使用泰克MSO4000示波器测试与分析CAN总线信号
主题TOPIC —————————————————————————————————TITLE:使用泰克MSO4000示波器测试与分析CAN总线信号
OBJET :介绍了泰克MSO4000系列示波器在CAN网测试中的若干应用
目录
1目的 (3)
2适用范围 (3)
3参考文件 (3)
4历史 (3)
5泰克MSO4000示波器简介 (4)
6利用MSO4000示波器对CAN LS信号进行采集和解码 (4)
6.1 对示波器进行设置 (4)
6.2 监测CAN LS网络上的CAN_H和CAN_L电平信号 (5)
6.3 技术规范对CAN LS信号电平值的规定 (8)
6.4 监测CAN LS网络的总线解码信号 (9)
7利用MSO4000示波器对CAN HS信号进行采集和解码 (10)
7.1 对示波器进行设置 (10)
7.2 监测CAN HS网络上的CAN_H和CAN_L电平信号 (10)
7.3 技术规范对CAN HS信号电平值的规定 (11)
7.4 监测CAN HS网络的总线解码信号 (11)
8使用泰克“e﹡Scope”功能对示波器进行远程操作 (12)
9使用Open Choice软件自动获取示波器屏幕截图 (13)
10使用SignalExpress TE软件实现自动化测试 (15)
2 of Page 19
1 目的
CAN网络信号的测试包括总新电平信号的采集、电压值的测量、信号解码分析、总线通讯状态监测等内容,这部分内容也是构成CAN网络底层测试的基础,测试结果的正确与否,直接关系到整车电器架构的稳定性与电控单元功能的完好性,因此如何便捷高效地完成CAN网络的测试,已经成为整车验证环节中不可回避的一个话题。本文中提出了一套使用泰克MSO4000系列示波器与配套的LabVIEW SignalExpress TE软件进行CAN总线信号测试与分析的方法,从而完成整车高速、低速CAN网络信号的分析与测试工作。通过“示波器+PC软件”的方式,测试人员可以方便快捷地对总线信号进行实时监测,也可以使用示波器的解码功能直接观测到对应的逻辑信号。在使用附属的SignalExpress TE软件后,还可以实现远程测试、自动化测试等功能,与其它测试和分析方法相比,具有入门简单、适用范围广、数据采集精度高等优点,大大提高了基于CAN总线技术的电控单元的开发与测试效率。
2 适用范围
供新车型项目中进行CAN网底层测试时参考使用。
3 参考文件
4 历史
5 泰克MSO4000示波器简介
MSO4000系列示波器是美国的泰克(Tektronix) 公司于2007年推出的混合信号示波器,本文中应用到其系列下的MSO4054型(参见图1),包含4个模拟通道和16个数字通道,带宽为500 MHz,采样率为2.5GS/s,存储深度达到10M,配合示波器上的DPO4AUTO型汽车串行触发和分析模块,完全可以对高速、低速CAN网信号进行检测和解码分析。
图1泰克MSO4054混合信号示波器
6 利用MSO4000示波器对CAN LS信号进行采集和解码
6.1 对示波器进行设置
CAN LS (CAN Low Speed)是对所有低传输速率CAN网络的统称,PSA的AEE2004电器架构中,CAN-CONF网络(舒适网)即属于这种网络,网络中包含的主要是组合仪表、收放机、多碟CD等电控单元,典型的数据传输速率为125Kbps。
如果现在需要监测CAN-CONF网络上由BSI(智能伺服盒)发出的信息帧ID_ COMMANDES_BSI(ID = 0x36),观测其物理电平值并测试示波器的CAN总线解码功能,设定Channel 2监测CAN_H,Channel 3监测CAN_L,并利用Channel 3的CAN_L信号实现解码,探头的GND可直接接到电源的地。其它设置如下所示:
(1)短按【自动设置】,清除掉示波器原有的各项设置。
(2)分别旋转Channel 3和Channel 2的“标度”旋钮,使得垂直方向上电压的标度为5.00V/div;旋转“水平”区域的“标度”按钮,调整信号的周期为100us。
(3)短按【采样】,设置如下:
[模式] = “采样”
[记录长度] = “100k”
[延迟] = “开启”
(4)短按示波器Channel 3探头上方的【3】键,设置如下:
[耦合] = “直流”
[阻抗] = “1MΩ”
[反相] = “关闭”
[带宽] = “全带宽”
[(3)标签] = 输入“CAN_Low”
(5)短按示波器Channel 2探头上方的【2】键,设置如下:
[耦合] = “直流”
[阻抗] = “1MΩ”
[反相] = “关闭”
[带宽] = “全带宽”
[(3)标签] = 输入“CAN_High”
(6)短按【菜单】按键,设置如下:
[类型] = “总线”
[信号源总线] = “B1(CAN)”
[触发打开] = “标识符”
[标识符] = 设置为036h(或CAN LS网络上的其它信息帧)
[方向] = “读或写”
[模式] = “自动触发&释放”
(6)短按总线区域的【B1】按键,设置如下:
[总线(B1)] = “CAN”
[定义输入]:[CAN输入] = “3”,[信号类型] = “CAN_L”,[取样点] = “50%”
[阈值]:[CAN_L(3)阈值] = “2.5V”
[位速率] = 125000
[总线显示] = “总线和波形”,“十六进制”
通过以上设置即可完成设置,示波器屏幕上会显示出CAN_H、CAN_L的电平信号及通过CAN_L解码后的数字波形。
6.2 监测CAN LS网络上的CAN_H和CAN_L电平信号
旋转Channel 2的“标度”旋钮,使得垂直方向上电压的标度为2.00V/div,再短按【B1】按键暂时关闭总线解码功能,只在屏幕上保留Channel 2显示的CAN_H电平信号。连续短按两次光标按键,以测量CAN_H上的显性位和隐形位的电平值,测量结果如下:
(1)CAN_H显形位(即二进制位的“0”)的电平为0.28V,波形图如下所示:
(2)CAN_H隐性位(即二进制位的“1”)的电平为3.68V。波形图如下所示:
图3 CAN_H隐性位电平(CAN LS网络)
旋转Channel 3的“标度”旋钮,使得垂直方向上电压的标度为2.00V/div,再短按【2】按键
暂时关闭CAN_H信号显示,只在屏幕上保留Channel 2显示的CAN_L信号。分切测试其显性位、
隐性位的电平值,结果如下:
(1)CAN_L显性位(即二进制位的“0”)的电平为1.36V,波形如图4所示;
图4CAN_L显性位电平(CAN LS网络)
(2)CAN_L隐性位(即二进制位的“1”)的电平为4.88V,波形如图5所示:
图5CAN_L隐性位电平(CAN LS网络)
如果在屏幕上同时调出CAN_H、CAN_L电平信号,会发现它们的相位正好完全相反,但是电平值并不相同。ECU会对两条总线上的电平值进行差分运算,从而判断当前总线上发送的数据究竟是“0”(显性位)还是“1”(隐性位)。
图6CAN_H和CAN_L电平信号(CAN LS网络)
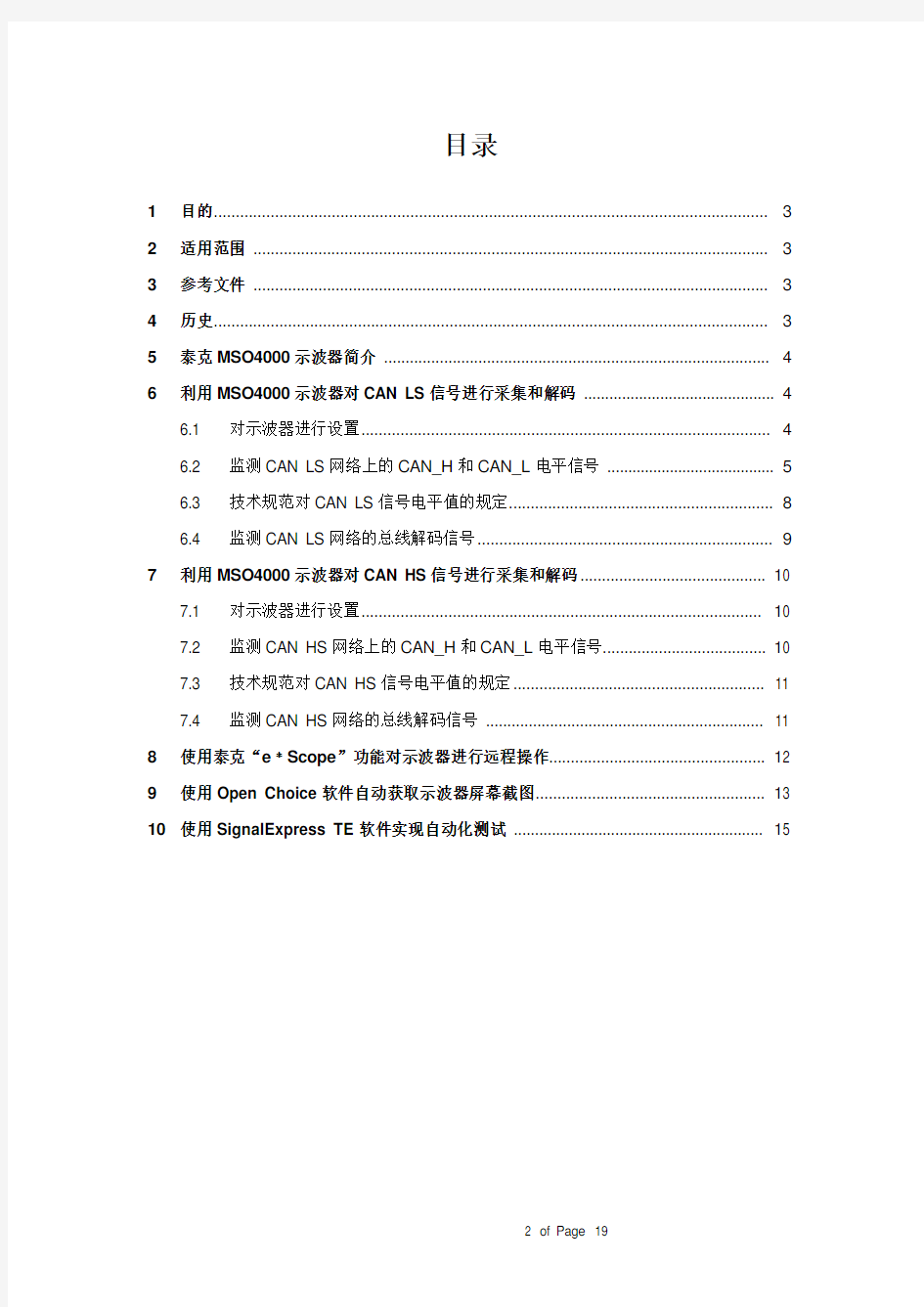
6.3 技术规范对CAN LS信号电平值的规定
PSA技术规范中对于低速网(CAN LS,CAN Low Speed)有相关规定,只有在总线信号的物理电平值满足如下条件时,CAN_H和CAN_L两条总线上的电平值才能进行正确的差分运算,并得到正确的解码结果:
“0”(显性位)“1”(隐性位)CAN_H≤0.2V ≤3.6V
CAN_L ≤1.4V≥4.8V
表1PSA对于CAN LS网络上的信号物理电平值的规定
也可参考图7所示:
图7 CAN LS 网络上的CAN_H 和CAN_L 电平值
分析前面的测试结果,可以发现监测到的物理电平值是符合相关技术规范的。
