常用的机构观察与运动分析
常用的机构观察与运动分析
一、实验目的
1、掌握平面运动副的分类及其表示方法;
2、结合实例加深理解平面连杆机构的基本类型、判别及其演化;
3、熟悉凸轮机构的分类、间歇机构的工作原理、螺旋机构的结构特点;
4、熟悉齿轮传动机构的类型及其特点。
二、实验设备及工具
1、机械原理陈列柜;
2、各种机构实物模型。
三、实验内容
1、平面运动副类型及其常用符号
(1)转动副,如图1所示。
(a)全为活动构件时
(b)构件1为机架时
图1 转动副
(2)移动副,如图2所示。
(a)全为活动构件时
(b)构件1为机架时
图2 移动副
(3)高副,如图3所示。
(a)全为活动构件时
(b)构件1为机架时
图3 高副
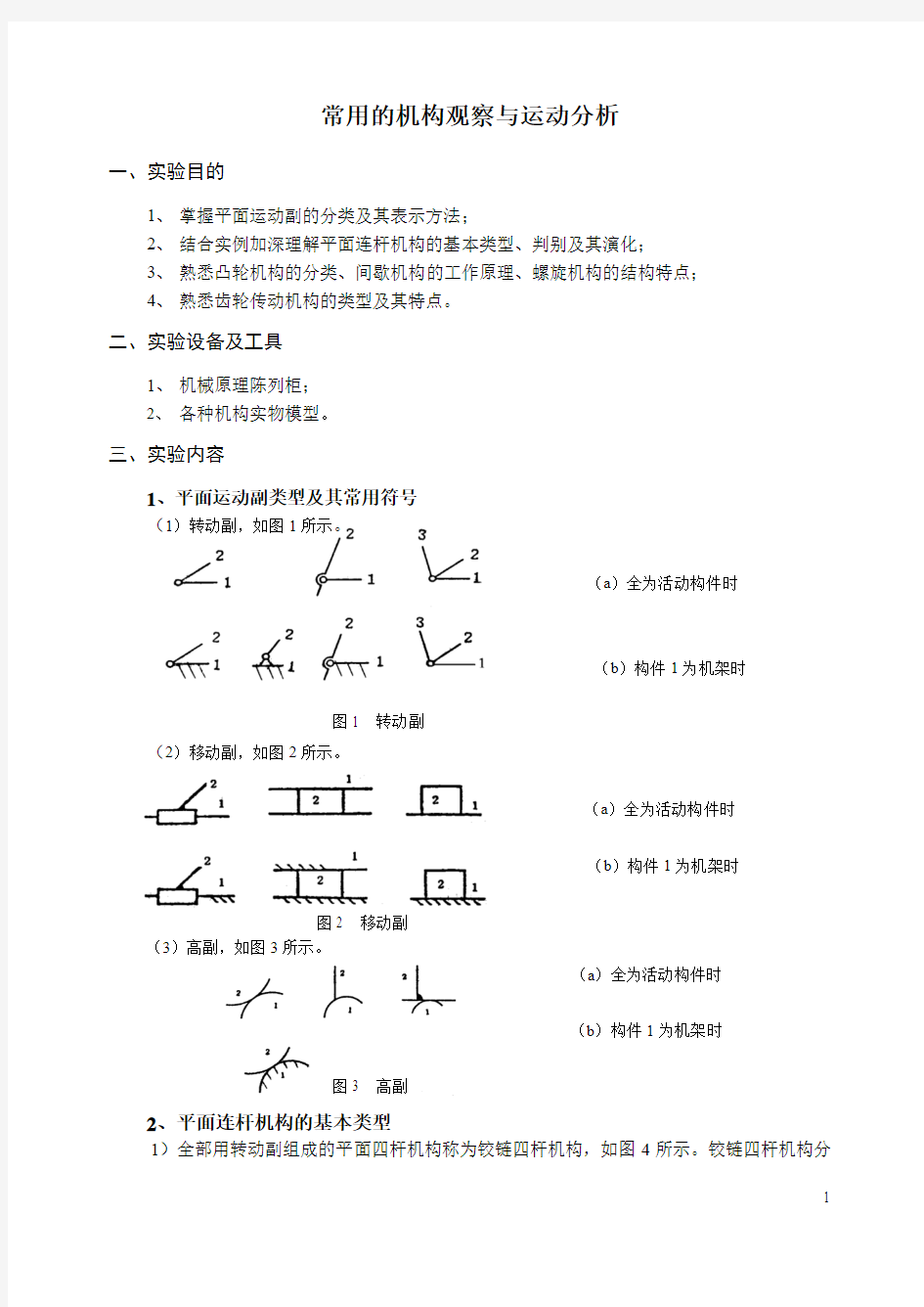
2、平面连杆机构的基本类型
1)全部用转动副组成的平面四杆机构称为铰链四杆机构,如图4所示。铰链四杆机构分
为三种基本型式:曲柄摇杆机构(如图4a 、b )、双曲柄机构(如图4c )和双摇杆机构(如图4d )。
c
d
图4 变更机架后机构的演化
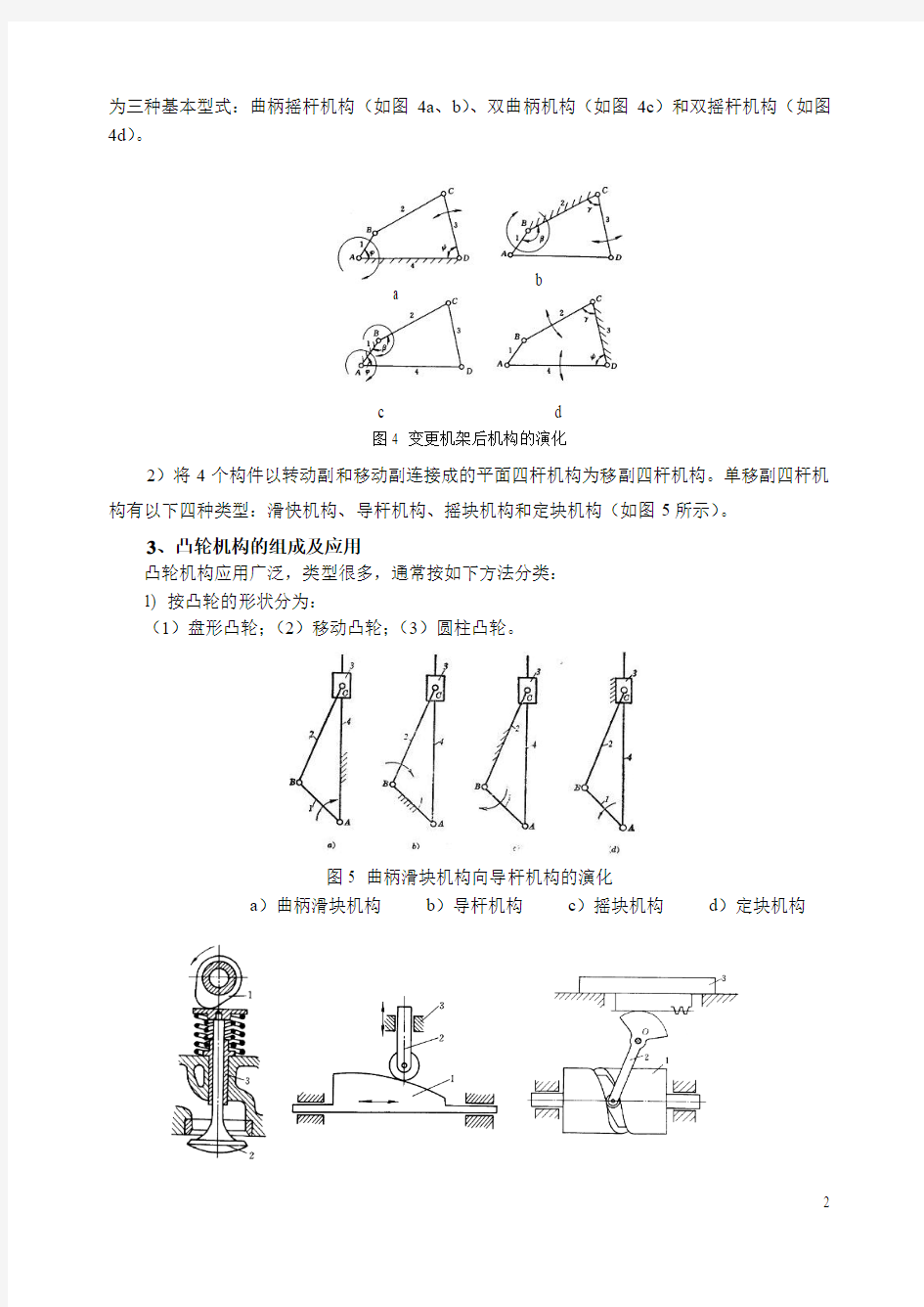
2)将4个构件以转动副和移动副连接成的平面四杆机构为移副四杆机构。单移副四杆机构有以下四种类型:滑快机构、导杆机构、摇块机构和定块机构(如图5所示)。
3、凸轮机构的组成及应用
凸轮机构应用广泛,类型很多,通常按如下方法分类: 1) 按凸轮的形状分为:
(1)盘形凸轮;(2)移动凸轮;(3)圆柱凸轮。
图5 曲柄滑块机构向导杆机构的演化
a )曲柄滑块机构
b )导杆机构
c )摇块机构
d )定块机构
a
b
图6 内燃机气门机构图图7移动凸轮图8 自动车床进刀机构中的凸轮
2)按从动件末端形状分为:
(1)尖顶从动件如图9a、d所示;(2)滚子从动件如图9b、e所示;(3)平底从动件如图9c、f 所示。
a b c d e f
图9 从动件末端形状
4、间歇机构的工作原理
常见的间歇运动机构有:棘轮机构、槽轮机构等。
1)棘轮机构主要由棘轮、棘爪和机架组成(如图10所示)。
图10 棘轮机构图11 槽轮机构
2)槽轮机构主要由带圆销的主动拨盘,带径向槽的从动槽轮和机架组成(如图11所示)。
5、螺旋机构
螺旋机构由螺杆、螺母和机架组成(如图12所示)。
图12 螺旋机构
6、齿轮机构
齿轮机构由主动齿轮、从动齿轮和机架组成。
图13 齿轮机构的主要类型
齿轮传动的类型很多,按照两齿轮的轴线位置、齿向和啮合情况的不同,齿轮传动可以分类如下:
外啮合(图a)
直齿传动内啮合(图b)
齿轮齿条(图c)
两轴平行—-圆柱齿轮传动斜齿圆柱齿轮传动(图d)
人字齿轮传动(图e)
齿轮传动直齿锥齿轮传动(图f)
两轴相交的齿轮传动
(圆锥齿轮传动)曲齿锥齿轮传动(图g)
两轴不平行
斜齿交错齿轮传动(图h)
两轴交错的齿轮传动
蜗杆蜗轮传动(图i)
四、实验报告实验名称:常用的机构观察与运动分析
班级姓名实验日期
一、吊扇的扇叶与吊架、书桌的桌身与抽斗、机车直线运动时的车轮与路轨,各组成哪一类运动副?并分别用运动副符号表示。
二、试列举出在实验中观察到的三个平面四杆机构实例名称和功用、并用机构运动简图表示。
三、试说明凸轮机构、间歇运动机构、螺旋机构、齿轮机构的结构特点和功能。
五、思考题:
1、两构件组成的转动副、移动副和高副时,各限制了哪些运动,保留了哪些运动?
2、铰链四杆机构有哪几种类型?怎样判别?各类型功能有什么区别?
3、单移副四杆机构有几种类型?怎样判别?各类型功能有什么区别?
4、解释机构中的下列名词:(1)曲柄、(2)摇杆、(3)滑块、(4)导杆。
5、比较连杆机构和凸轮机构的优缺点。
6、从结构和可靠性两方面,比较力锁合和几何锁合凸轮机构。
7、食品罐头的螺旋盖为什么采用多线、小螺距的螺纹?
8、棘轮机构和槽轮机构如何从结构上实现间歇运动?
9、两轴平行、两轴相交、两轴交错间的传动各可采用哪些齿轮传动?
平面四杆机构的运动仿真模型分析
平面四杆机构的运动仿真模型分析 1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 2.1问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
2.2平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。 如E点轨迹不符合设计要求,则可适当调整各杆件的尺寸,再通过尺寸动画功能检验。
轿车后背门铰链机构的运动分析及修改设计
天津汽车 摘要 通过ADAMS建模对某轿车后背门开启机构做 运动分析,来解决后背门初开启阶段的干涉问题和完全开启时的漏雨问题。通过ADAMS的优化分析和运动分析,给出了解决问题的建议:调整相关点位置可以改善后背门与侧围的干涉现象,而且最佳的办法是将铰链机构整体前移;调整相关点位置或修改限位块尺寸可以改善后备门开启角度过大及行李箱漏雨的问题。 CAE在汽车工程中的效率和价值都得到了具体体现。 关键词 后背门铰链结构 运动分析 DOE AnalysisandDesignofPassengerCarBackDoorHinge Abstract:Theoperationmovementofopeningmechanismofcarbackdoorisanalyzedbybuildingamodelwith ADAMS,improvingtheinterferencebetweenbackdoorandsidepanelwhenbackdoorisopeningatthebeginningandresolvingleakrainproblemwhenbackdoorisinfull-sizeopening.SomesuggestionsareofferedaftertheoptimizationanalysisandoperationmovementanalysisarebothfinishedwithADAMS.Adjustingthepositionofrelativepointcanimprovetheinterferencebetweenbackdoorandsidepanel,furthermorethebestwayofadjustingistomovethewholehingemechanismforwardC adjustingthepositionofrelativepointandredesigninglimitingblockcanalsoimprovetheopeningangleofbackdoorandresolvetheproblemofleakrain.ThevalueandefficiencyofCAEinautomotiveengineeringisclearlypresentedinthispaper.Keywords:Hingemechanismofbackdoor OperationmovementanalysisDOE 张德超 杨亚娟 刘红领 陈伟 柳杨 (奇瑞汽车有限公司乘用车工程研究院CAE部) 车门是车身上重要部件之一,按其开启方式分 为顺开式、逆开式、水平移动式、上掀式和折叠式等几种。 轿车后背门主要有2种设计方案:第1种方案是典型两厢车的后备门,将后窗玻璃与后背门做成一个整体,也称掀背门,这种设计方案在三厢车及轻型货车等车型中也有广泛应用;另一种方案是将后窗玻璃与后背门做成分离的,其中后窗玻璃与车身是一个整体,2种方案的选择主要根据车身造型及布置来决定。 某轿车的后背门总成如图1所示。开启机构是由1个四连杆和1个气弹簧构成,如图2,左右两侧对称布置。在试制车间装车时,发现有2个问题,第 1个问题是后背门在初始开启阶段会与侧围发生干 涉,会损坏车身油漆;第2个问题是后背门完全打 开的时候,会有雨水漏入行李厢。 解决这2个问题最直接的办法是修改侧围的模具,但是修改量很大,成本很高,下面通过平面四连杆机构的运动分析,来解决这2个问题。 图1 后背门总成 图2 后背门开启机构轿车后背门铰链机构的运动分析及修改设计 !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!" !!" !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!" !!" 汽车技术
四连杆机构运动学分析——张海涛
四连杆机构运动学分析 使用ADAMS 建立如图1所示的四连杆机构,二杆长150mm ,三杆长500mm ,四杆长450mm ,二杆的转动速度为πrad/s ,二杆初始角度为90度。用Matlab 建立该系统的运动约束方程,计算结果,并与ADAMS 仿真结果进行对比。 图1 四杆机构 一、位置分析 1、由地面约束得到: {R x 1=0 R y 1=0θ1=0 2、由O 点约束得: { R x 2?l 22cos θ2=0R y 2?l 22 sin θ2=0 二杆 三杆 四杆 O 点 A 点 B 点 C 点
3、由A 点约束得: { R x 2+l 22cos θ2?R x 3+l 32cos θ3=0R y 2+l 22sin θ2?R y 3+l 32 sin θ3=0 4、由B 点约束得: { R x 3+l 32cos θ3?R x 4+l 42cos θ4=0R y 3+l 32sin θ3?R y 4+l 42 sin θ4=0 5、由C 点约束得: { R x 4+l 4cos θ4?l 5cos θ1=0R y 4+l 42 sin θ4?l 5sin θ1=0 6、由二杆驱动约束得: θ2?ω2=0 积分得: θ2?θ02?ω2t =0 由上面九个方程组成此机构的运动约束方程,用Matlab 表示为: fx=@(x)([x(1); x(2); x(3); x(4)-l2/2*cos(x(6)); x(5)-l2/2*sin(x(6)); x(4)+l2/2*cos(x(6))-x(7)+l3/2*cos(x(9)); x(5)+l2/2*sin(x(6))-x(8)+l3/2*sin(x(9)); x(7)+l3/2*cos(x(9))-x(10)+l4/2*cos(x(12)); x(8)+l3/2*sin(x(9))-x(11)+l4/2*sin(x(12)); x(10)+l4/2*cos(x(12))-x(1)-l5; x(11)+l4/2*sin(x(12))-x(2); x(6)-w*i-zhj0;]); x(1) x(2) x(3) x(4) x(5) x(6) x(7) x(8) x(9) x(10) x(11) x(12) 分别表示R x 1、R y 1、θ1、R x 2、R y 2、θ2、R x 3、R y 3、θ3、R x 4、R y 4、θ4。
平面机构的运动分析答案
1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有 6 个速度瞬心,其中 3 个是绝对瞬心。 8.速度比例尺μ ν 表示图上每单位长度所代表的速度大小,单位为: (m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为 (m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij P直接标注在图上)。 P 24)
12 三、 在图a 所示的四杆机构中, l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小; 3)当v C =0时,φ角之值(有两个解); 解:1)以选定的比例尺μl 作机构运动简图(图b )。 2)求v C ,定出瞬心P 13的位置(图b ) a ) (P 13) P P 23→∞
四连杆机运动学分析
栏杆机四杆机构运动学分析 1 四杆机构运动学分析 1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 三台设备测绘数据分别如下: 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 图1-1 II-1型栏杆机机构测绘及其运动位置图
(新)机构运动简图测绘与分析实验
实验一机构运动简图测绘与分析实验 一、实验目的 1.根据机构模型,掌握正确绘制平面机构运动简图的方法和技能。 2.验证和巩固机构自由度的计算,进一步理解机构自由度的概念。 3.应用机构自由度的计算方法,分析平面机构运动的确定性。 4.掌握平面机构的组成原理,能够对平面机构进行结构分析。 二、实验设备 1、机构模型(铆钉机构B1、简易冲床B 2、装订机机构B 3、鄂式破碎机B 4、步进输送机B 5、假肢膝关节机构B 6、机械手腕部机构B 7、抛光机B 8、牛头刨床B 9、制动机构B10等); 2.所用工具:钢板尺、游标卡尺、三角板、铅笔、圆规、橡皮、纸(除钢板尺和游标卡尺外,其余学生自备)。 三、实验内容 1. 选择5种机构模型进行测量,绘制机构运动简图; 2. 计算机构自由度,并注明其活动构件数、低副数、高副数,然后代入公式进行计算。 3.对所选择的机构进行结构分析,确定机构的级别。 四、实验原理、方法和手段 在对现有机械设备进行分析或设计新的机械设备时,都需要运用其机构运动简图。而机构各部分的运动是由其原动件的运动规律、该机构中各运动副的数目、类型,运动副相对位置和构件的数目来确定的,而与构件的外形、断面尺寸、组成构件的零件数目及运动副的具体构造等无关。所以,只要根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,就可以用运动副的代表符号和简单的线条把机构的运动简图画出来。
常用符号见下表: 1、机构运动简图的概念 抛开构件的复杂外形和运动副的具体结构,利用简单的线条和规定的符号来代表每一个构件和运动副,并按一定的比例将机构的运动特征表达出来的简单图形称为机构运动简图。机构运动简图与原机构具有完全相同的运动特性,因而可以根据该图对机构进行运动分析和动力分析。 2、测绘方法 (1)分析运动情况。绘制机构运动简图时,首先要把该机器或模型的实际构造和运动情况搞清楚。为此,先应确定出原动件和从动件,再使被测机器或模型缓慢运动,然后按照运动的传递路线,把原动件和从动件之间的各构件的运动情况观察清楚,尤其应注意有微小
常用的机构观察与运动分析
常用的机构观察与运动分析 一、实验目的 1、掌握平面运动副的分类及其表示方法; 2、结合实例加深理解平面连杆机构的基本类型、判别及其演化; 3、熟悉凸轮机构的分类、间歇机构的工作原理、螺旋机构的结构特点; 4、熟悉齿轮传动机构的类型及其特点。 二、实验设备及工具 1、机械原理陈列柜; 2、各种机构实物模型。 三、实验内容 1、平面运动副类型及其常用符号 (1)转动副,如图1所示。 (a)全为活动构件时 (b)构件1为机架时 图1 转动副 (2)移动副,如图2所示。 (a)全为活动构件时 (b)构件1为机架时 图2 移动副 (3)高副,如图3所示。 (a)全为活动构件时 (b)构件1为机架时 图3 高副 2、平面连杆机构的基本类型 1)全部用转动副组成的平面四杆机构称为铰链四杆机构,如图4所示。铰链四杆机构分
为三种基本型式:曲柄摇杆机构(如图4a 、b )、双曲柄机构(如图4c )和双摇杆机构(如图4d )。 c d 图4 变更机架后机构的演化 2)将4个构件以转动副和移动副连接成的平面四杆机构为移副四杆机构。单移副四杆机构有以下四种类型:滑快机构、导杆机构、摇块机构和定块机构(如图5所示)。 3、凸轮机构的组成及应用 凸轮机构应用广泛,类型很多,通常按如下方法分类: 1) 按凸轮的形状分为: (1)盘形凸轮;(2)移动凸轮;(3)圆柱凸轮。 图5 曲柄滑块机构向导杆机构的演化 a )曲柄滑块机构 b )导杆机构 c )摇块机构 d )定块机构 a b
图6 内燃机气门机构图图7移动凸轮图8 自动车床进刀机构中的凸轮 2)按从动件末端形状分为: (1)尖顶从动件如图9a、d所示;(2)滚子从动件如图9b、e所示;(3)平底从动件如图9c、f 所示。 a b c d e f 图9 从动件末端形状 4、间歇机构的工作原理 常见的间歇运动机构有:棘轮机构、槽轮机构等。 1)棘轮机构主要由棘轮、棘爪和机架组成(如图10所示)。 图10 棘轮机构图11 槽轮机构 2)槽轮机构主要由带圆销的主动拨盘,带径向槽的从动槽轮和机架组成(如图11所示)。 5、螺旋机构 螺旋机构由螺杆、螺母和机架组成(如图12所示)。 图12 螺旋机构 6、齿轮机构
最新并联机构运动学能分析与优化动力学
并联机构运动学能分析与优化动力学
分类号:TH113.2+2 密级:公开 U D C:单位代码:10424 工程硕士学位论文 4-UPS-RPS并联机构运动学性能 分析与优化 孙先洋 申请学位级别:硕士学位领域名称:机械工程 指导教师姓名:陈修龙职称:副教授 副指导教师姓名:朱苏宁职称:高级工程师 山东科技大学 二零一三年五月
论文题目: 4-UPS-RPS并联机构运动学性能分析与优化 作者姓名:孙先洋入学时间:2011年9月 领域名称:机械工程研究方向:先进设计与制造技术 指导教师:陈修龙职称:副教授 副指导教师:朱苏宁职称:高级工程师 论文提交日期:2013年5月 论文答辩日期:2013年6月8日 授予学位日期:
KINEMATICS PERFORMANCE ANALYSIS AND OPTIMIZATION OF 4-UPS-RPS PMT A Dissertation submitted in fulfillment of the requirements of the degree of MASTER OF ENGINEERING from Shandong University of Science and Technology by Sun Xianyang Supervisor: Associate Professor Chen Xiulong College of Mechanical and Electronic Engineering May 2013
声明 本人呈交给山东科技大学的这篇工程硕士学位论文,除了所列参考文献和世所公认的文献外,全部是本人在导师指导下的研究成果。该论文资料尚没有呈交于其它任何学术机关作鉴定。 硕士生签名: 日期: AFFIRMATION I declare that this dissertation, submitted in fulfillment of the requirements for the award of Master of Engineering in Shandong University of Science and Technology, is wholly my own work unless referenced of acknowledge. The document has not been submitted for qualification at any other academic institute. Signature: Date:
公交车门运动机构原理分析及模型制作
公交车门运动机构原理分析及模型制作 集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-
公交车门运动机构原理分析及模型制作 材料科学与工程学院2011级卓越一班第2小组 组员:朱富慧、王文霞、徐潇、 赵洪阳 目录 一、车门机构数据采集 本组主要了解了k52路公交的车门构造,通过拍摄细节照片和录制视频收集数据,并分析其运动原理和利用solidworks软件制作其模型(该过程在保证机构正常运动前提下,仅做了少部分简化和优化,最大程度保持拟实性与美观性)。收集到的资料(视频资料参见附件)如下:
二、机构运动原理分析 车门运动机构简图 该运动机构包括5个构件,1、5为机架,2、3为杆件,4为滑块。 4个低副:3个转动副O 1、O 2 、O 3 和一个移动副。 自由度F=3n-2P L -P H =3×3-2×4-0=1,自由度为1,有确定的运动。 三、装配分析 该机构中,1、5为机架,连接在车体上; 杆件2:柱子、柱子扣、连杆组成的整体; 杆件3:车门; O 1 :机构与动力系统连接形成的转动副; O 2 :连杆与门连接形成的转动副; O 3 :门与滑块4连接形成的转动副。 四、运动过程分析 开门时,动力系统通过转动副O 1使杆件2顺时针转动,杆件2通过转动副O 2 及杆件3 (门)带动滑块向两侧滑动同时在O 3 作用下使之逆时针旋转。关门与开门工程相反。 五、装配效果图(另可参见附件2) 六、装配效果动画展示 参见附件3.
七、部分零件模型(另可参见附件2) 八、成果与收获 在本次公交车门运动机构原理分析及模型制作的协作中,我们实地收集资料、分析原理、制作模型,并成功利用模型模拟了车门机构的运动。从中我们也遇到许多配合和尺寸方面的问题,提升了综合分析问题的能力,对机构运动原理也有了更为深刻的认识。
门机构运动仿真分析技术研究
门机构运动仿真分析技术研究 作者:上海飞机制造有限公司庞微卢鹄来源:航空制造技术 一架飞机有大小十几个舱门,包含登机门、服务门、货舱门、应急门等。舱门结构设计复杂,连杆、铰链数量众多,机构运动过程多阶段,运动关系复杂多变。由于舱门上的机构运动关系复杂,如何将这些舱门安装到位一直是飞机装配的一个难点。为了理清舱门各个机构运动的原理,指导现场工艺人员更好地进行工艺分析,采用CATIA的DMU模块对舱门进行运动机构仿真分析[1]。通过虚拟仿真技术的研究应用,验证舱门机构运动,找出机构中的可调节量,能指导工人现场安装调试,确保安装的顺利进行,缩短研制及安装周期[2]。 民用飞机舱门结构特点分析 民用飞机舱门:指民用飞机上带铰链机构,供人员进出或作为舱段主要维护通道的开口。完整的舱门包含的主要功能有:开关功能、应急开启功能、安全性功能、滑体预位功能、指示功能、辅助功能等。 民用飞机舱门结构一般采用金属材料。由于结构厚度较高,没有内蒙皮,采用连接角片连接横纵梁,采用预变形设计,飞行中正常飞行压差下为30% 压缩量,以保证良好的密封性能。 舱门结构方式主要有2种:外翻式打开方式与抛放式打开方式。外翻式,如ARJ的货舱门、大客的应急门等,重力方向与舱门运动方向一致;抛放式主要为ARJ的应急门、大客的登机门等,舱门提升后与机身平行沿航向前方打开,各位置垂直提升高度有所不同。 舱门的开启过程一般分为3个阶段:首先是对舱门进行解锁;然后对开启手柄进行提升;最后是将门推开的过程。在整个过程中包含的主要机构有:提升机构、导向机构、平移机构、内手柄及齿轮盒、外手柄机构、扭矩杆机构、阵风锁机构、外伸机构、增压预防、内外手柄机构、滑梯启动机构、驱动机构等。 舱门机构的简化 机构由若干个相互联接起来的构件组成。机构中两构件之间直接接触并能作相对运动的可
公交车门运动机构原理分析及模型制作
公交车门运动机构原理分析及模型制作 文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-
公交车门运动机构原理分析及模型制作 材料科学与工程学院2011级卓越一班第2小组 组员:朱富慧、王文霞、徐潇、 赵洪阳 目录 一、车门机构数据采集 本组主要了解了k52路公交的车门构造,通过拍摄细节照片和录制视频收集数据,并分析其运动原理和利用solidworks软件制作其模型(该过程在保证机构正常运动前提下,仅做了少部分简化和优化,最大程度保持拟实性与美观性)。收集到的资料(视频资料参见附件)如下:
二、机构运动原理分析 车门运动机构简图 该运动机构包括5个构件, 1、5为机架,2、3为杆件,4为滑块。 4个低副:3个转动副O 1、O 2 、O 3 和一个移动副。 自由度F=3n-2P L -P H =3×3-2×4-0=1,自由度为1,有确定的运动。 三、装配分析 该机构中,1、5为机架,连接在车体上; 杆件2:柱子、柱子扣、连杆组成的整体; 杆件3:车门; O 1 :机构与动力系统连接形成的转动副; O 2 :连杆与门连接形成的转动副; O 3 :门与滑块4连接形成的转动副。 四、运动过程分析 开门时,动力系统通过转动副O 1使杆件2顺时针转动,杆件2通过转动副O 2 及杆件3 (门)带动滑块向两侧滑动同时在O 3 作用下使之逆时针旋转。关门与开门工程相反。 五、装配效果图(另可参见附件2) 六、装配效果动画展示 参见附件3.
七、部分零件模型(另可参见附件2) 八、成果与收获 在本次公交车门运动机构原理分析及模型制作的协作中,我们实地收集资料、分析原理、制作模型,并成功利用模型模拟了车门机构的运动。从中我们也遇到许多配合和尺寸方面的问题,提升了综合分析问题的能力,对机构运动原理也有了更为深刻的认识。
四种门机构的运动分析
四种门机构的运动分析 Student:XXX Course: 工程概论 Instructor: XXX Date:201X年X月Course Paper Grade 201X
摘要:门机构为生产生活中一种广泛应用的装置。门是分割有限空间的一种实体,作用是连接和关闭两个或多个空间的出入口①。在不同场合中,为适应不同生产生活的需要,门机构演变出诸多类型,分别具有不同的原理和功能。本文对生产生活中四种常见门机构——推拉门、卷帘门、旋转门、伸缩门等的工作和运动机制进行了详尽而深入的分析。 关键词:门机构;机械原理;运动分析 Motion Analysis ofFourKinds of Mechanical Structure ofDoors Anonymous (XXXUniversity,Chengdu 61XXXX,China) Abstract: Mechanical structures ofdoorsarewidely useddevices installed at the entrance of structurefor production and living. Door is a kind of entity and segmentation oflimited space. Its function is to connect or shutthe entrance oftwo or more spaces. On different occasions, in order to adapt to theneeds of production and living, mechanical structures ofdoors have developed intomany types, each with different principles and functions. This article looks through fourkinds of common door structure in production and living--sliding door, rolling door, revolving door, retractable doorand analyzestheir motion mechanism. Keywords:Mechanical structures ofdoors; Principle of machinery; Motion analysis 1 Net: 门(汉语汉字), 2016年2月18日 https://www.360docs.net/doc/139071694.html,/subview/13543/7943569.htm#viewPageContent
实验一机构运动简图的测绘及分析
实验一机构运动简图的测绘及分析 一、实验目的: 1、掌握机构运动简图测绘的基本方法; 2、巩固机构自由度的计算。并验证机构具有确定运动的条件; 3、通过对机构进行结构分析,了解结构的组成原理 二、设备和工具 机器和机构模型量具铅笔橡皮和草稿纸 三、实验原理 机构运动与机构中的构件的数目、构件组成运动副的形式以及各运动副的相对位置有关,而与构件的复杂外形和运动副的具体结构无关,因此,在工程上对 机构进行结构分析、运动分析和力分析时可以用机构运动简图来进行。 机构运动简图既简单又能正确地反映一部机器的运动特征,因此,正确地测量和绘制机构运动简图是机械设计的重要组成部分、 四、实验方法与步骤 1、观察机构的运动,弄清构件的数目 缓慢移动被测的及其或机构模型,从原动件开始,根据运动传递路线,仔细观察相连接的两构件是否有相对运动,特别要注意那些运动很微小的构件,从而弄清楚组成机构的构件数目。 2、判别运动副类型 一般,从原动件开始,遵循运动传递的顺序,仔细观察各相邻构件之间的相对运动性质。由此确定机构中运动副的类型、数目 3、合理选择视图 一般选择与机构的多数构件运动平面平行的平面作为投影面。必要时也可以
就机构的不同部分选择两个或者两个以上的投影面,然后展开到一张图面上。或者把主运动简图上难于表示清楚的部分,另绘一张局部简图。 对于齿轮机构则可选择与运动平面相垂直的平面作为投影面。总之,以简单清楚的把机构的运动情况表示出来为原则。 4、画出机构运动简图的草图,计算机构的自由度。 将原动件转到某一位置(即可看清多数活动构件和运动副的位置)。在草稿纸上按照规定的符号,目测尺寸使实物与图形大致成比例,徒手画出机构运动简图的草图,然后计算机构的自由度,并将草图与实物对照,观察是否和实物相符合。 5、画正式的机构运动简图。 确定尺寸比例尺,认真测量机构各运动副之间的相对位置参数,在实验报告纸上用三角板和圆规,将上述草图按照选定的比例尺卩1(构件的真实长度与图示长度的比值,单位为m/mn或mm/mn画出正式的机构运动简图。 注:对于某些不便直接测定的机构尺寸,可首先分析其机构的性质,采用间接测量的办法。
平面机构及其运动简图
第一章 平面机构及其运动简图 案例导入:通过硬纸片是否钉在桌面上及常见的推拉门、活页等例子,引入自由度、铰链、铰接、约束条件和运动副、运动链、机构等概念,介绍运动副的分类;以牛头刨床为例子导入运动简图,介绍用简单的符号和图形表示机器的组成和传动原理。 第一节 平面运动副 一、平面运动构件的自由度 平面机构是指组成机构的各个构件均平行于同一固定平面运动。组成平面机构的构 件称为平面运动构件。 两个构件用不同的方式联接起来,显然会得到不同形式的相对运动,如转动或移动。为便于进一步分析两构件之间的相对运动关系,引入自由度和约束的概念。如图1-1所示,假设有一个构件2,当它尚未与其它构件联接 之前,我们称之为自由构件,它可以产生3个独立 运动,即沿x 方向的移动、沿y 方向的移动以及绕 任意点A 的转动,构件的这种独立运动称为自由度。 可见,作平面运动的构件有3个自由度。如果我们 将硬纸片(构件2)用钉子钉在桌面(构件1)上, 硬纸片就无法作独立的沿x 或y 方向的运动,只能 绕钉子转动。这种两构件只能作相对转动的联接称 为铰接。对构件某一个独立运动的限制称为约束条件,每加一个约束条件构件就失去一个自由度。 二、运动副的概念 机构是具有确定相对运动的若干构件组成的,组成机构的构件必然相互约束,相邻 两构件之间必定以一定的方式联接起来并实现确定的相对运动。这种两个构件之间的可动联接称为运动副。例如两个构件铰接成运动副后,两构件就只能绕轴在同一平面内作相对转动,称为转动副,见图1-2a)、b)所示。又如图1-2d)所示,一根四棱柱体1穿入另一构件2大小合适的方孔内,两构件就只能沿轴线X 作相对移动,称之为移动副;图1-2c)所示为车床刀架与导轨构成的移动副。我们日常所见的门窗活叶、折叠椅等均为转动副,推拉门、导轨式抽屉等为移动副。 图1-1 自由构件 图1-2 平面低副
机构运动简图的测绘和分析试验报告
实验一机构运动简图的测绘和分析 一.实验目的 1.学会根据各种机械实物或模型,绘制机构运动简图; 2.分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法; 3.加深对机构结构分析的了解。 二.设备和工具 1.各类典型机械的实物(如:缝纫机等) 2.各类典型机械的模型(如:内燃机模型、牛头刨床等); 3.钢皮尺,内外卡钳,量角器(根据需要选用); 4.三角板,铅笔,橡皮,稿纸(自备)。 三.原理和方法 1.原理 由于机构和运动仅与机构中所有的构件的数目的构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略的符号(如教科书和机械设计手册中有关“常用构件的运动副简图符号”的规定)来代替构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。表1-1为常用符号示例。 2.方法 (1)确定组成机构的构件数目 测绘时使被测绘机械缓慢运动,仔细观测机构的运动,区分各个运动单元,从而确 定组成机构的构件数目,找出原动件。 (2)测绘运动副的种类、数目 根据相联接两构件的接触情况及相对运动的特点,确定各个运动副的种类。(3)合理选择投影面,坐标和原动件位置 选与机构的各个构件上的点运动平面皆平行的平面,或选能反映机构运动特征的其 他平面做投影面。 转动(或移动)原动件,找出每个构件都能表达清楚的原动件位置。 (4)绘机构运动简图的示意图 徒手按规定的符号,凭目测,使图与实物大致成比例(转动副位置、移动副导路方
位,高副接触点及曲率),从原动件开始,依构件的连接次序,逐渐画出机构运动 简图的示意图。用数字1、2、3……区分构件,用字母A、B、C……区分运动副。(5)绘正式机构运动简图 仔细测量与机构运动有关的尺寸,即转动副间的中心距和移动导路的方向等,按适 当的比例尺画出正式机构运动简图。 四.步骤和要求 1.对指定绘制的几种机器或机构运动简图,其中至少有一种需按确定的比例尺绘制,其余的可凭目测,使图与实物大致成比例,这种不按比例尺绘制的简图通常称为机构示意图。
公交车门运动机构原理分析及模型制作
公交车门运动机构原理分析及模型制作 集团档案编码:[YTTR-YTPT28-YTNTL98-UYTYNN08]
公交车门运动机构原理分析及模型制作 材料科学与工程学院2011级卓越一班第2小组 组员:朱富慧、王文霞、徐潇、 赵洪阳 目录 一、车门机构数据采集 本组主要了解了k52路公交的车门构造,通过拍摄细节照片和录制视频收集数据,并分析其运动原理和利用solidworks软件制作其模型(该过程在保证机构正常运动前提下,仅做了少部分简化和优化,最大程度保持拟实性与美观性)。收集到的资料(视频资料参见附件)如下: 二、机构运动原理分析 车门运动机构简图
该运动机构包括5个构件,1、5为机架,2、3为杆件,4为滑块。 4个低副:3个转动副O1、O2、O3和一个移动副。 自由度F=3n-2P L-P H=3×3-2×4-0=1,自由度为1,有确定的运动。 三、装配分析 该机构中,1、5为机架,连接在车体上; 杆件2:柱子、柱子扣、连杆组成的整体; 杆件3:车门; O1:机构与动力系统连接形成的转动副; O2:连杆与门连接形成的转动副; O3:门与滑块4连接形成的转动副。 四、运动过程分析 开门时,动力系统通过转动副O1使杆件2顺时针转动,杆件2通过转动副O2及杆件3(门)带动滑块向两侧滑动同时在O3作用下使之逆时针旋转。关门与开门工程相反。 五、装配效果图(另可参见附件2) 六、装配效果动画展示 参见附件3.
七、部分零件模型(另可参见附件2) 八、成果与收获 在本次公交车门运动机构原理分析及模型制作的协作中,我们实地收集资料、分析原理、制作模型,并成功利用模型模拟了车门机构的运动。从中我们也遇到许多配合和尺寸方面的问题,提升了综合分析问题的能力,对机构运动原理也有了更为深刻的认识。
机构运动简图的测绘及分析实验指导书
实验一 机构运动简图的测绘及分析 一、目的要求 1. 学会根据各种机械实物或模型,绘制机构运动简图,了解运动副及构件的实际结构; 2. 分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法; 3. 加深对机构组成原理、机构结构分析的理解。 二、设备和工具 1. 各类典型机械的实物(如:牛头刨床、缝纫机头、插齿机等); 2. 课本,三角板,铅笔,橡皮,草稿纸(自备)。 三、原理和方法 1.机构运动简图是表征机器和机构传动原理及运动特征的简单的图形,由于机构的运动特性主要与机构的构件数目、构件与构件组成的运动副数目、运动副的类型和同一构件上各运动副的相对位置有关,因此在对机构进行分析时可以撇开构件的复杂外形和运动副的具体构造。 2.测绘机构运动简图的方法: (1)使被测机械缓慢运动,从原动件开始仔细观察机构运动的传递路径,了解其工作原理,从而确定组成机构的构件数目。 (2)根据相联接的两构件间的接触情况及相对运动的性质,确定各个运动副的类型。 (3)选择最能描述各构件相对运动关系的运动平面作为投影面,让机械停止在便于绘制简图的位置。从原动件开始,用规定符号及构件的联接次序(一个构件至少与二个构件用运动副相联接)逐步画出机构示意图,然后用数字(1、2、3……)分别标注各构件,用英文字母A 、B 、C ……分别标注各运动副。 (4)仔细测量机构的运动学尺寸(如构件上两回转副的中心距和移动副导路的位置等),按适当的比例尺将示意图画成正规的机构运动简图。 长度比例尺 ()l μ=构件实际长度米图中表示该构件的长度(毫米) (5)按公式 L H 32F n P P =-- 式中: n ——机构活动构件数 P L ——平面低副个数 P H ——平面高副个数 计算机构的自由度,注意局部自由度、复合铰和虚约束。 (6)除去原动件(原动件和机架)、去除虚约束、注意复合铰链中回转副的数目、高副低代后,观察经整理后的机构运动简图中有无IV 级或III 级基本杆组(表4),若没有,则按II 级基本杆组的5种形式将机构拆分.最后根据所含基本杆组的最高级别确定机构的级别。 四、实验步骤 1. 先在草稿纸上徒手绘制机构示意图,标注出必要的运动学尺寸,再按适当比例画成正规的机构运动简图,如果只要求画机构示意图可不进行测量,这时可凭目测使简图中构件的尺寸与实物大致成比例. 2. 计算机构的自由度,并将计算结果与实际机构对照,观察是否相符.否则应重新绘制
机构运动简图的绘制
机构运动简图的绘制 【一】能力目标 能根据实物绘制机构运动简图 【二】知识目标 1.了解机构组成原理 2.理解自由度、运动副、约束的概念及三者的关系 【三】教学的重点与难点 重点:平面机构的运动简图的绘制。 难点:绘制简图时构件及运动副的表示。 【四】教学方法与手段 多媒体教学,采用动画演示、实例分析、启发引导的教学方式。 【五】教学任务及内容 一、 的组 成 (一) 运动 副 a), 轴承中的滚动体与内外圈的滚道、图b)啮合中的一对齿廓、图c)滑块与导槽,均保持直接 接触,并产生一定的相对运动。因而它们都构成了运动副。构件上参与接触的点、线、面, 称为运动副的元素。 根据运动副对构件运动形式的约束及两构件接触方式的不同,运动副可如下分类: 1、高副 两构件通过点或线接触组成的运动副称为高副。如图所示,凸轮与从动杆及两齿轮分别 在其接触处组成高副。 2、低副两构件通过面接触组成的运动副称为低副。平面低副可分为转动副和移动副。 (1)转动副若运动副只允许两构件作相对转动,则称该运动副为转动副,也称铰链。 如图所示各构件的联接就是转动副。如果转动副的两构件之一是固定不动的,则称该转 动副为固定铰链。若转动副中两构件都是运动的,则称该转动副为活动铰链。 (2)移动副若运动副只允许两构件沿接触面某一方向相对滑移,则称该运动副为移 动副。如图所示。 y (二)自由度和运动副的约束 O 12
1、构件的自由度 在平面运动中,每一个独立的构件,其运动均可分为三个独立的运动,即沿x轴和y 轴的移动及在xoy平面内的转动。构件的这三种独立的运动称为其自由度,分别用x、y及α为三个独立参数表示。由上述可知:构件的自由度等于构件的独立运动参数。 平面内自由的构件,有3个自由度,而空间内自由的构件,有6个自由度。 2、运动副的约束 当两构件通过运动副联接,任一构件的运动将受到限制,从而使其自由度减少,这种限制就称为约束。每引入一个约束,构件就减少一个自由度。 (1)转动副 2——约束,1——自由度 (2)移动副 2——约束,1——自由度 (3)平面高副 1——约束,2——自由度 (三)运动链和机构 两个以上的构件以运动副联接而构成的系统称为运动链。未构成首末相连的封闭环的运动链称为开链,否则称为闭链。在运动链中选取一个构件固定(称为机架),当另一构件(或少数几个构件)按给定的规律独立运动时,其余构件也随之作一定的运动,这种运动链就成为机构。机构中输入运动的构件称为主动件,其余的可动构件称为从动件。由此可见,机构是由主动件、从动件和机架三部分组成的。 闭链开链 二、平面机构的运动简图 机构的运动简图:撇开那些与运动无关的构件的外形和运动副的具体结构,仅用简单的线条和规定的符号来表示构件和运动副,并按比例定出各运动副的相对位置,表达机构的各构件间的相对运动关系的简图。 (一)构件的表示方法 1、构件 (1)参与形成两个运动副的构件 (2)参与形成三个运动副的构件 2、转动副构件组成转动副时,其表示方法如图。图面垂直于回转轴线时用图a表示;图面不垂直于回转轴线时用图b表示。表示转动副的圆圈,其圆心必须与回转轴线重合。一 3
机构运动简图绘制分析实验(指导书)
实验一平面机构运动简图绘制和分析 一、实验目的 1.熟悉并掌握机构运动简图绘制的原理和方法,学会根据实际机械和模型绘制机构运动简图的技能; 2.加深和巩固机构自由度的计算方法,并检验机构是否具有确定运动; 3.加深对平面机构结构分析的了解。 二、实验内容及要求 1.以指定的3~4种机构模型或机器为研究对象,进行机构运动简图的绘制; 2.分析所画各机构的构件数、运动副类型和数目,计算机构的自由度,并验证它们是否具有确定的运动; 3.进行机构的结构分析。 三、实验设备和工具 1.各种机器实物和模型; 2.学生自备铅笔、直尺、圆规、橡皮、草稿纸等; 四、实验原理 机器和机构都是由若干构件及运动副组合而成。而机构的运动是由原动件的运动规律、联接各构件的运动副类型和机构的运动尺寸(即各运动副间相对位置尺寸)来决定的。因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简单的线条来代替构件。构件的表示法见图1。用规定的符号代表运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。常用运动符号示例见表1-1。 五、实验步骤 1、确定组成机构的构件数:缓慢转动机器,沿着运动传递的线路仔细看清各构件间的相对运动(有些相互连接构件间的相对运动非常微小),从而确定组成机构的构件数目。
2、确定运动副的类型:根据相互连接的两构件间的接触情况及相对运动特点,确定各个运动副的类型。 3、选定视图平面:一般选择与多数构件运动平面平行的平面为视图平面。 4、绘制机构示意图的草图:凭目测在草稿纸上徒手按规定的运动副代表符号,从原动件开始,按各构件的连接次序,用简单的线条代表构件,逐步画出机构示意图的草图。用数字1、2、3……分别标准各构件,用字母 A 、 B 、 C ……分别标准各运动副。 5、计算机构的自由度数,并将计算结果与实际机构的自由度相对照,观察二者是否相符。机构自由度的计算公式:F=3n-2PL-PH (式中: n 为活动构件的数目;P L 为低副的数目; P H 为高副的数目。) 6、测量机构运动尺寸:对转动副测量回转中心间的相对尺寸;对移动副测量导路方向线和与其有关的其他运动副间的相对尺寸。 7、选取适当的比例尺:长度比例尺 ) ()(mm mm l 图纸上所画的长度构件实际长度=μ 8、绘制机构运动简图:按一定的比例尺。用制图仪器画成正式的机构运动简图。 图1 构件的表示法