基于控制l函数的非线性不确定系统的镇定
基于控制Lyapunov函数
的非线性不确定系统的镇定
康云霞
摘要:本文主要对CLF的概念性质,及其近年来应用研究的进展予以综述,首先介绍CLF的概念和相关的主要结论,然后介绍了CLF在非线性控制设计中的应用,基于鲁棒控制lyapunov函数的定义给出一个函数为RCLF的等价条件而获得该系统可鲁棒稳定的条件,以例子仿得以验证。
关键词: 非线性系统控制lyapunov函数结构不确定鲁棒镇定
Abstract:This paper focuses on the concept of CLF properties, and their recent research progress in application shall, first of all introduced the concept of CLF and related main conclusions, and then introduced the CLF in nonlinear control design, the application of robust control based on lyapunov function definition given a function for RCLF equivalent conditions for the system robust stability conditions, with examples to verify imitation
Keywords nonlinear system control lyapunov function the structure is not sure robust stabilization
一、引言
非线性控制理论具有十分重要的理论研究意义,更具有极为广泛的实际应用价值。20世纪80年代以来,非线性控制系统的分析取得了很多成果,建立了微分几何学,非线性算子等许多卓有成效的研究方法,在此基础上,原先仅仅应用于非线性系统进行分析的理论逐渐被应用到系统的设计中去。这种现象被控制界成为“活化过程”[3]
CLF(control lyapunov Function)的概念便是一个突出的范例。众所周知,lyapunov方法在微分方程稳定性理论的建立和发展过程中起了决定性的作用. CLF方法基于传统的Lyapnnov函数方法将控制量引入Lyapunov函数的正则性,使得Lyapunov方法从经典的验证和判定方法成为一种有效的设计工具,从而日益显示出重要的应用价值.同时也为许多复杂非线性系统的设计问题提供了一种新的思路。
上世纪80年代分别由Artstein[2]和Sontag[3][引入CLF的概念。随后,Sontag,Isidori,Teel和Kokotovic等一批世界著名的控制论学者,都对CLF及其应用进行了广泛的研究;近年来,他们的学生以及众多的控制理论工作者又对此倾注了大量的心血。取得了一批成果,并被应用到不同类型的非线性控制系统,诸如神经网络系统、开关控制系统、随机控制系统等方面的研究中去.
二、 CLF 的定义及其主要结论
1.相关概念
首先我们给出以后定理介绍中所需的相关概念的定义
定义2.1 给定连续函数V :x +→R 称v 是
(i )正定的(positive Definite ),如果V(0)=0且当x 0≠时,V(x)>0;
(ii)真的(proper ),如果当||x||∞→。
定义2.2 称函数γ:R ++→R 为k 类函数,若r(0)=0, 且连续、单调递增。进而,
若它满足∞=∞
→)(lim s r s ,则称之为k ∞类函数。 定义2.3 称函数β:+++→?R R R 称为kl 类函数,若对每个固定的t ,函数?(β,t)
是k 类的;而对每个固定的s ,函数),(?s β是严格递减的,并且0),(lim =∞→t s t β。
2.CLF 的定义
考虑如下非线性系统:
),(.
u x f x = (1)
的全局渐近稳定问题,其中状态变量x n R X ?∈输入变量u m R U ?∈. 定义2.4 称函数V (x )为系统(1.1)的控制Lyapunov 函数(CLF),如果满足如下条件
1)V(x)为iE 定的、真的、光滑的。
2)在每个非零x 处,都存
0),(inf
???????u x f x v μ 特别地,对于仿射系统
u x g x f x )()(+=?
(2)
其中x n R X ?∈输入变量u m R U ?∈,)(),(x g x f 为光滑向量,且0)(=x f ,如果系统存在CLF ,则下式成立:
0)(0)(
其中,v l f 表示v (x )沿f 的导数即)(x f x
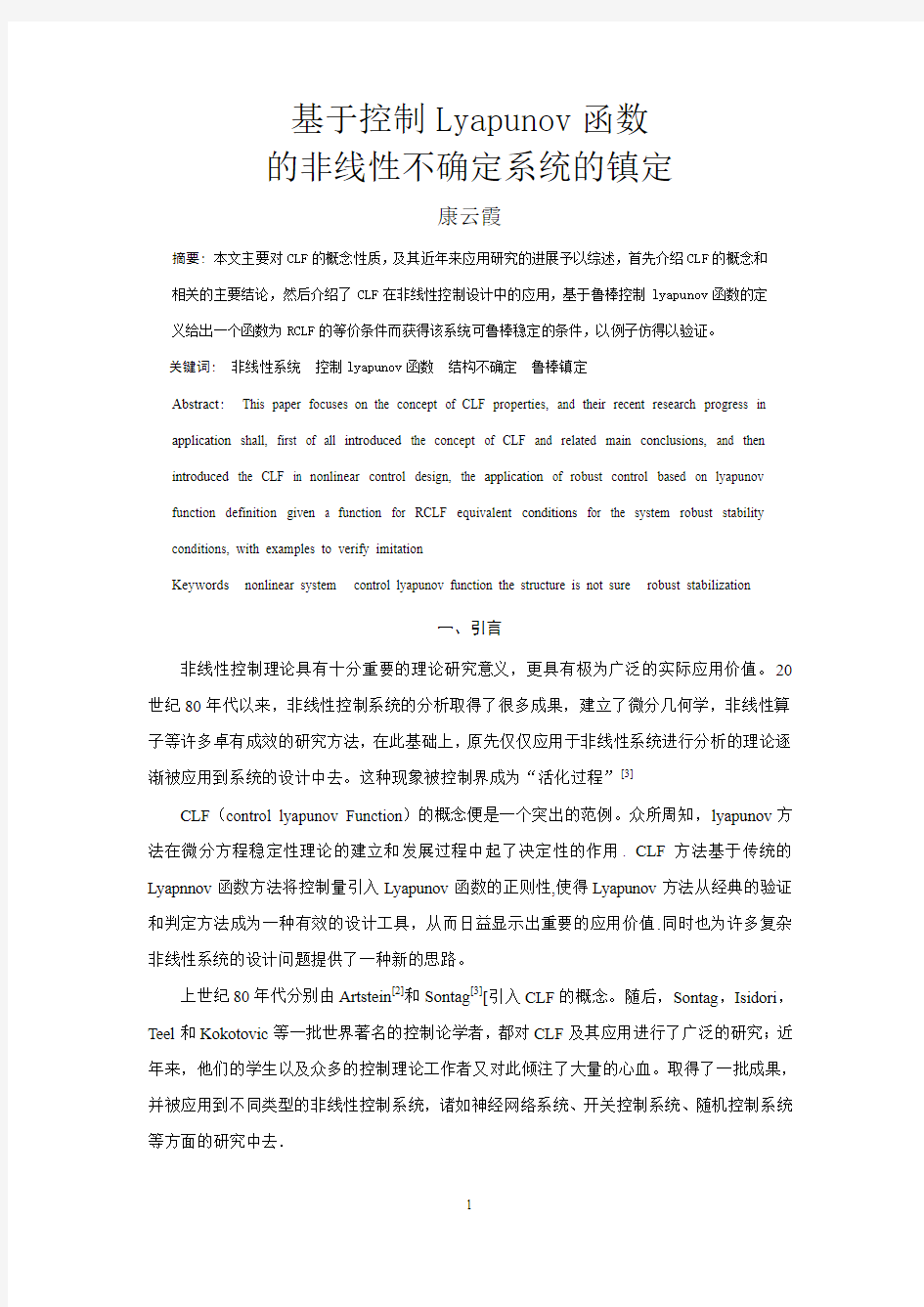
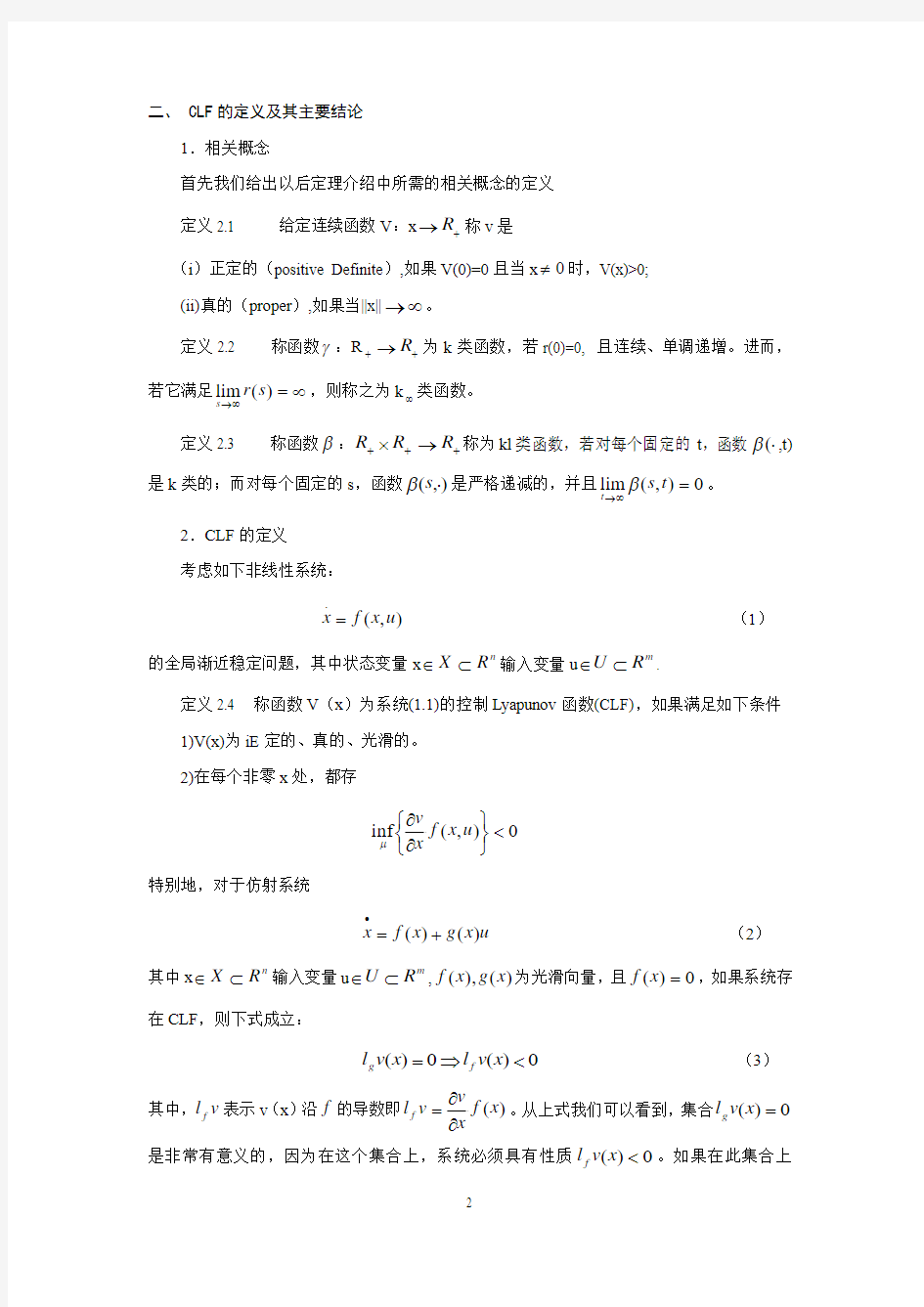
v v l f ??=。从上式我们可以看到,集合0)(=x v l g 是非常有意义的,因为在这个集合上,系统必须具有性质0)( 0)( 定理2.5(Artstein-Sontag 定理) 系统)存在{}0\n R 上光滑且在x=0处连续的反馈律u=k(x), 使得系统在平衡点全局渐近稳定,当且仅当存在正定的、真的、光滑函数v(x),满足下列性 质: (i )对于所有x ≠0,0)(0)( (ii )(小控制性,SmallControlProperty)任给ε>0,存在δ>0,若x ≠0满足||x||<δ,则必 有某个u ,其范数||u||<ε,使得0)()(<+u x v l x v l g f 成立。 CLF 的重要性在于:v(x)的存在性同时也是使(2)渐近稳定的控制律u=k(x)存在的充分条件。 从这一点我们也可以看出CLF 与传统的Lyapunov 函数的不同之处:对于一个系统,如果存 在一个Lyapunov 函数,则系统是稳定的,如果存在一个CLF ,则系统是可以通过反馈实现 稳定的。 进一步,我们将在下面看到,对于仿射系统(2),只要给定系统的CLFV(x),就一定能 够通过系统本身的f(x),g(x)及v(x)构造出除原点外处处光滑的控制律。 3.基于CLF 的控制律 CLF 的理论最早起源于1983年Artsteint[2]的文章,提出了全局稳定反馈的存在与系统 存在CLF 的充要条件,其证明是基于单位的分划,是非构造性的。Sontag[5]于1989年针对 此问题给出了一个通用公式,并根据Lyapunov 的Lie 导数做出了构造性的证明。 