6.4 监测CAN LS 网络的总线解码信号
在MS04000示波器配有DPO4AUTO 分析模块的情况下,还可以利用示波器对总线信号实施解码操作,从而直接在示波器上观测到总线逻辑信号(即显性位“0”和隐形位“1”),调整电平信号的周期为100us 左右,示波器即可显示对应的波形和数据。如图8即截取了一段总线解码后得到的CAN 数据场信息,该信息由二进制数据和对应的波形构成,在时域上与CAN_H 、CAN_L 电平值完全对应。同时这里还可以监测到CAN 总线的位填充特性。CAN 协议规定,为了防止一帧信息中有太多相同电平的位而造成同步丢失,在五个连续相等位后,总线上会自动插入一个互补的补码位。
图8 CAN LS 网络上的总线解码信号
t 2.5 V
5 V
7 利用MSO4000示波器对CAN HS信号进行采集和解码
CAN HS网络(CAN High Speed)的数据传输速率比CAN LS网络要大很多,例如PSA的AEE2004电器架构中,CAN-I/S(CAN - INTER SYSTEME)网络就属于典型的CAN HS网络,CAN-I/S网络中包含的主要是变速箱、发动机控制盒等一系列电控单元,要求数据的实时交换速率较高,因此该网络典型的数据传输速率达到500Kbps。
7.1 对示波器进行设置
与前文中监测CAN LS网络上的信号一样,此处依然设定Channel 2监测CAN_H,Channel 3监测CAN_L。基本的设置方法与前文中论述CAN LS网络时一致,有如下几个地方修要重新配置:(1)旋转“水平”区域的“标度”按钮,调整信号的周期为100us。
(2)短按【菜单】按键,设置如下:
[标识符] = 设置为488h(或其它CAN HS网络上的信息帧)
(3)短按总线区域的【B1】按键,设置如下:
[阈值]:[CAN_L (3)阈值] = “2.0V”
[位速率] = 500000
7.2 监测CAN HS网络上的CAN_H和CAN_L电平信号
同监测CAN LS网络上的CAN信号一样,讲过上述设置之后,即可在示波器上观测到对应的CAN_H和CAN_L电平信号。如图9所示:
图9CAN_H和CAN_L电平信号(CAN HS网络)
7.3 技术规范对CAN HS 信号电平值的规定
与CAN LS 网络不同,CAN HS 网络中,CAN_H 和CAN_L 电平信号的电压值必须满足如图10所示的要求,其中CAN_L 信号的电平值大约在1.5~2.5V ,CAN_H 信号的电平值大约在2.5~
3.5V 。电控单元在进行差分运算时,当两者的电压差值在0V 左右时,当前信号被解码成“1”(隐性位);电压差值在2V 左右时,当前信号被解码成“0”(显性位)。
图10 CAN HS 网络上的CAN_H 和CAN_L 电平值
7.4 监测CAN HS 网络的总线解码信号
同样,也可以使用总线解码功能监测CAN HS 网络上解码出来的逻辑信号,如图11截取了一段总线解码后得到的CAN 数据场信息。该信息以CAN_L 信号为基础解码。同CAN LS 网络一样,逻辑信号在时域上与电平信号完全对应,且同样包含位填充特性。
图11 CAN HS 网络上的总线解码信号
t 2,5 V
1,5 V 3,5 V
8 使用泰克“e﹡Scope”功能对示波器进行远程操作
泰克MSO4000系列示波器拥有的“e﹡Scope”功能,允许用户将示波器接入到局域网中,再通过PC上的web浏览器对示波器进行远程控制或操作。用户通过访问局域网为示波器分配的IP 地址可进入配置页面,获取当前示波器的屏幕截图、波形、配置文件,也可以通过页面中的图形控件对示波器进行远程操作。在不利于实现有人值守的测试环境中,这项功能显得尤为重要。
这里展示一个利用e﹡Scope功能来实现远程监测CAN信息帧COMMANDES_BSI(ID=0x36),并获取示波器配置的实例。使用一台TP-LINK TL-WR740N无线路由器架设了无线网络,用网线将示波器接入到路由器的LAN1借口,控制示波器的笔记本电脑则使用无线网卡与路由器建立连接。
对于示波器的相关设置如下:
(1)将示波器通过标准的以太网电缆(即普通网线,注意不是交叉线!)接入到局域网中;
(2)短按示波器上的“Utility”按键,选择“辅助功能页面”标签;
(3)旋转通用旋钮a至“输入/输出”项;并在屏幕下方选择“以太网网络设置”选项。
(4)在屏幕右侧的“网络配置”菜单中,将“DHCP/BOOTP”选项改为“开”,此时示波器会自动开始获取网络地址,当示波器上显示如图12所示的提示信息时则代表连接成功。
图12DHCP状况提示信息
(5)在已经接入到局域网的电脑上,打开浏览器,在地址栏中输入获取的示波器的网络地址,(如上图中的http://192.168.1.6),进入e﹡Scope功能的控制界面,如图13所示:
图13e﹡Scope功能主界面
在控制页面上方有七个标签,其功能分别为:
【Home】:主界面,显示当前示波器上的屏幕图像。在web浏览器中显示的图像与示波器上的图像是完全同步的。
【Data】:获取屏幕截图和波形、保存示波器的配置到本机、向示波器发送远程命令(例如关闭屏幕上显示的所有菜单)。
【Configure】:配置e﹡Scope专业的ULR地址。
【Status】:示波器的状态。切换到此标签可以检查示波器的探头、应用模块的状态,并查看示波器的软硬件版本信息。
【Control】:示波器的远程控制页面。在此页面中,示波器前面板上的所有按键、旋钮都有对应的图形控件,通过利用鼠标点击各个图形控件,即可达到远程操作示波器的功能。
【Application】:连接到泰克官方网站获取技术应用文档
【Help】:连接到泰克官方网站获取示波器的使用帮助。
对于示波器的操作主要是在“Control”页面中进行,通过该页面可以方便地对示波器进行远程操作。
9 使用Open Choice软件自动获取示波器屏幕截图
OpenChoice Desktop是泰克公司提供的一个小软件(如图14所示),用于在PC上获取示波器的当前屏幕截图、波形数据等,与在示波器上使用U盘截取数据和波形相比更为方便简洁。
图14OpenChoice Desktop软件的启动界面
要想使用该功能,必须首先在PC机上安装OpenChoice Desktop软件,该软件中已经包含了MSO4000系列示波器的驱动(TekVISA)。在软件安装完毕后,使用标准的A-B型USB线缆将示波器和PC机相连接,启动软件,主界面如图15所示:
图15OpenChoice Desktop软件的主界面
点击左上角的“选择仪器”按钮,弹出如图16所示的窗口,图中的第一个设备“USB0”极为MSO4000示波器,选择该设备,点击“确定”按钮即可完成设备的识别。
图16“选择仪器”窗口
软件主界面提供了四个选项卡,作用分别如下:
【屏幕捕获】:识别设备、获取当前示波器的截图;
【波形数据捕获】:获取波形数据并保存到电脑磁盘上;
【取得并发送设置】:获取和保存示波器的配置信息,向示波器加载预设的配置信息;
【首选项】:设置软件的语言、查看软件版本信息。
10 使用SignalExpress TE软件实现自动化测试
NI LabVIEW SignalExpress Tektronix Edition(以下简称SignalExpress TE),是美国国家仪器公司(NI)针对泰克公司的示波器产品特别推出的一款互动测量和分析软件,通过在PC上安装TekVISA驱动,再使用以太电缆或USB连接线将示波器与PC连接,使用者可直接在软件界面中完成示波器的远程操控,诸如选择触发类型、设置波形的周期、调整波形显示位置等操作,与直接操作示波器上的旋钮和按钮的效果完全一致,因此使得MSO4000系列示波器可实现远程测量功能;而使用软件内置的高级分析功能还能完成对输入信号的自动测试与分析工作,且无需额外的编程。
