继电接触器控制系统
第10章继电接触器控制
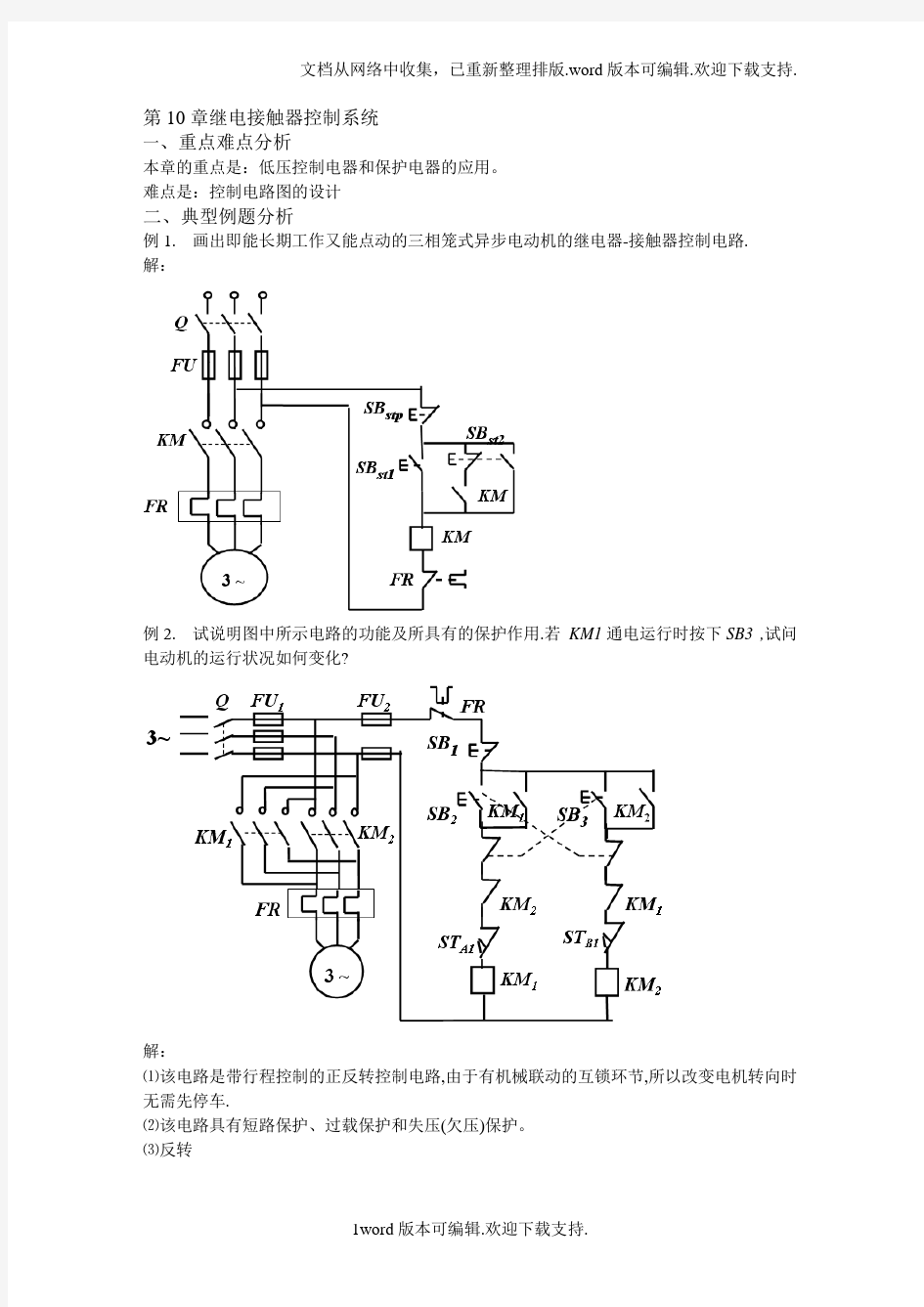
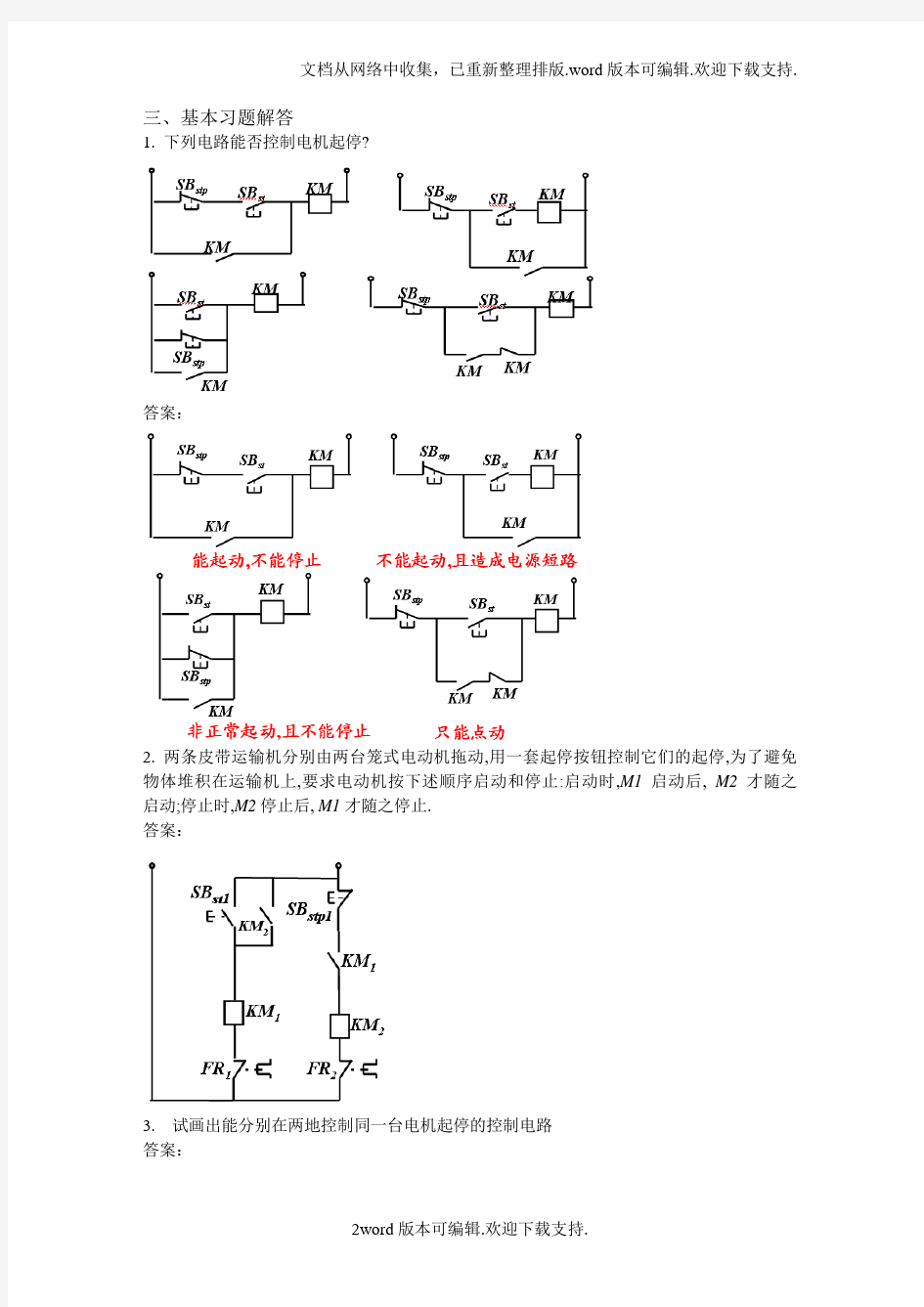
第10章 继电接触器控制 10.1 刀开关与组合开关有何异同? 解 相同之处:两者都是手动电器,主要在不频繁操作的低压电路中用作接通或切断电路、换接电源、控制小型鼠笼式三相异步电动机的直接起动与停机等。 不同之处:与刀开关相比,组合开关具有体积小、使用方便、通断电路能力强等优点。 10.2 按钮与开关的作用有何差别? 解 按钮是一种发出指令的电器,主要用于远距离操作继电器、接触器接通或断开控制电路,从而控制电动机或其他电气设备的运行。开关在不频繁操作的低压电路中用作接通或切断电路、换接电源、控制小型鼠笼式三相异步电动机的直接起动与停机等。 10.3 熔断器有何用途?如何选择? 解 熔断器主要用作短路保护,串联在被保护的线路中。线路正常工作时,熔断器如同一根导线,起通路作用;当线路短路或严重过载时,电流大大超过额定值,熔断器中的熔体迅速熔断,从而起到保护线路上其他电器设备的作用。 选择熔断器,主要是选择熔体的额定电流。选择熔体额定电流的方法如下: (1)电灯支线的熔体:熔体额定电流≥支线上所有电灯的工作电流之和。 (2)一台电动机的熔体:熔体额定电流≥5 .2电动机的起动电流。 如果电动机起动频繁,则为:熔体额定电流≥2 ~6.1电动机的起动电流。 (3)几台电动机合用的总熔体:熔体额定电流?=)5.2~5.1(容量最大的电动机的额定电流之和其余电动机的额定电流+。 10.4 交流接触器有何用途?主要由哪几部分组成?各起什么作用? 解 交流接触器用于远距离频繁接通、切断电动机或其它负载的主电路。交流接触器主要由电磁机构、触点系统和灭弧装置3部分组成。电磁机构实际上是一个电磁铁,包括吸引线圈、铁心和衔铁,电磁铁的线圈通电时,产生电磁吸引力,将衔铁吸下,使常开触点闭合,常闭触点断开,电磁铁的线圈断电后,电磁吸引力消失,依靠弹簧使触点恢复到初始状态。触点用以接通或断开电路,由动触点、静触点和弹簧组成。灭弧装置用以熄灭由于主触点断开而产生的电弧,防止烧坏触点。 10.5 简述热继电器的主要结构和动作原理。 解 热继电器是利用电流的热效应原理工作的保护电器,在电路中用作三相异步电动机的过载保护。热继电器利用感温元件受热产生的机械变形推动机构动作来开闭
第10章 继电接触器控制系统例题
原位 终点 前进 后退 A ST a ST b KM R SB R KM F FR KM F SB 1 KM F SB F KM R KM R ST a ST b ST b 主电路为电机的正反转电路,分析此电路实现的功能。 例1
KM R SB R KM F SB 1 KM F SB F KM R KM R ST a b ST b (1)A 在原位时: A 在原位,压下ST a KM R 线圈断电 电机不能反转按下SB F KM F 线圈通电,并自锁 电机正转 带动A 前进 起动后只能前进,不能后退。
KM R SB R KM F SB 1 KM F SB F KM R KM R ST a b ST b (2)A 前进到终点时: 立即后退,退回到原位自动停。A 到达终点,压下ST b 常闭触点断开 KM F 线圈断电电机反转 带动A 后退 常开触点闭合KM R 线圈通电A 后退到原位压下ST a KM R 线圈断电 电机停转 A 停在原位
(3)A 在途中时: 可停车;再起动时,既可前进也可后退。KM R SB R KM F SB 1 KM F SB F KM R KM R ST a b ST b A 在途中,按下S B 1 线圈都断电 电机停车 A 停在途中。再起动时,因A 在途中:ST a 和ST b 均不受压; 按下SB F A 前进 按下SB R A 后退
(4)A 在途中时,若暂时停电,复电时,A 不会自行运动。 A 在运行途中,如果停电?线圈要断电?各触点恢复常态?再通电时,A 不会自行运动。 KM R SB R KM F SB 1 KM F SB F KM R KM R ST a b ST b
