航模无刷电机调速器说明书
航模无刷电机调速器说明书
尊敬的用户:感谢您使用飞盈佳乐有限公司设计、制造的航模无刷马达智能动力控制器(ESC)。因本产品在启动使用时产生的功率强大,错误的使用及操作可能造成人身伤害和设备损坏,我们强烈建议客户在使用本产品前仔细阅读本使用手册,严格按操作规定使用。我们不承担因使用本产品而引起的的任何责任,包括但不限于附带损失或者间接损失的赔偿责任。同时,不承担使用人擅自拆装及修改本产品引起的任何责任和因第三方产品所造成的任何责任。
我们有权不预先通知变更产品,包括外观,性能参数及使用要求;对本产品是否适合使用者特定用途不作任何保证、申明或承诺。
一、航模无刷电机控制器主要特性:
●采用功能强大、高性能MCU处理器,用户可以针对自身需求设置使用功能,充分体现我们产品独具优势的智能特点
●支持无刷电机无限制最高转速
●支持定速功能。
●精心的电路设计,抗干扰性超强
●启动方式可设置,油门响应速度快,并具有非常平稳的调速线性,兼容固定翼飞机及直升飞机。
●低压保护阀值可设置
●内置SBEC,带舵机负载功率大
●具备多种保护功能:输入电压异常保护/电池低压保护/过热保护/油门信号丢失降功率保护
●通电安全性能好:接通电源时无论遥控器油门拉杆在任何位置不会立即启动电机
●过温保护:控制器工作时温度到达120℃时功率输出会自动降低一半,低于120℃时功率输出自动恢复
●兼容所有遥控器操作设置和支持编程卡设置
●设置报警音判断通电后工作情况
●本公司对此产品具备完整知识产权,产品可持续升级更新。并可根据客户的需求量身定制产品。
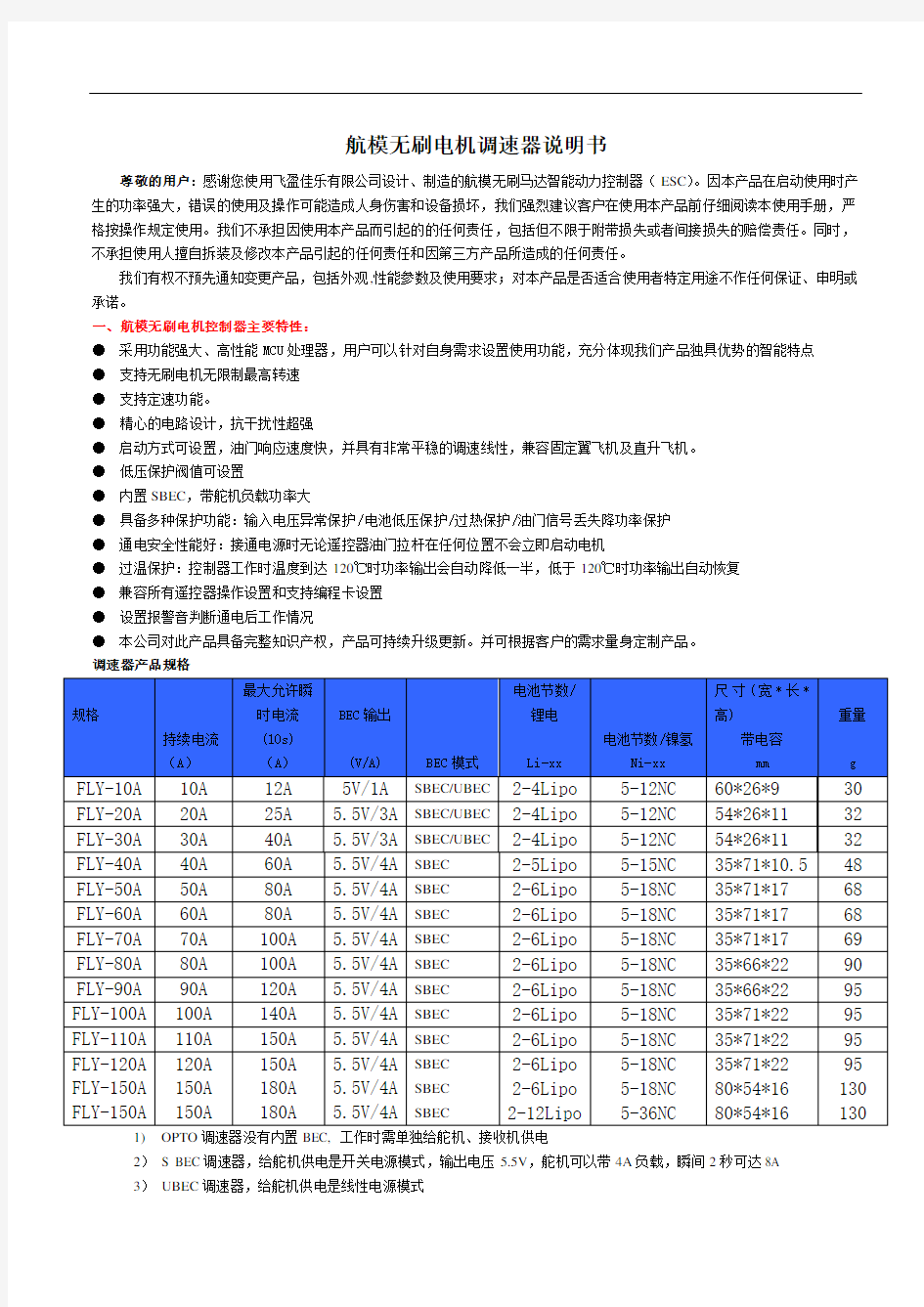
调速器产品规格
1)OPTO调速器没有内置BEC, 工作时需单独给舵机、接收机供电
2)S BEC调速器,给舵机供电是开关电源模式,输出电压5.5V,舵机可以带4A负载,瞬间2秒可达8A
3)UBEC调速器,给舵机供电是线性电源模式
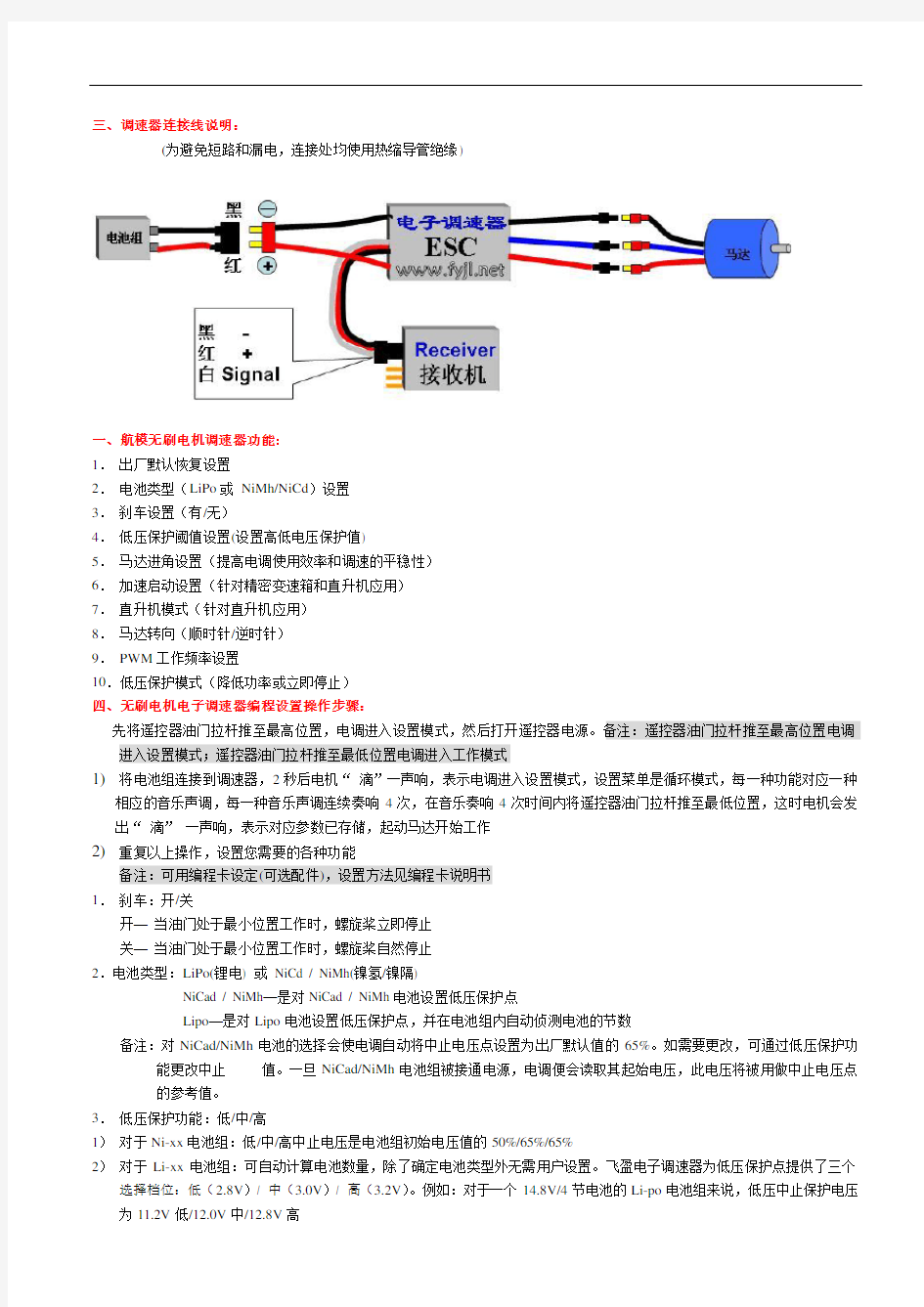
三、调速器连接线说明:
(为避免短路和漏电,连接处均使用热缩导管绝缘)
一、航模无刷电机调速器功能:
1.出厂默认恢复设置
2.电池类型(LiPo或NiMh/NiCd)设置
3.刹车设置(有/无)
4.低压保护阈值设置(设置高低电压保护值)
5.马达进角设置(提高电调使用效率和调速的平稳性)
6.加速启动设置(针对精密变速箱和直升机应用)
7.直升机模式(针对直升机应用)
8.马达转向(顺时针/逆时针)
9.PWM工作频率设置
10.低压保护模式(降低功率或立即停止)
四、无刷电机电子调速器编程设置操作步骤:
先将遥控器油门拉杆推至最高位置,电调进入设置模式,然后打开遥控器电源。备注:遥控器油门拉杆推至最高位置电调进入设置模式;遥控器油门拉杆推至最低位置电调进入工作模式
1)将电池组连接到调速器,2秒后电机“滴”一声响,表示电调进入设置模式,设置菜单是循环模式,每一种功能对应一种
相应的音乐声调,每一种音乐声调连续奏响4次,在音乐奏响4次时间内将遥控器油门拉杆推至最低位置,这时电机会发出“滴”一声响,表示对应参数已存储,起动马达开始工作
2)重复以上操作,设置您需要的各种功能
备注:可用编程卡设定(可选配件),设置方法见编程卡说明书
1.刹车:开/关
开—当油门处于最小位置工作时,螺旋桨立即停止
关—当油门处于最小位置工作时,螺旋桨自然停止
2.电池类型:LiPo(锂电) 或NiCd / NiMh(镍氢/镍隔)
NiCad / NiMh—是对NiCad / NiMh电池设置低压保护点
Lipo—是对Lipo电池设置低压保护点,并在电池组内自动侦测电池的节数
备注:对NiCad/NiMh电池的选择会使电调自动将中止电压点设置为出厂默认值的65%。如需要更改,可通过低压保护功能更改中止值。一旦NiCad/NiMh电池组被接通电源,电调便会读取其起始电压,此电压将被用做中止电压点的参考值。
3.低压保护功能:低/中/高
1)对于Ni-xx电池组:低/中/高中止电压是电池组初始电压值的50%/65%/65%
2)对于Li-xx电池组:可自动计算电池数量,除了确定电池类型外无需用户设置。飞盈电子调速器为低压保护点提供了三个选择档位:低(2.8V)/ 中(3.0V)/ 高(3.2V)。例如:对于一个14.8V/4节电池的Li-po电池组来说,低压中止保护电压为11.2V低/12.0V中/12.8V高
4.恢复出厂默认设置
将电子调速度器设定为出厂默认状态:
1) 刹车:关
2) 电池类型:有自动侦测功能的Lipo 电池
3) 低压中止点:中(3.0V/65%)
4) 马达进角设置:自动
5) 加速度启动设置:柔和
6) 直升机模式设置:关
7) PWM工作频率设置:8kHz
8) 低压保护模式:减小功率
5.马达进角设置:自动/低/高
自动--电调自动侦测最适宜的马达进角设定
低(7-22度)--为大多数的內转子马达设置