在实现自动化测试之前,必须首先完成以下准备工作:
(1)在电脑上安装TekVISA驱动和SignalExpress TE软件,这两个软件都可以从泰克公司的官方网站进行下载;
(2)使用标准的A-B型USB线缆将示波器与PC相连接。
运行SignalExpress TE软件,主界面如图17所示:
图17SignalExpress TE软件的主界面
以W23项目的整车电器功能测试工作为例,说明该软件在分析CAN总线信号中的若干运用。在测试中需要采集CAN LS网络上的CAN_H与CAN_L信号,且使用软件的高级分析功能自动获得每一路CAN信号的高低电平值,最后再将信号的电平值数据以ASCⅡ格式存储到电脑磁盘上,以便做进一步分析。
为了完成上述的测试工作,首先需要单击软件菜单栏上的“Add Step”(添加步骤)按钮,在弹出的“Add Step”窗口(如图18所示)中依次添加如下三个模块:
*“Acquire Signals”(获取信号):“T ek DPO/MSO4000”;
*“Time-Domain Measurements”(时域测量):“Amplitude and levels”(幅值和强度);
*“Load/Save Signals”(加载/保存信号):“Save to ASCⅡ/LVM”(保存为ASCⅡ/LVM格式)。
图18“Add Step”窗口
添加完毕后,在主界面中左侧的树形列表中即可观察到刚刚添加的三个功能模块,单击工具栏上的“Run”(运行)按钮。软件会从示波器获取波形数据并自动执行测量信号电平的工作,在测试的过程中,还会不断将获取的波形数据以ASCⅡ格式保存在电脑磁盘上的预设位置。
在测试过程中,可以直接使用软件对示波器进行基础的设置,如选择通道、调整信号周期、调整示波器的水平和垂直刻度值等,方法是直接选择“Tek DPO/MSO4000”功能模块,在软件主界面中即可弹出控制界面,如图19所示。在此界面中,使用者可以像直接操作示波器一样,对示波器进行设置。
图19 SignalExpress TE软件中的示波器设置窗口
如果想要实时监测网络信号的电平值并查看信号的波形,可切换到树形列表中的“Time-Domain Measureme nts”(时域分析)标签,并选择需要查看的CAN网络信号种类。如图20即为上例中获取的CAN_L信号波形,下方的“Peak Results”(峰值结果)项中,软件已经自动测出当前时刻信号的高电平值为5.4625V,低电平值为1.04375V。相对于使用光标功能在示波器上进行测量和读数,使用SignalExpress TE软件无疑更为快捷高效。
图20 自动测试电平信号的峰值
如果想要进一步对波形数据进行保存,需要在树形列表中选择“Load/Save Signals”功能模块,在软件主界面中会自动弹出如图21所示的设置窗口,使用者可以对数据的保存位置等信息进行设置。
图21数据保存功能的设置界面
SignalExpress TE软件还提供了测试报告编辑与输出功能,在软件主界面中,选择工具栏下方的“Project Documentation”(项目文档)按钮,可以切换到测试报告编辑页面,如图22所示,测试人员可以在此进行创建、编辑报告的操作。除了进行普通的文字输入与编辑之外,还可以使用鼠标拖拽树形列表中的标签,直接将软件获取的波形图像加载到测试报告中。当测试结束之后,利用快捷菜单中的输出功能,可将方便地将报告输出为HTML格式作进一步分析。
图22 测试报告编辑界面
除此之外,使用SignalExpress TE软件的高级分析功能,还能执行信号波形的跳变时间测量、信号周期测量等操作,更可以将当前输入的信号波形与之前获取的标准信号波形进行对比,以便更加直观地判断当前的输入信号是否严格遵循了技术规范中的要求。这些测试测量内容的操作方法与前文中所述相同,都是通过向软件的树形列表中加入相关的采集、分析模块,并顺序执行,以达到自动测试的目的。
泰克示波器的使用方法-1
示波器的使用方法 示波器虽然分成好几类,各类又有许多种型号,但是一般的示波器除频带宽度、输入灵敏度等不完全相同外,在使用方法的基本方面都是相同的。本章以SR-8型双踪示波器为例介绍。 (一)面板装置 SR-8型双踪示波器的面板图如图5-12所示。其面板装置按其位置和功能通常可划分为3大部分:显示、垂直(Y轴)、水平(X轴)。现分别介绍这3个部分控制装置的作用。 1.显示部分主要控制件为: (1)电源开关。 (2)电源指示灯。 (3)辉度调整光点亮度。 (4)聚焦调整光点或波形清晰度。 (5)辅助聚焦配合“聚焦”旋钮调节清晰度。 (6)标尺亮度调节坐标片上刻度线亮度。 (7)寻迹当按键向下按时,使偏离荧光屏的光点回到显示区域,而寻到光点位置。 (8)标准信号输出 1kHz、1V方波校准信号由此引出。加到Y轴输入端,用以校准Y 轴输入灵敏度和X轴扫描速度。 2.Y轴插件部分 (1)显示方式选择开关用以转换两个Y轴前置放大器Y A与YB 工作状态的控制件,具有五种不同作用的显示方式:
“交替”:当显示方式开关置于“交替”时,电子开关受扫描信号控制转换,每次扫描都轮流接通Y A或YB 信号。当被测信号的频率越高,扫描信号频率也越高。电 子开关转换速率也越快,不会有闪烁现象。这种工作状态适用于观察两个工作频率较高的信号。 “断续”:当显示方式开关置于“断续”时,电子开关不受扫描信号控制,产生频率固定为200kHz方波信号,使电子开关快速交替接通Y A和YB。由于开关动作频率高于被测信号频率,因此屏幕上显示的两个通道信号波形是断续的。当被测信号频率较高时,断续现象十分明显,甚至无法观测;当被测信号频率较低时,断续现象被掩盖。因此,这种工作状态适合于观察两个工作频率较低的信号。 “Y A”、“YB ”:显示方式开关置于“Y A ”或者“YB ”时,表示示波器处于单通道工作,此时示波器的工作方式相当于单踪示波器,即只能单独显示“Y A”或“YB ”通道的信号波形。 “Y A + YB”:显示方式开关置于“Y A + YB ”时,电子开关不工作,Y A与YB 两路信号均通过放大器和门电路,示波器将显示出两路信号叠加的波形。 (2)“DC-⊥-AC” Y轴输入选择开关,用以选择被测信号接至输入端的耦合方式。置于“DC”是直接耦合,能输入含有直流分量的交流信号;置于“AC”位置,实现交流耦合,只能输入交流分量;置于“⊥”位置时,Y轴输入端接地,这时显示的时基线一般用来作为测试直流电压零电平的参考基准线。 (3)“微调V/div” 灵敏度选择开关及微调装置。灵敏度选择开关系套轴结构,黑色旋钮是Y轴灵敏度粗调装置,自10mv/div~20v/div分11档。红色旋钮为细调装置,顺时针方向增加到满度时为校准位置,可按粗调旋钮所指示的数值,读取被测信号的幅度。当此旋钮反时针转到满度时,其变化范围应大于2.5倍,连续调节“微调”电位器,可实现各档级之间的灵敏度覆盖,在作定量测量时,此旋钮应置于顺时针满度的“校准”位置。 (4)“平衡” 当Y轴放大器输入电路出现不平衡时,显示的光点或波形就会随“V/div”开关的“微调”旋转而出现Y轴方向的位移,调节“平衡”电位器能将这种位移减至最小。 (5)“↑↓ ” Y轴位移电位器,用以调节波形的垂直位置。 (6)“极性、拉Y A” Y A通道的极性转换按拉式开关。拉出时Y A 通道信号倒相显示,即显示方式(Y A+ YB )时,显示图像为YB - Y A。 (7)“内触发、拉YB ” 触发源选择开关。在按的位置上(常态)扫描触发信号分别
CAN总线故障检查方法
一、CAN总线简介 CAN总线即控制器局域网,为串行通信协议,能有效得支持具有很高安全等级得分布实时控制,在汽车电子行业中,使用CAN连接发动机控制单元,传感器,防刹车系统等等,其传输速度可达到1Mbit/S。 1、CAN总线数据生成 CAN总线得数据分为模拟信号与数字信号,模拟信号就是由传感器检测得到,并将得到得信号进行转换(A/D),变成数字信号,送给MCU,由MCU将生成得CAN报文发送到总线上。模拟信号一般显示在指针表上,如气压1,气压2等.数字信号相对简单,可直接由MC U接收,然后将报文发到CAN总线上,如发动机诊断,刹车片磨损等等,一般显示在仪表上. 2、CAN信号线 CAN传输得两条信号线被称为CAN_H 与CAN_L。通电状态:CAN_H(2、5V)、CAN_L(2、5V)或CAN_L(3、5V)、CAN_H(1、5V)断电状态:CAN_H、CAN_L之间应该有60~62欧电阻值,两个120欧分别在仪表模块与后控模块中,并联后就是60欧姆左右。 ?友情提示:用万用表就是测不准CAN_H或CAN_L电压得,因为通电后C AN线上得电压在不停变化,而万用表得响应速度很慢,所以测得得电压就是并不就是当前电压而就是电压得有效值。 3、唤醒线WAKEUP
CAN总线所有模块都有两个WAKEUP引脚,模块内部就是连接在一起得,前控模块为WAKEUP输出,其它模块为WAKEUP得输入,连线时总线各模块得WAKEUP都必须与前控连接在一起,当前控电源正常、钥匙1档(ACC档)开时,前控正常工作,WAKEUP输出(输出电压值约等于当前电源电压),总线其它模块收到WAKEUP信号,模块被唤醒,在电源正常得情况下,各模块开始工作。 二、线路与模块得基本检查 1、线路得基本检查分为输入与输出线路。 对输入线路得检查:首先,要找到输入得管脚(各种车得管脚定义不同);然后将输入得管脚与模块断开;最后对线路就是否有信号输入进行检查. 对输出线路得检查 首先,确定输出得线路就是否断线或搭铁。将管脚与模块断开后测量.然后就是测量线路就是否有输出.将模块与管脚连接后检查. 2、模块得基本检查包括对电源线、地线、唤醒线、CAN线得检查。 电源得检查:模块上一般有4根左右得电源线,在模块正常工作时,每个电源都应该有24 v得电压。 地线得检查:模块上一般都有2到3根地线,在模块工作时,这些地线都要与全车得地线接触良好. 唤醒线得检查:每个模块都要有1根唤醒线,在模块工作时有24v得电压。
使用泰克MSO4000示波器测试与分析CAN总线信号
主题TOPIC —————————————————————————————————TITLE:使用泰克MSO4000示波器测试与分析CAN总线信号 OBJET :介绍了泰克MSO4000系列示波器在CAN网测试中的若干应用
目录 1目的 (3) 2适用范围 (3) 3参考文件 (3) 4历史 (3) 5泰克MSO4000示波器简介 (4) 6利用MSO4000示波器对CAN LS信号进行采集和解码 (4) 6.1 对示波器进行设置 (4) 6.2 监测CAN LS网络上的CAN_H和CAN_L电平信号 (5) 6.3 技术规范对CAN LS信号电平值的规定 (8) 6.4 监测CAN LS网络的总线解码信号 (9) 7利用MSO4000示波器对CAN HS信号进行采集和解码 (10) 7.1 对示波器进行设置 (10) 7.2 监测CAN HS网络上的CAN_H和CAN_L电平信号 (10) 7.3 技术规范对CAN HS信号电平值的规定 (11) 7.4 监测CAN HS网络的总线解码信号 (11) 8使用泰克“e﹡Scope”功能对示波器进行远程操作 (12) 9使用Open Choice软件自动获取示波器屏幕截图 (13) 10使用SignalExpress TE软件实现自动化测试 (15) 2 of Page 19
1 目的 CAN网络信号的测试包括总新电平信号的采集、电压值的测量、信号解码分析、总线通讯状态监测等内容,这部分内容也是构成CAN网络底层测试的基础,测试结果的正确与否,直接关系到整车电器架构的稳定性与电控单元功能的完好性,因此如何便捷高效地完成CAN网络的测试,已经成为整车验证环节中不可回避的一个话题。本文中提出了一套使用泰克MSO4000系列示波器与配套的LabVIEW SignalExpress TE软件进行CAN总线信号测试与分析的方法,从而完成整车高速、低速CAN网络信号的分析与测试工作。通过“示波器+PC软件”的方式,测试人员可以方便快捷地对总线信号进行实时监测,也可以使用示波器的解码功能直接观测到对应的逻辑信号。在使用附属的SignalExpress TE软件后,还可以实现远程测试、自动化测试等功能,与其它测试和分析方法相比,具有入门简单、适用范围广、数据采集精度高等优点,大大提高了基于CAN总线技术的电控单元的开发与测试效率。 2 适用范围 供新车型项目中进行CAN网底层测试时参考使用。 3 参考文件 4 历史
基于CAN总线的汽车测试解决方案
基于CAN总线的汽车测试解决方案 于CAN总线的汽车测试解决方案一、前言 随着中国汽车市场的快速发展和汽车电子的价值含量迅速提高,针对汽车电子的测试技术也变的日益复杂,在全球化的汽车设计和生产的趋势下,中国本地的工程师越来越感觉到汽车电子测试所面临的种种困难,其中主要包括:(一)无法满足产品线不断更新的需求,并希望减少产品投放市场的周期。 1.汽车电子产品的日益更新,要求测试系统以最快的速度满足新的需求。而目前国外引进的专用测试系统往往升级周期较长,无法满足本地瞬息万变的产品测试需求。图1:基于PXI TestStand平台的测试系统 2.专业汽车电子厂商往往生产多个不同型号的同类产品,并根据订单、物流的条件,其生产计划经常发生变化。如果不同型号的产品都采用不同的测试设备,将会导致测试设备重复利用率过低,大大降低投资效率。 (二)目前汽车电子测试缺乏通用仪器的解决方案,如汽车音响及仪表盘的测试往往需要专门定制的仪器,而且这些仪器价格非常昂贵。 (三)本地的售后服务和及时的故障响应。测试生产线上一切以生产线的持续运行为最高目标,当中国工程师不能掌握
全面的故障诊断和维修技术时,就只能向国外的工程师求助,这样容易导致响应速度慢,且代价昂贵。 (四)复杂的汽车测试系统常常需要多种测量和控制任务的协同工作,一个用于集成的软硬件同步平台就显得尤为的重要。 二、支持CAN协议的柔性测试设备 20世纪80年代Bosch公司为解决汽车系统中各个电子单元之间的通信问题开发了CAN总线标准。这种串行总线用2 根或1根电线把汽车里的各个电子设备连接起来,相互可以传递信息。采用CAN总线避免了电子模块间大量繁复的连线,比如仪表板上车速、发动机转速、油量和发动机温度的指示就不需要连接不同的线缆到对应的传感器,而只需要接入CAN总线,就可以从总线上获取相应信息。CAN的卓越表现使汽车制造商们纷纷开发并使用基于CAN和数据采集 设备的测试系统。国际标准组织将CAN总线接纳为ISO 11898标准。NI公司在其标准虚拟仪器测试平台上推出CAN 控制器系列,支持多种CAN总线的协议,其中包括高速CAN、低速容错CAN和单线CAN。尤其是新推出的PXI-8464软 件可选类型的CAN控制器,可以让你不用更改硬件连接, 就适应各种CAN通信协议,同时既可以作为总线控制器, 又可以作总线通信分析仪,使得测试设备可以在最大程度上适应柔性生产。
示波器的使用调试方法