定理2.6 (Sontag 公式)[5]如果对于系统(1.3),存在v(x)是CLF ,则可以得到在{}0\n R 上光滑的反馈律: )()()())()(()()((0)(22x b x b x b x b x b x a x a x k u T T ?? ???++-== 0)(0)(≠=x b x b (3) 使系统全局渐近稳定,其中a(x):=)(:)(),(x v l x b x v l g f =.如果v(x)进一步满足小控制性 质,则u 在原点也连续。 另外一个基于CLF 的控制律的构造是由Freeman[6]等提出的逐点最小范数控制 (Pointwise Minimum Norm Contr01)方法。 定理2.7 (Freeman 公式):如果系统存在v(x)是CLF ,以及存在光滑正定的函数a(x), 满足如下条件: )()(0)(x a x v l x v l f g - 则可以得到在{}0\n R 上光滑的反馈律: )() ()()()(0)(x b x b x b x x a x k u T ??????+-== 0)()(0)()(>?+≤?+x x a x x a (5) 可以看到,当选取)()()()(2x b x b x a x T +=?时,Freeman 公式便成为sontag 公式。 对于控制律具有约束的控制问题,类似的公式也已纷纷建立。文[7]给出了有界控制 (Control Bounded in Magnitude)t 抟控制律的构造。[6]分别对正控制(PositiveContr01)、区间 的控制进行了研究。[9]讨论了限于Minkowskii 球的控制(controls Restricted to Minkowskii Balls)In]题针对一类普遍存在的输入限制构造出了含有一个待定参数的控制律的通用公式。 三、CLF 在非线性系统设计中的应用 十多年来,关于CLF 的研究受到了普遍的重视,大量的研究结果充分揭示出CLF 在非 线性系统设计中极为广阔的应用前景.纵观其研究过程,我们发现其核心思想是:根据所研 究问题本身的特点及其性质要求,寻求控制Lyapunov 函数应具有的某种正刚性条件,以刻 画出非线性系统设计中各类性质的Lyapunov 特征.正因如此,才衍生出下面将提到的输入 状态稳定CLF(ISS .CLF),积分输入状态稳定CLF(IISS —CLF),鲁棒CLF(RCLF),干扰抑 制CLF(DACLF)以及自适应CLF(ACLF)等等.对控制系统而言,稳定性无疑是最重要的性 质,而镇定问题则与稳定性密切相关.与经典Lyaplulov 理论类似,CLF 在非线性控制系统 分析和设计中的应用也是从其镇定的作用的研究开始的. 1.稳定性概念的拓广 以Sontag 为代表的一批学者对CLF 及其应用进行了深入而系统的研究,其工作是与对 稳定性概念的推广和“活化”紧密联系在一起的。作为微分方程理论中的全局渐近稳定性 (Globally Asymptotic Stability ,简记为GAS)的自然推广,Sontag 提出了输入状态 定性(Input-to —State Stability ,简记为ISS)。 定义3.1系统(1.1)称为是ISS ,若存在β∈KL 和,∞∈k γ,使得对Vt ≥0, Vxo ∈R n ”和e l u ,∞∈?,恒有 |x(t,,0x u)|||)(||)|,(|0t u t x γβ+≤ (6) 其中e l ,∞表示本性有界的可测函数u :R m R →+构成的集合,t u 是在t 时刻的截断函数. 2.非线性控制系统的镇定 Sontag 为CLF 的应用,尤其是在非线性系统镇定研究中的应用提供了一种系统化的方法,因而具有非常重要的意义.一般来说,当))(,(x u x V ? 为负定的,sontag 给出了一种“通用公式”,根据CLF 的导数和系统的有关信息,直接导出必要的控制律.具体地讲,假若系统具有(2)的形式,且m R u =,那么使得相应的闭环系统全局渐近稳定的反馈控制律可由))(),(()(x b x a K x b u T =给出,其中)()(x v l x a f =函数K :R R R m →?定义为 ?? ???++-=0||||||||),(242b b a a b a K 00=≠b b (7) 若f ,g 是光滑的,则上述控制律在}0{\n R 上是光滑的.此外,若V 满足小控制性,即满足Artstein —Sontag 定理中的条件(ii),则该控制律在0点处是连续的。 三、具有结构不确定的非线性系统的鲁棒镇定 Freeman 将CLF 推广到具有干扰的系统,提出鲁棒控制lyapunov 函数(RCLF )的概念,并用之于非线性系统的设计,获得了若系统存在RCLF 等价于它可鲁棒镇定的结论。 考虑具有结构不确定的多输入非线性系统 2 212211332 313211222 1112213211)()(2)()(2)()(1u x u x x x x x x u x u x x x x x x u e x u x x x x x x x x -++--=+-++-=++-+=???σσσσσσ (8) 其中,232221)()(x x x x +≤??? ? ??σσ 取V (x )=)(5.0232221x x x ++ 3322)(x x x N += 由于??????????--=322122)(x x x x f ????????? ?-=2233 111)(x x x x e x x x g x ???? ??????--=11)(1123x x x x x e 则 31 2322)(2)(x x x x v l f ++-= ),()(32x x x v l e =, (9) 且 B (x )=0, )()(20,00232223221x x x x x x x +-<+-?≠=?≠ 即B (x )=0, )()()(0x N x c x v l x f - 所以V (x )为系统的RCLF. 选取设计参数412322)(5.0)(x x x x ++=α,那么当B (x )=0.0≠x ,则 )()()()(x x N x v l x v l e f α-<+ (10) 由于 )(5.0)(232231411x x x x x +-+=α, )()(2x B x =α 则控制规律为 ??? ????