常指:出口绝对压力户2与人口绝对压力p1之比(或称压缩比)和入口体积流量的关系曲线;效率和流量或功率和流量之间的关系曲线。对于控制系统的设计而言,则主要用到压缩比和入口体积流量的特性曲线,见图6—20中实线。 离心式压缩机在运行过程中,有可能会出现这样一种现象,即当负荷降低到一定程度时,气体的排出量会出现强烈振荡,同时机身也会剧烈振动,并发出“哮喘”或吼叫声,这种现象就叫做离心式压缩机的“喘振”。 喘振是离心式压缩机的固有特性,而事实上少数离心泵也可能喘振。离心泵工作中产生不稳定工况需要两个条件:一是泵的玎—Q特性曲线呈驼峰状;二
关于风机喘振原因与处理
关于风机喘振原因与处理 喘振,顾名思义就象人哮喘一样,风机出现周期性的出风与倒流,相对来讲轴流式风机更容易发生喘振,严重的喘振会导致风机叶片疲劳损坏,出现喘振的风机大致现象如下: 1 电流减小且频繁摆动、出口风压下降摆动。 2 风机声音异常噪声大、振动大、机壳温度升高、引送风机喘振动使炉膛负压波动燃烧不稳。 常见的原因: 1 烟风道积灰堵塞或烟风道挡板开度不足引起系统阻力过大。(我们有碰到过但不多) 2 两风机并列运行时导叶开度偏差过大使开度小的风机落入喘振区运行(我们常碰到的情况是风机导叶执行机构连杆在升降负荷时脱出,使两风机导叶调节不同步引起大的偏差) 4 风机长期在低出力下运转。 一般的处理原则是调整负荷、关小高出力风机的导叶开度使风机出力相近,再根据上面所说的可能原因进行查找再作相应处理。 所谓喘振,就是当具有“驼峰”形Q-H性能曲线的风机在曲线临界点以左工作时,即在不稳定区工作时,风机的流量和能头在瞬间内发生不稳定的周期性反复变化的现象。风机产生的最大能头将小于管路中的阻耗,流体开始反方向倒流,由管路倒流入风机中(出现负流量),由于风机在继续运行,所以当管路中压力降低时,风机又重新开始输出流量,只要外界需要的流量保持小于临界点流量时,上述过程又重复出现,即发生喘振。 轴流风机性能曲线的左半部具有一个马鞍形的区域,在此区段运行有时会出现风机的流量、压头和功率的大幅度脉动,风机及管道会产生强烈的振动,噪声显著增高等不正常工况,一般称为“喘振”,这一不稳定工况区称为喘振区。实际上,喘振仅仅是不稳定工况区内可能遇到的现象,而在该区域内必然要出现的则是旋转脱流或称旋转失速现象。这两种工况是不同的,但是它们又有一定的关系。象17如下图图所示:轴流风机Q-H性能曲线,若用节流调节方法减少风机的流量,如风机工作点在K点右侧,则风机工作是稳定的。当风机的流量Q < QK时,这时风机所产生的最大压头将随之下降,并小于管路中的压力,因为风道系统容量较大,在这一瞬间风道中的压力仍为HK,因此风道中的压力大于风机所产生的压头使气流开始反方向倒流,由风道倒入风机中,工作点由K点迅速移至C点。但是气流倒流使风道系统中的风量减小,因而风道中压力迅速下降,工作点沿着CD线迅速下降至流量Q=0时的D点,此时风机供给的风量为零。由于风机在继续运转,所以当风道中的压力降低倒相应的D点时,风机又开始输出流量, 为了与风道中压力相平衡,工况点又从D跳至相应工况点F。只要外界所需的流量保持小于QK,上述过程又重复出现。如果风机的工作状态按F-K-C-D-F周而复始地进行,这种循环的频率如与风机系统的振荡频率合拍时,就会引起共振,风机发生了喘振。 风机在喘振区工作时,流量急剧波动,产生气流的撞击,使风机发生强烈的振动,噪声增大,而且风压不断晃动,风机的容量与压头越大,则喘振的危害性越大。故风机产生喘振应具备下述条件: a)风机的工作点落在具有驼峰形Q-H性能曲线的不稳定区域内; b)风道系统具有足够大的容积,它与风机组成一个弹性的空气动力系统; c)整个循环的频率与系统的气流振荡频率合拍时,产生共振。 旋转脱流与喘振的发生都是在Q-H性能曲线左侧的不稳定区域,所以它们是密切相关 轴流风机的Q-H性能曲线 的,但是旋转脱流与喘振有着本质的区别。旋转脱流发生在图5-18所示的风机Q-H性能曲线峰值以左的整个不稳定区域;而喘振只发生在Q-H性能曲线向右上方倾斜部分。旋转
PLC 在压缩机防喘振控制系统中的应用
PLC在压缩机防喘振控制系统中的应用 前言 抚顺乙烯化工有限公司空分装置空压机防喘振控制系统原来采用FOXBORO盘前二次表来实现,并采用继电器实现其相关联锁逻辑功能,实现手段不仅落后,维护工作量大,而且还经常出现原因不明的意外停车,防喘振控制系统运行也不理想。该装置原控制系统发生爆炸事故之后,现在采用美国GE-Fanuc公司的90-30双机热备型PLC来实现空压机的防喘振功能和机组联锁保护,使用日本Digital公司的GP-470触摸屏来实现监视和操作功能。现在不仅操作直观方便、停车原因明确,也使空压机的防喘振系统设计更加完善,机组运行更加平稳。 空压机工艺简介 抚顺乙烯空分装置采用法国空气液化公司的专利,该装置以空气为原料,经过过滤、压缩、净化、精馏、蒸发等工序,最后分离出产品氧气和产品氮气。吸入的原料空气经过滤后除去灰尘和杂质,过滤后的空气由空气压缩机K601进行压缩,加压后送往下游净化岗位。空压机K601系离心式压缩机,由电机带动,分两级压缩,两级分置于电机两侧即K601A和K601B。空压机K601设计流量为31500 Nm3/h,功率为3200kw,转速为1450rpm,由法国苏尔寿(SULZER)公司制造。 喘振现象的产生 压缩机在工作过程中,当入叶轮的气体流量小于机组该工况下的最小流量(即喘振流量)限时,管网气体会倒流至压缩机,当压缩机的出口压力大于管网压力时,压缩机又开始排出气体,气流会在系统中产生周期性的振荡,具体体现在机组连同它的外围管道一起会作周期性大幅度的振动,这种现象工程上称之为喘振。 喘振是离心式压缩机的固有特性,当发生喘振时需采取措施降低出口压力或增大入口流量,尽量降低喘振时间。为了确保压缩机稳定可靠地工作,防止用量波动发生喘振,该装置设计了防喘振放空阀,当下游工艺设备空气用量减少或压缩机出现喘振时,可由放空阀减量放空来平衡。 防喘振方案的实施 防喘振控制系统描述 1.系统结构 本系统采用GE Fanuc 90-30 PLC 作数据采集和控制,为了保证系统的可靠性,控制部分采用双机热备结构,电源、CPU、通讯模块和通讯总线、以太网通讯模块等都是冗余的,通过
高炉风机防喘振先进控制技术
高炉风机防喘振先进控制技术 高炉鼓风机是炼铁过程中的核心动力设备,对于整个钢铁企业而言,鼓风机的运行状态与企业的产量、效益、安全息息相关,防喘振控制作为高炉风机控制中最重要的一环,其控制效果完善与否,在很大程度上决定了能否充分发挥鼓风机的潜能,为高炉提供一个安全、稳定、高效的风源,保证高炉达到理想的利用系数。 一、目前在炼铁行业高炉风机防喘振控制技术中普遍存在的问题 1.“保风机”与“保高炉”之间的矛盾: 在防喘振控制回路中,由于缺少完备的数学算法,在工况点接近喘振线时,“保风机”和“保高炉”往往成为一对不可调和的矛盾。防喘振动作的速度主要由调节器的增益值来决定,在调试过程中,往往对增益值如何设定感到两为其难:如增大数值,防喘振阀在动作时打开得过快、过大势必会产生较大的流量和压力波动,这种波动是高炉正常生产中无法接受的。如减小数值,又不能保证在工况点上升较快的情况下保证风机不进入喘振区。产生这一矛盾根本的原因是防喘振控制回路设计的出发点是保护风机本体,对如何在保护风机的同时又保护高炉的正常生产缺少必要的考虑。目前普遍应用的防喘振控制效果的现实情况是:一旦工况点越过防喘振线,防喘振阀进行调节动作,工况点在2~3秒钟内由接近喘振区域被向下拉至距离防喘线以下,风机出口压力的波动至少会超过40kPa,在高炉憋压比较突然的情况下,压力的波动甚至可能达到100~150kPa,这样幅度的波动远远超过了高炉操作所允许的范围。