高(22-30度)--为6极和6极以上的外转子的马达设置
大多数情况下,自动进角适用于所有类型的马达,但为了提高效率,我们建议对2极马达使用低进角设置(一般的内转子),6极和6极以上(一般的外转子)马达使用高进角。对于较高的转速的马达,可以设定高进角。某些马达需要特殊的进角设置,当您无法确定,我们建议您采用马达制造商推荐的进角设置或使用自动侦测进角设置
备注:马达的进角设置修改成功后,请您先在地面上调试您的马达
6.加速启动设置:(提供带有线性油门响应的快速加速启动)
超柔和启动:从开始到最大速度油门响应滞后1.5秒,此设置能够防止精密齿轮/传动装置在瞬时负载下脱落;建议此设置用于装有变速箱的固定翼模型或直升机
柔和启动:从开始到最大速度油门响应滞后1秒,建议此设置用于装有变速箱的固定翼模型或直升机
加速启动:从开始到最大速度油门响应无滞后,建议对装有直接驱动的固定翼模型使用
7.直升机模式(针对直升机应用)
直升机关闭
直升机1:从开始到最大速度油门响应滞后5秒,但启动后若关闭油门,再次启动时则均以普通模式启动
直升机2:从开始到最大速度油门响应滞后15秒,但启动后若关闭油门,再次启动时则均以普通模式启动
备注:一旦工作在直升机模式,无论电调之前有怎样的设置,电调刹车和低压保护类型设置都将分别被自动重新设置为无刹车和减小功率模式
8. 马达转向:正/反转
大多数情况下,马达正/反转可以通过交换电调连接马达的三根输出线中的任意两根实现的。在马达接线已被直接焊接在电调上时,可以通过改变电调上的设置值来使马达改变转向。
9. PWM工作频率:8kHz / 16kHz
8kHz—为2极马达设置的工作频率,比如內转子
16kHz--为2个以上极的马达设置的工作频率,比如外转子
虽然工作频率16kHz能给我们的固定翼或直升机提供劲暴的动力,但由于16kHz所产生的较高RF噪音,所以默认设置为8kHz
10 低压保护模式:减小功率/立即停止
减小功率—当达到预设的低压保护阈值时,电调便会减小马达的输出功率(推荐)
立即停止—当达到预设的低压保护阈值时,电调立即关断输出马达功率
五、编程循环菜单顺序与解说
●开启遥控器,将油门打到最高点--------将电调接上电池,等待两秒-------进入编程
进入编程设定后,会听到以下鸣叫音,按如下图顺序循环鸣叫,在鸣叫某个提示音后,4 次鸣叫音内将油门
打到最低,
则确认和保存此设定项。
●警报音:飞盈佳乐航模无刷电子调速器设计了可听见的警报音,供您判断通电后的异常情况1.上电后无法进入工作模式:说明还没有设置油门行程
2.持续的滴滴声:说明油门拉杆不在最小位置上
滴一声响后有短暂的停顿:说明电子控制器不能侦测到来自接收机正常的油门信号
3.滴一声响后有一秒钟的停顿:说明电池组电压在可接受范围之外
(一旦电池被连接,电调便会进行自检并检验电池电压。)
●控制器智能安全保护功能
油门信号丢失保护
当ESC 侦测到油门信号丢失2s 后,将自动减小对马达的输出功率,然后油门信号再次丢失超过2s ,ESC 将
自动关断马达。如果在马达的输出功率减小过程中油门信号恢复,ESC 可以立即恢复油门控制。这样在瞬间信号丢失情况下(2s 以下),ESC 并不会进行油门保护;只有当遥控信号确实长时间丢失,才进行保护,但ESC 不是立即关闭输出,而是有一个逐步降低输出功率的过程,给玩家留有一定的救机时间,兼顾安全性和实用性。
● 第一次接通电调需要设置油门行程
飞盈佳乐ESC 的特点是根据不同的发射机设置最佳油门行程,ESC 能够通过发射机的整个油门行程来获取最平稳的油门线性,目的是让ESC 获取并记忆发射机的油门输出信号,此操作只需要进行一次,更换发射机时需重复此操作步骤。 注意:使用时,连接电池组之前,务必仔细检查所有插头连接的极性是否正确,以及安装是否牢固,防止因为错误连接极性或短路而损坏控制器
第一次使用ESC 操作如下图所示:
●
ESC 正常启动程序如下所示:
注意:您的航模如果在飞行过程中马达突然停转,应当立即将油门拉杆推到最低位置,再推起油门拉杆,
这样马达将重新启动,此时将油门控制在较小位置,立即降落航模飞机
使用时需注意的安全常识
● 请勿私自拆卸电子调速器上的电子元器件,有可能由此造成永久性的损坏或信息丢失
● 检验接收机装置设置正确,首次测试ESC 和马达时,如果尚未确认接收机装置上的设置正确,勿在马达上安装螺旋桨或传
动小齿轮。
● 不使用裂开或被刺破的电池组 ● 不使用容易过热的电池组 ● 不使用短路电池
● 不使用不合乎标准的电缆绝缘材料 ● 不使用不合乎标准的电缆连接器
● 电池或伺服系统的数量不要超过控制器的规定 ● 电池电压值不要超出电子调速器的工作电压范围
● 注意电池极性,错误的电池极性会损坏电调
● 请确保该电子调速器不会用于载人飞行器及其他载人机器上 ● 勿将ESC 置于潮湿或强光地方
第二组声音表示刹车的状态(一声滴滴响表示刹车为开,二声滴滴响表示刹车为关)
ESC 准备完毕!
