红外线避障传感器电路设计

传感器电路设计
清洁机器人上安装有多种传感器:各种红外传感器、碰撞传感器和霍尔速度传感器。这些传感器协调工作,保证了机器人对外界环境和自身运动状态的判断。
传感器布局
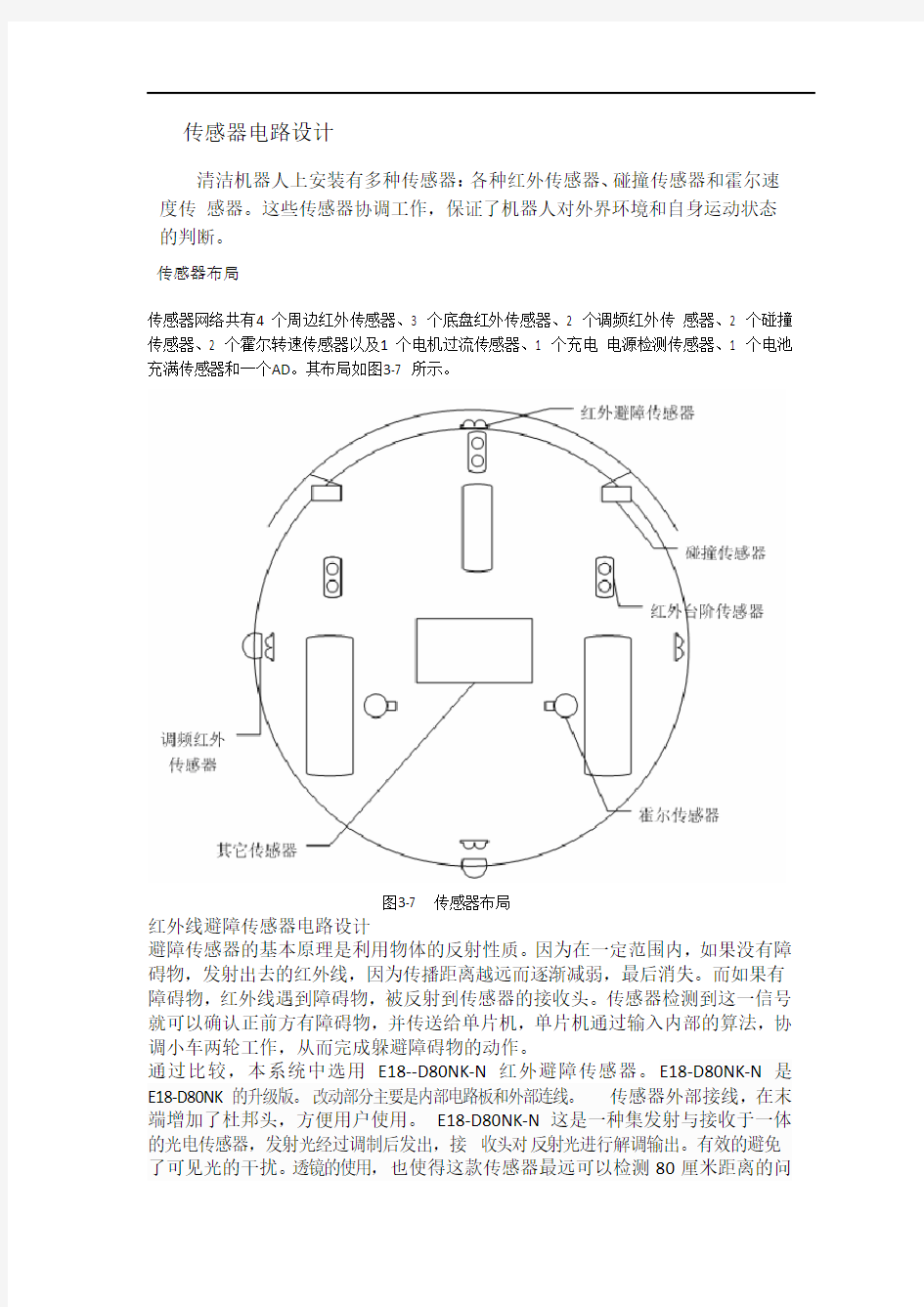
传感器网络共有4个周边红外传感器、3 个底盘红外传感器、2 个调频红外传感器、2 个碰撞传感器、2 个霍尔转速传感器以及1个电机过流传感器、1 个充电电源检测传感器、1 个电池充满传感器和一个A D。其布局如图3-7 所示。
图3-7 传感器布局
红外线避障传感器电路设计
避障传感器的基本原理是利用物体的反射性质。因为在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。而如果有障碍物,红外线遇到障碍物,被反射到传感器的接收头。传感器检测到这一信号就可以确认正前方有障碍物,并传送给单片机,单片机通过输入内部的算法,协调小车两轮工作,从而完成躲避障碍物的动作。
通过比较,本系统中选用E18--D80NK-N红外避障传感器。E18-D80NK-N是E18-D80NK的升级版。改动部分主要是内部电路板和外部连线。传感器外部接线,在末端增加了杜邦头,方便用户使用。E18-D80NK-N这是一种集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射光进行解调输出。有效的避免了可见光的干扰。透镜的使用,也使得这款传感器最远可以检测80厘米距离的问
题(由于红外光的特性,不同颜色的物体,能探测的最大距离也有不同白色物体最远,黑色物体最近)。检测障碍物的距离可以根据要求通过尾部的电位器旋钮进行调节。该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点,可以广泛应用于机器人避障、流水线计件等众多场合。E18--D80NK-N的工作电压为5V,工作电流为10--15mA,驱动电流为100mA,探测距离为3--80cm。E18--D80NK-N也是一个数字传感,其为NPN型光电开关,输出状态是0和1,即数字电路中的低电平和高电平;检测到目标是高电平输出,正常状态是低电平输出。此时可以通过旋转传感器后面的按钮,改变传感器可以测量的距离,比如可以通过调节旋钮,使它测5cm距离以内是否有障碍物,如果5cm以内有物体则返回一个高电平,同时传感器里面的绿色小灯被点亮。本系统需要可以测得距离是否有变化的传感器,所以该传感器可以胜任。本系统共用4个E18--D80NK-N红外避障传感器,通过调节旋钮,使它们可以测得设定距离以内的障碍物,这样当机器人处在障碍物设定距离内的地方时,传感器返回低电平,被单片机检测到并作相应的处理。
我们利用上述传感器设计如下图所示电路,其中D1发射红外线,D2接受红外线信号。LM231(此芯片待定)的第5、7引脚为频率的设定端,一般通过调整其外接可变电阻来改变频率。红外载波信号来自其第7脚,也就是说载波信号与频率一致时,能够极大的提高抗干扰特性。当接收到的红外载波信号和频率一致时,说明不是干扰,则第6脚输出低电平。
红外信号经反射后,由探头的光敏三极管接收反射光,经过RC滤波电路及LM741组成的并联负反馈放大电路对信号进行放大,输出频率的方波送到LM231中进行解调,然后经其内部的比较器转换为数字信号经由6号脚输出。
图3-8 红外传感电路
本电路既简化了线路和调试工作,又防止了周围环境变化和元件参数变化对收发频率造成的差异,实现了红外线发射和接收工作频率的自动同步跟踪,使电路的稳定性和抗干扰能力大大加强。
碰撞传感器
接触传感器通过与目标物体的接触来识别障碍物,选择OTH8084型微动开关作为接触传感器,如图所示,该型号开关结构小巧,使用便捷可靠,信号无需调理。
碰撞传感器检测单元的接口电路如图所示,图中OUT接控制器2的INTI端口(另一检测单元接口),L1的限流电阻,S9为接触传感器,其脚1接地,当碰触到障碍物时,探测簧片被压下,传感器的1脚和3脚导通,工作电路形成回路,OUT端输出低电平。OUT端输出的低电平能够直接被控制器识别。碰撞传感器主要是用于小车检测左右侧或前方障碍物所用。
图3-9
红外台阶检测传感器
红外台阶检测使用集成的红外传感器,其外形如图所示。其引脚定义为 1 脚电源地,2 脚电源正,3 脚信号输出端。当传感器前方没有物体时,其输出高电平,有物体时输出为低电平。使用时不需要再外接元件,只需要给其提供+5V 的电源就可以工作,但有效检测距离较近,比较适用于机器人地盘用于台阶的检测。
图3-10 集成红外传感器外形图
机器人地盘上共使用了三个集成的红外传感器,分别安装在两个驱动轮的前端和随动轮的前端,三个传感器的输出信号相或,这样只要其中任意一个传感器检测不到地面(遇到有台阶情况),输出即为高电平,单片机检测到这个高电平就立即停止前进,防止跌落。具体电路见图3-11,或门使用两输入端四或门芯片7432。
霍尔传感器的测速电路设计
当电流流过霍尔传感器时,产生的磁场聚集在磁环内,通过磁环气隙中霍尔元件进行测量并放大输出,其输出电压V精确的反映原边电流。
Q1
NPN
R1
4.7k
R2
1k
VCC
图3-11 霍尔传感器的测速电路
上述的电路只是霍尔元器件测速的部分电路,需要在其左端接入霍尔元件,右端可以接入计数器,这样可以更好地得到计算结果。
多传感器信息融合
多传感器信息融合、自动充电技术和定位及路径规划技术,通过融合处理综合分析来自各个传感器的信息,利用各种传感器性能上的差异与互补性,获取有效、可靠、完整的信息。采用这种方法,即使各个传感器所提供的信息有一定