第10章 继电接触器控制系统
第十章继电接触器控制系统 ★主要内容 1、常用控制器 2、鼠笼式电动机直接超支的控制线路 3、鼠笼式电动机正反转的控制线路 4、行程控制 5、时间控制 ★教学目的和要求 1、了解常用低压电器的结构、功能和符号。 2、掌握继电接触器控制电路的自锁、联锁以及行程、时间等控制。 3、了解过载、短路和失压保护的方法。 4、能读懂简单的控制电路原理图,能连线操作,并能进行简单电路的设计。★学时数:4学时 ★重难点 重点:常用低压电器的功能和符号,直接起动控制线路及自锁,正反转控制线路及联接,顺序起动、行程控制电路,控制电路中的过载、短路和失压保护。难点:行程、时间等控制,根据电路原理图连线操作,控制电路的设计。 ★本章作业布置: 课本习题P286—288页,10.2.3,10.3.1,10.4.2,10.5.1
第十章 继电接触器控制系统 对电动机的控制(起动、正反转、调速和制动等),当前国内还较多地采用继电器、接触器和按钮等控制电器来实现。本章主要介绍异步电动机控制的一些基本控制电路以及常用的低压控制器。 §10.1 常用控制电器 按动作性质分:手动电器和自动电器。手动电器是由工作人员手动操作的。例如:闸刀开关、组合开关、按钮等。而自动电器则按照指令、信号或某个物理变化而自动动作的。如:各种继电器、接触器、行程开关等。 1. 组合开关 在机床电气控制线路中,组合开关常用来作为电源引入开关,也可以用它来直接起动和停止小容量鼠笼式电动机或使电动机反转。 组合开关常用HZ10系列,其结构如图10.1-1所示,它有三对静片和三对动片,转动手柄可将三个开关同时接通或断开。图10.1-2是用组合开关起动和停止异步电动机的接线图。 组合开关有单极、双极、三极、四极等,其符号如图10.1-3所示。 手柄转轴 弹簧 凸轮 绝缘垫板动触片 静触片 接线柱 绝缘杆 三极 图10.1-1 图10.1-2 图10.1-3 2. 按钮 图10.1-5 图10.1-4
继电器接触器控制系统的设计.
第二节继电器接触器控制系统的设计 电器控制线路的设计方法:经念设计法 逻辑设计法 经验设计法(一般设计法):根据生产工艺要求,利用各种典型的线路环节,直接设计控制线路。 一、控制系统的工艺要求 试设计龙门刨床的横梁升降控制系统。 横粱机构对电器控制系统的要求: 1、保证横梁能上下移动,夹紧机构能实现横梁夹紧或放松; 2、横梁夹紧与横梁移动之间必须按一定的顺序操作:当横梁上下移动时,应能自动按照放松横梁→横梁上下移动→夹紧横梁→夹紧电机自动停止运动的顺序动作; 3、横梁在上升与下降时应有限位保护;
4、横梁夹紧与横梁移动之间及正反向之间应有必要的联锁。 二、控制线路设计步骤 1、设计主电路 横梁升降:横梁升降电动机Ml ——正反转(KMl、KM2) 夹紧放松电动机M2 ——正反转(KM3、KM4) 2、设计基本控制电路 横梁移动为点动控制,通过两个中间继电器KA1和KA2实现。 3、选择控制参量,确定控制方案 横梁放松:行程开关SQ1 横梁夹紧:电流继电器KI 横梁夹紧可以用时间、行程和反映夹紧力的电流作为变化参量采用行程参量,当夹紧机构磨损后,测量就不精确,如用时间参量,更不易调整准确,
所以选用电流参量进行控制为好,其动作电流整定在额定电流的两倍左右。 当横粱移动停止,如上升停止,点动按钮SB1松开(行程开关SQ1压合)KM3得电,夹紧电机立即自动起动。当夹紧力电流达到KI的整定值时,KM3失电,自动停止夹紧电动机的工作。 4.设计联锁保护环节 KAl、KA2常闭触点实现横梁移动电机和夹紧电机正反向工作的联锁保护。 5、横梁上下的限位保护 行程开关SQ2和SQ3分别实现向上或向下限位保护。 SQ1除了反映放松信号外,还起到了横梁移动和横梁夹紧间的联锁控制。 6、线路的完善和校核
常用继电器-接触器控制电路解析
常用继电器-接触器控制电路解析 1.利用速度继电器对三相异步电动机反接制动 原理:SB2按下→KM1有电且自锁→电机全压启动,转速很快达到120r/min,此时速度继电器触点动作,为反接制动做好准备→当SB1按下→KM1失电,同时KM2得电并自锁保持,串接制动电阻R反接制动(将电流消耗到电阻R上)→转速迅速下降,当转速小于100r/min时,速度继电器的触点复位→切断KM2,使其失电,制动过程结束。 2.三相异步电动机Y-?起动 原理:SB1(起动按钮)按下→KM1得电并且自锁,同时时间继电器KT得电(开始计时),KM3得电→KM1,KM3得电,三相异步电动机接成Y型起动→当设定的时间到达后,延时继电器KT的延时断开触点使KM3失电,延时继电器KT的延时接通触点使KM2得电→此时KM1得电,KM2得电,KM3失电→三相异步电动机接成?起动。
3.定子串电阻降压启动 原理:SB1按下→KM2得电,并且自锁,同时时间继电器,KT得电开始计时→KM2得电,定子串接电阻R降压启动→当设定的时间到后,KT的延时接通触点使KM1得电,并且自锁→KM1得电,在主电路中相当于短接了电阻R,三相异步电动机全压运行。 4.自耦变压器降压启动(带指示灯) 原理:SB2按下→KM1得电并且自锁,同时KT得电(开始计时)→KM1有电,在主电路中,自耦变压器抽头降压启动→当设定时间到后,延时继电器常开触点闭合,中间继电器K得电并自锁→使得KM1断电,KM2得电→三相异步电动机全压工作。 控制电路中的变压器使指示灯工作在安全电压下(一般,交流36V)→HL3为上电指示灯(K和KM1均不得电);HL2为降压启动指示灯(K失电,但KM1得电);HL3为全压工作指示灯(KM2得电)。
电机拖动控制(机电传动控制)6--继电器—接触器控制系统
? 第六章 继电器接触器控制
第六章 继电器接触器控制
? 主要内容: ? 6.1常用低压电器 ? 6.2电气原理图 ? 6.3三相异步电动机基本控制线路 ? 6.4其他常用基本控制线路 ? 6.5自动循环工作控制线路