示波器使用及调试方法 1、示波器介绍:示波器能观察被电路的电压、电流的波形,测定电压、频率、调幅指数、相位差等各电参量,把人们无法直接看到的电信号的变化规律,转换成可以直接观察的波形,曲线,显示在示波器的屏幕上,供分析研究. 2.、本厂主要使用的示波器型号是PROTEK 6502A 模拟示波器及泰克的TDS210数位示波器,其中PROTEK 6502A 型模拟示波器主要用于电波机芯调试天线用,泰克 TDS210型数字示波器主要用于测试电波机芯秒偏用, 、PROTEK 6502A 模拟示波器操作面板图如下图所示 2.1.1、PROTEK 6502A 模拟类示波器常用开关及用途: 2.1.1.1、电源开关1;通常按下按键后将电源打开,同时电源指示灯发亮,示波器进入可使用状态。 2.1.1.2、亮度调节旋钮2;通常顺时针旋转,显示屏4的亮度增亮,但在开电之前,需反时针转到底。 2.1.1.3、聚焦调节旋钮3;主要将光线调得更加清晰。 2.1.1.4、垂直位移调节旋钮5和15;分别调整两通道的轨迹线在屏幕上下移动。 2.1.1.5、两通道轨迹线的每格电压幅度值的转换开关6和9,用来改变每格表示的电压值,也就是改变所要观察的波形的高度。 2.1.1.6、信号输入连接器7和10,分别输入信道1和信道2的信号。 2.1.1.7、两通道轨迹线的每格扫描时间转换开关8,用来改变扫描时间系数,也就是改变所要观察的波形的宽2 3 4 5 6 7 8 9 10 11 12 16 13 14 15 17 18 19 图一 1
度。 2.1.1.8、触发源选择开关11,其中INT为内触发方式,LINE为电源触发,EXT为外触发,通常情况下我们选择内触发方式。 2.1.1.9、触发方式选择开关12。 2.1.1.10、水平位置调节旋钮13,用来调节扫描线在屏蔽左右方向移动。 2.1.1.11、XY工作方式键14,按下为开,弹起为关。 2.1.1.12、扫描微调旋钮16。 2.1.1.13、输入信号与垂直轴放大器的组合系统选择开关17和18 2.1.1.14、光标转动调节器19,用来校正受地磁场影响的光迹线与屏幕栅格线的平行度。 2.1.2、下面以用PROTEK 6502A模拟类示波器调试电波机芯天线为例介绍该类型示波器的使用方法。 2.1.2.1、首次使用该类型的示波器前必须先检查输入电压,若电压转换开关已放到220V档,确认输入的电压应在AC198V-242V范围内,参看后面板输入电压选择指示,把电源线插入后面板的AC插座中,并检查下列各开关是否在相应位置: a、电源开关1处于OFF状态, b、亮度调节旋钮2反逆时针转到底。 c、聚集调节旋钮3处于中心位置 d、输入信号与垂直轴放大器的组合系统选择开关17和18处于GND位置 e、垂直位移调节旋钮5和15处于中心位置,(垂直轴×5MAG开关处于弹起位置) f、水平位移调节旋钮13处于中心位置,(水平轴×10MAG及×5MAG开关处于弹起位置) g、触发方式选择开关12置于AUTO位置 h、触发源选择开关置于INT位置 i、两通道轨迹线的每格扫描时间转换开关8置于div j、扫描时间微调开关Trig level置于中心位置。 旋钮均处于上述规定的位置后,打开电源,将亮度调节旋钮2顺时针旋动,约过15秋后将出现亮线,并且适中;调节聚焦旋钮3,使屏幕上的线条最细;观察示波器上出现的水平亮线是否与屏幕上的栅格相平行,若不平行,则可通过用无感螺丝刀调节光标转动调节器19 使之相互平行。 2.1.3、将信号发生器与示波器及天线按下图所示的方法连接起来:
泰克TDS220示波器使用指导书-B
泰克TDS220示波器使用指导书 华为技术有限公司 版权所有侵权必究
修订记录
目录 1现以测漂移产生为例说明示波器使用基本操作规范及步骤: (5) 2抖动产生测试操作步骤: (7) 3相位瞬变测试操作步骤: (7)
关键词: 泰克TDS220示波器 摘要: TDS 220,该产品具有100MHz带宽,采样速率为1GS/s,2500点记录长 度,为双通道数字实时示波器(超取样率至少为10倍),有光标读数功能、 波形持续显示功能,示波器操作温度0℃~50℃,能够满足SYNLOCK对漂 移产生、抖动产生、相位瞬变的测试需要。本文主要介绍了它的使用方法。缩略语清单: 无。 参考资料清单 无。
泰克TDS220示波器使用指导书 我公司现在提供给新产品工程部工程师使用的示波器为美国Tektronix公司 产品TDS 220,该产品具有100MHz带宽,采样速率为1GS/s,2500点记 录长度,为双通道数字实时示波器(超取样率至少为10倍),有光标读数 功能、波形持续显示功能,示波器操作温度0℃~50℃,能够满足SYNLOCK 对漂移产生、抖动产生、相位瞬变的测试需要。 示波器控制面板上有如下功能区: 右上角3个键:分别执行AUTOSET、HARDCOPY、RUN/STOP功能; MENUS区:该区6个键负责示波器主功能菜单选择; 菜单子项选择区:该区5个键负责显示屏上某一主菜单各功能子项选择;由 控制面板最左面一排按键控制; 通道垂直位置及分辨率调节区:通道1、通道2垂直位置与分辨率由 VERTICAL区各键及旋钮选择调节; 通道水平位置及分辨率调节区:HORIZONAL区负责调整水平位置及水平分 辨率; TRIGGER区:一个旋钮及4个按键负责对触发作调整。 1 现以测漂移产生为例说明示波器使用基本操作规范及步骤: 1) 为了防止电击,示波器一定要用三脚插座,以保证可靠接入大地; 2) 为使观察到的波形客观、准确,在某一环境第一次测试前应对示波器进 行自校正:按MENUS框中的UTILITY钮,选择自校正项既可(一定将所有 探棒或导线从通道CH1、CH2 及EXT TRIG断开;如果环境温度变化范围 达到或超过5℃时,您必须执行此项操作); 3) 示波器在规定操作温度(0℃~50℃)下持续运行10分钟后,进入稳定 工作状态,既需预热10分钟; 4)将TOG板输出的2.048MHz信号与示波器CH1相连,铷钟自由振荡的 2.048MHz输出与示波器CH2相连; 5)按AUTOSET键; 6)按TRIGGER MENU按钮,将“信源”设置成“CH2”,如波形不稳定, 调节TRIGGER LEVEL旋钮,应使示波器屏幕右方“←”符号位于所选触发源 波形最大与最小值范围内,使波形稳定(示波器上方“↓”表示水平触发位
STM32的can总线实验心得要点
STM32的can总线实验心得 (一) 工业现场总线 CAN 的基本介绍以及 STM32 的 CAN 模块简介 首先通读手册中关于CAN的文档,必须精读。 STM32F10xxx 参考手册Rev7V3.pdf https://www.360docs.net/doc/0617735401.html,/bbs/redirect.php?tid=255&goto=lastpost#lastpos t 需要精读的部分为 RCC 和 CAN 两个章节。 为什么需要精读 RCC 呢?因为我们将学习 CAN 的波特率的设置,将要使用到RCC 部分的设置,因此推荐大家先复习下这部分中的几个时钟。 关于 STM32 的 can 总线简单介绍 bxCAN 是基本扩展 CAN (Basic Extended CAN) 的缩写,它支持 CAN 协议 2.0A 和 2.0B 。它的设计目标是,以最小的 CPU 负荷来高效处理大量收到的报文。它也支持报文发送的优先级要求(优先级特性可软件配置)。 对于安全紧要的应用,bxCAN 提供所有支持时间触发通信模式所需的硬件功能。 主要特点 · 支持 CAN 协议 2.0A 和 2.0B 主动模式 · 波特率最高可达 1 兆位 / 秒 · 支持时间触发通信功能 发送 · 3 个发送邮箱 · 发送报文的优先级特性可软件配置 · 记录发送 SOF 时刻的时间戳 接收 · 3 级深度的2个接收 FIFO · 14 个位宽可变的过滤器组-由整个 CAN 共享 · 标识符列表 · FIFO 溢出处理方式可配置 · 记录接收 SOF 时刻的时间戳 可支持时间触发通信模式 · 禁止自动重传模式 · 16 位自由运行定时器 · 定时器分辨率可配置 · 可在最后 2 个数据字节发送时间戳 管理 · 中断可屏蔽
CAN宝马车系CAN总线信号的检测
