浅谈线性时不变系统的判断

龙源期刊网 https://www.360docs.net/doc/0f16293982.html,
浅谈线性时不变系统的判断
作者:张涛
来源:《数码设计》2019年第04期
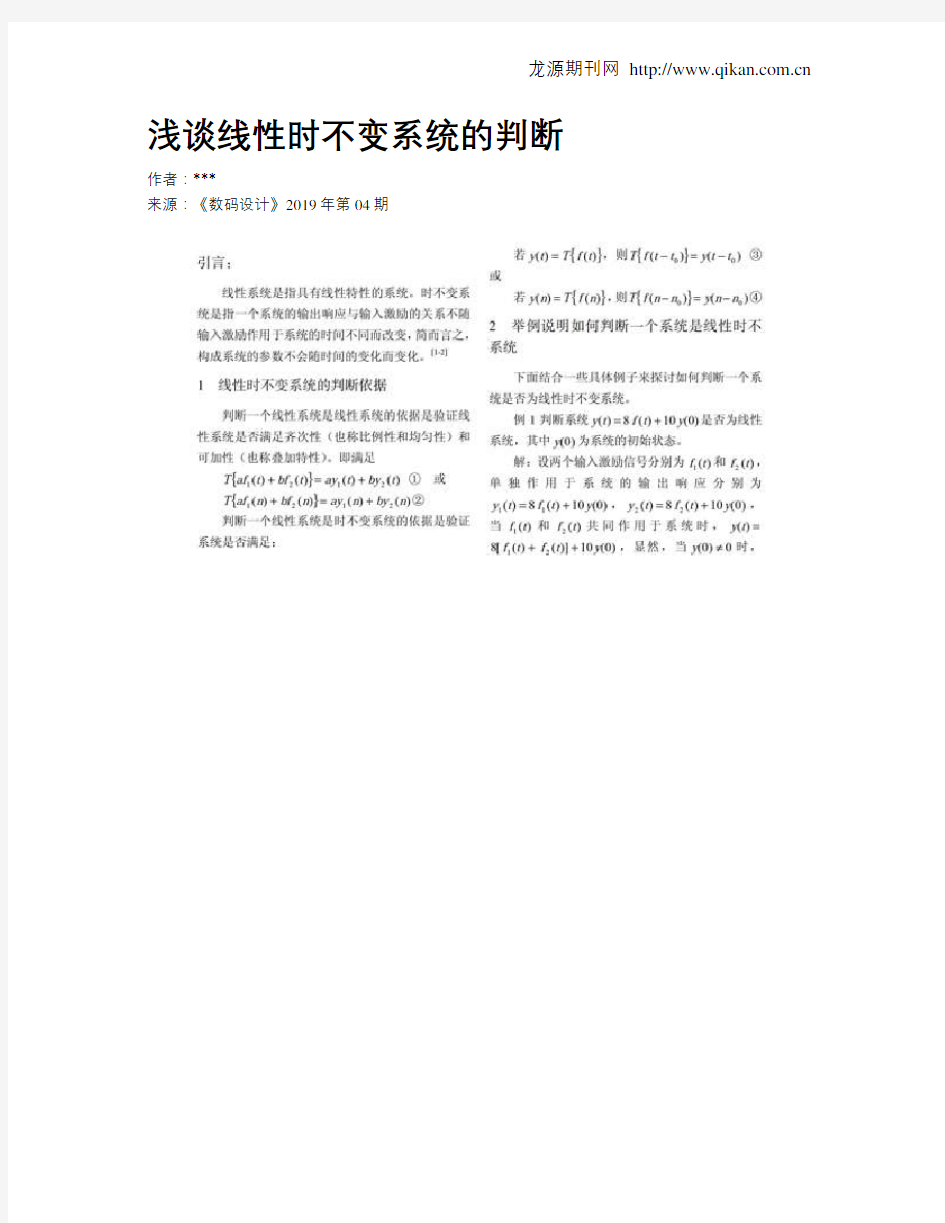
信号与系统第一次作业
《信号与系统》第一次作业 姓名: 学号: 1. 判断下列系统是否为线性系统,其中()y t 、[]y k 为系统的完全响应,(0)x 为系统初始状态,()f t 、[]f k 为系统输入激励。 (1)()(0)lg ()=y t x f t 解:在判断具有初始状态的系统是否线性时,应从三个方面来判断。一是可分解性,即系统的输出响应可分解为零输入响应与零状态响应之和。二是零输入线性,系统的零输入响应必须对所有的初始状态呈现线性特性。三是零状态线性,系统的零状态响应必须对所有的输入信号呈现线性特性。只有这三个条件都符合,该系统才为线性系统。 ()(0)lg ()=y t x f t 不具有可分解性,所以系统是非线性系统。 (2)[](0)[][1]=+-y k x f k f k 解:y[k]具有可分解性,零输入响应x(0)是线性的,但零状态响应f[k]f[k-1]是非线性的,所以系统是非线性系统。 2. 判断下列系统是否为线性非时变系统,为什么?其中()f t 、[]f k 为输入信号, ()y t 、[]y k 为零状态响应。 (1)()()()=y t g t f t 解:在判断系统的时不变特性时,不涉及系统的初始状态,只考虑系统的零状态响应。 系统零状态响应,g(t)f(t)满足均匀性和叠加性,所以系统是线性系统。 因为T{f(t-t0)}=g(t).f(t-to) 而 y(t-t0)=g(t-t0).f(t-t0) ≠T{f(t-t0)},故该系统为时变系统。 因此该系统为线性时变系统 (2)220 [][],(0,1,2,)+===∑k i y k k f i k 解:220[][],(0,1,2,)+== =∑k i y k k f i k 为线性时变系统。
线性系统理论试卷
湘潭大学研究生考试试题 考试科目:线性系统理论/现代控制理论考生人数:20考试形式:闭卷 适用专业: 双控单控/电传 适用年级:一年级 试卷类型: A 类 一、给定多项式矩阵如下: 22121()1 2s s s s D s s s ?? ?????? ++++= ++ 1. 计算矩阵的行次数,判断系统是否行既约? 2. 计算矩阵的列次数,判断系统是否列既约? 3. 寻找单模矩阵,将多项式矩阵()D s 化为史密斯型。 二、设系统的传递函数矩阵为右MFD 1()()N s D s -,其中: 210 ()21s D s s s s ? ? ????? ? -= +-+,()11N s s s ???? =-+ 试判断{}(),()N s D s 是否右互质;如果不是右互质,试通过初等运算找出其最大右公因子。 三、给定()G s 的一个左MFD 为: 1 210 1 0()112 1s s G s s s s -? ? ?? ?????????? ? ? -+= +-+ 试判断这个MFD 是否是最小阶的;如果不是,求出其最小阶MFD 。 四、确定下列传递函数矩阵的一个不可简约左MFD : 21 1 0()102 2s s s G s s s s s ????????? ? ?? += +++ 五、给定系统的传递函数矩阵为
22 3 (1)(2)(1)(2)()31(1)(2) (2)s s s s s s G s s s s s s ???? ?? ??????? ? +++++= +++++ 试计算出相应的评价值,并写出其史密斯--麦克米伦型。 六、给定传递函数矩阵如下: 2 2221156()1253 43s s s s s G s s s s s ???? ?? ??? ? ?? +-++= ++++ 试定出其零、极点,并计算出其结构指数。 七、给定系统的传递函数矩阵如下: 2 2211 154()14 3 712s s s s G s s s s s ???? ?? ??? ? ?? +-++= ++++ 试求出一个控制器型实现。 八、确定下列传递函数矩阵()G s 的一个不可简约的PMD 2 2 141()143 32s s s s G s s s s s ?? ?? ?? ??? ??? ++-= ++++ 九、给定系统的传递函数矩阵如下: 1 2 2 430 11()221 21s s s s G s s s s s -?????? ??????? ?? ? ++-+= +++ 试设计一个状态反馈K,使得状态反馈系数的极点为: 12λ*=-, 23λ*=-, 4,5 42j λ* =-±
实验二线性时不变系统,信号与系统,南京理工大学紫金学院实验报告
信号与系统实验报告 实验名称: 线性时不变系统 姓名: 学号: 班级:通信 时间:2013.5 南京理工大学紫金学院电光系
一、 实验目的 1、 掌握线性时不变系统的特性; 2、 学会验证线性时不变系统的性质。 二、实验基本原理 线性时不变系统具有如下的一些基本特性。 1.线性特性(包含叠加性与均匀性) 对于给定的系统,11()()x t t 、y 和22()()x t t 、y 分别代表两对激励与响应。 对于叠加性:当11()()x t y t ??→,22()()x t y t ??→ 则1212()()()()x t x t y t y t +??→+ 图2.1 对于均匀性: 当()()x t y t ??→, 则()()kx t ky t ??→,0k ≠ 图2.2 综合以上,则当激励是1122()()k x t k x t ?+?时,则对应的响应为 1122()()k y t k y t ?+?。对于线性时不变系统,如果起始状态为零,则系统满足叠加 性与均匀性(线性性)。 2.时不变特性 对于时不变系统, 当11()()x t t ??→y , 则1010()()x t t t t -??→-y
图2.3 3. 微分特性 对于线性时不变系统,当()()x t t ??→y 则 ()() dx t dy t dt dt ??→ 图2.4 4. 因果性 因果系统是指系统在时刻0t 的响应只与0t t =和0t t <时刻的输入有关。 也就是说,激励是产生响应的原因,响应是激励引起的后果,这种特性称为因果性。通常由电阻器、电感线圈、电容器构成的实际物理系统都是因果系统。 二、 实验内容及结果 记录实验过程中的输入输出波形。 1、线性特性 1).叠加性观察 (1) 设置信号产生模块为模式3(11) ; (2) 用按键1使对应的“信号A 组”的输出1-x 2信号(信号A 组的信号输出指示灯为001011):记录波形为x1(t )
信号与系统 线性时不变系统实验报告
信号与系统实验报告 实验名称:线性时不变系统 姓名: 学号: 班级: 时间:
一、 实验目的 1、 掌握线性时不变系统的特性; 2、 学会验证线性时不变系统的性质。 二、实验基本原理 线性时不变系统具有如下的一些基本特性。 1.线性特性(包含叠加性与均匀性) 对于给定的系统,11()()x t t 、y 和22()()x t t 、y 分别代表两对激励与响应。 对于叠加性:当11()()x t y t ??→,22()()x t y t ??→ 则1212()()()()x t x t y t y t +??→+ 图2.1 对于均匀性: 当()()x t y t ??→, 则()()kx t ky t ??→,0k ≠ 图2.2 综合以上,则当激励是1122()()k x t k x t ?+?时,则对应的响应为 1122()()k y t k y t ?+?。对于线性时不变系统,如果起始状态为零,则系统满足叠加 性与均匀性(线性性)。 2.时不变特性 对于时不变系统, 当11()()x t t ??→y , 则1010()()x t t t t -??→-y
图2.3 3. 微分特性 对于线性时不变系统,当()()x t t ??→y 则 ()() dx t dy t dt dt ??→ 图2.4 4. 因果性 因果系统是指系统在时刻0t 的响应只与0t t =和0t t <时刻的输入有关。 也就是说,激励是产生响应的原因,响应是激励引起的后果,这种特性称为因果性。通常由电阻器、电感线圈、电容器构成的实际物理系统都是因果系统。 二、 实验内容及结果 记录实验过程中的输入输出波形。 1、线性特性 1).叠加性观察 (1) 设置信号产生模块为模式3(11) ; (2) 用按键1使对应的“信号A 组”的输出1-x 2信号(信号A 组的信号输出指示灯为001011):记录波形为x1(t )
现代控制理论试题
现代控制理论试题 一、 名词解释(15分) 1、 能控性 2、能观性 3、系统的最小实现 4、渐近稳定性 二、 简答题(15分) 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系统的那些性质? 2、如何判断线性定常系统的能控性?如何判断线性定常系统的能观性? 3、传递函数矩阵 的最小实现A 、B 、C 和D 的充要条件是什么? 4、对于线性定常系统能够任意配置极点的充要条件是什么? 5、线性定常连续系统状态观测器的存在条件是什么? 三、 计算题(70分) 1、RC 无源网络如图1所示,试列写出其状态方程和输出方程。其中,为系统的输入,选两端的电压为状态变量 , 两端的电压为状态变量 ,电压 为为系统的输出 y 。 2、计算下列状态空间描述的传递函数 g(s) 3、 求出下列连续时间线性是不变系统的时间离散化状态方程: 其中,采样周期为T=2. 4、 求取下列各连续时间线性时不变系统的状态变量解 和 图1:RC 无源网络
5、确定是下列连续时间线性时不变系统联合完全能控和完全能观测得待定参数a的 取值范围: 6、对下列连续时间非线性时不变系统,判断原点平衡状态即是否为大范围渐近 稳定: 7、给定一个单输入单输出连续时间线性时不变系统的传递函数为 试确定一个状态反馈矩阵K,使闭环极点配置为,和。 现代控制理论试题答案 一、概念题 1、何为系统的能控性和能观性? 答:(1)对于线性定常连续系统,若存在一分段连续控制向量u(t),能在有限时间区间[t0,t1]内将系统从初始状态x(t0)转移到任意终端状态x(t1),那么就称此状态是能控的。 (2)对于线性定常系统,在任意给定的输入u(t)下,能够根据输出量y(t)在有限时间区间[t0,t1]内的测量值,唯一地确定系统在t0时刻的初始状态x(t0 ),就称系统在t0时刻是能观测的。若在任意初始时刻系统都能观测,则称系统是状态完全能观测的,简称能观测的。 2、何为系统的最小实现? 答:由传递函数矩阵或相应的脉冲响应来建立系统的状态空间表达式的工作,称为实现问题。在所有可能的实现中,维数最小的实现称为最小实现。 3、何为系统的渐近稳定性?
MATLAB实验报告——运用MATLAB求解和分析线性时不变系统资料
MATLAB实验报告 课程名称 MATLAB程序设计实验日期 2015 年 05 月 11 日学生姓名学号班级 实验名称运用MATLAB求解和分析线性时不变系统 实验仪器MATLAB7.1 Windows XP 实验目的1.熟悉线性时不变LTI系统在典型激励信号下的响应及其特征。 2.掌握线性LTI系统单位冲激响应的求解方法。 3.熟悉MATLAB的相关函数的调用格式和作用。 4.会用MATLAB对系统进行时域分析。 实验基本原理1.Impulse函数 功能:计算并画出系统的冲激响应。 调用格式: Impulse(sys):其中sys 可以是利用命令tf,zpk或ss建立的系统函数。 Impulse(sys,t)计算并画出系统在向量t定义的时间内的冲激响应。Y=impulse(sys,t):保存系统的输出值。 2.Step函数 功能:计算并画出系统的阶跃响应曲线。
调用格式: Step(sys):其中sys可以是利用命令tf,zpk,或ss 建立的系统。 Step(sys,t):计算并画出系统在向量t定义的时间内的阶跃响应。 3.Lsim函数 功能:计算并画出系统在任意输入下的零状态响应。 调用格式: Lsim(sys,x,t):其中sys可以是利用命令tf,zpk或ss建立的系统函数,x是系统的输入,t定义的是时间范围。 Lsim(sys,x,t,zi):计算出系统在任意输入和零状态下的全响应,sys必须是状态空间形式的系统函数,zi是系统的原始状态。 4.roots函数 功能:计算齐次多项式的根。 调用格式: r=roots(b):计算多项式b的根,r为多项式的根。 5.impz函数 功能: 求离散系统单位脉冲响应,并绘制其时域波形。 调用格式:impz(b ,a) :以默认方式绘出向量a , b 定义的离散系统的单位脉冲响应的离散时域波形. impz(b ,a ,n) :绘出由向量a , b定义的离散系统在0—n (n必须为整数)离散时间范围内的单位序列响应的时域波形. impz(b ,a ,n1:n2) : 绘出由向量a , b定义的离散系统在n1—n2
自动控制系统 线性与非线性的判断
自动控制原理教学探讨——叠加原理与线性系统的 判别问题 四川大学电气信息学院自动化系 赵耀 2014年9月 问题:初始状态不为零的标准线性系统是否满足叠加原理? 例:RC 电路,输入为)t (u i ,输出为)t (u o dt ) t (du C i ) t (u Ri )t (u o i 0 =+= )t (u )t (u dt )t (du RC i o =+∴0 属于标准的线性系统,应当满足叠加原理。 设1=RC ,输出)t (u o 的初值为)(u o 0,输入)t (u i 为阶跃信号,其幅值为A ,则输出响应为 )e (A e )(u )t (u t t o o ---+=10 上式的第一项对应由初始状态引起的零输入响应,第二项对应由输入信号引起的零状态响应。显然,由于零输入响应项的存在,若输入)t (u i 的幅值增大一倍,对应的输出只是零状态响应部分增大一倍,不会整体增大一倍,即整体并不满足叠加原理的均匀性;同样道理,整体看,把2个输入分别作用产生的响应叠加起来并不等于2个输入同时作用产生的响应,即不满足叠加原理的叠加性,只有零状态响应部分满足叠加性。表面上看,似乎系统不满足叠加原理。对于该问题,应当怎么看? 实际上,零输入响应对应的方程为 0 0=+)t (u dt )t (du RC o 即相当于输入0=)t (u i 时的响应,所以应当把系统总的响应看作两部分响应的叠加,即0=)t (u i 所对应的零输入响应加上0≠)t (u i 所对应的零状态响应。这样看,系统就完全满足叠加原理了。 上述分析说明,叠加原理所讲的某个输入产生某个响应,指的是该响应完全由该输入引
离散线性时不变系统分析
实验六 离散线性时不变系统分析 一、 实验目的 1. 掌握离散LSI 系统的单位序列响应、单位阶跃响应和任意激励下响应的MATLAB 求解方法。 2. 掌握离散LSI 系统的频域分析方法; 3. 掌握离散LSI 系统的复频域分析方法; 4. 掌握离散LSI 系统的零极点分布与系统特性的关系。 二、实验原理及方法 1. 离散LSI 系统的时域分析 描述一个N 阶线性时不变离散时间系统的数学模型是线性常系统差分方程,N 阶LSI 离散系统的差分方程一般形式为 ) ()(0 0i n x b k n y a M i i N k k -=-∑∑== (6.1) 也可用系统函数来表示 12001212120()()()()()1M i M i i M N N k N k k b z b b z b z b z Y z b z H z X z a z a z a z a z a z ----=----=++++====++++∑∑ (6.2) 系统函数()H z 反映了系统响应和激励间的关系。一旦上式中k a ,i b 的数据确定了,系统的性质也就确定了。特别注意0a 必须进行归一化处理,即01a =。 对于复杂信号激励下的线性系统,可以将激励信号在时域中分解为单位序列或单位阶跃序列的线性叠加,把这些单元激励信号分别加于系统求其响应,然后把这些响应叠加,即可得到复杂信号作用于系统的零状态响应。因此,求解系统的单位序列响应和单位阶跃响应尤为重要。由图6-1可以看出一个离散LSI 系统响应与激励的关系。 图6-1 离散LSI 系统响应与激励的关系 (1) 单位序列响应(单位响应) 单位响应()h n 是指离散LSI 系统在单位序列()n δ激励下的零状态响应,因此()h n 满足线性常系数差分方程(6.1)及零初始状态,即 00()()N M k i k i a h n k b n i δ==-=-∑∑, (1)(2)0h h -=-== (6.3) 按照定义,它也可表示为 ()()()h n h n n δ=* (6.4) 对于离散LSI 系统,若其输入信号为()x n ,单位响应为()h n ,则其零状态响应()zs y n 为 ()()*()zs y n x n h n = (6.5) 可见,()h n 能够刻画和表征系统的固有特性,与何种激励无关。一旦知道了系统的单位响应()h n ,就可求得系统对任何输入信号()x n 所产生的零状态响应()zs y n 。 MATLAB 提供了专门用于求连续系统冲激响应的函数impz(),其调用格式有
线性系统理论MATLAB大作业
兰州理工大学2015级线性系统理论大作业 线性系统理论Matlab 实验报告 1、在造纸流程中,投料箱应该把纸浆流变成2cm 的射流,并均匀喷洒在网状传送带上。为此,要精确控制喷射速度和传送速度之间的比例关系。投料箱内的压力是需要控制的主要变量,它决定了纸浆的喷射速度。投料箱内的总压力是纸浆液压和另外灌注的气压之和。由压力控制的投料箱是个耦合系统,因此,我们很难用手工方法保证纸张的质量。 在特定的工作点上,将投料箱线性化,可以得到下面的状态空间模型: u x x ?? ????+??????-+-=0001.0105.0002.002.08.0. []21,x x y = 其中,系统的状态变量x1=液面高度,x2=压力,系统的控制变量u1=纸浆流量u2=气压阀门的开启量。在上述条件下,试设计合适的状态变量反馈控制器,使系统具有实特征根,且有一个根大于5 解:本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数时系统不稳定,这样的设计是无意义的,故而不妨采用状态反馈后的两个期望特征根为-7,-6,这样满足题目中所需的要求。要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控。 Matlab 判断该系统可控性和求取状态反馈矩阵K 的程序,如图1所示,同时求得加入状态反馈后的特征根并与原系统的特征根进行了对比。
图1系统能控性、状态反馈矩阵和特征根的分析程序上述程序的运行结果如图2所示: 图2系统能控性、反馈矩阵和特征根的运行结果
线性时不变系统实验报告
实验二:线性时不变系统 一、 实验目的 1. 掌握线性时不变系统的特性; 2. 学会验证线性时不变系统的性质 二、 实验仪器 1. ZH5004”信号与系统”实验箱 2. 20MHz 示波器 三、 实验原理 齐次性若激励f(t)产生的响应为y(t),则激励Af(t)产生的响应即为Ay(t),此性质即为齐次性。其中A 为任意常数。 f(t)系统y(t),Af(t)系统Ay(t) 叠加性若激励f1(t)与f2(t)产生的响应分别为y1(t), y2(t),则激励f1(t)+f2(t)产生的应即为y1(t)+y2(t),此性质称为叠加性。 线性若激励f1(t)与f2(t)产生的响应分别为y1(t), y2(t),则激励A1f1(t)+A2f2(t)产的响应即为A1y1(t)+A2y2(t),此性质称为线性。 时不变性若激励f(t)产生的响应为y(t),则激励f(t-t0)产生的响应即为y(t-t0),此性质称为 不变性,也称定常性或延迟性。它说明,当激励f(t)延迟时间t0时,其响应y(t)也延迟时间t0,且波形不变。 微分性若激励f(t)产生的响应为y(t),则激励f'(t)产生的响应即y’(t),为此性质即为微分性。 积分性若激励f(t)产生的响应为y(t),则激励f(t)的积分产生的响应即为y(t)的积分。此性质称为积分性。 因果系统是指在 0t t =时刻的响应只与0t t ≤时刻的激励有关的系统,即如果输入信号满足条件()0,0t t t x <=,则输出信号满足条件()0,0t t t y <=,这里假定系统是零起始状态。否则系统是非因果系统。所有的即时系统都是因果系统。 信号的因果性:如果一个信号()t f 满足条件()0, 0<=t t f ,则信号()t f 称为因果信 号。因果信号一般表示为()()t u t f 的形式。
线性系统理论试题
江 西 理 工 大 学 考 试 试 卷 试卷编号:1112021120B 一、(15分)考虑如图1的质量弹簧系统。其中,m 为运动物体的质量,k 为弹簧的弹性系数,h 为阻尼器的阻尼系数,f 为系统所受外力。取物体位移为状态变量x 1,速度为状态变量x 2,并取位移为系统输出y ,外力为系统输入u ,试建立系统的状态空间表达式。 图1 二、(20分)考虑如图2所示系统: 图2 (a ) 给出这个系统状态变量的实现; (b ) 判断系统的能控性 班级 学号 姓名
三、(15分)矩阵A 是22?的常数矩阵,关于系统的状态方程式= x Ax ,有 1(0)1??=??-??x 时,22t t e e --??=??-??x ;2(0)1?? =??-??x 时,2t t e e --??=??-?? x 。 试确定状态转移矩阵(,0)t Φ和矩阵A 。 四、(15分)试求下列系统的能观性分解 ?? ???=? 101x 412- bu Ax u x +=????? ?????+? ????-100301 [1=y 1- ]cx x =1 五、(20分)(1)利用Lyapunov 第一方法判断系统平衡点0x =的稳定性(10分) 111222124sin 331x x x x x x x e x =+-=-++ (2)取Q I =,通过求解Lyapunov 方程判断系统平衡点0x =的稳定性(10分) 1153x x ??=??--?? 六、有两个能控能观的单输入—单输出系统: 1S :111104310u x x ? ? ? ???+???? ??-=? []1112x y = 2S :2222U x x +-=? 22x y = (1)按图把1S 、2S 串联,针对[]12x x x =推导状态方程。 (2)判断以上系统的能控性和能观性。 (3)把串联系统的连接顺序颠倒过来,再推算系统的状态方程及能控、能观性。 (4)求1S 、2S 及串联系统的传递函数矩阵,并对(2)和(3)讨论。
数字信号处理实验二 求线性时不变系统的输出
学生实验报告 开课学院及实验室: 电子楼317 2013年 3 月18 日 学院 机械与电气工程学院 年级、专业、班 姓名 学号 实验课程名称 数字信号处理实验 成绩 实验项目名称 实验二 求线性时不变系统的输出 指导老师 一、实验目的 1. 学习用递推法求解差分方程的方法。 2. 学习用线性卷积法求网络输出的方法。 二、实验原理 一般网络或系统用线性常系数差分方程描述,如果已知差分方程和输入信号,用递推法求解差分方程或者求网络输出,最适合用计算计求解。但要注意N 阶差分方程要预先给定N 个初始条件。下面用例子说明用递推法求解差分方程的方框图。例如一个二阶差分方程如下: 1201()(1)(2)()(1)y n a y n a y n b x n b x n =-+-++- 式中,系数1a 、2a 、 0b 、1b 为已知系数,()x n 是输入序列。设()x n 是因果序列,0)1(=-x ,从 0n =开始递推。当0n =时, 1201(0)(1)(2)(0)(1)y a y a y b x b x =-+-++- 120(1)(2)(0)a y a y b x =-+-+ 式中,(1)y -和(2)y -是两个初始条件,要预先给定。这样求解网络输出的计算框图如图 2.1 所示。 图中,N 表示递推了N 步,即y (n )的长度。 如果用差分方程求系统的单位脉冲响应()h n ,也可以用上面的计算框图。因为()h n 是系统输入 ()n δ时的零状态响应,因此计算框图中全部的初始条件为0,且()()x n n δ=。这样递推得到 ()()y n h n =。 已知()h n 和输入()x n ,求系统输出()y n ,也可以用线性卷积法进行。线性卷积法的公式如下: ()()()y n x n h n =* ()()m x m h n m ∞ =-∞ = -∑ 图2.1 用递推法求解差分方程的框图 计算时,关键问题是根据()x n 和()h n 的特点,确定求和的上下限。例如,()0.9()n h n u n =, 10()()x n R n =,卷积公式为 10()()0.9()n m m y n R m u n m ∞ -=-∞ = -∑ 根据上式中的10()R n ,限制非零区间为:09m ≤≤,由()u n 限制非零区间为:m n ≤。由上面的不等式知道m 的取值和n 有关,可以分几种情况: 当n <0时,
实验一求线性时不变系统的输出
实验一、求线性时不变系统的输出 一、实验目的:学习用线性卷积法求网络输出的方法。 二、实验原理: 一般网络或系统用线性常系数差分方程描述,如果已知差分方程和输入信号,用递推法求解差分方程或者求网络输出,最适合用计算计求解。 三、实验内容 (一)用递推法求解差分方程: 实验编程: %yn=0.9y(n-1)+x(n) %x(n)=R_10(n),y(-1)=1; %x(n)=R_10(n),Y(-1)=0; xn=[ones(1,10),zeros(1,30)]; ys=1; B=1;A=[1,-0.9]; xi=filtic(B,A,ys); yn=filter(B,A,xn,xi); n=0:length(yn)-1; subplot(1,2,1);stem(n,yn,'.') title('初始条件y(-1)=1,输出y(n)');xlabel('n');ylabel('y(n)'); ys2=0; xi2=filtic(B,A,ys2); yn2=filter(B,A,xn,xi2); n2=0:length(yn2)-1; subplot(1,2,2);stem(n,yn,'.')
title('初始条件y(-1)=0,输出y(n)');xlabel('n');ylabel('y(n)'); 运行结果如下图: (二)用线性卷积法求网络输出: 1、实验编程: n=0:30; hn=0.9.^n; xn=[ones(1,10),zeros(1,20)];
n1=0:59; yn=conv(hn,xn); stem(n1,yn,'.') xlabel('n');ylabel('y(n)'); 2、运行结果如下图: