三菱FR-F700系列变频器PID控制参数设置及校正

三菱FR-F700系列变频器PID控制参数调节及校正
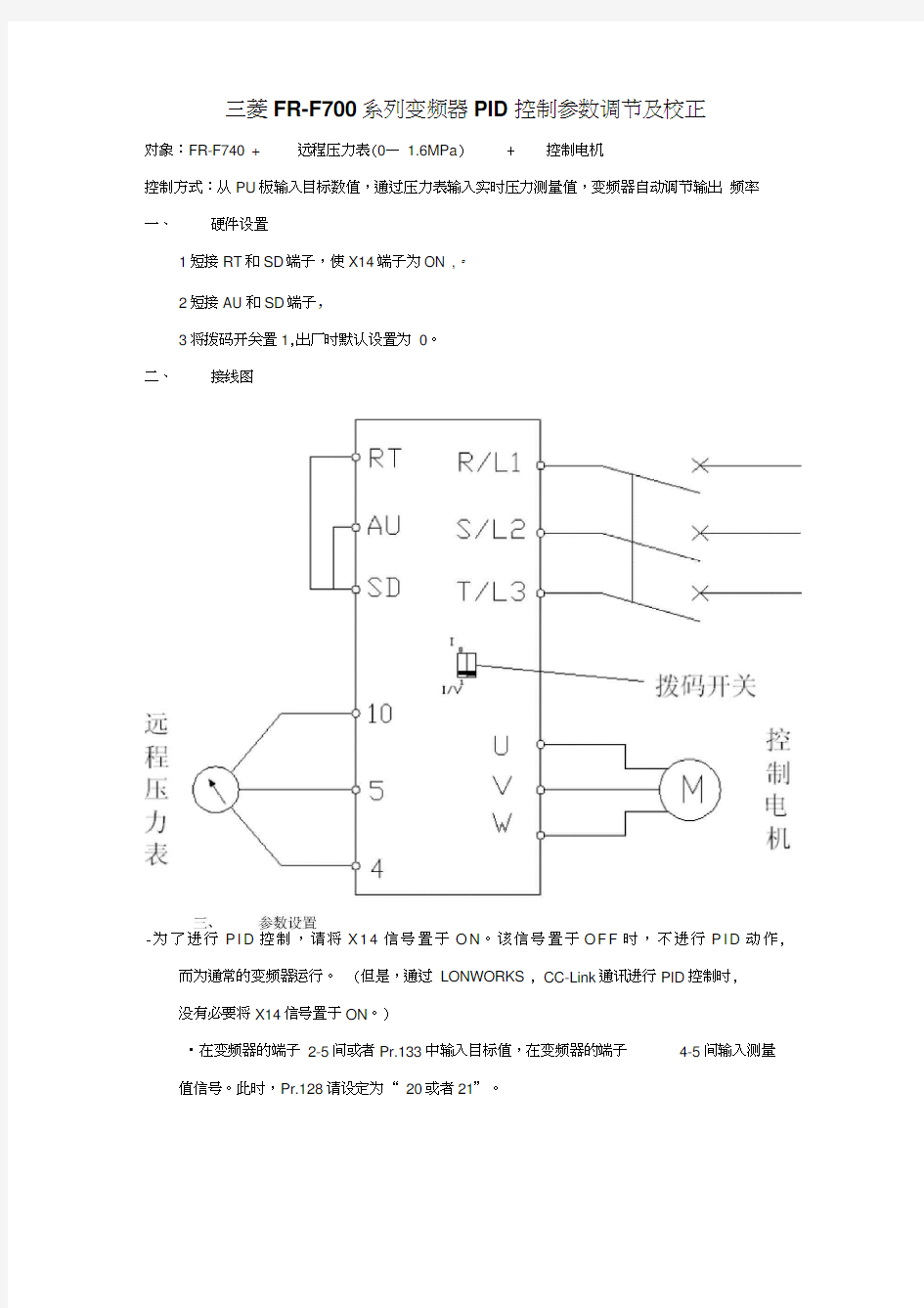
对象:FR-F740 + 远程压力表(0— 1.6MPa) + 控制电机
控制方式:从PU板输入目标数值,通过压力表输入实时压力测量值,变频器自动调节输出频率
一、硬件设置
1短接RT和SD端子,使X14端子为ON ,。
2短接AU和SD端子,
3将拨码开关置1,出厂时默认设置为0。
二、接线图
-为了进行PID控制,请将X14信号置于ON。该信号置于OFF时,不进行PID动作, 而为通常的变频器运行。(但是,通过LONWORKS , CC-Link通讯进行PID控制时,
没有必要将X14信号置于ON。)
?在变频器的端子2-5间或者Pr.133中输入目标值,在变频器的端子4-5间输入测量值信号。此时,Pr.128请设定为“ 20或者21”。
?输入在外部计算的偏差信号时,请在端子或者11”。
1-5间输入。此时,Pr.128请设定为“ 10
Pr.183= 14 (PID 控制选择)
Pr.267= 1或2 (4号端子输入电压选择,1时为0 —5VDC ; 2时为0—10VDC )
Pr.133=设定目标值(也可以从2号端子输入,详见说明书)
四、参数校正
将上述参数设置完成以后,保证RT端子和AU端子均和SD端子短接后,再进行参
数校正。将压力表值调节到OMPa,设置参数Pr.c6= 0;将压力表值调节到 1.6MPa,设
置参数Pr.c7= 100.这样,0 —100将和0— 1.6MPa等比例对应,目标值设定Pr.133中设定值(0 —100)与
0—1.6MPa等比例对应。
1调整步骤
调擅Pr. 127 Pr. 曲Pr. 575 Pr 577的PID疚制塞戲" 设定PID控制用前输入输出
端子Pr. 178- Pr. 189 输入塢子越能选择-Pr. 190 - Pr. 196 \输出端子功能选择」'
2详细校正过程
Pr .OOQQ
(1)------------------------------------------------------------------------------------------------------------ 按变频器PU板上的MODE键,调至参
数选择界面,如图: ------------------------------------------------------- ,
C ____
然后旋转旋钮使界面到Pr.C参数设置界面,如图:------------------ ,再按SET键进入
c ____
参数号选择界面,如图:----- --------- ,此时字母C后的光标闪烁。
(2)将压力表值调节到0MPa并保
持,然后旋转旋钮,当字母C后面数字为6 时停止旋转,并
按SET键确认,键入Pr.C6的参数设置界面,此时显示的值不一定为0, 旋转按钮是其值为0?并按下SET键
确认,确认成功后,屏幕在参数号和参数设置值之间交替闪烁。
(3)按MODE键回到参数号选择界面,
将压力表值调节到 1.6MPa并保持,旋转旋钮是字母
C后面的数值为7,按SET键进入Pr.C7的参数设置界面,此时显示的值不一定为100,旋转旋钮是其值为
100,并按下SET键确认,确认成功后,屏幕在参数号和参数设置值之间交替闪烁。
(4)按MODE键回到监视界面,开始运行。
3校正实例
(OrT 使用4mA 的传感器"50t :T 使用20mA 的传感器,通过PID 控制*将室潟调整到25?匚 目标值加在变频器的端子2-5间
< 0-5V ).)
—必穎校疋餓入目标设忑? 刑*传感潜輪出
(4吃临 时.fltj?行以下的
/― 姬 丿
“?目标值为50%对
诚灌劉目标值%冉城子.2 5间 織入电压”
端子2的规格为仍-QV, 100%-5V ?50賢足向煤子2WA2 5V 电怖.
通过势数单元运t 亍时,谄在Pr.133(ft 入冃标OltO-lOOW.
运柠时.博大暑初比侧范ffHPt 129),增卿分肘间^.130),耀分时闻 ("134》设蚤
"999萨 无功右?观券療统的持势的伺时,臧小比侧范囲
;Pr. 128),增疑积分时间(Pr.l30J .存应答迟爆的系统.1吏用徴分控制 (Pr134)tf 慢增犬.
Z
歩融调整 丿 *
/ 參艷前最楼化 丿
为使測定債梯定,增大比mm (Pr 129J ?增辰积井时间 ^r.130)?邮疽嫩分时阖
^r. 134)^
在搭个运行状侖下■淋定值萌定时. 可范圈Pr 桂卽?编短积 分时词<Pr 130)-博怅械分财间 (Pr. 134)?
( 谴整完毕 )
*必须校证时 通过校iFPr902yjlPr .903端于2」验者Pr . 904iyfiPr. 905谓子,讲行检沖器
情岀以及冃标泓定谕入的松正.
检正吝娈裁器停止中的PI 模式下ilt 亍.
V 目标值输入的校正〉
1?端子2-5间外加目标设定 0%的输入电压(例:0V )。
2. C2 ( Pr.902)的偏差为0%时,输入变频器必须输出的频率(例: 0Hz )。
3. C3 ( Pr.902)设定0%时的电压值。
4. 端子2-5间外加设定值设定100%的输入电压(例:5V )。
z
目様值的决定 丿
块屋想谐整的目标值.
1P
设定Pr. 1明,梅即斗借号直刊忆 能蒔进tiPID 控制
计算冃标值相当于慎电肅的 百分之JU
核匝罟观格
Or-W. 50亡一20皿时.4mA 为0V 21005.冃标債25它为50鶯
厂 运忏 丿
增大比制范ffl (Pr.129)?增长段 分时间(Pr. 1朗.籟分时间 ^r 1W 设置799旷无功能 '?启前倍号置刊亂
5. Pr.125的偏差为100%时,输入变频器必须输出的频率(例: 50Hz )。
6. C4 ( Pr.903)设定100%时的电压值。
v 传感器输出的校正〉
1?端子4-5间外加检测器设定 0%的输出电流(例:4mA )。 2?通过C6 (Pr.904)进行校正。
3?端子4-5间外加检测器设定的 100%的输出电流(例:20mA )。 4通过C7 (Pr.905)进行校正。 说明
1 以上参数设置完成,参数校正成功后,变频器断电再次启动后,无需重新设置和校 正参数。 2校正参数前,须保证 AU 端子和SD 端子短接,拨码开关置 1 (X14置ON ) ? 3
Pr.c6设置值对应4号端子输入的测量值的最小值, Pr.c7设置值
对应4号端子输入
的测量值的最大值,建议分别设置为 0和100.
4 Pr.128参数值设定PID 为负作用还是正作用,当在(目标值—测量值)为正时增加
执行量(输出频率),为负时减小执行量时为负作用, Pr.128设定为20;当(目标 值-测量值)为负时增加执行量,为正时减小执行量,选择正作用,
Pr.128设置为
21. 5
Pr.133中设定值为当前测量值占最大测量值的百分数。 如上
所设,0 — 1.6MPa 在Pr.c6
和Pr.c7设定对应0— 100,则,若想在压力超过 0.8MPa 时电机减速(变频器频率 输出减小),此时0.8MPa (占1.6的50%)对应0 — 100中的50,则Pr.133设置为 50.
附录
变频器能够进行流量,风量或者压力等的过程控制。
由端子 2 输入信号或参数设定值作为目标和端子 4 输入信号作为反馈量组成 PID 控制 的反馈系统。
五、
六、
反匾信号<测定值) 6;比倒常数Tix 积分时问S :运翼Id ;灘分时间
-Pr. 128 = “2S 21 ** 1 测定值输入)
(1) PID 动作概要
*Pr. 12S = 7 11” :偏差值信号输入丿
日标伯
倚芟倍号
------ -z-——
S¥i; DC0-±1CV L_ (0 - ■ 5V) PID 运聘 T7xs +TdXS ①PI动作 PI动作泉由比例动作(P)和积分动作(I)组合成的,根据偏基大小及时间变化产生一个执行星。 [测莘值阶跌变化时的例子] 注:PI动作是P和I动作之和 ②PD动作 PD动作是由比例动作(P)和微分动作(D)组合成的.根据改变动态特性的偏差速率产生一个执行星.改善动态特性. [测罕值按比例变化时的例子] 注:PD动作是P和D动作之和 ③P ID动作 PID动作是将PI动作和PD动作组合后的动作功能.可以实现充分吸取各项动作长处后的控制. 注:PID动作是P和I及D动作的总和 偏差目标値 P动作 1动作 PI动作 时间 时间 时间 时间 ④负作用 当偏差x=(目标值一测定值)为正时?增加执行星(输岀频率).如果偏差为负,则减小执行星 (有履气时 目标值冷一大 痰f小 反馈信号 (测定 值) ⑤正作用 当偏差X (目标值一测定值)为负时.增加执行虽(输岀频率八 (有冷气时' 目标值-------- K〕一 反馈信号 (测定值)X>0 X<0 热f大 偏差与执行星(偷岀频率)之间的关系 偏差 正负负作用71 正作用¥ 腮1曲 A 200/220V 50/&0H; > *1履带沏肅規槁迭择电源 *2 输出信号确子根遐珂' 190 Pr. T9& £軸宙站子送择 ' 设定不同南不同 *3 输入信号遍子根? Pr. 17S -Pr. W 離入琴子选择设定不同而车同 (2) PID 自动切换控制(Pr.127 ) -为了加快运行开始时的系统的启动,可以仅在起动时以通常运行模式启动。 -Pr.127 PID 控制自动切换频率在 0?400Hz 的范围内设定频率,从启动到到达 Pr.127,以通常运 行转为启动,PID 控制运行。变为PID 控制运行后,即使输出频率在 Pr.127以下, 也继续PID 控制。 (3) PID 输出中断功能(SLEEP 功能)(SLEEP 信号,Pr.575?Pr.577 ) -PID 运算后的输出频率未满 Pr.576输出中断检测水平 的状态如果持续到 Pr.575输出中断检测 时间 所设定的时间以上时,中断变频器的运行。能够减少在效率低的低速运行下 的能源消耗。 ⑶接线图 ?诵型逻辎 ? Pr. 12S =20 , Pr 183 =14 ? Pt. 191 =47 ? Pr. =16 ? Pr. 193 —14 ? Pi 194 =15 ---------- F f i ST ST RT0(14)4 算 冲10 设运器 :■用干目标價的段定、 42 ID) SU Af PID 功作中 酸型 的tw 姫(FLP ) FU —上限 -2 {fBKi 0L —下限 f 正转点转)\ 向鱸出, v JiLlIPF^—* $E 帅出倍号妙共塢子 {测定?)4-20rM — 傲型 再盡 的悄况 ?用+ ■ [| ■ 111 I 4 I :OUD(CCM)I24V) -J I I ■I I — P 饰出頻率 -PID输出中断功能动作中,偏差(=目标值—测量值)到达PID输出断路解除水平(Pr.577设定值-1000% )后,解除PID输出中断功能,自动重新开始PID控制运行。 -PID输出中断功能动作中,输出PID输出中断中信号(SLEEP)。此时,变频器运行中信号(RUN ) 置于OFF , PID控制动作中信号(PID )置于ON。 相辰动作时(Pr. 12B-10 (4)PID监视功能 ?可以将PID控制目标值,测定值,偏差值输出到操作面板的监视器显示及端子CA , AM。 ?偏差监视器能够负极显示,将1000作为0%。(偏差监视器不能从端子CA , AM输出。) ?各监视项目请在Pr.52 DU/PU主显示数据选择,Pr.54 CA端子功能选择,Pr.158 AM端子功能选