第六章 继电器接触器控制
学习要求: ? 熟悉各种电器的工作原理、作用、特点、应 用场所和表示符号;
? 掌握继电器接触器控制电路中基本控制 环节和常用的几种自动控制方式;
? 学会设计一些简单的继电器接触器控制电路。
电力拖动控制是指对电动机的起动、调速、 停止、反转、制动等过程所实施的控制。可按 作用方式分为手动控制与自动控制。
? 手动控制:用闸刀、转换开关等手控电器来实 现电动机传动控制。
? 自动控制:用自动电器来实现电力拖动控制, 控制系统也向无触点连续控制、微机控制发展, 但由于继电器—接触器所用的控制电器结构简 单价格便宜,对小型机床、老机床的改进中也 还是很重要,本章,主要介绍最常用的控制电 器与执行电器,在此基础上,分析继电器—接 触器的基本路线。
6.1 常用控制电器与执行电器
1.概念 ☆控制电器(用于生产机械中)多属低
压电器,U <500V
☆用来接通或断开电路,以及用来控制、 调节和保护用电设备的电气器具。
2.分类
ぬ电器按动作性质可分为以下两类。
? (1)非自动电器:这类电器没有动力 机构,依靠人力或其他外力来接通或切断电路, 如:刀开关、转换开关、行程开关等。
? (2)自动电器:这类电器有电磁铁等 动力机构,按照指令、信号或参数变化而自动 动作,是工作电路接通和切断,如:接触器、 继电器、自动开关等。
继电接触器控制系统概念题(自学题)
继电器接触器控制电路概念题 1. 在电动机的继电器接触器控制电路中,零压保护的功能是( )。 (a) 防止电源电压降低烧坏电动机 (b)防止停电后再恢复供电时电动机自行起动 (c) 实现短路保护 2. 在电动机的继电器接触器控制电路中,热继电器的功能是实现( )。 (a)短路保护(b)零压保护(c)过载保护 3. 在三相异步电动机的正反转控制电路中,正转接触器与反转接触器间 的互锁环节功能是( )。 (a)防止电动机同时正转和反转(b)防止误操作时电源短路 (c)实现电动机过载保护 4. 在电动机的继电器接触器控制电路中,自锁环节的功能是( )。 (a) 具有零压保护(b)保证起动后持续运行(c)兼有点动功能 5. 为使某工作台在固定的区间作往复运动,并能防止其冲出滑道,应当采 用( )。 (a)时间控制(b)速度控制和终端保护(c) 行程控制和终端保护 6. 在电动机的继电器接触器控制电路中,热继电器的正确连接方法应 当是( )。 (a)热继电器的发热元件串接在主电路内,而把它的动合触点与接触器 的线圈串联接在控制电路内 (b) 热继电器的发热元件串联接在主电路内,而把它的动断触点与接触 器的线圈串联接在控制电路内 (c) 热继电器的发热元件并接在主电路内,而把它的动断触点与接触器 的线圈并联接在控制电路内 7. 在继电器接触器控制电路中,自锁环节触点的正确连接方法是( )。 (a) 接触器的动合辅助触点与起动按钮并联 (b) 接触器的动合辅助触点与起动按钮串联 (c) 接触器的动断辅助触点与起动按钮并联 [1.b 2. c 3 b 4. b 5.c 6. b 7. a ]
实验5继电器接触器控制电路.(DOC)
实验五继电器接触器控制电路 一、实验目的 1、了解三相异步电动机的结构,熟悉其使用方法; 2、了解基本控制电器的主要结构和动作原理,掌握其在控制电路中的作用; 3、掌握几种典型控制环节。 4、培养连接、检查和操作控制电路的能力。 二、预习要求 1、预习有关低压电器和继电接触控制的有关知识。 2、看懂电动机的正反转控制电路,了解各触点及其它元件的作用。 3、了解实验设备、低压电器型号及使用方法。 三、实验内容及步骤 1、三相异步电动机的认识与检查 (1)从外观上熟悉三相异步电动机的基本结构形式;观察电动机上的铭牌数据;根据实验室电源等级,判断电动机的额定接线方法应是△形接法还是Y形接法。 (2)观察和熟悉接触器、热继电器、时间继电器、按钮等电器的主要结构,分清各种触点、控制线圈、发热元件的接线插孔及面板符号。 2、三相异步电动机的直接启动控制 (1)图5-1为电动机直接启动电路图,按图接线。先接主回路,后接控制电路。 (2)检查接线是否有误,对照原理图,按接线顺序复查一遍。检查无误后,合上电源刀闸开关Q,按下启动按钮SB2,待电机达到稳定转速后,按动SB1停车,观察接触器和电机的工作情况。如果发现电动机或接触器声音异常,应立即关闭总电源,然后分析故障原因。 3、三相异步电动机的正、反转控制 按图5-2所示接好实验控制线路图,检查方法同上。一定要确保主电路正确无误,然后才可合闸实验。依次按下正转、停止、反转、停止按钮,观察接触器的工作情况和电动机转向的变化。
4、在实验3的基础上加机械互锁,实现不停车可以直接反转。 5、设计型实验(选做)——三相异步电动机的周期性往复启停控制 画出主电路和控制电路,交与老师审查后方可进行实验。 控制功能要求:一台三相异步电动机,按启动按钮电机启动,转动5s后自动停止,停止7s后又自动启动,如此反复运行,直到手动停止为止。用一个60W/220V的灯泡指示电机的运行。 四、注意事项 1、首先要认清接线板上线圈、触点的符号和端子,再进行接线,以防短路; 2、必须遵守“先接线,后合闸”和“先拉闸,后接线”的安全操作规则; 3、启动电动机时,密切注视电动机工作是否正常,若发现电动机有“嗡嗡”声或不转等异常现象,应马上拉闸,排除故障。 五、实验报告要求 1、画好三相异步电动机正反转控制线路图,并简述工作原理。 2、简述交流接触器及热继电器的工作原理。 3、画出实验中故障现象的原理图,并分析故障原因及排除方法。 六、预习思考题 1、主电路的短路、过载和失压三种保护功能是如何得到的,在实际运行中这三种保护功能有什么意义? 2、主电路中熔断器、热继电器是否可以采用任一种就能起到短路及过载保护作用,为什么? 3、在电路中,如果缺少一个作自锁作用的触头,你能想法代替吗?画出这时的控制电路图,但需指出它存在的缺点。 (注:素材和资料部分来自网络,供参考。请预览后才下载,期待你的好评与关注!)
继电接触器控制电路实验
继电接触器控制电路实验 一、实验目的 1.本实验为设计性实验,通过实验了解常用低压电器的功能,熟悉一些最基本的控制线路和构成原理。 2.根据生产工艺要求,设计控制方案并在实验装置上实现。 二、设计任务和要求 1.卧铣床主轴电机控制系统 (1)控制对象:有两台三相异步电动机,M1拖动一个油泵,作为机床润滑系统 的动力,单向运转即可;M2为主轴电机,要求能正反转运行。 (2)控制要求:整个系统只有Ml起动后,M2才可能起动;要停车时,只有 M2先停车,Ml才可能停转,即实现顺序控制。M2具有正反转功能,正反转的转换不可直接进行,必须先停车,再反转。M2的每次起动(不论正转或反转)都采用Y—Δ起动。而Y—Δ起动是由时间继电器(设定延时时间为5s)自动转换的。 三、实验设备 表8-1 实验设备表 四、提示 1.设计思路 卧铣床主轴电机控制系统。用四只交流接触器分别控制正、反转及Y接Δ接。若某接触器(如KM l正转)的辅助触头不够用,可选择与其功能相同的接触器触头来代用(如KM4三角接法接触器)。 2.简要说明 设计继电控制系统时,首先要了解课题(即生产工艺)对控制系统的要求,还要了解生产设备的结构、工作环境和操作人员的要求等。在进行具体线路设计时,一般先设计主电路,然后设计控制电路、信号电路及局部照明电路等。初步设计完成后,应仔细检查线路是否符合设计要求,并尽可能使之完善与简化,最后进行电器型号和规格的选择。 继电器控制系统的一般设计方法: (1)能满足生产机械的工艺要求,按照工艺的顺序准确而可靠地工作。 (2)线路力求简单,正确合理地选用各种电器。 (3)操作、调整和检查方便。