一般来说,导致来自高炉的阻力增大、风机工况接近喘振线的原因可能是以下几种:在热风炉切换的过程中操作不慎、高炉炉料下落、炉顶煤气压力控制不稳等,这些原因都可能导致炉料料层透气性下降、高炉工况恶化。从维持高炉工况的角度出发,在这种情况下,最需要的就是高炉风机能够保证稳定的送风压力,使高炉工况得以好转,而由于防喘振控制的局限性,往往恰是在这一时候,供风压力最不稳定,导致和加剧了高炉座料,而高炉工况一旦变坏后往往需要几天的时间才能逐渐恢复,由此给炼铁企业造成巨大的经济损失。 2.AV系列轴流风机尚未发挥出最大效益: 由于目前普遍应用的防喘振控制过分侧重于风机本身,使AV(静叶可调式)系列轴流风机无法在最大工况点上稳定工作。工况点一旦达到或越过防喘振线,防喘阀就会在调节器的作用
风机喘振、失速、抢风区别
附件:轴流风机“失速”、“喘振”、“抢风”区别 1)轴流风机失速 轴流风机叶片通常都是流线型的,设计工况下运行时,气流冲角(即进口气流相对速度w的方向与叶片安装角之差)约为零,气流阻力小,风机效率高。当风机流量减小时,w的方向角改变,气流冲角增大。当冲角增大到某一临界值时,叶背尾端产生涡流区,即所谓的脱流工况(失速),阻力急剧增加,而升力(压力)迅速降低;冲角再增大,脱流现象更为严重,甚至会出现部分叶道阻塞的情况。 由于风机各叶片存在安装误差,安装角不完全一致,气流流场不均匀相等。因此,失速现象并不是所有叶片同时发生,而是首先在一个或几个叶片出现。若在叶道2中出现脱流,叶道由于受脱流区的排挤变窄,流量减小,则气流分别进入相邻的1、3叶道,使1、3叶道的气流方向改变。结果使流入叶道1的气流冲角减小,叶道1保持正常流动;叶道3的冲角增大,加剧了脱流和阻塞。叶道3的阻塞同理又影响相邻叶道2和4的气流,使叶道2消除脱硫,同时引发叶道4出现脱流。也就是说,脱流区是旋转的,其旋转方向与叶轮旋转方向相反。这种现象称为旋转失速。 与喘振不同,旋转失速时风机可以继续运行,但它引起叶片振动和叶轮前压力的大幅度脉动,往往是造成叶片疲劳损坏的重要原因。从风机的特性曲线来看,旋转失速区与喘振区一样都位于马鞍型峰值点左边的低风量区。为了避免风机落入失速区工作,在锅炉点火及低负荷期间,可采用单台风机运行,以提高风机流量。
2)轴流风机喘振 风机的喘振,是指风机在不稳定区工况运行时,引起风量、压力、电流的大幅度脉动,噪音增加、风机和管道剧烈振动的现象。现以单台风机为例,配合上图加以说明。 当风机在曲线的单向下降部分工作时,其工作是稳定的,一直到工作点K。但当风机负荷降到低于Qk时,进入不稳定区工作。此时,只要有微小扰动使管路压力稍稍升高,则由于风机流量大于管路流量(Qk>QG),工作点向右移动至A点,当管路压力PA超过风机正向输送的最大压力Pk时,工作点即改变到B点,(A、B点等压),风机抵抗管路压力产生的倒流而做功。此时,管路中的气体向两个方向输送,一方面供给负荷需要,一方面倒送给风机,故压力迅速降低。至C点时停止倒流,风机流量增加。但由于风机的流量仍小于管路流量,QC<QD,所以管路压力仍下降至E点,风同的工作点将瞬间由E点跳到F点(E、F点等压),此时风机输出流量为QF。由于QF大于管路的输出流量,此时管路风压转而升高,风机的工作点又移到K点。上述过程重复进行,就形成了风机的喘振。喘振时,风机的流量在QB-QF范围内变化,而管路的输出流量只在少得多的QE -QA间变动。 所以,只要运行中工作点不进入上述不稳定区,就可避免风机喘振。轴流风机当动叶安装角改变时,K点也相应变动。因此,不同的动叶安装角度下对应的不稳定区是不同的。大型机组一般设计了风机的喘振报警装置。其原理是,将动叶或静叶各角度对应的性能曲线峰值点平滑连接,形成该风机喘振边界线,(如下图所示),再将该喘振边界线向右下方移动一定距离,得到喘振报警线。为保证风机的可靠运行,其工作点必须在喘振边界线的右下方。一旦在某一角度下的