将电池组连通ESC ,当ESC 第一次通电,会连续发出两组声音,表示ESC 进入工作状态
第一组声音表示与ESC 相连接的Lipo 电池组中电池节数(三声滴响表示有三节电池,四声滴响表示有四节电
开启遥控器,将油门摇杆打到底
开启遥控器,将油门摇杆打到顶
等待2s ,马达发出”滴
-”单短音,表示油门最高点校准成功
接通电池组,接
收机,马达与ESC 进入等待
将油门摇杆打到底,马达”滴-”的一声,表
示油门校验成功,油门行程校准完毕
●勿在电机转动条件下抽掉电池,这样可能引发大的峰值电流导致ESC烧坏●勿在ESC外包裹任何物品,尽量将ESC安装在通风散热好的位置
常见问题的处理方法
The Specification of Electric Speed Controller for Brushless Motor
Dear customers:
Thank you for using the smart power electric speed controller (ESC) for brushless motor designed and produced by Shenzhen Flycolor Electron Co., LTD. Wrong use and operation may cause personal injuries and damages on the equipment due to the strong power at the starting of the product. We strongly recommend customers to read the specification carefully before using the product and operate the product strictly in accordance with the operating provisions. We assume no responsibilities generated from the application of the product, including but not limited to liabilities for damage of incidental losses or indirect losses. Meanwhile, we assume no responsibilities generated from the disassembly and modification by users themselves and assume no responsibilities caused by products from the third party.
We have the right to alter products including appearance, performance parameter and operating requirement without advanced notice. We make no guarantee, declaration or promise on whether the product is suitable for specific purpose of users.
I. The main properties of electric speed controller for brushless motor
●Use powerful and high-performance MCU processor. The users can set function of use according to their requirements. It fully reflects the smart property of our products as a unique advantage.
● Support unlimited rotate speed of brushless motor
● Support the function of fixed speed
● Delicate circuit design with strong anti-interference
●The starting mode can be set. The response speed of throttle is very quickly and with very stable linear of speed regulation. It can be used in fixed wing aircraft and helicopter
● Threshold va lues of low-voltage protection can be set.
●With internal SBEC, the operating power to start steering engine is strong and the power dissipation is small.
● Multi protection function: protection for abnormal input voltage/ protection for low battery/ protection for overheat/protection of lowing power when lost of signals from throttle
●Good safety performance under energization: the motor will not start at the time of power on regardless of the location of pull rod of throttle in controller.
●Protection for overheat: the output power will lesson to half when the temperature reaches 100℃during the operation of ESC. The output power will automatic recover when the temperature is under 100℃
●Supports with operation setting for all controller and setting of programming panels
● Set alarm sound. And judge the working situation after power on.
● The company has completed intellectual property on the product. The product can be continuingly updated and upgraded. The product can be made to customers’ require ments.
The product standard of ESC
Notice:
1)The ESC with SBEC supply steering engine with switching power. The output voltage is 5.5V. The load current of steering engine is 4A. At the moment of 2 seconds can reach 8A.
2)The ESC with UBEC supply steering engine with linear power. The output voltage is 5.5v. The load current is 1A.
3)OPTO means that there is no BEC inside ESC. The steering engine and receiver shall be supplied with power separately.
4)Customized BEC can be made according to customers’ requirements.
5)Customized ESC can be made according to customers’ requirements.
II. The introduction of the connection in the ESC
In order to avoid short circuit and leakage, the joint are connected by thermal shrinkable pipe to ensure insulation.
Battery Pack Black Red White Motor
III. The function of electric speed controller for brushless motor
1. Reset to factory default
2. Battery types set(Lipo or NiMh/NiCd)
3. Brake set (yes/no)
4. Threshold set of protection for low voltage (set a protective value for low voltage)
5. Motor entrance angle set (improve the service efficiency of ESC and the stability in the starting)
6. Accelerated startup set (used in precise gear box and application of helicopter)
7. Helicopter mode (used in application of helicopter)
8. Steering motor (clockwise/anticlockwise)
9. Operating frequency set
10. Protection mode under low voltage (reduces power or halts immediately)
VI. The operation steps of programming in ESC for brushless motor.
Push the pull rod of throttle in the ESC to the highest position to make the ESC enter the setting mode and then turn on the ESC.
Remark: the ESC enters the setting mode when the pull rod of throttle in the ESC is pushed to the highest position; the ESC enters the working mode when the pull rod of throttle in the ESC is pushed to the lowest position.
1) Connect the battery pack to the ESC. After two seconds, a beep shows that the ESC enters the setting mode. The menu of setting mode is a cycle model. Each function corresponds to one corresponding musical tone. Each musical tone will ring out for four times continuously. During the four periods when music rings, push the pull rod of throttle in the ESC to the lowest position. Then the motor will give out a beep to inform that corresponding parameters have been stored, and the ESC enters the working mode.
2) Repeat the above operation to set various functions you need.
Remark: Can also set with programming panels(optional accessories). Refer to specification of programming panels for setting method.
1. Brake: turn on/turn off
Turn on: the propeller stops immediately when the throttle works under the smallest position.
Turn off: the propeller stops naturally when the throttle works under the smallest position.
2. Battery types: LiPo or NiCd/NiMh
NiCd/NiMh- set protection point for NiCad/NiMh.
Lipo-set protection point for Lipo and detect numbers of battery automatically in the battery pack.
Remark: the choice of NiCad/NiMh battery will make the ESC automatically set the cutoff value of voltage at 65% of factory defaults. The cutoff value can be modified through the function of protection for low
voltage in case of changes. Once the battery pack of NiCad/NiMh connects to the power, the ESC will
read its initial voltage. The voltage will used as a reference value for cutoff value of voltage.
3. Protection function of low voltage: low/middle/high
1) In case of Ni-xx battery pack: the cutoff value of voltage is 50%/65%/65% of the initial voltage of battery
pack under low/middle/high threshold value.
2) In case of Li-xx battery pack: the number of batteries can be calculated automatically. Users need not to set
anything except the types of battery. The ESC provides three optional gears for protection point of low voltage: low(2.8V)/middle(3.0V)/high(3.2V)
For example: the protection cutoff voltage for low voltage is 11.2V as low /12.0V as middle/12.8V as high in case of Li-po battery pack with four batteries and voltage at 14.8V.
4. Recover to factory default setting.
1) The factory default setting of ESC:
2) The brake: off
3) The types of battery: Lipo battery with automatic detection.
4) The cutoff value under low voltage: middle (3.0V/65%)
5) The angle of entrance in motor: automatic
6) Setting for accelerated startup: smooth
7) The setting Mode for helicopter: off
8) The frequency of working: 8kHz
9) Protection mode under low voltage: reduce power
5. The angle of entrance in motor: automatic/low/high
Automatic-the ESC detect the most suitable angle of entrance in motor automatically.
Low (7-22 degree) – suitable for the setting of most motors with inner rotor
High (22-30 degree)-suitable for the setting of most motors with outer rotor and 6 poles or more than poles
Under most cases, the automatic angle of entrance is suitable for all motors. However, in order to increase
efficiency, we recommend using low angle of entrance in motors with 2 poles (generally inner rotor), and using high angle of entrance in motors with 6 and more than 6 poles (generally outer rotor). We can set a high angle of entrance for motors with higher rotate speed. Some motors need special angle of entrance. We recommend using the angle of entrance recommended by motor producers or automatic detected angle of entrance in case of uncertainty.
Remark: please debug the motor on the ground after successfully altering the angle of entrance in motor.
Setting for accelerated startup: provide rapid accelerated start up with linear throttle response.
Ultra smooth startup: the lag time of throttle response between the starting and highest speed is 1.5 seconds. The setting mode can prevent the precision gear/gearing dropping under momentary load. The setting mode is recommended to use in fixed wing model with gear box or helicopter.
Smooth startup: the lag time of throttle response between the starting and highest speed is 1 second. The setting mode is recommended to use in fixed wing model with gear box or helicopter.
Accelerated startup: there is no lag time of throttle response between the starting and highest speed. The setting mode is recommended to use in fixed wing model with direct drive.
6. The Mode for helicopter: (use in application of helicopter)
Turn off the helicopter
Helicopter 1: the lag time of throttle response between the starting and highest speed is 5 seconds. However, if the throttle is turned off after startup, the next startup will commence in common mode.
Helicopter 1: the lag time of throttle response between the starting and highest speed is 15 seconds. However, if the throttle is turned off after startup, the next startup will commence in common mode.