宝马车系CAN总线信号的检测 CAN总线信号检测 此说明用于检查总线连接上的CAN高速和CAN低速信号电平是否正确。 使用的电缆。 多功能检测导线 检测提示 ◇电压检测(示波器):电压检测的前提条件是,蓄电池已连接并且点火开关已接通 ◇电阻测量:在电阻测量时,在测量前必须把待A部件断电,为此应断开车辆蓄电池的接线,等待约3 min,直到系统中的所有电容器放完电 关于CAN总线的信息 CAN(控制器区域网络)总线系统是一种线形总线系统并具有以下特征: ◇信号双向传播 ◇所有总线用户都接收同一个信息,每个一弥线用户决定,它是杏利用该信息 ◇通过简单并联即可添加附加的总线用户 ◇此总线系统构成一个多主控单元系统,每个总线用户可以是主控单元也可以是副控制单元,根据其作为发射器还是接收器被连接而定
◇传输媒介是双线连接,导线的名称为:CANLow(低速)和CANHigh(高速) ◇廊仕每个总线用户可以通过总线同所有其他总用户通信,通过干预法,控制总线上的数据交换,数据总线K-CAN(车身CAN)、PT-CAN(传动系CAN)和F-CAN(底盘CAN)之间的主要区别是: (1)K-CAN:数据传输率约l00kBit/s,可以进行单线运行。(2)PT-CAN:数据传输率约500kBit/s,不能进行单线运行。 (3)F-CAN:数据传输率约500kBits/s,不能单线运行。 主控单元:主控单元是主动式通信方,、通信的主动权由它发出。主控制单元掌控总线,并控制通信。主控制单元能够在总线系统中向被动式总线用户(副控制单元)发送信息,并根据被动式用户的要求接收信息。 副控制单元:副控制单元是一个被动式通信用户,副控制单元被要求接收和发送数据。 多主控单元系统:在一个多主控单元系统中所有的通信用户在某个时间都能够担当主控单元或副控制单元的角色。 示波器测量 K-CAN;PT-CAN、F-CAN 为了弄清CAN总线是否完好工作,必须观察总线上的通信情况。在这种情况下不需要分析单个位,而只需要观察CAN总线是否工作。示波器测量说明:“CAN总线很可能无故障工作”。
CAN总线检测方法
C A N总线检测方法 1、车辆无法启动。 (1)首先观察无法启动时车辆的状态,主要是仪表。观察仪表是否有电,因为从仪表上可以看到车上其他模块的工作状态。如果仪表没有电可按下面的方法查起。首先,要检查仪表没电时的状态。因为仪表的显示受前控模块和顶控模块的控制。同时后控模块也影响仪表。 当打开电源开关后,按下ON档开关。看车上总线相连的开关是否有电。如有电说明是前控的问题,这里指根前控相关的所有问题。包括前控的线路问题。如没有电说明是后控的问题。 这时可以通过另一种方法简易判断。即打开电源时仪表是否有电通过。有电就是前控的问题。没电则是后控的问题。 (2)当车上的仪表有显示时可以通过仪表的液晶显示屏进行观察。方法如下,按动仪表下方的上翻键或下翻键可以找到模块在线界面。当车辆不启动时,有可能是桥模块、后控模块或前控模块掉线引起的。观察是否在线可以轻松的判断。同时,桥不在线时仪表下面的挡位指示灯不亮,后控不在线时档位灯亮。若仪表下方N灯不亮,则发动机也无法正常启动,可检查发动机与变速箱通信线是否短路、断路。 (3)起动机可以转动,但是就是起动不着。这是由于发动机的电脑故障或者是供油系统的故障引起的。 排除的方法如下:
首先检查模块的保险是否烧毁。 其次检查车辆线束上的接插件是否牢靠。 最后是检查模块上的接线是否有退出的。 2、发动机的信号无法传入总线 这一般是由于发动机和总线的接口出现了问题。在车上一共有三个接口。一个在前部电线束里,一个在后备电箱中,另一个在发动机上面铁盒边,都是屏蔽线的自锁接头。查找这些插头,看看是否有问题。 3、仪表气压表显示不一致: 气罐压力传感器是通过检测气罐中的压力,传感器输出一个模拟电阻信号传输到中控,再由中控到总线(气罐压力传感器线号72对应中控针角4-17,负极搭铁信号线为76,另一个气罐压力传感器线号74对应针角4-18负极搭铁线号为77),由总线转为数字信号通过仪表模块显示气压,电阻越大则显示气压越高,当负极搭铁线掉后或针角线虚后,电阻变为无限大,则仪表压力将顶到顶部。气罐压力传感器在标准气压下电阻值为20欧。 4、依维柯油压不报警 威帝仪表模块参数低于0.07MPA报警,依维柯发动机在不启动状态电脑默认为0.1MPA,由此得出依维柯发动机油压不可能低于0.07MPA,威帝油压报警灯则不亮,不能够在油压低时提供报警,现威帝将报警值提高至0.15MPA,超过发动机电脑默认的机油压力,可确保在发动机未着车情况下油压报警灯亮。不可串电阻,因
CAN总线检测办法
CAN总线检测方法 1、车辆无法启动。 (1)首先观察无法启动时车辆的状态,主要是仪表。观察仪表是否有电,因为从仪表上可以看到车上其他模块的工作状态。如果仪表没有电可按下面的方法查起。首先,要检查仪表没电时的状态。因为仪 表的显示受前控模块和顶控模块的控制。同时后控模块也影响仪表。当打开电源开关后,按下ON档开关。看车上总线相连的开关是否有电。如有电说明是前控的问题,这里指根前控相关的所有问题。包括 前控的线路问题。如没有电说明是后控的问题。 这时可以通过另一种方法简易判断。即打开电源时仪表是否有电通过。有电就是前控的问题。没电则是后控的问题。 (2)当车上的仪表有显示时可以通过仪表的液晶显示屏进行观察。方法如下,按动仪表下方的上翻键或下翻键可以找到模块在线界面。当车辆不启动时,有可能是桥模块、后控模块或前控模块掉线引起的。观察是否在线可以轻松的判断。同时,桥不在线时仪表下面的挡位指示灯不亮,后控不在线时档位灯亮。若仪表下方N灯不亮,则发动机也无法正常启动,可检查发动机与变速箱通信线是否短路、断路。 (3)起动机可以转动,但是就是起动不着。这是由于发动机的电脑故障或者是供油系统的故障引起的。 排除的方法如下: 首先检查模块的保险是否烧毁。
其次检查车辆线束上的接插件是否牢靠。 最后是检查模块上的接线是否有退出的。 2、发动机的信号无法传入总线 这一般是由于发动机和总线的接口出现了问题。在车上一共有三个接口。一个在前部电线束里,一个在后备电箱中,另一个在发动机上面铁盒边,都是屏蔽线的自锁接头。查找这些插头,看看是否有问题。 3、仪表气压表显示不一致: 气罐压力传感器是通过检测气罐中的压力,传感器输出一个模拟电阻信号传输到中控,再由中控到总线(气罐压力传感器线号72对应中控针角4-17,负极搭铁信号线为76,另一个气罐压力传感器线号74对应针角4-18负极搭铁线号为77),由总线转为数字信号通过仪表模块显示气压,电阻越大则显示气压越高,当负极搭铁线掉后或针角线虚后,电阻变为无限大,则仪表压力将顶到顶部。气罐压力传感器在标准气压下电阻值为20欧。 4、依维柯油压不报警 威帝仪表模块参数低于0.07MPA报警,依维柯发动机在不启动状态电脑默认为0.1MPA,由此得出依维柯发动机油压不可能低于0.07MPA,威帝油压报警灯则不亮,不能够在油压低时提供报警,现威帝将报警值提高至0.15MPA,超过发动机电脑默认的机油压力,可确保在发动机未着车情况下油压报警灯亮。不可串电阻,因为依维柯发动机传感器提供给依维柯ECM电脑信号后才传送给威帝模块,其间模拟信号已转为数字信号(不需要A/D转换),如是传感器直接给
CAN总线技术在汽车中的应用
技术导向 CAN总线技术在汽车中的应用 【摘要】文章首先概述了CAN总线技术,并详细阐述了CAN总线技术的特点和优点,及其结构和数据,传输原理,从而引出CAN总线研究的重点、关键技术及其在现代汽车上的应用现状和发展趋势。 【主题词】CAN总线汽车应用 前言 近20年来,随着现代电子技术、信息技术的发展,汽车上由电子控制单 元(ECU)控制的部件数量越来越多,例如,数字式电控燃油喷射系统(DEFI)、 废气再循环控制系统(EGR)、防抱死制动系统(ABS)、防滑控制系统(ASR)、 牵引力控制系统(TRC)、车辆稳定控制系统(VSC)、巡航系统(CCS)等等。 大量传感器、集成电路和计算机芯片等电子元器件在汽车上的广泛应用, 在提高汽车动力性、经济性、舒适性和安全性的同时,也带来其他问题: (1)电子设备的大量应用必然导致车身布线愈来愈复杂、运行可靠性降低、故障维修难度增大,必然造成庞大的布线系统。比如在沃尔沃公司生产的S80型轿车中,所安装的电缆长达1200 m,有54根保险丝。从材料成本和工作效率看,传统布线方法都将不能适应汽车的发展。 (2)上述DEFI、EGR、ABS、ASR等子系统对控制信息的共享和实时性的要求,需要共享发动机转速、车轮转速、油门踏板位置等公共数据,同时各个子系统对实时性的要求因为数据的更新速率和控制周期的不同而有 差别。传统的线缆已远远不能满足这种需求。 (3)为了使不同厂家生产的部件能在同一辆汽车中协调工作,必须按照