++-+-=0)1()1))((5.0(221232231413x T x e x e x x x x u 2/)(2/)(2322314123223141x x x x x x x x +≥++>+ (11) 图1,图2显示初值为x(0)=()T 51016,且取121sin )(x x x =σ 232cos )(x x x =σ时,4.15,4.16所构成闭环系统的轨线x(t),及控制规律u (t ),仿真验证定理4.2的结果,对 ,)0(3 R x ∈? )(1x σ?,)(2x σ 满足232221)()(x x x x +≤???? ??σσ具有相似的仿真结果。 图1闭环系统的状态轨线x(t) 图2:闭环系统的控制率u(t) 结构不确定的非线性系统鲁棒镇定问题,基于RCLF,给出一个函数为RCLF函数的等价条件,进而获得该类系统可鲁棒稳定,可鲁棒实用稳定、可鲁棒渐近稳定的充分条件,并构造了与之相应的逐点最小范数的连续状态反馈控制律.仿真实例说明了所采用方法的有效性. 四、小结 本文首先介绍了非线性系统控制lyapunov函数的概念,性质及在非线性系统中的应用, 充分揭示了这一工具所蕴含的研究价值然后利用系统的鲁棒CLF,研究了一类含有未知参数及扰动的不确定系统的自适应稳定与自适应跟踪问题利用鲁棒CLF设计方法及参数映射技术,针对这两种情况,分别建立了使系统自适应稳定的充分条件,并设计出使系统自适应稳定的反馈控制律。 参考文献 [1]黄琳.稳定性与鲁棒性的理论撰础.北京:科学出版社,2003 [2]蔡秀珊.控制Lyapunov函数的构造与非线性不确定系统的镇定.上海交通大学博士论 [3]Hahn W Stability of motion.Berlin:Springer,1967 H.K.Khalil著.朱义胜,董辉,李作洲等译.非线 性系统,第三版.北京:电子工业出版社。2005 [4]Kokotovie P and Arrack M,Constructive nuclear con oh a historical perspective.Automatic,2001,37(5):637—662 [5]Hale J.Theory functional differential equations.New York ,USA:Springer-Verlag,1997 [6]ArtsteinZ Stabilization With relaxed Controls.Nonlinear Analysis,Theory ,Methods and Applications,1983, 7(11):1163·1173 [7] Malkinl G The theory of stability of motion.Moscow:Gostekhizdat,1952 [8] Krasovski NN.Some problems of the stability theory.Moscow:Fizmatgiz,1959 [9]Lasalle J and Lefschetz S.Stability by Lyapunov’s direct method with applications.New York:Academic Press.1961 [10] Lefschetz S.Stability of nonlinear control systerns.New York:Academic Press,1965 [11]KriehmanM,SontagE D SndWang YLyapunov CharacterizationOfrobust stabilization. NonlinearAnalysis, Theory,Methods andApplications,1999,37(7):813—840 [12]Y. Lin, E. D. Sontag, Y. Wang, A smooth converse Lyapunov theorem for robust stability, SIAM Journal on Control and Optimization, 1996, vol.34(1):124-160. 9 控制系统的非线性问题 9.1概述 在物理世界中,理想的线性系统并不存在。严格来讲,所有的控制系统都是非线性系统。例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。实际上,所有的物理元件都具有非线性特性。如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。 图9-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。 图9-1 伺服电动机特性 9.1.1控制系统中的典型非线性特性的类型 常见典型非线性特性有饱和非线性、间隙非线性、死区非线性、继电非线性等。 9.1.1.1饱和非线性 控制系统中的放大环节及执行机构受到电源电压和功率的限制,都具有饱和特性。如图9-2所示,其中a x a <<-的区域是线性范围,线性范围以外的区域是饱和区。许多元件的运动范围由于受到能源、功率等条件的限制,也都有饱和非线性特性。有时,工程上还人为引入饱和非线性特性以限制过载。 图9-2 饱和非线性 9.1.1.2不灵敏区(死区)非线性 控制系统中的测量元件、执行元件等一般都具有死区特性。例如一些测量元件对微弱的输入量不敏感,电动机只有在输入信号增大到一定程度的时候才会转动等等。如图9-3所示,其特性是输入信号在?< 第九章 非线性控制系统 一、填空选择题(每题2分) 1.非线性系统的稳定性与下列( )因素有关。 A . 系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 2.非线性系统自持振荡是与-------有关。 A .系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 3.非线性系统自持振荡中的振幅和频率是由-------决定的, 4.相平面法适用于-------阶非线性系统,描述函数法适用于-------阶非线性系统。 5.系统中有二个非线性元件串联,其描述函数分别为N 1、N 2,则合成的描述函数必是( ) A .N 1/N 2 B .N 1*N 2 C .N 1+N 2 D .需重新分析计算 6.系统的-1/N 和G (jw )如图,在A 和B 处产生了自持振荡,分析其稳定性,A 点是-----的,B 点是------的 7.