的误差和不确定性,但通过对它们提供的信息进行有效的综合,仍可以获取比任何单一传感器信息更可靠、更完整的融合结果。因此多传感器信息融合技术在吸尘机器人的开发上具有很大的应用价值。
电涡流传感器的研究与探讨汇总
档案编号: 毕业设说明书题目:电涡流传感器的研究与探讨 系别:电气工程系 专业:生产过程自动化 班级: 姓名: 指导教师: (共18 页) 年月日
摘要:电涡流传感器是基于涡流效应的新型传感器。由于它具有结构简单、抗干扰能力强、测量精度高、非接触、响应速度快、不受油污等介质影响等优点,因而得到了广泛的应用。但目前的电涡流位移传感器存在着测量范围小,传感器存在非线性问题,这给传感器的应用造成了一定的影响。 本文首先通过对实验室所用的电涡流传感器实验模板的电路进行研究和优化,进而提高电路的抗干扰能力使测量结果的更加准确。其次针对电涡流位移传感器存在的测量范围小,传感器存在非线性问题的改善提出设想即:先对电涡流位移传感器用于位移检测的工作原理及应用进行分析,研究了线圈截面形状及参数变化对涡流传感器线性测量范围和灵敏度的影响;再从电路设计方面提高传感器的稳定性及抗干扰能力,从而为位移测量扩展量程打下基础;最后通过对电涡流传感器测位移实验进行分析处理得出电涡流传感器位移测量范围的扩展方法和改善电涡流传感器非线性问题的方法。 关键词:电涡流传感器; 位移测量; 非线性; 测量范围 Abstract: the eddy current sensor is a new type of sensor based on eddy current effect. Because it is simple in structure, strong anti-jamming capability, high accuracy, non-contact, fast response, not polluted advantages such media influence, and been widely used. But the current electricity eddy displacement sensor measurement range small, there exist nonlinear problem, the sensor to a sensor applications has caused some influence. This paper firstly eddy current sensor used in the laboratory experiment template circuit research and optimization, and improve the anti-interference ability of the circuit more accurate measurement results. Secondly according to the eddy current displacement sensor measurement range small, there exist nonlinear problem of sensor to improve it puts forward the idea of the eddy current is: first displacement detection sensors for displacement of the working principles and applications, research analyzed the coil cross-section
红外避障小车讲解
目的: 本毕业设计是红外蔽障小车的设计,通过设计使学生系统的熟悉和掌握单片机控制系统设计方面的内容体系、开发流程和程序设计,培养学生具有综合运用所学的理论知识去开拓创新及解决实际问题的能力。培养学生掌握设计题的思想和方法,树立严肃认真的工作作风、培养学生调查研究、查阅技术文献、资料、手册以及编写技术文献的能力。同时是为了掌握电路设计的方法和技巧。如何将学习到的理论知识运用到实际当中去,怎样能够活学活用,深入的了解电子元器件的使用方法,了解各种元器件的基本用途和方法,能够灵活敏捷的判断电路中出现的故障,学会独立设计电路,积累更多的设计经验,加强焊接能力和技巧,完成基本的要求。并能完美的完成这次实训。 目录 一、任务书...............................P1 二、引言..............................P2 二、要求与发挥...........................P4 三、设计摘要.............................P6 四、模块方案比较.......................P7 1.避障模块 2.驱动模块
3.控制模块 五、程序设计.........................P9 1.程序流程图 2.程序编写 六、工作原理.........................P13 七、结论............................P13 八、参考文献........................P14 九、毕业设计(论文)成绩评定表.....P15 任务: 利用单片机、红外实现避障,要求具有下述功能: 1.小车前进可以避开(前、左、右)20cm的障碍物; 2.实现下车前进时,不碰障碍物; 3.具有声音播报功能。 引言 随着微电子技术的不断发展,微处理器芯片的集成程度越来越高,单片机已可以在一块芯片上同时集成CPU、存储器、定时器、并行和串行接口、看门狗、前置放大器、A/D转换器、D/A转换器等多种电路,这就很容易将计算机技术与测量控制技术结合,组成智能化测量控制系统。这种技术促使机器人技术也有了突飞猛进的发展,目前人
传感器电路设计毕业论文范文
毕业设计 设计题目:传感器电路设计
目录 1. 引言 1 2. 溶解氧传感器简介 1 3.信号输入部分电路 4 3.1 电源滤波电路图 4 3.2 信号放大电路 5 3.2.1信号放大电路图 5 3.3 AD623放大器简介 6 3.3.1AD623放大器的特点 6 3.3.2AD623放大器的工作原理 6 4 单片机电路7 4.1 单片机电源电路图8 4.2 89LPC925芯片简介8 4.2.1 P89PLC925芯片主要功能8 4.2.2 P89PLC925的低功耗选择11 4.2.3 P89PLC925的极限参数11 4.2.4 P89PLC925芯片管脚图11 5.MiniICP下载线的电路连接13 6.PCB板的绘制13 7.程序流程14 8. 总结16 参考文献16
传感器电路设计 摘要:溶解氧数字化传感器是应用单片机控制的智能化传感器,它可以对液体中溶解氧 的含量进行准确的测量。本设计从总体上介绍了溶解氧数字化传感器的工作原理,着重介 绍了电路元器件的选取以及输入信号的放大和P89LPC925芯片的工作原理,利用P89LPC925 芯片实现对溶解氧浓度的准确测量。 关键词:溶解氧传感器;P89LPC925;AD623 The design of the dissolved oxygen sensor (College of Physics and Electronic Engineering, Electrical Engineering and Its Automation, Class2 Grade2003, 0323110235) Abstract:Dissolved oxygen digital sensor is a king of intelligent sensor which use single-chip computer to control, it could measure the oxygen dissolved in liquid accurately. This design introduces the work principle of dissolved oxygen digital sensor, it introduces the selection of the circuit components and amplification of input signals and the work principle of P89LPC925 chip, P89LPC925 chip using the dissolved oxygen concentration on the measurement accuracy. Key Words: dissolved oxygen sensor; P89LPC925; AD623 1 引言 氧是维持人类生命活动必不可少的物质,它与人类的生存息息相关。氧也是与化学、生化反应、物理现象最密切的一种化学元素,无论是在工业、农业、能源、交通、医疗、生态环境等各个方面都有重要作用。特别是在水产养殖中,水体溶解氧对水中生物如鱼类的生存有着至关重要的影响。缺溶氧(溶解氧低于4mg/L)时将导致水生物窒息死亡;低溶氧导致水生物生长缓慢,增重率低而饵料系数高,对疾病的抵抗能力发病率高,生物的生长受到限制;高溶氧时某些鱼类幼体可能会出现气泡病。因此溶解氧浓度的精确测量显得尤为重要。 2 溶解氧传感器简介 溶解氧是溶解在水中的分子态氧,该定义是可查资料[1]-[4],随着科技和经济的发展,溶解氧测量已从水介质延伸到了非水液体介质,如丙酮、苯、氯苯、环乙烷、甲醇、正辛烷。分布方式有水平分布和垂直分布两种.溶解氧的一个来源是水中溶解氧未饱和时,大气中的氧气向水体渗入;另一个来源是水中植物通过光合作用释放出的氧。溶解氧随着温度、气压、盐分的变化而变化,一般说来,温度越高,溶解的盐分越大,水中的溶解氧越低;气压越高,水中的溶解氧越高。
电涡流传感器的设计
引言 电涡流传感器具有灵敏度高、分辨力高、线性度高、重复性好、结构简单、抗干扰能力强、线性测量范围宽、安装方便、非接触测量、耐高温、能在油、汽、水等恶劣环境下长期连续工作的特点以及能够实现信息的远距离传输、记录、显示和控制的优势,被广泛应用于工业生产和科学研究等领域的位移、振动、偏心、胀差、厚度、转速等物理量的在线检测和安全保护,为精密诊断系统提供了全息动态特性。因而对于电涡流传感器的研究有着深远的理论和实践意义。 目前,对电涡流传感器的研究,主要集中在电磁学模型机理的研究、线圈几何形状的优化设计、测量精度的提高、非线性的线性化和应用范围的拓展等方面。本文提出了一种新型的电涡流传感器设计方案,具有速度快、功耗低、稳定性好等诸多优点,并已广泛应用于电力、石化、冶金、钢铁、航空航天等领域,取得了非常好的效果,得到了用户的一致好评。 1 电涡流传感器的基本工作原理[1-2] 电涡流传感器的基本工作原理是基于电涡流效应。根据法拉第电磁感应定律可知:金属导体置于变化的磁场中时,导体表面就会有感应电流产生。电流的流线在金属导体内自行闭合,这种由电磁感应原理产生的旋涡状感应电流称为电涡流,这种现象称为电涡流效应,电涡流传感器就是利用电涡流效应来检测导电物体的各种物理参数的。如图1所示。 理论和实践均证明:电涡流的大小与导体的磁导率ξ、电导率σ、线圈与导体之间的距离D 、激励电流强度I 、激励电流角频率ω、线圈尺寸因子等参数有关。探头线圈的阻抗Z 是上述参数的函数,即Z =F (,ξ, σ, D , I,ω) 。 很显然,如果只改变其中的某一参数,其他参数恒定,阻抗就成为该参数的单值函数。假设被测金属导体材质均匀,且具有线性和各向同性的性能特点,我们可以控制,ξ, σ, I ,ω这几个参数在一定范围内不变,则阻抗就成为距离的单值 函数,再通过前置器电子线路的处理,将探头线圈阻抗的变化,即探头线圈与金属导体之间的距离的变化转化为电压或电流的变化。输出信号的大小随探头到被测体表面之间的距离而变化,电涡流传感器正是基于这样的原理实现对位移、振动、胀差、偏心等的测量。 图1 电涡流传感器的工作原理 2 电涡流传感器电路设计 2.1 测量电路的选择[3-5] 电涡流传感器的测量电路可分为调频式和调幅式两种,调幅式测量电路又可细分为恒定频率的调幅式和频率变化的调幅式两种。 调幅式测量电路是指以输出高频信号的幅度来反映电涡流传感器探头与被测金属导体之间的关系。其特点是:输出可以被调理为直流电压,而对直流电压进行数据采集的速度快、时间短、可以降低功耗。 调频式测量电路是指将探头线圈的电感量与微调电容构成振荡器,以振荡器的频率作为输出量的一种转换电路。其优点是:电路结构简单,抗干扰能力强,性能较稳定,分辨率和精度高,易与计算机连接,频率输出便于数据采集和处理,成本较低。 在本设计中我们采用调幅式电路。2.2 滤波、稳压、同相比例放大电路的设计 该部分电路的作用是消除直流电源中的交流成分以及电源电压的波动所造成的影响。如图2所示。 2.3 振荡电路的设计[6] 电感三点式振荡电路:由于反馈支路是电感,振荡器的输出波形中含有较多的高次谐波,且振荡频率不高,对本设计不适用,故不予采用。 电容三点式振荡电路:由于输出端和反馈支路均为电容,对高次谐波电抗小,反馈电压中高次谐波分量很少,振荡频率稳定度高,因而输出波形好,更接近正弦 波。振荡频率可以较高。符合本设计的要求,故采用。如图3所示。 图3 电容三点式振荡电路 在本设计中,为了保证振荡电路输出信号的稳定和可靠,我们采取了如下措施: 针对电源电压的变化,在电源端添加了稳压环节;针对负载变化,在振荡电路与负载之间插入了缓冲电路以屏蔽负载的影响;针对环境温度变化,采用了温度系数较小的元件,例如云母电容等;针对外界磁场会引起磁性材料磁导率的变化,影响传感器线圈的涡流效应,将振荡器密封在传感器壳体内,起到屏蔽作用,可减少回路与外界发生的电磁耦合。 2.4 检波、滤波电路的设计 检波、滤波电路将电容三点式振荡器的输出信号,经过检波、滤波,将其转换为直流信号。通过对电路的优化设计,对元器件一致性的筛选以及电阻、电容参数的合理选配,使得该电路既能保证独立线性指标的要求,又能满足对动态响应时间指标的要求,同时还要尽可能降低直流信号输出的交流噪声。检波、滤波电路如图4所示。 2.5 对数运算电路的设计[7] 电涡流传感器的设计 伍艮常 株洲职业技术学院,湖南株洲 412001 DOI :10.3969/j.issn.1001-8972.2011.12.076 图2 滤波、稳压、同相比例放大电路
红外避障传感器原理图77
一、实验原理: 避障传感器基本原理,和循迹传感器工作原理基本相同,利用物体地反射性质.在一定范围内,如果没有障碍物,发射出去地红外线,因为传播距离越远而逐渐减弱,最后消失.如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头.传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列地处理分析,协调小车两轮工作,完成一个漂亮地躲避障碍物动作,传感器原理图如图6. 图6 红外避障传感器原理图 1、把红外避障传感器固定在小车地正前方,接好线.注意:红外传感器地避障距离也是可调,调节滑动变阻器可以调节避障距离. 2、编制程序,实现小车检测到前方有障碍物时,向左转弯,再检测,没有障碍物,继续前进,有障碍物,继续左转弯.
图7 避障传感器与单片机连接图 四、红外避障传感器电路分析: 电路中HEF4011BT是一个4通道2输入与非门.455是晶振,它产生38k地方波,HEF4024BT是7位二进制计数器,38k地方波作为计数器HEF4024BT地时钟输入.HEF4024BT地O2与O3接与非门加一个非门去控制HEF4024BT地复位端.也就是说当HEF4024BT计数到第四位与第三位同时为1时,HEF4024BT就会被清零.同时当HEF4024BT地O3为1时,HEF4011BT地O4为低电平,触发红外发光二极管发送信号.当HEF4024BT地O3为0时,HEF4011BT地O4为高电平,关闭发光二极管,这段时间为4个方波周期.也就实现了38k载波调制地红外.接收头是红外线一体化接收头是集红外接收、放大、滤波和比较器输出地模块.当收到信号时,OUT端输出低电平,LEDR被点亮,指示收到信号,前方有障碍物.没有收到信号,OUT端输出反之. 五、实验源程序: #define uchar unsigned char #define uint unsigned int #define MOTOR_C P0 //P0口作为电机地控制口. #define SIGNAL P1 //P2口地低两位为循迹传感器输入口. #define SHELVES 25 //速度总档数. #define BACK 0xA5 //后退 #define FORWARD 0xC6 //前进 sbit PWM_R = P0^7; //右电机PWM输入口 sbit PWM_L = P0^2; //左电机PWM输入口 void timer_init( void ); //定时器初始化函数.
传感器应用电路设计.
传感器应用电路设计 电子温度计 学校:贵州航天职业技术学院 班级:2011级应用电子技术 指导老师: 姓名: 组员:
摘要 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。 本文将介绍一种基于单片机控制的数字温度计。在件方面介绍单片机温度控制系统的设计,对硬件原理图做简洁的描述。系统程序主要包括主程序、读出温度子程序、温度转换命令子程序、计算温度子程序、显示数据刷新子程序。软硬件分别调试完成以后,将程序下载入单片机中,电路板接上电源,电源指示灯亮,按下开关按钮,数码管显示当前温度。由于采用了智能温度传感器DS18B20,所以本文所介绍的数字温度计与传统的温度计相比它的转换速率极快,进行读、写操作非常简便。它具有数字化输出,可测量远距离的点温度。系统具有微型化、微功耗、测量精度高、功能强大等特点,加之DS18B20内部的差错检验,所以它的抗干扰能力强,性能可靠,结构简单。 随着科技的不断发展,现代社会对各种信息参数的准确度和精确度的要求都有了几何级的增长,而如何准确而又迅速的获得这些参数就需要受制于现代信息基础的发展水平。在三大信息信息采集(即传感器技术)、信息传输(通信技术)和信息处理(计算机技术)中,传感器属于信息技术的前沿尖端产品,尤其是温度传感器技术,在我国各领域已经引用的非常广泛,可以说是渗透到社会的每一个领域,人民的生活与环境的温度息息相关,在工业生产过程中需要实时测量温度,在农业生产中也离不开温度的测量,因此研究温度的测量方法和装置具有重要的意义。 测量温度的关键是温度传感器,温度传感器的发展经历了三个发展阶段:①传统的分立式温度传感器②模拟集成温度传感器③智能集成温度传感器。 目前的智能温度传感器(亦称数字温度传器)是在20世纪90年代中期问世的,它是微电子技术、计算机技术和自动测试技术(ATE)的结晶,特点是能输出温度数据及相关的温度控制量,适配各种微控制器(MCU)。社会的发展使人们对
红外避障传感器简介
红外避障传感器介绍(反射型)日期:2006-5-16 14:05:14 来源: 点击: 1572 添加到收藏夹 实图: 技术指标: 主体外形尺寸:23×15.3×15.1mm(长×宽×高) 重量:7g 额定电压:直流电源5.0V 检测范围(反射面为白色木板):1~ 40cm(挡板为白色时检测距离在40cm时达到临界点,超过此数值后检测效果变差) 调节方式:多圈电阻式调节,逆时针方向旋转功率变小,顺时针方向旋转功率变大 返回值:有信号(高电平)返回值为“1”,无信号(低电平)返回值为“0” 状态指示方式:检测到信号指示灯亮红灯,无信号不亮 安装方式:单颗?3螺丝安装
线长:17.4cm±0.2cm(有效距离) 连接方式:单条3芯排线,2510型3脚插头 有效角度:30 左右 原理与功能 红外避障传感器(以下简称红外)。红外具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接 应用介绍: 红外是通过发射端发射红外信号,接收端接收由障碍物反射回来的红外信号,来判断是否有障碍物。
项目应用 红外避障传感器在很多项目中都有使用。 在初中灭火、高中搜救项目中,机器人可以通过红外避障传感器走迷宫; 在轨迹项目中,机器人可以通过黑、白色对红外线的反射和吸收值不同而用红外避障传感器来识别黑色的轨迹线。 注意事项: 1、红外是数字传感器,红外接收管只有在接收到一定强度的红外信号时才会有数值的变化。障碍物(反射面)太小时,红外会检测不到;障碍物(反射面)颜色为黑色或深色时,会被吸收大部分的红外信号,而只反射回一小部分,导致红外接收管接收到的红外信号强度不够,不足以产生有障碍物(反射面)的信号。 2、红外在暖光源的照射下(如白炽灯、太阳光)检测受到很大影响,它会受到所有相近红外信号的干扰,白炽灯和太阳光中含有红外信号成分较多,对红外的影响也较大。红外相互之间也存在干扰,因而在使用时需要注意。 3、红外采用的是发射、接收原理,不同反射面对红外信号的吸收与散射,将影响其检测范围,根据测试红色的反射面效果最佳,白色其次,黑色最差;同时反射面的粗糙度和平整度也会影响检测的效果。
位移电涡流传感器测量电路设计)
成绩评定:_______ 传感器技术 课程设计 题目位移电涡流传感器测量电路设计
电涡流传感器由于具有对介质不敏感、非接触的特点, 广泛应用于对金属的位移检测中。为扩大电涡流传感器的测量范围, 采用恒频调幅式测量电路, 引用指数运算电路作为非线性补偿环节。利用Matlab计算软件辅助设计了直径为60mn电涡流传感器探头,并结合测量电路进行实验。实验结果表明最大测量范围接近90mm验证了该系统工作的稳定性,证明设计达到了预期效果。关键词: 电涡流传感器; 测量电路;大位移; 线性化
一、设计目的-------------------- 1 二、设计任务与要求- --------------------- 1 2.1 设计任务 ---------------------- 1 2.2 设计要求 ---------------------- 1 三、设计步骤及原理分析--------------- 1 3.1 设计方法----------------------- 1 3.2 设计步骤 ---------------------- 2 3.3 设计原理分析 -------------------- 6 四、课程设计小结与体会--------------- 6 五、参考文献- ------------------------- 6
一、设计目的 1. 了解电涡流传感器测量位移的工作原理和特性。 2. 了解电涡流传感器的前景及用途 二、设计任务与要求 2.1设计任务 扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电路作为非线性补偿环节。验证了该系统工作的稳定性,证明设计达到了预期效果。 2.2设计要求 1. 工作在常温、常压、稳态、环境良好; 2. 设计传感器应用电路并画出电路图; 3. 应用范围:测量物体的位移。 三、设计步骤及原理分析 3.1设计方法 电涡流传感器具有体积小、非接触、对介质不敏感的特点,被广泛应用于对金属位移等的测量中。尽管用电涡流传感器非接触测量位移已经得到广泛的应用但是测量位移的线性范围受到传感器线圈直径的限制,位移测量范围为线圈直径的1/3~1/5,大直径的传感器,其测量范围最大可以接近到直径的1/2。在许多领域希望能进一步扩大传感器的测量范围,以满足大位移的非接触测量。文中采用指数运算电路作为非线性补偿环节来改善传感器原有的传输特性,扩大传感器测量范围。 由电磁感应定律可知:闭合金属导体中的磁通发生变化时,就会在导体中产生闭合的感应电涡流,阻碍磁通量的变化。如图1所示,传感线圈由交流信号激励在产生焦耳热的同时,又要产生磁滞损耗,它们造成交变磁场能量的损失,进而使传感器的等效阻抗Z发生变化。 影响阻抗Z的因素有被测导体的电导率、磁导率、线圈的激励频率f及传感器与被测导体间的位移x等,只要保证这些影响因素只有位移x变化,其他都保持不变,则传感器
红外寻迹避障电路总结讲解
光电传感器 一、反射式光电传感器简介 反射式光电传感器在机器人中有着广泛的应用。可以用来检测地面明暗和颜色的变化,也可以探测有无接近的物体。这种光电传感器的基本原理是,自带一个光源和一个光接收装置,光源发出的光经过待测物体的反射被光敏元件接收,再经过相关电路的处理得到所需要的信息。相应的,光谱范围,灵敏度,抗干扰能力,输出特性等都是反射式光电传感器的重要参数。 二、简单比较型光电传感器 在上左图中,JP1是光电管,接收光强在上面转换成电流,在R上成为电压信号,与RA1的标准值进行比较,从LM339输出逻辑电平给单片机。 R越大,光电流产生的电压变化越大,传感器也就越灵敏。但是若R过大,当光比较强的时候,R上的电压会达到VCC而不再变化,这就是所谓的饱和。在这种比较型的传感器电路中,饱和只会使强光与强光难以分辨,但仍可以区分强光和弱光,它并不是影响比较结果的重要因素。但在后面介绍的几种调制型传感器中,饱和是必须避免的,因为它会掩盖交流分量。高灵敏度和饱和是一对矛盾,在后面提到了一些相关的解决方案。 LM339是开路输出的,10K的电阻是为了使输出电压正确。如果后面是51之类开路输入的单片机,这个电阻可以省略。 假如把光敏管放在下边,电阻放在上边。这样当光线较暗时比较器输入电压接近VCC,超过比较器LM339能够正常工作的最高输入电压Vm,比较器不能正常工作(LM339的共模输入电压最低能低到0,但是最高达不到VCC),因此灵敏度做不高。为了使比较器正常工作,电阻值应使得光照时比较器输入电压Vi大幅下降,满足VCC-I*R 课程设计报告书 2.概述 2.1系统组成框图 系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。传感器部分采用霍尔传感器,负责将电机的转速转化为脉冲信号。信号预处理电路包含待测信号放大、波形变换、波形整形电路等部分,其中放大器实现对待测信号的放大,降低对待测信号的幅度要求,实现对小信号的测量;波形变换和波形整形电路实现把正负交变的信号波形变换成可被单片机接受的TTL/CMOS兼容信号。处理器采用AT89C51单片机,显示器采用8位LED数码管动态显示。本课题采用的是以8051系列的A T89C51单片机为核心开发的霍尔传感器测转速的系统。系统硬件原理框图如图1所示: 图1 系统框图 2.2系统工作原理 转速是工程上一个常用的参数,旋转体的转速常以每分钟的转数来表示。其单位为 r/min。由霍尔元件及外围器件组成的测速电路将电动机转速转换成脉冲信号,送至单片机AT89C51的计数器 T0进行计数,用T1定时测出电动机的实际转速。此系统使用单片机进行测速,采用脉冲计数法,使用霍尔传感器获得脉冲信号。其机械结构也可以做得较为简单,只要在转轴的圆盘上粘上两粒磁钢,让霍尔传感器靠近磁钢,机轴每转一周,产生两个脉冲,机轴旋转时,就会产生连续的脉冲信号输出。由霍尔器件电路部分输出,成为转速计数器的计数脉冲。控制计数时间,即可实现计数器的计数值对应机轴的转速值。单片机CPU将该数据处理后,通过LED显示出来。 2.2.1霍尔传感器 霍尔传感器是对磁敏感的传感元件,由磁钢、霍耳元件等组成。测量系统的转速传感器选用SiKO 的 NJK-8002D 的霍尔传感器,其响应频率为100KHz ,额定电压为5-30(V )、检测距离为10(mm )。其在大电流磁场或磁钢磁场的作用下,能测量高频、工频、直流等各种波形电流。该传感器具有测量精度高、电压范围宽、功耗小、输出功率大等优点,广泛应用在高速计数、测频率、测转速等领域。输出电压4~25V ,直流电源要有足够的滤波电容,测量极性为N 极。安装时将一非磁性圆盘固定在电动机的转轴上,将磁钢粘贴在圆盘边缘,磁钢采用永久磁铁,其磁力较强,霍尔元件固定在距圆盘1-10mm 处。当磁钢与霍尔元件相对位置发生变化时,通过霍尔元件感磁面的磁场强度就会发生变化。圆盘转动,磁钢靠近霍尔元件,穿过霍尔元件的磁场较强,霍尔元件输出低电平;当磁场减弱时,输出高电平,从而使得在圆盘转动过程中,霍尔元件输出连续脉冲信号。这种传感器不怕灰尘、油污,在工业现场应用广泛。 2.2.2转速测量原理 霍尔器件是由半导体材料制成的一种薄片,器件的长、宽、高分别为 l 、b 、d 。若在垂直于薄片平面(沿厚度 d )方向施加外磁场B ,在沿l 方向的两个端面加一外电场,则有一定的电流流过。由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为:qVB f = 式中:f —洛仑磁力, q —载流子电荷, V —载流子运动速度, B —磁感应强度。 这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差H U 称为霍尔电压。 霍尔电压大小为: H U H R =d B I /??(mV) 式中:H R —霍尔常数, d —元件厚度,B —磁感应强度, I —控制电流 设 H K H R =d /, 则H U =H K d B I /??(mV) H K 为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在单位磁感应强度和 单位控制电流下输出霍尔电动势的大小。应注意,当电磁感应强度B 反向时,霍尔电动势也反向。图2为霍耳元件的原理结构图。 红外避障传感器测试结果 一、传感器原理 传感器主动发射红外线,根据反射光探测,类似雷达,如果探测到障碍,传感器的OUT 脚输出0,否则1。 二、测试目的 测试传感器的各项性能是否满项目的测量要求。此传感器在项目设计中是用于测量纸卷厚度的,当纸卷剩余不多的时候需要传感器预报,因此对精度要求小于2mm 。 三、测试内容及方法 1)传感器精度测试 测试中传感器测量距离保持不变,移动被测物体(障碍物),由近及远,直到传感器输出的电平发生变化(由0变到1),停止移动,测量此时被测物体与传感器的距离,重复多次;移动被测物体由远及近,直到传感器输出的电平发生变化(由1变到0),停止移动,测量此时被测物体与传感器的距离,重复多次。 2)回滞性测试 传感器距离设定不变,由于精度等原因,传感器测得的距离是在一定范围变化的,因此具有回滞特性。 表1是根据以上所述的测试方法测得的结果。图1是根据表1绘制的回滞特性曲线。 表1 测试结果 四、测试总结 从表1的数据可以看出,传感器在设定距离不变的情况下,由近及远的误差电平 图1 红外避障传感器的回滞曲线 mm 为3.28mm,由远及近的误差为4.18mm,在设定距离总的误差为6.06mm。因此不符合我们的要求。 同时在测试中发现,传感器在测定距离的电平是动态变化的。理想情况下,障碍物由近及远,传感器输出的电平应该是由0变到1,障碍物由远及近,传感器输出的电平由1变到0。但是在实际测试中,障碍物移动到传感器电平发生变化的距离后,电平还是在变化,而且不规律。波形如图2所示。这是不符合我们要求的。 图2 示波器测得的传感器电平变化 五、测试结论 传感器不符合项目要求。 传感器与测控电路课程设计 说明书 设计题目电感式(螺管型)位移传感器的设计 学校湖南科技大学学院机电工程学院 班级 07级测控一班学号 0703030116 设计人李广 指导教师余以道杨书仪 完成日期 2010 年 6 月 22 日 目录 一、设计题目与要求 (2) 二、基本原理简述 (2) 三、设计总体方案拟定 (7) 四、传感器的结构设计 (8) 五、结构设计CAD图 (12) 六、测控电路的设计与计算 (12) 七、电路框图及电路CAD图 (14) 八、精度误差分析 (14) 九、参考文献 (16) 一、设计题目与要求 1、设计题目:电感式(螺管型)位移传感器的设计 2、设计要求: 采用差动变压器原理设计一个测量位移的传感器,并设计一测控电路对传感器的输出量进行处理,使信号能输入到A/D 转换器,进行一系列的测量与控制。 二、基本原理简述 电感式传感器是利用被测量的变化引起线圈自感或互感系数的变化,从而导致线圈电感量改变这一物理现象来实现测量的。因此根据转换原理,电感式传感器可以分为自感式和互感式两大类。 自感式电感传感器可分为变间隙型、变面积型和螺管型三种类型。 一、 螺管型自感传感器 有单线圈和差动式两种结构形式。 单线圈螺管型传感器的主要元件为一只螺管线圈和一根圆柱形铁芯。传感器工作时,因铁芯在线圈中伸入长度的变化,引起螺管线圈自感值的变化。当用恒流源激励时,则线圈的输出电压与铁芯的位移量有关。 铁芯在开始插入(x =0)或几乎离开线圈时的灵敏度,比铁芯插入线圈的1/2长度时的灵敏度小得多。这说明只有在线圈中段才有可能获得较高的灵敏度,并且有较好的线性特性。 1、工作原理 设线圈长度为l 、线圈的平均半径为r 、线圈的匝数为N 、衔铁进入线圈的长度la 、衔铁的半径为ra 、铁心的有效磁导率为μm ,则线圈的电感量L 与衔铁进入线圈的长度la 的关系可表示为 [] 2222 2)1(4a a m r l lr l N L -+=μπ 二.红外避障传感器避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。1.可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范考虑到发射光线是光,30cm以内,所以我们选择红外避障传感器安装在机器人上。围较近,大致为 2.红外避障传感器的优点: 1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光;(2)被动式工作,隐蔽性好,不易被干扰;()靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装(3 目标的能力优于可见光;)红外系统的体积小、质量轻、功耗低;(4 )不受电磁波的干扰、非噪声源、可实现非接触性测量。(5 红外避障传感器的不足: 3. 周围的光线都能导方向、由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、致较大的测量误差。工作原理: 4. )红外避障传感器:(1接收管接收这发射管发射一定频率的红外信号,具有一对红外信号发射与接收二极管,红外信号反射回来被接当传感器的检测方向遇到障碍物(反射面)时,种频率的红外信号,机器人即可利用红外波经过处理之后,通过数字传感器接口返回到机器人主机,收管接收,的返回信号来识别周围环境的变化。光学系统按结构不同可分为透射式红外线传感器包括光学系统、检测元件和转换电路。热敏元件应用最和反射式两类。检测元件按工作原理可分为热敏检测元件和光电检测元件。通过转换电路变成热敏电阻受到红外线辐射时温度升高,电阻发生变化,多的是热敏电阻。电信号输出。)热敏检测元件(2 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即)t0]Rt=Rt0[1+α(t-为温度系α(通常t0=0℃)时对应电阻值;Rt0Rt式中,为温度t时的阻值;为温度t0 数。半导体热敏电阻的阻值和温度关系为Rt=AeB/t 取决于半导体材料的结构的常数。B、A时的阻值;t为温度为Rt式中 (3)光电检测元件 光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。 光电导效应:在光线作用下,电子吸收光子能量从键合状态过渡到自由状态,而引起材料电导率的变化。当光照射到光电导体上时,若这个光电导体为本征半导体材料,且光辐射能量又足够强,光电材料价带上的电子将被激发到导带上去,使光导体的电导率变大。基于这种效应的光电器件有光敏电阻。 位移电涡流传感器测量电路设计-) ————————————————————————————————作者:————————————————————————————————日期: 成绩评定: 传感器技术 课程设计 题目位移电涡流传感器测量电路设计 摘要 电涡流传感器由于具有对介质不敏感、非接触的特点,广泛应用于对金属的位移检测中。为扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电路作为非线性补偿环节。利用Matlab计算软件辅助设计了直径为60mm电涡流传感器探头,并结合测量电路进行实验。实验结果表明最大测量范围接近90mm,验证了该系统工作的稳定性,证明设计达到了预期效果。关键词:电涡流传感器;测量电路;大位移;线性化 目录 一、设计目的------------------------- 1 二、设计任务与要求--------------------- 1 2.1设计任务 ----------------------- 1 2.2设计要求 ----------------------- 1 三、设计步骤及原理分析 ----------------- 1 3.1设计方法 ----------------------- 1 3.2设计步骤 ----------------------- 2 3.3设计原理分析 -------------------- 6 四、课程设计小结与体会 ----------------- 6 五、参考文献-------------------------- 6 一、设计目的 1.了解电涡流传感器测量位移的工作原理和特性。 2.了解电涡流传感器的前景及用途 二、设计任务与要求 2.1设计任务 扩大电涡流传感器的测量范围,采用恒频调幅式测量电路,引用指数运算电 路作为非线性补偿环节。验证了该系统工作的稳定性,证明设计达到了预期效果。 2.2设计要求 1. 工作在常温、常压、稳态、环境良好; 2. 设计传感器应用电路并画出电路图; 3. 应用范围:测量物体的位移。 三、设计步骤及原理分析 3.1设计方法 电涡流传感器具有体积小、非接触、对介质不敏感的特点,被广泛应用于对金属位移等的测量中。尽管用电涡流传感器非接触测量位移已经得到广泛的应用,但是测量位移的线性范围受到传感器线圈直径的限制,位移测量范围为线圈直径的1/3~1/5,大直径的传感器,其测量范围最大可以接近到直径的1/2。在许多领域希望能进一步扩大传感器的测量范围,以满足大位移的非接触测量。文中采用指数运算电路作为非线性补偿环节来改善传感器原有的传输特性,扩大传感器测量范围。 由电磁感应定律可知:闭合金属导体中的磁通发生变化时,就会在导体中产生闭合的感应电涡流,阻碍磁通量的变化。如图1所示,传感线圈由交流信号激励,在产生焦耳热的同时,又要产生磁滞损耗,它们造成交变磁场能量的损失,进而使传感器的等效阻抗Z发生变化。 影响阻抗Z的因素有被测导体的电导率、磁导率、线圈的激励频率f及传感器与被测导体间的位移x等,只要保证这些影响因素只有位移x变化,其他都保持 设计题(20分,每个10分) 1.依据已学知识设计一光纤位移传感器(要求画出框架图,并解释位移与输出信号的关系) 2.依据已学知识设计一种加速度传感器(要求画出结构图并注明所用的敏感元件) 3.用所学知识设计出一种压力传感器,说明他的工作原理? P103 图4.10 光纤测压传感器或者P151 图6.26 对中套管 光纤 厚的膜片 0.254 mm 膜片管 2 . 7 6 9 3 . 9 3 7 4 . 8 2 6 4.光纤干涉仪有较高的灵敏度,具有非常大的动态范围等优势。利用集成 电路技术和目前的电光技术起来,请画出集成的迈克尔逊(Michelson)干涉仪,并写出具体部件。 激光器光探测器3 dB耦合器 反射的光纤端面 换能器 5.依据已学知识设计一硒蒸发膜湿度传感器(标明电极) 图见书本P187 页 6.用热释电传感器设计一个热释电报警器? 7.CCD图像传感器的工作原理? 8.依据已学知识设计一容器内液体重量传感器 9.依据已学知识设计一种热释电传感器(要求画出结构图并注明所用的敏感元件) 10. 画出你所认知的一种光电式传感器,要求注明结构 如图是光电管 11. 设计微弯光纤传感器104页 12. 依据已学知识设计一种筒式压力传感器(要求画出结构图并注明所用的敏感元件) 13. 依据已学知识设计一应变式感器(要求画出结构图并注明所用的敏感元件) 补偿片 工作片 应变电阻1和4沉积在杆的凹面处 应变电阻2和3沉积在杆的凸面处 14.依据已学知识,设计一个用差动变压式加速度传感器来测量某测试台平台振动的加速度(只画出原理图) 15.依据所学知识,设计一种实现自相关检测传感器(只画出原理图) 16.依据已学知识设计一种零差法检测的光纤相位传感器(要求只画出框架图) 红外避障传感器 IMB standardization office【IMB 5AB- IMBK 08- IMB 2C】 二.红外避障传感器 1.避障传感器主要包括:超声波避障传感器,红外避障传感器,激光避障传感器等等。考虑到发射光线是光,可以希望在相当短的时间内获得较多的红外传感器测量值以及测距范围较近,大致为30cm以内,所以我们选择红外避障传感器安装在机器人上。 2.红外避障传感器的优点: (1)环境适应性好,在夜间和恶劣气象条件下的工作能力优于可见光; (2)被动式工作,隐蔽性好,不易被干扰; (3)靠目标和背景之间各部分的温度和发射率形成的红外辐射差进行探测,因而识别伪装目标的能力优于可见光; (4)红外系统的体积小、质量轻、功耗低; (5)不受电磁波的干扰、非噪声源、可实现非接触性测量。 3. 红外避障传感器的不足: 由于传感器测量光的差异,其受环境的影响非常大,物体的颜色、方向、周围的光线都能导致较大的测量误差。 4.工作原理: (1)红外避障传感器: 具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当传感器的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外波的返回信号来识别周围环境的变化。 红外线传感器包括光学系统、检测元件和转换电路。光学系统按结构不同可分为透射式和反射式两类。检测元件按工作原理可分为热敏检测元件和光电检测元件。热敏元件应用最多的是热敏电阻。热敏电阻受到红外线辐射时温度升高,电阻发生变化,通过转换电路变成电信号输出。 (2)热敏检测元件 热阻效应:物质的电阻率随温度变化的物理现象叫热阻效应。 金属热电阻的电阻值和温度一般可以用以下的近似关系式表示,即 Rt=Rt0[1+α(t-t0)] 式中,Rt为温度t时的阻值;Rt0为温度t0(通常t0=0℃)时对应电阻值;α为温度系数。 半导体热敏电阻的阻值和温度关系为 Rt=AeB/t 式中Rt为温度为t时的阻值;A、B取决于半导体材料的结构的常数。 (3)光电检测元件 光电效应:在高于某特定频率的电磁波照射下,某些物质内部的电子会被光子激发出来而形成电流,即光生电,分为外光电效应和内光电效应。 光电导效应:在光线作用下,电子吸收光子能量从键合状态过渡到自由状态,而引起材料电导率的变化。当光照射到光电导体上时,若这个光电导体为本征半导体材料,且光辐射能量又足够强,光电材料价带上的电子将被激发到导带上去,使光导体的电导率变大。基于这种效应的光电器件有光敏电阻。 (4)红外发射二极管的选择霍尔传感器转速测量电路设计
红外避障传感器测试结果
传感器与测控电路设计说明书
红外避障传感器
位移电涡流传感器测量电路设计-)
传感器设计和计算题
红外避障传感器