某种约定的标准来解决其状态信号和控制信息的传递问题。针对上述问题,在借鉴计算机网络技术和现场控制技术的基础上,诞生了各种适用于汽车环境的汽车网络技术。经过长时间发展,已形成Hart、Lonworks、Profibus、Bitbus及CAN等多种现场总线协议。CAN是控制器局域网络的简称,它由德国的Bosch公司及几个半导体生产商开发的,CAN总线是一种串行多主站控制器局域网总线。它具有很高的网络安全性、通讯可靠性和实时性,简单实用,网络成本低。特别适用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。因此CAN总线在诸多总线中独占鳌头,逐渐成为汽车总线的代名词。 1、CAN总线技术的特点和优点 CAN总线与一般的通信总线相比,它的数据通信具有突出的可靠性、实时性和灵活性。其主要特性如下: (1)具有较高的性价比。它结构简单,器件容易购置,每个节点的价格较低,而且开发过程中能充分利用现在的单片机开发工具; (2)是目前为止唯一有国际标准的现场总线; (3)为多主方式工作,网络上任一节点均可在任意时刻主动向网络上其他节点发送信息而不分主从,通信方式灵活,且无需站地址等节点信息; (4)网络上的节点信息分成不同的优先级, 可满足不同的实时要求,高优先级的数据最多可在134μs内得到传输; (5)采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动地退出发送,而最高优先级的节点不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。尤其是在网络负载很重的情
汽车测试标准之总线负载率测试
汽车测试标准之总线负载率测试 一直以来,汽车的测试都离不开CAN,而CAN的应用也离不开汽车行业。因此,在新能源汽车越发成熟的今天,CAN的一致性测试也成为各整车厂和零部件厂商关注的焦点。本文简单的对CAN一致性测试中的负载率测试做一些介绍。 负载率测试是CAN协议一致性测试里的必测项目,不同的测试人员对其的理解也有些差异。大多的测试主要分为两项,一项为测试CAN总线的负载率,另一项则是总线负载压力测试。 我们对两项常见的负载情况测试做一下测试方法的解析。 测试CAN总线的负载率,并没有固定的测试标准,大多数的CAN测试设备都可以对总线负载率做检测。例如我司测试时经常使用CANScope或者CAN卡进行总线负载率测试,而测试的方法则是计算每秒接收到的CAN总线上的帧数,根据帧数的大小配以算法得出此时的总线负载率。例如1M波特率,1s传输1Mbit的数据,则负载率达到了100%。 图1 除瞬时负载率外,CANScope里还有有通过流量分析得出接收报文的负载率情况,与上述的实时侦测帧数计算有些区别的是,流量分析是通过波形占用总线的时间作为参考,相比于实时帧数计算更具有说服性。 图2 而总线负载压力测试,在GMW14242中,要求被测CAN总线在所有负载条件下能正常运
行并且不会死机。其试验原理是:由测试设备制造各种负载条件下的情况,测试被测CAN 总线是否还可以将正常的应用数据发出。测试报文如下表所示。每个报文产生按 10%、30%、50%、70%、90%的负载率,观察被测CAN总线发出的应用数据是否依然正常。 图3 我们再用CANScope-Pro测试举例了解一下测试过程: 步骤 1:启动 CANScope-Pro,将 RHL 调节为 60 欧,设置好和被测 DUT 相同的波特率,点击开启。控制被测能发出各种预期的报文。 步骤 2:打开 CANScope 的报文界面和“总线负载率”界面,发送 ID 填入 111H,DLC 为0,发送次数为无限。分别调整重复次数,使总线负载率为 10%、30%、50%、70%、90%。使用 ID 筛选的方式,对应观察被测 DUT 的应用数据是否间隔时间是否正常。为筛选出被测 DUT 发出的 181H 的 ID,通过增量时间的方式观察是否有异常。 步骤 3:打开 CANScope 的报文界面和“总线负载率”界面,发送 ID 填入 7FFH,DLC 为8,发送次数为无限。分别调整重复次数,使总线负载率为 10%、30%、50%、70%、90%。使用 ID 筛选的方式,对应观察被测 DUT 的应用数据是否间隔时间是否正常。为筛选出被测 DUT 发出的 181H 的 ID,通过增量时间的方式观察是否有异常。 图4 依据 GMW14241,测试结果为 DUT 在 10%、30%、50%、70%、90%负载下均可以正常工作,并且不会因为负载过高而死机,则通过测试。
multisim10示波器的使用方法
共基极放大器 电子仿真软件MultiSIM 9中的虚拟示波器使用方法 默认分类 2009-04-11 12:59 阅读330 评论0 字号:大中小 在电子仿真软件MultiSIM 9中,除了虚拟双踪示波器和虚拟四踪示波器以外,还有两台高性能的先进示波器,它们分别是:跨国“安捷伦”公司的虚拟示波器“Agilent54622D”和美国“泰克”公司的虚拟数字存贮示波器“TektronixTDS2024”。本刊06年第五期曾对Multisim7中的安捷伦虚拟示波器设置和显示有过简单介绍,读者可以参阅该文相关内容。本文主要介绍安捷伦虚拟示波器的一些特殊其它功能和美国“泰克” 公司的虚拟数字存贮示波器这两台高档次的示波器使用方法。 一、安捷伦虚拟示波器“Agilent54622D”的使用方法举例 Agilent54622D虚拟示波器的带宽为100MHz,具有两个模拟通道和16个逻辑通道。图一是它的放大面板图,它的各个开关、按钮及旋钮的排列和调节都和实物仪器完全一样,我们在自己的电脑里也能享受到使用高档次测量仪器的愉悦,且没有损坏仪器的担忧。
图一 一、显示基本波形操作(这里以模拟通道1为例说明) 首先在电子仿真软件MultiSIM 9电子平台上调出安捷伦虚拟函数信号发生器和安捷伦虚拟示波器各一台。并按图二连好电路;双击安捷伦虚拟函数信号发生器图标“XFG1”打开电源开关,不作任何设置使用它的默认值,即:频率1kHz,幅值100mVpp的正弦波(可参阅上期介绍)。
图二 然后双击安捷伦虚拟示波器图标“XSC1”,打开它的电源开关,见图一中鼠标手指所示。 打开仿真开关,这时可以从安捷伦虚拟示波器屏幕上看到一条水平细红线。在放大面板处于当前窗口的前提下,将鼠标移至“Y轴量程调节”旋钮上呈手指状,或按住鼠标左键向逆时针方向转;或连续点击键盘上的“↑”键都可以逐渐放大正弦波信号幅度,且屏幕上方“Y轴量程调节指示”数字在减小; 将鼠标移至“X轴时间调节”旋钮上呈手指状,或按住鼠标左键向逆时针方向转;或连续点击键盘上的“↑”键都可以使正弦波信号展宽,且屏幕上方“X轴时间量程指示”数字在减小; 将鼠标移至屏幕左下角“波形亮度调节”(也可认为是在调整聚焦)旋钮上呈手指状,或按住鼠标左键向顺时针方向转;或连续点击键盘上的“↓”键都可以逐渐加粗正弦波信号波形; 将鼠标移至屏幕左下角“Y轴移位调节”旋钮上呈手指状,或按住鼠标左键向顺时针方向转;或连续点击键盘上的“↓”键都可以将正弦波向下移动,相当于真实示波器的Y轴移位旋钮; 经以上调整结果,从屏幕上可以看到如图三所示波形,从图上我们通过屏幕上方显示的数据可以读出1kHz正弦波的周期是1mS、幅度为100mV,与安捷伦虚拟函数信号发生器设置相符,波形中心离开X 轴为50mV,屏幕上的波形已被适当加粗。
泰克示波器用于数据采集的步骤及使用注意事项
泰克示波器用于数据采集的步骤及使用注意事项 泰克示波器可以用来采集数据,以下是在DPO4032下做的实验。 https://www.360docs.net/doc/0617735401.html,B连接 如果不希望用U盘拷贝来拷贝去,可以找个USB电缆,再去泰克网站下载Open Choice Desktop,装好后就可以直接用USB传屏幕截图和数据了。 2.数据采样深度 回传的数据,量化误差其实不小,好像仅仅是为显示服务的。据观察,不同量程下,传回的数据量化误差是有很大差别的;另外,同一个量程下,微调每个网格的单位(xx V/div)也会影响到量化误差。不过,对于10GS/s的采样率,其AD能做到10位已经挺不容易了。不知道有没有低采样率高采样深度的示波器,如果没有,这也是个market。 3.存储深度 实验室里有两种示波器,一个存储深度2k个采样点,另一个10M个采样点。如果要对一个4s的信号采样,那么2k个点能够做到的采样率就只有500,然而对于10M存储深度的示波器,采样率可以达到2.5M。当然,我曾试过把10M的结果导出,结果存成个将近500M的文件,悲剧。 4.数据处理 可以把导出的csv文件前面几行删掉,之后用Matlab的workspace里面的Import data导入数据。1M点的数据,Matlab能轻松plot出来,真厉害啊。 5.直流耦合 在直流耦合的情况下,调节垂直偏移不影响采集数据的结果。 通过对损坏数字示波器的故障分析,发现主要损坏的原因为浮地测量,以下为预防数字示波器损坏的操作/使用注意事项: 1. 为了仪器操作人员的安全,仪器在安全范围内正常工作,保证测量波形准确、数据可靠、降低外界噪声干扰;使用时, a. 测量系统- 例如示波器、信号源;打印机、计算机等设备等
泰克示波器使用方法审批稿
泰克示波器使用方法 YKK standardization office【 YKK5AB- YKK08- YKK2C- YKK18】
常用按钮解释: 1.save/recall:存储或者取回波形到软盘合作内存; 2.测量:点击,自动进行波形测量; 3.Acquire采集:采样设置; 4.Utility功用:激活系统工具,诸如语言选择; 5.Cursor 光标:点击按钮,激活光标,可以测量波形参数; 6.Display显示:改变波形外观或者显示屏? 7. 8. 9.help帮助:点击按钮,激活系统的帮助系统; 10.默认设置default setup:点击按钮,回复出厂设置;
11.Autoset 自动设置:点击按钮,根据被测波形,自动的设计垂直、水平和触发控制器, 以利于被测波形全部的显示; 12.Single SEQ: 13. Run/stop运行停止:点击按钮,停止捕获波形(停止后,即会显示已经捕捉到的波 动,即波动的静止状态),或者点击重新启动捕获,可以观察动态的波形; 14.Print 打印: 15 1.Position:旋转按钮,可调节所选波形的垂直位置 2.CH1 MENU:点击按钮,可以打开或者关闭通道1 3.VOLTS/DIV:旋转按钮,可调节所选波形垂直方向刻度系数 备注:3跟15同时也为cursor1和cursor2的位置旋转按钮 4.MATH/MENU:显示所选运算波形类型 5.Position:旋转按钮,可调节所选波形的水平位置 6.HORIZ MENU:调节水平视窗及释抑菜单 7.SET to ZERO:设置相对于已捕获波形的触发点至中点 8.SEC/DIV:调节所选波形的水平刻度系数
泰克示波器自检的步骤
泰克示波器自检的步骤详解 示波器在工程师日常使用频率中算是比较高的一种电子测量仪器了。 所有电子测量类仪器使 用一定时间段后就需要自检自校准, 那么示波器该如何自检呢?下面由安泰示波器维修转接 分享示波器自检的步骤: 第一步:卸下示波器的所有探头、转换器以及信号连接。 第二步:打开示波器,热机一刻钟左右。通常温差会影响示波器自校。 第三步:选择主界面菜单进入 Utilities ,打开二级菜单。
第四步;进入第三步的二级菜单点击"Instrument Calibration ”或者类似名字的按钮。 Run SPC 第五步:等待,SPC校准通过之后会显示“ PasS'。查看示波器状态,选择运行 等待约一刻钟完成。
经过若干时间等待,如果最终出现如下画面: 恭喜你,通过了。到此为止,可以基本上判定该示波器是正常的。连续点按两次 键, 即可看到下图通过的情况: 250MS/5 flClk points zaczicDczir □匚 Menu Of 时■:Ffw ■『萼 nPt J _in I -4 ”j 円 M j mlgriril Pgih Compeiisd-tiaiii ih 砒 I 用 completed. AuiEqi Push Menu {]ir In r?niDVf , tlilv me-s-taij?.
特别建议:经常做做 SPC 不仅能够及时发现仪器故障,还可以提高测试的精度哟。最关键 的是,不需要任何辅助设施,完全没成本的,只是要花费您一点宝贵的时间。 爲n,:航j jl UlklMv P MI ? 1 Viqnil P.i i f KdOOCiQi 5 1CK 1>D Intt *■ .*■■■ ■ H MM — ■■ T r??u j (U -WJJ
车辆CAN总线概述(完整版)
一.CAN总线简介 1、CAN总线得发展历史 20世纪80年代初期,欧洲汽车工业得蓬勃发展,车辆电子信息化程度得也不断提高。当时,由于消费者对于汽车功能得要求越来越多,而这些功能得实现大多就是基于电子操作得,这就使得电子装置之间得通讯越来越复杂,同时意味着需要更多得连接信号线,但就是传统得线束式汽车电子系统已经不能满足车辆电子信息功能发展得需求。为了解决这一制约现代汽车电子信息化发展得瓶颈,德国Bosch公司设计了一个单一得网络总线,所有得外围器件可以被挂接在该总线上,经过试验,这一总线能够有效解决现代汽车中庞大得电子控制装置之间得通讯,并且能够减少不断增加得信号线。所以在1986年Bosch公司正式公布了这一总线,且命名为CAN总线。 CAN控制器局部网(CAN—Controller Area Network)属于现场总线得范畴,它就是一种有效支持分布式控制或实时控制得串行通讯网络,它具有很高得网络安全性、通信可靠性与实时性,简单实用,网络成本低,特别适用于汽车计算机控制系统与环境恶劣、电磁辐射强与振动大得工业环境,因此CAN总线在诸多现场总线中独占鳌头,成为汽车总线得代名词,CAN总线开始进入快速发展时期: 1987年Intel公司生产出了首枚CAN控制器(82526)。不久,Philips公司也推出了CAN 控制器82C200; 1991年,Bosch颁布CAN 2、0技术规范,CAN2、0包括A与B两个部分为促进CAN以及CAN协议得发展,1992在欧洲成立了国际用户与厂商协会(CAN in Automation,简称CiA),在德国Erlangen注册,CiA总部位于Erlangen。CiA 提供服务包括:发布CAN得各类技术规范, 免费下载CAN文献资料, 提供CANopen规范DeviceNet规范;发布CAN产品数据库,CANopen产品指南;提供CANopen验证工具执行CANopen认证测试;开发CAN规范并发布为CiA标准。 1993 年CAN 成为国际标准ISO11898(高速应用)与ISO11519(低速应用); 1993年,ISO颁布CAN国际标准ISO11898; 1994年,SAE颁布基于CA N得J1939标准; 2003年,Maybach发布带76个ECU得新车型(CAN,LIN,MOST); 2003年,VW发布带35个ECU得新型Golf。