非线性系统的相轨迹在相平面的上半部,其走向是从----向----方向运动,而在相平面的下半部则从---向----运动。 8.相轨迹的对称性是指其曲线可能对称于----,-----,或-----;正交性是指与-----轴正交。 9.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点位置是-------。 10.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点性质是-------。 11.极限环把相平面分为内外二部分,相轨迹----(填能或不能)从环内穿越极限环进入环外,--------(填能或不能)从环外穿越极限环进入环内。 12.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点性质是( )。 A 、稳定节点 B 、稳定焦点 C 、鞍点 D 、中心点 1. D 2. A 3. 系统本身的特性 4. 一、二,任意 5. D 6. 不稳定,稳定 7. 左,右,右,左 参考答案 一、填空题 1. 非本质;本质 2. 自持振荡 3. 初始条件;输入信号大小 4. 饱和非线性;死区非线性;间隙非线性;继电器非线性 5. 不稳定 6. 稳定;不稳定;半稳定 7. 自左向右;自右向左 二、分析与计算题 1. 求3()()y t ax t =的描述函数。 解:由于3()()y t ax t =是单值奇函数,所以其傅里叶级数展开式中A 0=0、A 1=0、φ1=0,将()sin x t A t ω=代入B 1的计算公式,可得 2102330340 3203203 03031()sin 1sin sin 2sin 21cos 2()2 212cos 2cos 24 1cos 412cos 22242311(cos 2cos 4)828 231 (sin 284 B y t td t aA t td t aA td t aA t d t aA t t d t t t aA d t aA t t d t aA π π π ππππωωπωωωπωωπωωπωωωπωωωπωωωπππ===-=-+=+-+==-+=-???????3 1sin 4) 003234 t t aA ππωω+= 所以 32 133()44 B aA N A aA A A === 2.设具有滞环继电器非线性特性的非线性系统结构如题图8.1所示,已知b =1,a =0.3,试判断系统是否存在自持振荡,若存在,则求出自持振荡的幅值和频率。 题图8.1 解:具有滞环的继电器非线性特性的描述函数为 2 4()j ()ab N A A a A π=≥ 其描述函数负倒数特性为 1j ()()4a A a N A b π-=≥ 可见,描述函数负倒数特性的虚部为常数4a b π-,即1()N A -曲线为一条虚部为4a b π-的直线。 由于10 ()(21)(0.41) G s s s =++,所以 自动控制考试九非线性 ————————————————————————————————作者:————————————————————————————————日期: 第九章 非线性控制系统 一、填空选择题(每题2分) 1.非线性系统的稳定性与下列( D )因素有关。 A . 系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 2.非线性系统自持振荡是与-------有关。 A .系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 3.非线性系统自持振荡中的振幅和频率是由-- 系统本身的特性-----决定的, 4.相平面法适用于---一、二----阶非线性系统,描述函数法适用于—任意-----阶非线性系统。 5.系统中有二个非线性元件串联,其描述函数分别为N 1、N 2,则合成的描述函数必是( D ) A .N 1/N 2 B .N 1*N 2 C .N 1+N 2 D .需重新分析计算 6.系统的-1/N 和G (jw )如图,在A 和B 处产生了自持振荡,分析其稳定性,A 点是---不稳定--的,B 点是---稳定---的 7.非线性系统的相轨迹在相平面的上半部,其走向是从—左--向—右--方向运动,而在相平面的下半部则从—右-向-左---运动。 8.相轨迹的对称性是指其曲线可能对称于----,-----,或-坐标原点----;正交性是指与-x----轴正交。 9.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点位置是-------。 10.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点性质是-------。 11.极限环把相平面分为内外二部分,相轨迹---不能-(填能或不能)从环内穿越极限环进入环外,---不能-----(填能或不能)从环外穿越极限环进入环内。 12.已知非线性系统的微分方程是:023. ..=++x x x , 则奇点性质是( A )。 A 、稳定节点 B 、稳定焦点 C 、鞍点 D 、中心点 1. D 2. A 3. 系统本身的特性 第九章非线性控制系统简介 1 主要内容简介 Description Function(描述函数)Lyapunov(李亚普诺夫)稳定性分析 2 简介简介回顾非线性系统特点 研究非线性系统的意义与方法典型非线性特性的数学描述 3 简介 1. 回顾 到目前为止前面的分析与设计都是基于线性系统的. 许多实际系统在某个操作点附近都可以近似为线性系统. 但是 非线性特性问题仍然不容忽视,本章就非线性控制进行简要介绍. 4 简介 x1 t y1 t x 2 t y 2 t 2. 非线性系统特点 a1 x1 t a 2 x 2 t a1 y1 t a 2 y 2 t 非线性系统与线性控制系统相比,具有一系列新的特点 1 线性系统满足叠加原理,而非线性控制系统不满足叠加原理(指同时满足叠加性与均匀性 虽然非线性系统通过利用非线性滤波,可使系统满足叠加性(如图示),但不可能满足均匀性。滤波器 I 非线性器件 I X1X2 Y1+Y2 滤波器 II 非线性器件 II 带滤波器的非线性系统 5 简介 2. 非线性系统特点非线性系统与线性系统相比,具有一系列新的特点:2 非线性系统的稳定性不仅取决于系统的固有结构和参数,而且与系统的初始条件以及外加输入有关系 对非线性系统而言,稳定性总是针对某一平衡点(状态)讨论的。 所谓平衡点(状态): xt f x t 设 f x t 0 求出满足的所有xe 即为非线性系统的平衡点 6 简介 2. 非线性系统特点例:对于一由非线性微分方程 x x 1 x 描述的非线性系统,显然有两个平衡点,即x10 和 x21。将上式改写为 dx 设t=0时,系统的初态为x0。积分上式可得 dt x 1 x x0 e t xt 1 x 0 x 0 e t xt 若初始条件x0<1,随着时间 1 t t xt0,即平衡状态x10 x0 ln 是小范围稳定的 当x0>1时, x0 1 0 在tlnx0/x0-1时, xt 这说明x21是不稳定的平衡状态。 一阶非线性系统 7 简介自激振荡(自振):没有外界周期变化信号 的作用时,系统内产生的具有固定振幅和频 2. 非线性系统特点 率的稳定周期运动。非线性系统与线性系统相比,具有一系列新的特点: 3 非线性系统可能存在自激振荡现象(即维持等幅振荡运动) 对于二阶非线性系统,这种自激振荡状态称为极限环。 4 非线性系统在正弦信号作用下,其输出存在极其复杂的情况: 跳跃谐振和多值响应 A 2 2 3 1 . 4 4 .5 跳跃谐振与多值响应 8 简介 2. 非线性系统特点分频振荡和倍频振荡 非线性系统在正弦信号作用下,其稳态分量除产生同频率振 荡外,还可能产生倍频振荡和分频振荡。如图所示波形。输入信号 t倍频信号 t分频信号 t 倍频振荡与分频振荡 9 简介 3. 研究非线性系统的意义与方法研究非线性系统的意义1)实际的控制系统,存在着大量的非线性因素。这些非线性因素的 存在,使得我们用线性系统理论进行分析时所得出的结论,与实际 系统的控制效果不一致。线性系统理论无法解释非线性因素所产生 的影响。2)非线性特性的存在,并非总是对系统产生不良影响。 10 简介 3. 研究非线性系统的意义与方法研究非线性系统的方法 1)相平面法是用图解的方法分析一阶,二阶非线性系统的方法。通过绘制控制系统相轨迹,达到分析非线性系统特性的方法。 2)描述函数法是受线性系统频率分析法启发,而发展出的一种分析非线性系统的方法。它是一种谐波线性化的分析方法,是频率法在非线性系统分析中的推广。3)计算机求解法是利用计算机运算能力和高速度求解非线性微分方程的一种数值解法。 11 简介 3. 研究非线性系统的意义与方法常见的非线性特性:继电特性 第!"卷第#期!$$$年%月自动化学报&’(&&)(*+&(,’&-,.,’&/012!"3.02#44444444444444444444555 5-6783!$$$研究简报非线性不确定系统的鲁棒性研究9:费树岷冯纯伯宋士吉;东南大学自动化研究所南京!9$$%":;<=>?@1@A B C 0A D E 6F 86G F 8C A :关键词非线性系统3不确定性3匹配条件3模有界条件3鲁棒性8 9:国家攀登计划;%H $!99$9H :I 国家自然科学基金;"%%J K $9$3"%"$J $$K : 资助项目8收稿日期9%%L =9!=!#收修改稿日期9%%%=$"=9#M N O N P M Q R S T M S U V O W T N O OX S MT S T Y Z T N P M V T Q N M W P Z T O [O W N \O ]<,-^F >@A ]<._’^F A ‘0-*._-^@a @ ;b c d c e f g hi j d k l k m k c n op m k n q e k l n j 3r n m k h c e d k s j l t c f d l k u 3ve j w l j x ! 9$$%":y z {|}~!".0A 1@A 6?#E $E %6>3F A C 6#%?@A %$3>?%C ^@A &C 0A G @%@0A 3A 0#>=‘0F A G 6G C 0A G @%@0A 3#0‘F E %A 6E E 89引言 非线性不确定系统的鲁棒性研究3早期是以在匹配条件;>?%C ^@A &C 0A G @%@0A :和广义匹配条件下3设计控制器使闭环系统达到实际稳定;7#?C %@C ?1E %?‘@%@%$ :为主’9(J )8近些年利用*+控制理论的结果3出现了对具有有界结构的非线性不确定系统的鲁棒性讨论’K (%)8 模有界结构条件下3非线性不确定系统的鲁棒性有可能达到使状态趋于平衡点3而非仅仅实际稳定8在文献’K ) 中所讨论的非线性系统3要求其非线性部分具有线性界8文献’#)首次将模有界结构条件引入到线性不确定系统的鲁棒性研究中8文献’")进一步讨论了这一结构下的鲁棒*+控制问题8而文献’H ) 则研究了另一种有界结构的不确定非线性系统的鲁棒*+控制问题8 !问题的提出 考虑如下非线性不确定系统 ,-./;,:01/;,:0;2;,:012;,::33/;4:.431/;4:.555555555555555555555555555555555555555555555555555555543 ;9:万方数据 第九章非线性控制系统 一、非线性控制系统的基本概念 实际的控制系统中都存在非线性元件,或者一些部件的特性中含有非线性特性。在一些系统中,还人为的加入非线性元件来改善系统性能。因此严格的讲,几乎所有的控制系统都是非线性的。当非线性程度较小,可以用线性化的方法来处理。这种非线性称为非本质非线性。当控制系统中非线性程度较强时,用线性化方法来研究系统会带来很大的误差,甚至会得到错误的结论。这种非线性称为本质非线性。本质非线性特性有死区特性、继电特性等。死区特性将使系统出现较大的稳态误差。饱和特性会降低系统的超调量,有时会引起稳定振荡。间隙特性可使系统的振荡加剧,静差也会增大。有时也会使系统不稳定。 与线性系统相比,非线性系统有以下几个特点: 1.线性系统可以采用叠加原理,而非线性系统则不能。 2.线性系统的稳定性与初值和系统的输入无关。而非线性系统则有关。 3.线性系统可以写出通解形式,而非线性系统则不能。 4.非线性系统的稳定性和响应形式,除了与系统结构和参数有关外,还和系统的初始 条件有关。非线性系统的平衡点可能不止一个,可能在某个局部范围稳定,在另一 个范围却不稳定。故对非线性系统来说,不能笼统地说系统是否稳定,而只能说明 系统在多大范围内的稳定性。 5.非线性系统的输出响应,除了收敛和发散两种运动状态外,还会产生与输入幅值, 频率和自身结构参数有关的稳定的自振运动。 6.非线性元件的正弦响应会产生非线性畸变,输出响应中除了会有与输入同频率的基 波成分外,还有其它各种谐波分量。 二、描述函数法 描述函数是分析非线性系统的一种近似方法,它是线性系统理论中的频率特性法在非线性系统中的应用。它主要用于对一类非线性系统的稳定性分析及输出响应分析,此方法不受系统的阶数限制。 1.描述函数的基本概念 描述函数是非线性元件在正弦输入作用下的输出响应用一次谐波分量来近似,得到 非线性元件(环节)的等效近似频率特性。用描述函数法分析非线性系统有如下条 件。 1)非线性元件的特性具有奇对称性(一般的死区、饱和、间隙、继电等非线性特性均 有奇对称性)。 2)系统可简化成只有一个非线性环节和一个线性环节串联的典型单位反馈结构。 3)非线性环节输出中的高次谐波幅值小于一次谐波幅值。 4)线性部分的低通滤波性能很好。 2.描述函数N 第九章 非线性控制系统 控制系统有线性和非线性之分。在以上各章,讨论了线性系统各方面的问题。但是严格地说,理想的线性系统在实际中并不存在。在分析非线性系统时,人们首先会想到使用在工作点附近小范围内线性化的方法,当实际系统的非线性程度不严重时,采用线性方法去进行研究具有实际意义。但是,如果实际系统的非线性程度比较严重,则不能采用在工作点附近小范围内线性化的方法去进行研究,否则会产生较大的误差,甚至会导致错误的结论。这时应采用非线性系统的研究方法进行研究。 非线性系统的分析方法大致可分为两类。运用相平面法或数字计算机仿真可以求得非线性系统的精确解,进而分析非线性系统的性能,但是相平面法只适用于一阶、二阶系统;建立在描述函数基础上的谐波平衡法可以对非线性系统作出定性分析,是分析非线性系统的简便而实用的方法,尤其在解决工程实际问题上,不须求得精确解时更为有效。 9-1 引言 实际系统中的非线性因素 实际的物理系统,由于其组成元件总是或多或少地带有非线性特性,可以说都是非线性系统。例如,在一些常见的测量装置中,当输入信号在零值附近的某一小范围之内时,没有输出,只有当输入信号大于此范围时,才有输出,即输入输出特性中总有一个不灵敏区(也称死区),如图9-1(a)所示;放大元件的输入信号在一定范围内时,输入输出呈线性关系,当输入信号超过一定范围时,放大元件就会出现饱和现象,如图9-1(b)所示;各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,其输入输出特性为间隙特性,如图9-1(c)所示;有时为了改善系统的性能或者简化系统的结构,还常常在系统中引入非线性部件或者更复杂的非线性控制器。通常,在自动控制系统中,最简单和最普遍的就是继电特性,如图9-1(d)所示。 以上情况说明,非线性特性在实际中是普遍存在的,只要系统中包含一个或一个以上具有非线性特性的元件,就称其为非线性系统。所以,严格地说,实际的的控制系统都是非线性系统。所谓线性系统仅仅是实际系统忽略了非线性因素后的理想模型。当实际系统的非线性程度不严重时,在某一范围内或某些条件下可以近似地视为线性系统,这时采用线性方法去进行研究具有实际意义,分析的结果符合实际系统的情况。但是,如果实际系统的非线性程度比较严重,则不能 (a) (b) (c) (d) 图9-1 一些典型的非线性特性 第九章非线性控制系统 一、填空选择题(每题2分) 1.非线性系统的稳定性与下列(D )因素有关。 A.系统结构和参数B.初始条件C.输入信号大小D.A、B、C、 2.非线性系统自持振荡是与-------有关。 A.系统结构和参数B.初始条件C.输入信号大小D.A、B、C、 3.非线性系统自持振荡中的振幅和频率是由-- 系统本身的特性-----决定的, 4.相平面法适用于---一、二----阶非线性系统,描述函数法适用于—任意-----阶非线性系统。 5.系统中有二个非线性元件串联,其描述函数分别为N1、N2,则合成的描述函数必是(D)A.N1/N2B.N1*N2C.N1+N2 D.需重新分析计算 6.系统的-1/N和G(jw)如图,在A和B处产生了自持振荡,分析其稳定性,A点是---不稳定--的,B点是---稳定---的 7.非线性系统的相轨迹在相平面的上半部,其走向是从—左--向—右--方向运动,而在相平面的下半部则从—右-向-左---运动。 8.相轨迹的对称性是指其曲线可能对称于----,-----,或-坐标原点----;正交性是指与-x----轴正交。 9.已知非线性系统的微分方程是:023...=++x x x ,则奇点位置是-------。 10.已知非线性系统的微分方程是:023...=++x x x ,则奇点性质是-------。 11.极限环把相平面分为内外二部分,相轨迹---不能-(填能或不能)从环内穿越极限环进入环外,---不能-----(填能或不能)从环外穿越极限环进入环内。 12.已知非线性系统的微分方程是:023. ..=++x x x , 则奇点性质是( A )。 A 、稳定节点 B 、稳定焦点 C 、鞍点 D 、中心点 1. D 2. A 3. 系统本身的特性 4. 一、二,任意 5. D 6. 不稳定,稳定 7. 左,右,右,左 8. X ,. x , 坐标原点,x 9. 坐标原点 10.稳定节点 11.不能 12.A 二、综合计算题 第八章 非线性控制系统分析习题与解答 7-1 三个非线性系统的非线性环节一样,线性部分分别为 (1) G s s s ()(.)= +1011 (2) G s s s ()()=+2 1 (3) G s s s s s ()(.) ()(.) =+++21511011 试问用描述函数法分析时,哪个系统分析的准确度高? 解 线性部分低通滤波特性越好,描述函数法分析结果的准确程度越高。分别作出三个系统线性部分的对数幅频特性曲线如图所示。 由对数幅频特性曲线可见,L 2的高频段衰减较快,低通滤波特性较好,所以系统(2)的描述函数法分析结果的准确程度较高。 7-2 将图示非线性系统简化成环节串联的典型结构图形式,并写出线性部分的传递函数。 解 (a) 将系统结构图等效变换为图(a)的形式。 G s G s H s ()()[()]=+111 (b) 将系统结构图等效变换为图(b)的形式。 G s H s G s G s ()() () () =+1111 7-3 判断题7-41图中各系统是否稳定;)(1A N -与)(ωj G 两曲线交点是否为自振点。 解 (a ) 不是 (b) 是 (c) 是 (d) c a 、点是,b 点不是 (e) 是 (f) a 点不是,b 点是 (g) a 点不是,b 点是 (h) 系统不稳定 (i) 系统不稳定 (j) 系统稳定 7-4 已知非线性系统的结构如图所示 图中非线性环节的描述函数为N A A A A ()()=++>6 2 试用描述函数法确定: (1)使该非线性系统稳定、不稳定以及产生周期运动时,线性部分的K值范围; (2)判断周期运动的稳定性,并计算稳定周期运动的振幅和频率。 解 (1) -=-++126N A A A ()(), -=--∞=-101 3 1 1N N (),() dN A dA A ()()=-+<4 202 N(A)单调降,)(1A N -也为单调降函数。画出负倒描述函数曲线)(1A N -和 G j ()ω曲线如图所示,可看出,当K 从小到大变化时, 系统会由稳定变为自振,最终不稳定。 求使 Im[G j ()]ω=0 的ω值: 令 ∠=-?-=-?G j arctg ()ωω902180 得 arctg ωω=?=451, 8 非线性控制系统 前面几章讨论的均为线性系统的分析和设计方法,然而,对于非线性程度比较严重的系统,不满足小偏差线性化的条件,则只有用非线性系统理论进行分析。本章主要讨论本质非线性系统,研究其基本特性和一般分析方法。 8.1非线性控制系统概述 在物理世界中,理想的线性系统并不存在。严格来讲,所有的控制系统都是非线性系统。例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。实际上,所有的物理元件都具有非线性特性。如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。 图8-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。 图8-1 伺服电动机特性 8.1.1控制系统中的典型非线性特性 组成实际控制系统的环节总是在一定程度上带有非线性。例如,作为放大元件的晶体管放大器,由于它们的组成元件(如晶体管、铁心等)都有一个线性工作范围,超出这个范围,放大器就会出现饱和现象;执行元件例如电动机,总是存在摩擦力矩和负载力矩,因此只有当输入电压达到一定数值时,电动机才会转动,即存在不灵敏区,同时,当输入电压超过一定数值时,由于磁性材料的非线性,电动机的输出转矩会出现饱和;各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,等等。 实际控制系统总是或多或少地存在着非线性因素,所谓线性系统只是在忽略了非线性因素或在一定条件下进行了线性化处理后的理想模型。常见典型非线性特性有饱和非线性、死区非线性、继电非线性、间隙非线性等。 8.1.1.1饱和非线性 控制系统中的放大环节及执行机构受到电源电压和功率的限制,都具有饱和特性。如图8-2所示,其中a x a <<-的区域是线性范围,线性范围以外的区域是饱和区。许多元件的运动范围由于受到能源、功率等条件的限制,也都有饱和非线性特性。有时,工程上还人为引入饱和非线性特 网络化系统集成优化控制的实现 复杂系统的优化控制问题是近年来研究工作的热点之一,传统的动态大系统递阶控制都是在精确模型的前提下获得的,然而许多实际系统的数学模型仅仅是实际的某种近似,精确模型难以获得,从而难以获得实际系统的最优控制。RobertS针对实际和模型存在差异的情况下,首先提出了动态系统优化与参数估计集成(简称DISOPE)方法,该方法通过迭代求解基于模型最优控制向题和参数估计问题,获得实际问题的真实最优解。将非线性动态大系统递阶控制方法与动态系统优化与参数估计集成方法相结合可形成非线性动态大系统DISOPE算法。 Becerra和Robelts针对连续非线性动态大系统给出了一种递阶DISOPE算法,提出了非线性离散动态大系统的两种递阶优化方法,求解实际非线性离散动态大系统的最优控制。实际中的大系统或复杂系统往往具有分布的区域性和网络化性等特征,同时,随着计算机网络技术和自动控制技术的发展,网络环境下自动化技术得到了飞速的发展,为网络化系统的集成优化控制问题的研究创造了条件。 1、网络化系统及其集成优化控制问题 (1)网络化系统及其特征 复杂系统往往具有分布的区域性和网络性等特征。网络化系统是指网络化的复杂系统,即网络环境下的复杂系统,其特征是通过计算机络将各子系统相连构成一个网络化的复杂大系统,网络环境可以是局域网或是btemet网络。随着计算机网络及其技术的发展,网络通讯技术得到了极大的提高,网络的规模也得到了大大地提升,使得原来分散较难实现的数据输出和交换,可以在一个“贯通”的网络环境中实现,其信息的传输均依赖网络进行。本文研究的网络化系统的集成优化控制是指对网络环境下复杂系统的集成优化控制。 (2)网络化系统的集成优化控制问题 实际系统中的优化问题无处不在,同时由于计算机网络及其技术的发展,使得分散的、具有区域特征的复杂系统形成了具有鲜明特征的网络化系统,对网络化系统的集成优化控制问题进行研究具有重要的理论意义和实际应用价值。本文就是将集成优化控制方法与网络自动化技术相结合,对网络化系统的集成优化控制方法进行了研究。 第八章 非线性控制系统 一.基本要求: 1.了解非线性控制系统与线性控制系统最重要的区别; 2.掌握自动控制系统中常见的典型非线性特性; 3.了解分析非线性控制系统的常用两种方法—描述函数法和相平面法。 4.掌握分析非线性控制系统的方法—描述函数法; 5.熟练掌握应用描述函数分析法分析系统的稳定性; 6.掌握应用描述函数分析法,分析系统自振荡产生的条件及振幅和频率的确定。 二.本章要点: 1.常见的典型非线性特性:饱和特性、死区特性、回环特性、继电器特性、变放大系数特性等。 2.非线性系统的特性:非线性控制系统与线性控制系统相比,有如下特点: (1)非线性控制系统的稳定性,不仅取决于系统的结构和参数,而且与输入信号的幅值和初始条件有关。 (2)在非线性控制系统中,如果输入是正弦信号,输出就不一定是正弦信号,而是一个畸变的波形,它可以分解为正弦波和无穷多谐波的叠加。 (3)叠加原理不适用于非线性控制系统。 (4)非线性控制系统常常产生自振荡。在非线性控制系统中,即使没有外加的输入信号,系统自身产生一个有一定频率和幅值的稳定振荡,称为自振荡(自持振荡)。自振荡是非线性控制系统的特有运动模式,它的振幅和频率由系统本身的特性所决定。 3.非线性控制系统的分析研究方法: 目前分析非线性控制系统的常用方法之一描述函数法,是一种基于频率域的分析方 法。这种方法主要用于研究非线性系统的稳定性和自振荡问题。如系统产生自振荡,如何求 )(X N ) ( j G r c - 出其振荡的频率和幅值,以及寻求消除自振荡的方法等。 非线性控制系统经过变换和归化可表示为图8-1所示的典型结构。其中函数)(X N 称为该非线性元件的描述函数,)(ωj G 为系统的线性环节。 此描述函数)(X N 是正弦输入信号幅值X 的函数,这时线性系统中的频率法就可用来研 8-1非线性控制系统典型结构图 究非线性系统的基本特性,而)(1X N -称为描述函数的负倒特性。 4.用描述函数法分析非线性控制系统稳定性: 仿效线性系统用奈氏判据来判定非线性系统的稳定性,不再是参考点)0,1(j -,而是一条)(1X N -的轨迹线。因此,对非线性系统进行稳定分析时,首先要在复平面上分别绘制出以频率ω为变量的)(ωj G 幅相特性曲线和以幅值X 为变量的)(1X N -曲线,然后根据它们的相对位置来判定该系统的稳定性。 (1)如果)(1X N -的轨迹没有被)(ωj G 曲线所包围,则非线性系统是稳定的。而且两曲线相距愈远,系统愈稳定。 (2)如果)(1X N -的轨迹被)(ωj G 曲线所包围,则相应的非线性系统是不稳定的。 (3)如果)(1X N -的轨迹与)(ωj G 曲线相交,则系统的输出有可能产生自持振荡。 为简便判断交点处产生的自持振荡是否稳定,我们以)(ωj G 曲线为界把复平面划分为稳定区和不稳定区。若)(1X N -曲丝沿箭头方向由不稳定区经交点进入稳定区,则在该交点处产生的自持振荡是稳定的;若)(1X N -曲线沿箭头方向由稳定区经交点进入不稳定区,该交点产生的自持振荡就是不稳定的。 三.典型例题分析: [例8-1] 非线性系统的)(ωj G 及)(1X N -的轨迹如图8-2所示,试判断该系统是否稳定。 自动控制试题九非线 性 Revised on November 25, 2020 第九章 非线性控制系统 一、填空选择题(每题2分) 1.非线性系统的稳定性与下列( D )因素有关。 A . 系统结构和参数 B .初始条件C .输入信号大小D .A 、B 、C 、 2.非线性系统自持振荡是与-------有关。 A .系统结构和参数 B .初始条件 C .输入信号大小 D .A 、B 、C 、 3.非线性系统自持振荡中的振幅和频率是由-- 系统本身的特性-----决定的, 4.相平面法适用于---一、二----阶非线性系统,描述函数法适用于—任意-----阶非线性系统。 5.系统中有二个非线性元件串联,其描述函数分别为N 1、N 2,则合成的描述函数必是( D ) A .N 1/N 2 B .N 1*N 2 C .N 1+N 2 D .需重新分析计算 6.系统的-1/N 和G (jw )如图,在A 和B 处产生了自持振荡,分析其稳定性,A 点是---不稳定--的,B 点是---稳定---的 7.非线性系统的相轨迹在相平面的上半部,其走向是从—左--向—右--方向运动,而在相平面的下半部则从—右-向-左---运动。 8.相轨迹的对称性是指其曲线可能对称于----,-----,或-坐标原点----;正交性是指与-x----轴正交。 9.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点位置是-------。 10.已知非线性系统的微分方程是:023. .. =++x x x ,则奇点性质是-------。 11.极限环把相平面分为内外二部分,相轨迹---不能-(填能或不能)从环内穿越极限环进入环外,---不能-----(填能或不能)从环外穿越极限环进入环内。 12.已知非线性系统的微分方程是:023. ..=++x x x , 则奇点性质是( A )。 A 、稳定节点 B 、稳定焦点 C 、鞍点 D 、中心点 1.D 2.A 3.系统本身的特性 4.一、二,任意 5.D 6.不稳定,稳定 7.左,右,右,左 8.X ,. x , 坐标原点,x 9.坐标原点 10.稳定节点 11.不能 12.A 二、综合计算题 a1.(12分)二阶阻尼系统: ,试用等倾斜线法 绘制系统相轨迹。 解:由 第八章非线性控制系统分析 l、基本内容和要求 (l)非线性系统的基本概念 非线性系统的定义。本质非线性和非本质非线性。典型非线性特性。非线性系统的特点。两种分析非线性系统的方法——描述函数法和相平面法。 (2)谐波线性化与描述函数 描述函数法是在一定条件下用频率特性分析非线性系统的一种近似方法。谐波线性化的概念。描述函数定义和求取方法。描述函数法的适用条件。 (3)典型非线性特性的描述函数 (4)用描述函数分析非线性系统 非线性系统的一般结构。借用奈氏判据的概念建立在奈氏图上判别非线性反馈系统稳定性的方法,非线性稳定的概念,稳定判据。 (5)相平面法的基本概念 非线性系统的数学模型。相平面法的概念和内容。相轨迹的定义。 (6)绘制相轨迹的方法 解析法求取相轨迹;作图法求取相轨迹。 (7)从相轨迹求取系统暂态响应 相轨迹与暂态响应的关系,相轨迹上各点相应的时间求取方法。 (8)非线性系统的相平面分析 以二阶系统为例说明相轨迹与系统性能间的关系,奇点和极限环的定义,它们与系统稳定性及响应的关系。用相平面法分析非线性系统,非线性系统相轨迹的组成。改变非线性特性的参量及线性部分的参量对系统稳定性的影响。 2、重点 (l)非线性系统的特点 (2)用描述函数和相轨迹分析非线性的性能,特别注重于非线性特性或线性部分对系统性能的影响。 8-1非线性控制系统分析 1研究非线性控制理论的意义 实际系统都具有程度不同的非线性特性,绝大多数系统在工作点附近,小范围工作时,都能作线性化处理。应用线性系统控制理论,能够方便地分析和设计线性控制系统。 如果工作范围较大,或在工作点处不能线性化,系统为非线性系统。线性系统控制理论不能很好地分析非线性系统。 因非线性特性千差万别,无统一普遍使用的处理方法。 非线性元件(环节):元件的输入输出不满足(比例+叠加)线性关系,而且在工作范围内不能作线性化处理(本质非线性)。 非线性系统:含有非线性环节的系统。 非线性系统的组成:本章讨论的非线性系统是,在控制回路中能够分为线性部分和非线性部分两部分串联的系统。自动控制原理-第9章 控制系统的非线性问题
九非线性
第8章 非线性系统分析 参考答案汇总
自动控制考试九非线性
自动控制原理第九章 大学课件
非线性不确定系统的鲁棒性研究
第九章 非线性控制系统
非线性系统
自动控制试题九非线性
第八章非线性控制系统分析习题与解答
自动控制原理-第8章 非线性控制系统教案
网络化系统集成优化控制的实现
08第八章 非线性控制系统
自动控制试题九非线性
自动控制原理第八章非线性控制系统分析