Remark: once working under mode for helicopter, the brake and types of protection under low voltage will be reset automatically to mode of no brake and reduce power mode separately regardless of previous setting of ESC.
7. Steering motor (clockwise/anticlockwise)
In most cases, the clockwise and anticlockwise rotation of motor can be realized by exchanging any two lines among the three output lines in the ESC connected to the motor. The direction of rotation can be changed by altering the setting value on the ESC in case that the wire connected to motor has been directly welded on the ESC.
8. Operating frequency:8kHz / 16kHz
8 kHz-the Operating frequency for motor with 2 poles, for example inner rotor
16 kHz-the Operating frequency for motor with poles more than 2, for example outer rotor
Although the operating frequency of 16 kHz can provide strong power for fixed wing or helicopter, the default setting is 8 kHz for there are louder RF noise under the operating frequency of 16 kHz.
9. Protection mode under low voltage: reduce power/ halt immediately
Reduce power- the ESC will reduce the output power of motor when reaches default protection threshold for low voltage (recommend)
Halt immediately-the ESC will cut off the output power of motor when reaches default protection threshold for low voltage
V. The order and introduction of circle menu under programming mode
●Turn on ESC- push the throttle to the highest position-connect the ESC to battery- wait two second-enter programming mode
After enter programming mode, the following beeps will give out in accordance with the following circuit. After certain warning tone, push the throttle to the lowest position during the four beeps.
Confirm and reserve the setting.
●The warning tone: the warning tone is set as audible sound to help users judge abnormal condition after turn on the power.
1. Fail to enter working mode after turn on the power: the routine of throttle has not been set yet.
2. Continuing beeps: the pull rod of throttle is not in the lowest position
3. There is a short pause after a beep: the ESC can not detect normal throttle signals from receiver.
4. There is a pause of one second after a beep: the voltage of battery pack is out of acceptable limit (once the battery is connected, the ESC will carry out a self-checking and check the voltage of battery.)
VI.The smart protection functions of ESC.
VII .The routine of throttle shall be set at the first time turn on the ESC.
The feature of Flycolor ESC is to set best routine of throttle according to different transmitters. The ESC can obtain most stable throttle linear response through the total routine of throttle in transmitters. The objective is let the ESC to obtain and remember the output signals of throttle in transmitters. The operation needs to be carried for one time. Please repeat the operation when change transmitters.
Notice: must to check carefully whether polarities of all connector assembly are correct and whether the installation is firm before connect the battery pack during the using to avoid damages to the ESC due to incorrect connection between polarities or short cut.
\ \
The operation when use the ESC for the first time is as follows:
● The normal startup procedure of the ESC is as follows:
Remark: if the motor suddenly stops when your model airplane are flying, you shall immediately push the pull rod of throttle to the lowest position and then push to the high position. Then the motor will restart. You shall land the model airplane immediately with throttle controlled with a lower position.
Please pay attention to the following safety information when using.
●Never disassemble any electro components in the ESC by yourself, or permanent damages or lost of information will occur.
●Check the setting of receiver. Do not install propeller or small driving gear on motor if you haven’t confirm that the setting of receiver is correct when test the ESC and motor for the first time.
●Do not use cracked or broken battery pack.
●Do not use battery pack easily get overheat.
●Do not use short-cut battery.
●Do not use cable insulation material against standards.
●Do not use cable connector against standards.
●The number of battery or servo system shall not exceed the rules for ESC.
●The voltage of battery shall not exceed the scope of working voltage of ESC.
●Pay attention to the polarities of battery. Wrong polarities will damage the ESC.
●Be sure that the ESC will not use in manned craft or other manned machines.
●Do not place the ESC in moist or over exposure.
●Do not take out battery when the motor is working, for the generated large peak current will damage the ESC.
●Do not pack anything outside the ESC. Install the ESC in places with good ventilation and heat dissipation as far as possible.
VIII.Handling of common problems
电机使用说明书
电机使用说明书 Operating Manual 概述 本说明书适用于我公司生产的YX3、YET、Y2、YVP、YD系列低压三相异步电动机及其派生系列产品 Overview The manual serves YX3、YET、Y2、YVP、YD Series low voltage asynchronous motors and it's derivative products as well. 开始使用 Putting into use (starting) 收货检查 Reception check 收到电机后立即检查是否有损坏,如发现请立即拨打电话:0086-21-6463-1777,或发传真至0086-21-6463-7180,检查铭牌数据特别是额定电压、接线方式(星形或三角形)是否与合同订货要求相符,用手转动电机轴检查轴转动是否灵活。 Immediately check the motor for external damage upon receipt and if found, please inform us by telephone or fax without delay (Tel:0086-21-6463-1777, Fax:0086-21-6463-7180). Check all rating plate data, especially voltage and winding connection (star or delta). Turn shaft by hand to check for free rotation. 绝缘电阻检查 Insulation resistance check 在电机调试前或怀疑线圈受潮时要测量电机的绝缘电阻,在25℃时的绝缘电阻值应超过以下表达式的值,表达式中: Measure the motor's insulation resistance before commissioning or when winding dampness is suspected. insulation Resistance, measured at 25°C, shall exceed the following reference value, i.e. where: R:单位兆欧(用500V绝缘电阻表测量)Array U表示电压,单位V P表示功率,单位kW R: MΩ( measured with 500 V dc Megger ) U = voltage, Volts; P = output power, kW. 警告: 测量完绝缘电阻后应立即将测量线从电机上断开,以免线圈再次受到高电压冲击。环境 温度每升高20℃,绝缘电阻将降低一半,如果绝缘电阻值达不到计算值,表明线圈已经
航模无刷电机调速器说明书
航模无刷电机调速器说明书 尊敬的用户:感谢您使用飞盈佳乐有限公司设计、制造的航模无刷马达智能动力控制器(ESC)。因本产品在启动使用时产生的功率强大,错误的使用及操作可能造成人身伤害和设备损坏,我们强烈建议客户在使用本产品前仔细阅读本使用手册,严格按操作规定使用。我们不承担因使用本产品而引起的的任何责任,包括但不限于附带损失或者间接损失的赔偿责任。同时,不承担使用人擅自拆装及修改本产品引起的任何责任和因第三方产品所造成的任何责任。 我们有权不预先通知变更产品,包括外观,性能参数及使用要求;对本产品是否适合使用者特定用途不作任何保证、申明或承诺。 一、航模无刷电机控制器主要特性: ●采用功能强大、高性能MCU处理器,用户可以针对自身需求设置使用功能,充分体现我们产品独具优势的智能特点 ●支持无刷电机无限制最高转速 ●支持定速功能。 ●精心的电路设计,抗干扰性超强 ●启动方式可设置,油门响应速度快,并具有非常平稳的调速线性,兼容固定翼飞机及直升飞机。 ●低压保护阀值可设置 ●内置SBEC,带舵机负载功率大 ●具备多种保护功能:输入电压异常保护/电池低压保护/过热保护/油门信号丢失降功率保护 ●通电安全性能好:接通电源时无论遥控器油门拉杆在任何位置不会立即启动电机 ●过温保护:控制器工作时温度到达120℃时功率输出会自动降低一半,低于120℃时功率输出自动恢复 ●兼容所有遥控器操作设置和支持编程卡设置 ●设置报警音判断通电后工作情况 ●本公司对此产品具备完整知识产权,产品可持续升级更新。并可根据客户的需求量身定制产品。 调速器产品规格 1)OPTO调速器没有内置BEC, 工作时需单独给舵机、接收机供电 2)S BEC调速器,给舵机供电是开关电源模式,输出电压5.5V,舵机可以带4A负载,瞬间2秒可达8A 3)UBEC调速器,给舵机供电是线性电源模式
直流无刷电机驱动说明书
BLDC SERVO DRIVERS 无刷直流调速驱动器 使用手册1.3 系统上电前请仔细阅读手册 DBLS-01系列 直流无刷电机驱动说明书 一、概述 本控制驱动器为闭环速度型控制器,采用最近型IGBT和MOS功率器,利用直流无刷电机的霍尔信号进行倍频后进行闭环速度控制,控制环节设有PID速度调节器,系统控制稳定可靠,尤其是在低速下总能达到最大转矩,速度控制范围150~6000rpm。 二、特点 1、PID速度、电流双环调节器 2、高性能低价格 3、20KHZ 斩波频率 4、电气刹车功能,使电机反应迅速 5、过载倍数大于2,在低速下转矩总能达到最大 6、具有过压、欠压、过流、过温、霍尔信号非法等故障报警功能 三、电气指标 标准输入电压:24VDC\36VDC\48VDC 三种 最大输入过载保护电流:5A\15A两种 加速时间常数出厂值:0.2秒其他可定制 四、端子接口说明
1、电源输入端 引角序号引角名中文定义 1 V+ 直流+24V输入 2 GND 直流0V输入 2、电机输入端 引角序号引角名中文定义 1 MA 电机A相 2 MB 电机B相 3 MC 电机C相 4 GND 地线 5 HA 霍尔信号A相输入端 6 HB 霍尔信号B相输入端 7 HC 霍尔信号C相输入端 8 +6.25 霍尔信号的电源线 3、控制信号部分 GND:信号地 F/R:正、反转控制,接GND反转,不接正转,正反转切换时,应先关断EN EN:使能控制:EN接地,电机转(联机状态),EN不接,电机不转(脱机状态) BK:刹车控制:当不接地正常工作,当接地时,电机电气刹车,当负载惯量较大时,应采用脉宽信号方式,通过调整脉宽幅值来控制刹车效果。 SV ADJ:外部速度衰减:可以衰减从0~100%,当外部速度指令接6.25V时,通过该电位器可以调速试机 PG:电机速度脉冲输出:当极对数为P时,每转输出6P个脉冲(OC门输入) ALM:报警输出:当电路处于报警状态时,输出低电平(OC门输出) +6.25V:调速电压输出,可用电位器在SV和GND形成连续可调 拔码开关说明:四个档位为OFF时,电机不运行,SW1为ON状态时,电机转速为100%,SW2为ON状态时,电机转速为80%,SW3为ON状态时,电机转速为40%,SW4为ON状态时,电机转速为20%。 4.机械安装:
电动车无刷马达控制器硬件电路详解
电动车无刷马达控制器硬件电路详解 电动车无刷电机是目前最普及的电动车用动力源,无刷电机以其相对有刷电机长寿,免维护的特点得到广泛应用,然而由于其使用直流电而无换向用的电刷,其换向控制相对有刷电机要复杂许多,同时由于电动车负载极不稳定,又使用电池作电源,因此控制器自身的保护及对电机,电源的保护均对控制器提出更多要求。 自电动车用无刷电动机问世以来,其控制器发展分两个阶段:第一阶段为使用专用无刷电动机控制芯片为主组成的纯硬件电路控制器,这种电路较为简单,其中控制芯片的代表是摩托罗拉的MC33035,这个不是这里的主题,所以也不作深入介绍。第二阶段是以MCU为主的控制芯片。这是这篇文章介绍的重点,在MCR版本的设计中,揉和了模拟、数字、大功率MOSFET 驱动等等许多重要应用,结合MCU智能化控制,是一个非常有启迪性的设计。 今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1: 整机电路看起来很复杂,我们将其简化成框图再看看:
图2:电路框图 电路大体上可以分成五部分: 一、电源稳压,供应部分; 二、信号输入与预处理部分; 三、智能信号处理,控制部分; 四、驱动控制信号预处理部分; 五、功率驱动开关部分。 下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。 图3:PIC16F72在控制器中的各引脚应用图 我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振
荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT 的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。内部软件资源我们在软件部分讲解,这里并不需要很关心。 各引脚应用如下: 1:MCLR复位/烧写高压输入两用口 2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。正常运转时电压应在0-1.5V左右 3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。正常时电压应在 3V以上 4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。 5:模拟/数字量输入口:刹车信号电压输入口。可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。 6:数字量输入口:1+1助力脉冲信号输入口,当骑行者踏动踏板使车前行时,该口会收到齿轮传感器发出的脉冲信号,该信号被单片机接收到后会给电机输出一定功率以帮助骑行者更轻松地往前走。 7:模拟/数字量输入口:由于电机的位置传感器排列方法不同,该口的电平高低决定适合于哪种电机,目前市场上常见的有所谓120°和60°排列的电机。有的控制器还可以根据该口的电压高低来控制起动时电流的大小,以适合不同的力度需求。 8:单片机电源地。 9:单片机外接振荡器输入脚。 10:单片机外接振荡器反馈输出脚。 11:数字输入口:功能开关1 12:数字输入口:功能开关2 13:数字输出口:PWM调制信号输出脚,速度或电流由其输出的脉冲占空比宽度控制。 14:数字输入口:功能开关3 15、16、17:数字输入口:电机转子位置传感器信号输入口,单片机根据其信号变化决定让电机的相应绕组通电,从而使电机始终向需要的方向转动。这个信号上面讲过有120°和60°之分,这个角度实际上是这三个信号的电相位之差,120°就是和三相电一样,每个相位和前面的相位角相差120°。60°就是相差60°。 18:数字输出口:该口控制一个LED指示灯,大部分厂商都将该指示灯用作故障情况显示,当控制器有重大故障时该指示灯闪烁不同的次数表示不同的故障类型以方便生产、维修。 19:单片机电源地。 20:单片机电源正。上限是5.5V。 21:数字输入口:外部中断输入,当电流由于意外原因突然增大而不在控制范围时,该口有低电平脉冲输入。单片机收到此信号时产生中断,关闭电机的输出,从而保护重要器件不致损坏或故障不再扩大。 22:数字输出口:同步续流控制端,当电流比较大时,该口输出低电平,控制其后逻辑电路,使同步续流功能开启。该功能在后面详细讲解。 23--28:数字输出口:是功率管的逻辑开关,单片机根据电机转子位置传感器的信号,由这里输出三相交流信号控制功率MOSFET开关的导通和关闭,使电机正常运转。
电机使用说明书
电机使用说明书 Operati ng Manual 概述 本说明书适用于我公司生产的 YX3 YET 丫2、YVP YD 系列低压三相异步电动机及其派 生系列产品 Overview The manual serves YX3 YET Y2、YVP YDSeries low voltage asynchronous motors and it's derivative products as well. 开始使用 Putt ing into use (start ing) 收货检查 Recepti on check 收到电机后立即检查是否有损坏,如发现请立即拨打电话: 0086-21-6463-1777,或发 传真至0086-21-6463-7180,检查铭牌数据特别是额定电压、接线方式(星形或三角形) 是否与合同订货要求相符,用手转动电机轴检查轴转动是否灵活。 Immediately check the motor for exter nal damage upon receipt and if found, please inform us by telepho ne or fax without delay (Tel:0086-21-6463-1777, Fax:0086-21-6463-7180). Check all rating plate data, especially voltage and winding connection (star or delta). Turn shaft by hand to check for free rotati on. 绝缘电阻检查 In sulatio n resista nee check 在电机调试前或怀疑线圈受潮时要测量电机的绝缘电阻, 在25C 时的绝缘电阻值应超过 以 下表达式的值,表达式中: Measure the motor's in sulati on resista nee before commissi oning or whe n wi nding damp ness is suspected. in sulati on Resista nee, measured at 25 P = output power, kW. 警告. 温度每升高20C,绝缘电阻将降低一半,如果绝缘电阻值达不到计算值, 表明线圈已经 C, shall exceed the followi ng refere nee value, i.e. where R:单位兆欧(用500V 绝缘电阻表测量) U 表示电压,单位V P 表示功率,单位kW R: M Q ( measured with 500 V dc Megger ) U = voltage, Volts; R= 1000+ P 100 测量完绝缘电阻后应立即将测量线从电机上断开, 以免线圈再次受到高电压冲击。环境
超静音智能型无刷电动车控制器接线说明
、超静音智能型无刷电动车控制器接线说明: 1、电源线为6.3-3AY三根线,红,红,黑。接48v电压。 2、电机线为黄,绿,蓝三根线,一般情况是相应的颜色接相应的线,如果转的声音很大,可以把这三根线调换位置接一下。 3、霍尔信号线为2.8-6AY五根线,一般情况是相应的颜色接相应的线。红,黑,黄,绿,蓝。 4、反相充电为2.8-2AY二根线,红,黑。 5、调速线为sm-3AY三根线,红,黑,灰。 6、1:1助力线为sm-3AY三根线,红,黑,绿。 8、刹车线为sm-2AY二根线,黑,紫。 7、巡航线相当于转把线sm-2AY二根线,红,黑。 9、限速线为二根单独的白色线,当把这二根线接上时,无论转把转的位置多大,速度也不会变快,保持一定速度。 10、 ABS为二根单独的绿色线,当把这二根线接上时,按下刹车,电动自行车的电机马上停转,如果不接,滑行时按下刹车,由于惯性,会向前滑行一段距离。 首先电动车要转起来,基本的连线就是电机相线(三根线:黄、绿、蓝)接上控制相线(三根线:黄、绿、蓝)、电机霍尔线(五根线:红、黑、黄、绿、蓝)接上控制器霍尔线(五根线:红、黑、黄、绿、蓝),电池(两根线加AAC线:红、红、黑)接上控制器的电源端子(两根线加AAC线:红、红、黑),调速把接控制器的调速端子,接好这四个基本连线(还要考虑相序问题),就可以转起来了。 另外还有助力线(三根:红、黑、白),限速端子等。其他的功能线可以通过合端子分辩出来。深圳市士金技术的电动车检修匹配仪可以用来检修和帮助接线。1分20秒可以从36种接法中选出最佳接线方式。 中国惯用(通用)的颜色:主电源线黑色-负极,红色+正极(最粗的那两根根)比这两根稍稍细点的一般是充电线路,注意红黑不能接错,不然严重的烧毁车子,运气好的话烧毁线路。粗点,硬的三根线(一般为黄蓝绿三色)是电机线,作用是相位线,可以随便接,主要是转的方向要注意,不然就有了倒车功能了呵呵,和这三根线在一起的是五根小线,红黑在上面两个是电源线不能接反颜色要一致,下面三根黄蓝绿是信号线(也叫:霍尔线)可以随便接,原理与三根电机线一样。其他的线路要通过万用表测量,分别是:喇叭,大灯,转向灯,尾灯,刹车灯,有些带助力的还有助力线。颜色各个厂家采用的不一样,只有通过万用表测。 无刷电动车控制器接线说明 1.电源输入 粗红色线为电源正端黑色线为电源负端细橙色线为电门锁
无刷电机电子调速器使用说明书
__________________________________________________________________________________ 感谢您购买了EASYCO无刷电机电子调速器。这款产品是专为遥控航模所设计的。因为大功率输出的遥控模型的危险性,我们强力建议您在使用这款产品前一定仔细的阅读产品说明。 安全建议! 1.所有的EASYCO遥控模型产品仅适于成年人使用。 2.在您连接电池线之前,确保其它的连接线正确连接。 3.EASYCO TECHNOLOGY不承担任何由使用本产品而引起的直接或间接的损害、伤害的赔偿责 任。 4.当模型和动力系统相连时必须和操控者及其它人保持足够的安全距离。 5.在远离人群的地方飞行。 6.了解当地对于遥控模型飞行的相关法律条例。 产品特点: 1.进角自动调整,无需设置。 2.极其轻微的启动过程。最低到3%的动力输出就可以平滑启动。平滑启动并保持足够的扭矩。 3.最好的油门曲线和最大的油门行程范围。 4.周全细致的保护功能:包括低电压保护\过热保护\油门信号丢失保护\安全上电保护\缺相保护\堵 转保护。 ●启动快慢完全由油门控制。在运转过程中只有堵转、缺相才会立即保护停机。停机后,油 门需回位才可重起。 ●较好的低电压保护模式。逐步降低动力输出以尽量维持电压在保护设定值之上。当降到30% 功率时,将停机。 ●当温度超过保护值时,降低功率,降低速率由温升速率决定。 ●信号丢失在3秒内降到20%功率后停机。 ●安全上电保护。接通电源时无乱遥控杆在何位置皆可保证电机不会启动,确保安全。 5.较为简单的参数设定。 产品规格: 型号持续电流输入电压BEC形式BEC输出重量(g)尺寸(mm) 4568X30X10.5 FS-7070A2-6LiPo开关5V、6V可 调/3A FS-6060A2-6LiPo开关5V、6V可 4168X30X10.5 调/3A 3764X30X10.5 FS-4545A2-6LiPo开关5V、6V可 调/3A FS_3560A2-6LiPo开关5V、6V可 3159X30X10.5 调/3A 3352X29X9 F-4545A2-4LiPo线性5V、6V可 调/3A F-3535A2-4LiPo线性5V、6V可 3252X29X9 调/2A F-3030A2-4LiPo线性5V/2A2548X25X11注意:电调自带BEC不支持四节和四节以上锂电(或其他相当电压的电池)
电动车无刷电机控制器软件设计详解
电动车无刷电机控制器软件设计详解作者:谢渊斌原作发表在《电子报2007年合订本》下册版权保留,转帖请注明出处本文以MICROCHIP公司所生产的PIC16F72为基础说明软件编程方面所涉及的要点,此文所涉及的源程序均以PIC的汇编语言为例。由于软件不可避免需与硬件相结合,所以此文可能出现硬件电路图或示意图。本文适合在单片机编程方面有一定经验的读者,有些基础知识恕不一一介绍。我们先列一下电动车无刷马达控制器的基本要求:功能性要求:1.电子换相2.无级调速3.刹车断电4.附加功能a.限速b.1+1助力c.EBS柔性电磁刹车d.定速巡航e.其它功能(消除换相噪
音,倒车等)安全性要求:1.限流驱动2.过流保护3.堵转保护3.电池欠压保护4.节能和降低温升5.附加功能(防盗锁死,温升限制等)6.附加故障检测功能从上面的要求来看,功能性要求和安全性要求的前三项用专用的无刷马达驱动芯片加上适当的外围电路均不难解决,代表芯片是摩托罗拉的MC33035,早期的控制器方案均用该集成块解决。但后来随着竞争加剧,很多厂商都增加了不少附加功能,一些附加功能用硬件来实现就比较困难,所以使用单片机来做控制的控制器迅速取代了硬件电路芯片。但是硬件控制和软件控制有很大的区别,硬件控制的反应速度仅仅受限于逻辑门的开关速度,而软件的运
行则需要时间。要使软件跟得上电机控制的需求,就必须要求软件在最短的时间内能够正确处理换相,电流限制等各种复杂动作,这就涉及到一个对外部信号的采样频率,采样时机,信号的内部处理判断及处理结果的输出,还有一些抗干扰措施等,这些都是软件设计中需要再三仔细考虑的东西。PIC16F72是一款哈佛结构,精简指令集的MCU,由于其数据总线和指令总线分开,总共35条单字指令,0-20M的时钟速度,所以其运算速度和抗干扰性能都非常出色,2K 字长的FLASH程序空间,22个可用的IO 口,同时又附加了3个定时/计数器,5个8位AD口,1个比较/捕捉/脉宽调制器,8个
电机使用方法
L298N模块介绍 L298N是专用驱动集成电路,属于H桥集成电路,与L293D的差别是其输出电流增大,功率增强。其输出电流为2A,最高电流4A,最高工作电压50V,可以驱动感性负载,如大功率直流电机,(二相、三相、四相)步进电机,伺服电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。当驱动直流电机时,可以直接控制两路电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。 本模块具有体积小,控制方便的特点。采用此模块定会使您的电机控制自如,可以应对需要大功率直流电机的题目。 直流电机使用说明: 板上的EN1与EN2为高电平时有效,只有当EN1与EN2为高电平时,电机才旋转,否则电机不转,这里的电平指的是TTL电平。EN1为IN1和IN2的使能端,EN2为IN3和IN4的使能端。当EN1=1,IN1=1 INT2=0时电机1正转,EN1=1,IN1=0 IN2=1电机1反转。同理,当EN2=1,IN3=1 IN4=0电机2正转,EN2=1,IN3=0 IN4=1电机2反转。A-、B-接电机1,C-、D-接电机2。 步进电机使用说明: 板上的EN1与EN2为高电平时有效,这里的电平指的是TTL电平。EN1为IN1和IN2的使能端,EN2为IN3和IN4的使能端。 步进电机控制逻辑如下所示,其中A-、B-、C-、D-为步进电机的四个线圈,(以四相步进电机为例)。 L298N是SGS公司的产品,内部包含二个H桥的高电压大电流桥式驱动器,接收标准TTL逻辑电平信号,可驱动46伏、2安培以下的电机,工作温度范围从-25度到130度。其内部的一个H桥原理图如图1所示。EnA是控制使能端,控制OUTl和OUT2之间电机的停转, IN1、IN2脚接入控制电平,控制OUTl和OUT2之间电机的转向。当使能端EnA有效,IN1为低电平IN2为高电平时,三极管2,3导通,1,4截止,电机反转。当IN1和IN2电平相同时,电机停转。表1是其使能引脚,输入引脚和输出引脚之间的逻辑关系。
通用型无刷电机控制器接线说明
刷电动车控制器接线说明 1.电源输入 粗红色线为电源正端黑色线为电源负端细橙色线为电门锁 2.电机相位(u、v、w输出) 粗黄色线为U 粗绿色线为V 粗蓝色线为W 3.转把信号输入 细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线 4.电机霍耳(A、B、C输入) 细红色线为+5V电源细黑色线为接地线 细黄色线为 A 细绿色线为 B 细蓝色线为 C 5.刹车(柔性EABS+机械刹) 细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V) 细黑色线为接地线(低电平刹车) 6.传感器 细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入 7.仪表(转速):细紫色线 8.巡航:细棕色线 9.限速:细灰色线 10.自动识别开关线:细黄色线 PIC16F72智能型无刷电动车控制器使用方法和注意事项 1、在接线前先切断电源,按接线图所示连接各根导线; 2、该控制器应安装在通风、防水、防震部位。 3、控制器限速控制插头应放置容易操作的地方。 4、控制器接插件应接插到位,禁止将控制器电源正负极反接(即严禁粗红、细橙和粗黑;细红和细黑接反)。 5、电机模式自动识别:正确接好电动车控制器的电源、转把、刹把等线束,,将电机识别模式开关线(细黄)短接,打开电门锁,使电机进入自动识别状态,若电机反转则按一下刹车即可使电机正向转动,在控制器识别电机模式10秒后将电机识别模式开关线(细黄)直接断开即可完成电机模式自动识别。 6、1+1助力方向调整:在通电状态,将调速电阻从最大值调到最小值,再回到原始状态后,可将1+1助力的方向从正向模式切换到反向模式,再调整一次可从反向模式切换到正向模式,并将最终的模式存入单片机
YCT电机调速器说明书
JD1、JD2系列控制器是机械工业部全国联合设计的最新产品,已通过部级鉴定,用作JZT,YCT系列电磁调速电机的控制设备,操作控制器面板上的旋钮,可实现电机宽范围无级调速,当负载为风机和泵类时,节电效果显著,可达20~30%,是我国目前推广的节能产品之一。 一、品种和主要技术数据 手操普通型(JD1A为指针式,JD2A为数显式): 二、使用环境 最高环境温度不超过40℃,海拨不超过1000米,相对湿度不超过90%,适用于少灰尘、无腐蚀性、爆炸性气体的场合。 三、工作原理 JD1、JD2系列电磁调速电动机控制器是由速度调节器、移相触发器、可控硅整流电路及负反馈等环节所组成。 JD1A与JD2A原理相同,速度指令信号电压和速度负反馈信号电压比较后,其差值信号被送入速度调节器进行放大。放大后的信号电压与锯齿波叠加,控制了晶体管GB1的导通时刻,随着差值信号电压改变移动脉冲,从而控制了可控硅的开放角,使滑差离合器的激磁电流随着变化,即滑差离合器的转速随着激磁电流的改变而改变。 四、结构与按装接线
JD1A、JD2A系列电磁调速电动机控制器的结构为塑壳密封结构,具有IP5X的防尘等级,可用于面板嵌入式或墙挂式安装,底部进线。其外型尺寸、安装方式和和联并接线如图 五、调整与试运行 1、JD1A、JD2A按(图1)接线,输出端(3)、(4)接入离合器线圈或接入100W 的照明灯泡做摸拟负载,并在输出端接入100V以上的直流电压表。 2、接通电源,指示灯亮,当转动速度指令电位器W1时,输出端应有0~90V的突跳电压(因测速负反馈未加入时的开环放大倍数很大,则认为开环时工作基本正常)。 3、起动交流异步电动机,使系统闭环工作。 a、转速表的校正(适用于JD1A,JD2A跳过此项操作):由于每台测速发电机的电压都不同,故转速表上的指示值必须要根据实际转速进行校正。当离合器运转在某一转速时,用轴测式转速表或数字转速表测量其实际转速,当出现转速表的指示值与测得的实际转速不一致时,调节“转速表校准”电位器,使之一致。 b、最高转速整定;此整定方法就是对速度反馈量的调节,将速度指令电位器顺时针方向调节至最大,并调节“反馈量调节”电位器,使之转速达到滑差电机的最高额定转速(小容量为1250转/分,大容量为1320转/分)。 4、运行中,当加入负载后发现转速有周期性的摆动,可将输出端(3)、(4)交换连接。 电气参数: ?调速范围125-1320转/分 ?控制电机功率0.55-40KW ?转速变化率≤3% ?稳速精度≤1% ?电源电压AC220V
无刷电机工作及控制原理(图解)
无刷电机工作及控制原理(图解) 左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。 让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。不信可以试试。 三相线分开,电机可以轻松转动 三相线合并,电机转动阻力非常大 右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1 当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。 当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。注意这里说的是“力矩”最大,而不是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。补充一句,力矩是力与力臂的乘积。其中一个为零,乘积就为零了。 当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,
电动机使用说明书
目录 第1章概述 (3) 1.1说明 (3) 1.2电动机概述 (3) 1.2.1 基本技术参数及要求 (3) 1.2.2 结构概述 (4) 第2章运输与储存 (5) 2.1运输 (5) 2.2吊装电动机 (5) 2.2.1 吊装一般电动机 (5) 2.2.2 吊装带安装底板的电动机 (5) 2.2.3 吊装立式电动机 (5) 2.3拆箱 (5) 2.4储存 (6) 第3章安装及调整 (7) 3.1安装前的准备 (7) 3.1.1 检查 (7) 3.1.2 联轴器的组装 (7) 3.2安装 (8) 3.3调正 (8) 3.4绝缘性能测试 (8) 3.4.1 用兆欧表测量定子和转子的绝缘电阻 (8) 3.4.2 干燥处理 (9) 第4章机械和电气 (10) 4.1机械连接 (10) 4.1.1 冷却器连接 (10) 4.1.2 滑动轴承供油 (10) 4.2电气连接 (10) 4.2.1 接线 (10)
4.2.2 电气及附属设备检查 (10) 第5章起动及停车 (12) 5.1试起动 (12) 5.2转动方向 (12) 5.3起动与停车 (12) 第6章日常维护 (13) 6.1润滑 (13) 6.1.1 滚动轴承的润滑 (13) 6.1.2 滑动轴承的润滑 (13) 6.2振动和噪音 (13) 6.3湿度 (13) 6.4温度 (13) 6.5绝缘电阻的最小值 (14) 6.6轴承的更换 (14) 6.7定期检查 (15) 第7章常见故障及原因分析 (16)
第1章概述 1.1 说明 本说明书为我公司电动机的随机文件。其中介绍了电动机的结构、储运、安装的要求和注意事项,以及使用、维护电动机的要求、方法和注意事项,使用维护人员必须认真阅读此说明书。认真审阅电动机上的铭牌、标牌、警示牌等。使用单位应对操作人员进行专业培训后,方能上岗作业。 只有严格按照本使用说明书、铭牌、标牌、接线牌和警示牌进行安装、使用和维护电动机,我公司才承担相关“三包”责任。 本说明书不可能包括安装、使用和维护方面一切可能发生的问题,如果所发生的问题未包括在本使用说明书和其他随机资料中,用户自己又难以解决,请与本公司联系。 注意:为保证设备安全和正确的安装、操作和维护,请务必遵守本说明书的相关条款。负责安装操作或维护设备的人员应注意相关说明,忽视说明将会使质保失效。 1.2 电动机概述 三相异步电动机其功率等级、安装尺寸和电气性能指标均符合国家制定的相关技术标准或我公司的企业标准。 该电动机具有高效、节能、噪声低、振动小、结构紧凑、运行安全可靠、安装维护方便等特点,适用于一般用途的各种机械,如风机、压缩机、水泵、磨机和破碎机等作原动机用。 1.2.1 基本技术参数及要求 ?电动机的额定频率为50Hz或60Hz。 ?额定电压为10000V、6000V、3000V、690V、660V、380V或其他电压。 ?额定工作方式一般为连续工作制(S1)。 ?安装型式为IMB3、 IMB35、IMV1 (或按技术协议规定)。 ?外壳防护等级一般为IP23、IP44或IP54 (或按技术协议规定)。 ?电动机的冷却方式一般为IC01、IC06、IC611、IC666、IC81W、IC411、IC416、IC616、IC86W等。 ?主出线盒内3个出线端子标志为U.V.W。如有特殊情况,请参见产品外形图或电机接线图。 ?电动机的旋转方向可参照出厂外形图或电机上的标示选定。 ?电动机安装地点海拔一般不超过1000m,最高环境空气温度不超过40℃,最低环境空气温度对采用滚动轴承的电动机不低于-15℃,对采用滑动轴承的电动 机为0℃。对一般电动机,环境相对湿度不大于90%,对TH型电动机,相对 湿度不大于95%。
无刷电机控制器基本原理
无刷电机控制器基本原理 电动车采用的电机分有刷电机和无刷电机两种,由于无刷电机具有噪声低、寿命长的特点,因而在电动车中获得比较广泛应用。无刷电机的控制器要比有刷电机控制器复杂得多,在维修上有一定的难度,因此,本文从无刷控制器的原理入手介绍维修要点,以期对广大维修爱好者有所帮助。 基本原理 电动车无刷控制器主要由单片机主控电路、功率管前级驱动电路、电子换向器、霍尔信号检测电路、转把信号电路、欠电检测电路、限流/过流检测电路、刹车信号电路、限速电路、电源电路等部分组成,其原理框图如图1所示,下面介绍主要电路的工作原理。 1. 电子换向器 无刷电机与有刷电机的根本区别就在于无刷电机用电子换向器代替了有刷电机的机械换向器,因而控制方法也就大不相同,复杂程度明显提高。在无刷电机控制器中,用6个功率MOSFET管组成电子换向器,其结构如图2所示。图中MOSFET管VT1、VT4构成无刷电机A相绕组的桥臂,VT3、VT6 构成无刷电机B相绕组的桥臂,VT5、VT2构成无刷电机C相绕组的桥臂,在任何情况,同一桥臂的上下两管不能同时导通,否则要烧坏管子。 6只功率MOSFET管按一定要求顺次导通,就可实现无刷电机A、B、C三相绕组的轮流通电,完成换相要求,电机正常运转。在电动车无刷电机控制器中,这6只功率管有二二通电方式和三三通电方式的运用,二二通电方式即每一瞬间有两只功率管同时通电,三三通电方式即每一瞬间有三只功率管同时通电。对于二二通电方式,功率管须按VT1、VT2;VT2、VT3;VT3、VT4;VT4、VT5;VT5、VT6;VT6、VT1;VT1、VT2??的通电顺序,电机才能正常运转。对于三三通电方式,功率管须按VT1、VT2、VT3;VT2、VT3、VT4;VT3、VT4、VT5;VT4、VT5、VT6;VT5、VT6、VT1;VT6、VT1、VT2;VT1、VT2 、VT3??的次序通电,电机才能正常运转。 2. 功率管前级驱动电路
jda-40电磁调速电机控制器说明书
JD1A-40电磁调速电机控制器 产 品 使 用 说 明 书 江苏省泰州市耐特调速电机有限公司
JDIA-40型电磁调速电动机控制器是原机械工业部全国联合统一设计产品,用于电磁调速电动机(滑差电机)的调速控制。实现恒转矩无级调速,当负载为风机和泵类时,节电效果显著,可达10%~30%,是我国目前推广的节能产品之一。 1、型号含义: 2、使用条件: 2.1、海拔不超过1000m 。 2.2、周围环境温度;-5℃-+40℃。 2.3、相对湿度不超过90%(20℃以下时)。 2.4、振动频率10-15OHz 时,其最大振动加速度应不超过0.5g 。 2.5、电网电压幅位波动±10%额定值时、保证额定使用。 2.6、周围介质没有导电尘埃和能腐蚀金属和破坏绝缘的气体。 3、主要技术数据: 3.1调速范围: 电源为50Hz 时:1250~125转/分60Hz 时:1500~150转/分 3.2转速变化率(机械特性硬度)≤2.5% 100%100%%10X 额定最高速度负载下是转速—负载下的转速转速变化率= 3.3稳速精度:≤1% 3.4最大输出:直流90V 3.5控制电机功率:0.55~40KW 3.6测速发动机三相2V ≤3.5V/100r .p.m 。 4.基本工作原理:
JD1A—40电磁调速电动机控制装置是由速度调节器、移相触发器、可控硅整流电路及速度负反馈等环节所组成。 图1为装置原理方框图。图2为装置的电气原理图。图3为装置的移相触发各点波形图。从图1-图4可知,二种线路的工作原理都是相同的。速度指令信号电压和调速负反馈信号电压比较后,其差值信号被送入速度调节器(或前置放大器)进行放大,放大后的信号电压与锯齿波叠加,控制了晶体管的导通时刻,产生了随着差值信号电压改变而移动的脉冲,从而控制了可控硅的开放角,使滑差离合器的激磁电流得到了控制,即滑差离合器的转速随着激磁电流的改变而改变。由于速度负反馈的作用,使电磁调速电动机实现恒转矩无极调速。 从图2-图3可知,JD1A—40型的速度指令信号电压是由装在控制箱面板上的速度操作电位器产生的。 5.结构、安装接线说明与注意事项: 5,1控制器的结构为塑料密封结构。具有IP5X的防尘等级,可用于面板嵌入式或墙挂式安装,底部进线,接线如图5,其外形尺寸安装方法如图4图6所示。 5.2安装使用前,须用500伏兆欧表检查控制器绝缘电阻,其阻值不应低于1兆欧,如达不到要求须进行干燥,干燥温度不应超过45℃,以免损坏元件。 5.3在拖动电机未起动情况下,不要单独操作控制器,以免控制器或烧毁调速电动机激磁线圈。 6.调整与试运行: 6.1检查熔断丝规格及转速表指针是否在零位。接线是否正确。 6.2接通电动机电源、检查旋转方向是否与被托动机械一致 6.3试车时。先起动异步电动机,再接通控制器电源,指示灯亮,旋动调速旋钮,此时转速表上读数逐渐上升,根据需要可将转速调至某一数值稳定下来。6.4转速表指示值校正,按顺时针方向转动给定电位器W1与任意位置,用机械转速表或其他仪表检查调速电机的实际转速与转速表指示值,不一样时调校表电位器W3。 6.5按顺时针方向转动给定电位器W2至最大时,调节反馈电位器W2使转速表符合表1的规定。
电动机安装说明书
电动机安装说明书 Prepared on 22 November 2020
CJ系列电动机操动机构 安装使用说明书 江苏省如高高压电器有限公司 2014年10月
目录 1 概述……………………………………………………………………………………………… 产品型号和名称………………………………………………………………………………… 产品用途和适用范围…………………………………………………………………………… 本设备制造执行的标准………………………………………………………………………… 使用环境条件…………………………………………………………………………………… 2 主要规格及技术参数…………………………………………………………………………… 3 产品结构与工作原理…………………………………………………………………………… 产品结构………………………………………………………………………………………… 工作原理………………………………………………………………………………………… 4 安装和调试……………………………………………………………………………………… 安装前检查……………………………………………………………………………………… 安装步骤………………………………………………………………………………………… 产品调试………………………………………………………………………………………… 安装注意事项…………………………………………………………………………………… 5 操作与运行……………………………………………………………………………………… 电动分合闸及停止操作…………………………………………………………………………
JD1A电磁调速电动机控制器使用说明书
JD1A电磁调速电动机控制器使用说明书 1.资料图片: JD1A电磁调速电动机控制器是原机械工业部全国联合(统一)设计产品,用于电磁调速电动机(滑差电机)的调速控制,实现恒转矩无级调速。 2.正常工作条件 2.1 海拔不超过1000m; 2.2 周围环境温度:-10℃~ +40℃; 2.3 相对湿度不超过90%(20℃以下时); 2.4 振动频率10~15Hz时,其最大振动加速度应不超过0.5g; 2.5 周围空气中没有导电尘埃和能腐蚀金属和破坏绝缘的气体。
4.结构、安装接线与注意事项 4.1 控制器为塑料密封结构,具有IP5X的防尘等级,可用于面板嵌入式墙挂式安装,底部进线,接线如下图(如果测速发电机为单相发电机,只有两个线头,请接插头的第6、第7脚、空第5脚)。
4.2接线 控制器外接线7条,是用P型插头与电机相连接,插头正面有标号,①、②为控制器电源220V,①为相线(火线)必须接至接触器下端(防止停电又来电时瞬间电压把控制器击坏)。②为零线。③、④接至电机前端励磁绕组F1、F2。 ⑤、⑥、⑦接至电机前端测速发电机上U、V、W。 4.3先检查接线是否正确,确认后启动电机,再接通控制器电源,指示灯亮旋动调速旋钮,此时转速表上读数逐渐上升,根据需要转速稳定下来。 4.4关机 先把调速旋钮调回零位,关掉控制器电源(注意:必须关掉电源,以免损坏),再关掉电机。 5、调整与试运行 5.1转速表指示值校正。顺时针方向转动给定电位器RP1于任意位置,用机械转速或其它仪表检查调速电机的实际转速,若实际转速与转速表指示值不一致,调速校表电位器RP3。 5.2顺时针方向转动给定电位器RP1至最大,调节反馈电位器RP2,使转速电机铭牌所标上限转速一致。(一般1200转/分~1320转/分)
无刷直流电机驱动器说明书
无刷驱动器DBLS-02 一概述: 本控制驱动器为闭环速度型控制器,采用最近型IGBT和MOS功率器,利用直流无刷电机的霍尔信号进行倍频后进行闭环速度控制,控制环节设有PID速度调节器,系统控制稳定可靠,尤其是在低速下总能达到最大转矩,速度控制范围150~10000rpm。 二产品特征: 1、PID速度、电流双环调节器 2、高性能低价格 3、20KHZ斩波频率 4、电气刹车功能,使电机反应迅速 5、过载倍数大于2,在低速下转矩总能达到最大 6、具有过压、欠压、过流、过温、霍尔信号非法等故障报警功能 三电气指标 标准输入电压:24VDC~48VDC,最大电压不超过60VDC。最大输入过载保护电流:15A、30A两款连续输出电流:15A 加速时间常数出厂值:秒其他可定制 四端子接口说明: 1、电源输入端: 引角序号引角名中文定义 1V+直流+24~48VDC输入 2GND GND输入 引角序号引角名中文定义 1MA电机A相 2MB电机B相
3MC电机C相 4GND地线 5HA霍尔信号A相输入端 6HB霍尔信号B相输入端 7HC霍尔信号C相输入端 8+5V霍尔信号的电源线 G ND:信号地F/R:正、反转控制,接GND反转,不接正转,正反转切换时,应先关断EN E N:使能控制:EN接地,电机转(联机状态),EN不接,电机不转(脱机状态)B K:刹车控制:当不接地正常工作,当接地时,电机电气刹车,当负载惯量较大时,应采用脉宽信号方式,通过调整脉宽幅值来控制刹车效果。S V ADJ:外部速度衰减:可以衰减从0~100%,当外部速度指令接时,通过该电位器可以调速试机P G:电机速度脉冲输出:当极对数为P时,每转输出6P个脉冲(OC门输入)A LM:报警输出:当电路处于报警状态时,输出低电平(OC门输出)+5V:调速电压输出,可用电位器在SV和GND形成连续可调内置电位器:调节电机速度增益,可以从0~100%范围内调速。 五驱动器与无刷电机接线图 六机械安装: