Fanuc_ROBOT_IRVISION_中文使用手册

iRVision 小结
1.1 Offset 补偿和检测方式
根据iRVision 的补偿和测量方式的不同,iRVision 可作以下分类:
对具体的应用,理解不同iRVision 的特性并选择一个适合的应用是非常重要的。
●
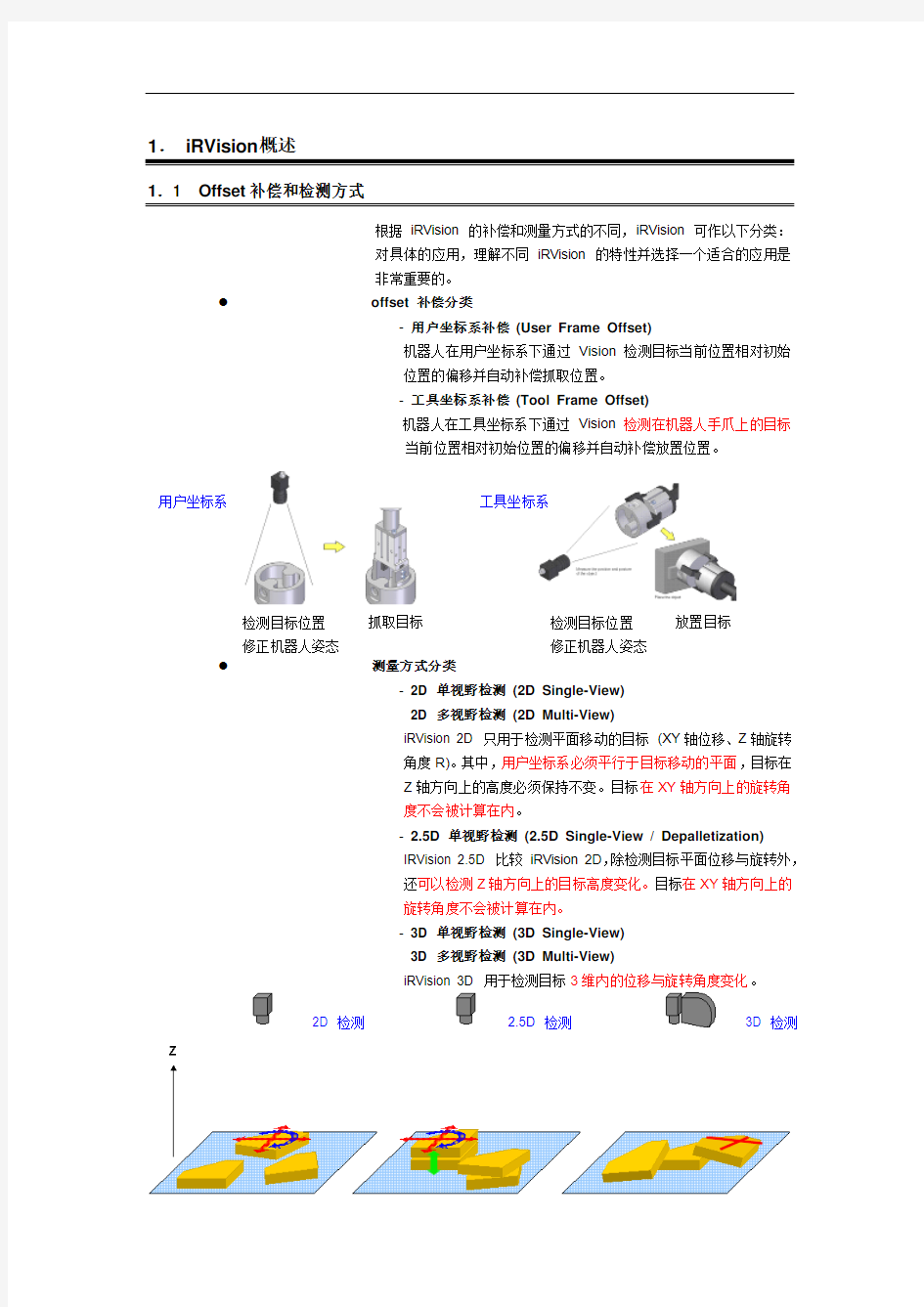
offset 补偿分类
- 用户坐标系补偿 (User Frame Offset)
机器人在用户坐标系下通过Vision 检测目标当前位置相对初始位置的偏移并自动补偿抓取位置。 - 工具坐标系补偿 (Tool Frame Offset)
机器人在工具坐标系下通过Vision 检测在机器人手爪上的目标
当前位置相对初始位置的偏移并自动补偿放置位置。
●
测量方式分类
- 2D 单视野检测 (2D Single-View) 2D 多视野检测
(2D Multi-View)
iRVision 2D 只用于检测平面移动的目标 (XY 轴位移、Z 轴旋转角度R)。其中,用户坐标系必须平行于目标移动的平面,目标在Z 轴方向上的高度必须保持不变。目标在XY 轴方向上的旋转角度不会被计算在内。
- 2.5D 单视野检测 (2.5D Single-View / Depalletization) IRVision 2.5D 比较 iRVision 2D ,除检测目标平面位移与旋转外,还可以检测Z 轴方向上的目标高度变化。目标在XY 轴方向上的旋转角度不会被计算在内。 - 3D 单视野检测 (3D Single-View) 3D 多视野检测 (3D Multi-View)
iRVision 3D 用于检测目标3维内的位移与旋转角度变化。
检测目标位置 修正机器人姿态
放置目标
检测目标位置 修正机器人姿态
抓取目标
用户坐标系 工具坐标系
2D 检测
2.5D 检测
3D 检测
1.2 照相机固定方式
iRVision支持以下的照相机安装方式:
●固定照相机(fixed camera)
优势:可以在机器人运动时照相。
照相机连接电缆铺设简易化。
可以使用Tool frame offset。
劣势:检测区域固定化。
如果因外界因素导致照相机和机器人间相对位置变更,
必
须重新示教camera calibration。
●照相机固定在机器人上(robot-mounted camera)
优势:检测区域可以随机器人变化,整体检测范围增加。
较大的照相机焦距使用可能,检测精度提升。
易拓展再检测功能。
劣势:机器人必须停止照相。
必须注意光源是否被机器人或外围设备干涉。
必须注意照相机连接电缆的磨损现象。
配置照相机后面板开关
SONY XC-56 or SONY XC-HR50、XC-HR57
照相机与控制柜的连接
R-30iA控制柜主板上有一个照相机接口(JRL6),视觉板上有四个照相机接口(JRL6A~D)。
1)当只使用一个照相机时,将照相机直接连接到主板端口JRL6上或视觉板端口JRLA上2)当使用多个照相机时,可用复用器连接。
复用器的连接
三种复用器
2.2启动设置
软件需求:
●1A05B-2500-J868 ! iR Vision Standard
●1A05B-2500-J869 ! iR Vision TPP I/F
●1A05B-2500-J871 ! iR Vision UIF Controls
●1A05B-2500-J900 ! iR Vision Core
●1A05B-2500-J901 ! iR Vision 2DV
●1A05B-2500-J902 ! iR Vision 3DL
Ethernet连接:
机器人电脑
IP地址10.10.10.1 10.10.10.2
子网掩码255.255.255.0 255.255.255.0
网关10.10.10.1 10.10.10.1
机器人控制柜IP地址设置
1)MENUS——[6 SETUP]
2)按F1 [TYPE]——[Host Comm]
3)选TCP/IP
4)输入机器人控制柜名[Robot name]
5)输入机器人控制柜IP地址[Port#1 IP addr]
6)输入子网掩码[Subnet mask]
7)输入IP地址默认网关[Router IP addr]
8)关机重启
PC 的IP地址设置
1)在“控制面板”中双击“网络连接”——右击“本地连接”——选择“属性”
2)选择“Internet 协议(TCP/IP)”——点击“属性”
3)选取“使用下面的IP地址”——分别输入“IP地址”、“子网掩码”、“默认网关”——点击“确认”
修改IE浏览器设置
1)在“控制面板”中双击“Internet 选项”——选择“安全”标签
2)选取“可信站点”——点击“站点”
3)在“该网站添加到区域”中输入机器人控制柜IP地址——点击“添加”
4)不选“对该区域中的所有站点要求服务器验证(https:)”——点击“关闭”
5)选择“隐私”标签——点击“弹出窗口阻止程序”中的“设置”按钮
6)在“要允许的网站地址”中输入机器人控制柜IP地址——点击“添加”——点击“关闭”
7)选择“连接”标签——点击“局域网设置”
8)不选“代理服务器”下“为LAN使用代理服务器”选项
9)点击“确定”,完成设置
修改Windows防火墙设置
1)在“控制面板”中,双击“网络和Internet连接”
2)双击“Windows防火墙”——选择“例外”标签
3)点击“添加程序”——选择“Internet Explorer”
4)点击“确认”,完成修改
在PC上安装Vision UIF 控件
1)打开“IE浏览器”,在“地址栏”中输入机器人控制柜IP地址,打开机器人主页
2)在“iR Vision”中点击[Vision Setup],如PC已安装该控件,则进入Vision Setup 页面;如PC未安装该控件,则弹出安装“Localhost”对话框
3)选择MC或USB,点击“Continue”,弹出“File Download”对话框
4)点击“Run”开始下载
5)下载完成时弹出安装对话框,点击“Run”开始安装,安装完毕时,IE浏览器自行关闭
3.1 iRVision 一般流程
3.2 示教用户坐标系 (Application User Frame)
1) 机器人工具坐标系标定 (TCP)
使用6点法标定一个准确的机器人工具坐标系(TCP)。
- 在作成用户坐标系和照相机标定时,必须使用点对点的示教形式,所以我们需要一个准确的TCP 。
- 对TCP 选择哪一个点并无特别要求,一般,我们选择把示教用针安置在机器人手爪上,以针的顶端为TCP 原点。 - 使用精度高的示教用针将节省再次示教时间。
- TCP 的精度高低将影响整个iRVision 的精度,请准确的进行TCP 的示教并确认其准确性,因为对TCP 的方向性无要求,三点法也可以使用。
使用精度高的三爪卡盘和唯一的针
以针顶端为原点设置TCP 改变机器人姿态,调整手爪方向性确认TCP 的准确性,TCP 精度会影响Vision 的精度
2) 应用用户坐标系标定 (Application User Frame) 使用作好的工具坐标系标定一个用户坐标系,我们称此用户坐标
系为Application User Frame 。
- 一般此用户坐标系设置在目标定位的平面上任意水平位置。 - 照相机标定对应照相机在此用户坐标系内的相对位置。 - 确认XY 平面平行与目标位移的平面,Z 轴正方向指向照相机。 - Vision 检测出目标在用户坐标系内位置并补偿给机器人。
3.3 设置照相机 (Camera Setup)
1) 打开机器人主页,选择 [Vision Setup] 进入Vision 设置界面。 2) 选择 [Camera Setup Tools],点击
,新建一个照相机。
Name : 照相机名 Type : 照相机形式 请选择
Progressive Scan Camera
3) 点击 [OK] 确认,双击建立的照相机或点击
选择,进入照相机设置界面,完成如下设置。
Comment :注释 Port Number :接口号 请选择照相机对应连接接口 Camera Type :照相机型号SONY XC-56
Default Exposure Time : 默认曝光时间
曝光时间↑,视野明暗度↑ 曝光时间↓,视野明暗度↓ 请调整合适值
Robot Mounted Camera : 照相机是否固定在机器人上
Robot Holding the Camera :
当照相机固定在机器人上时
设置固定相机的机器人
Camera parameters:相机参数
4) 完成所有设置后,点击 [SAVE] 存盘。
在照相机标定时,照相机相对用户坐标系的位置和方向将被计算所得。 Application User Frame World Frame
照相机确定目标,并计算在用户坐标系内的偏移。
机器人基于在用户坐标系内的偏移进行运动。
3.4 照相机标定 (Camera Calibration)
照相机标定用于建立照相机坐标系与应用坐标系(Application User Frame) 之间的对应关系。iRVision 支持以下2种标定方式。
● 简易二点法 (Simple 2D calibration) 可以对应多种2D 视觉应用。 ● 栅格板标定 (Grid calibration)
可以对应所有 2D/3D 视觉应用。可细分为:
- 2D 标定 (Grid pattern calibration) - 3D 标定 (3D Laser calibration)
- 视觉跟踪标定 (Visual tracking calibration)
3.4.1 照相机镜头调整 (Adjustment of lens)
在选定照相机后,完成标定前,一般需要先对镜头做下调整,调整步
骤如下:
1) 在Camera Setup Tools 下选择需要标定的照相机,进入Camera
Setup 界面。点击
进行连续成像。查看视野内是否能有效观测
到目标。如不能,调整目标位置(对Fixed Camera)或示教机器人(对Robot-mounted Camera)
2) 调整镜头光圈至最小,虹径放至最大,点击
进行一次成像,观
察成像效果,调整曝光时间,比对视野内最亮区域和最暗区域,
保持最亮区域的灰度(g)在200左右。
3) 调整镜头焦距使成像清晰,测量镜头至成像目标间的距离并记录,
在此我们记录为H 。
4) 调整镜头光圈至最大,虹径放至最小,点击
进行一次成像,观
察成像效果,降低曝光时间,比对视野内最亮区域和最暗区域,
保持最亮区域的灰度(g)在200左右。
5) 锁定镜头光圈和焦距,记录曝光时间t ,调整完毕。 通过调整镜头,将会得到清晰的成像和较短的曝光时间。 注意事项:
● 对3D 应用,照相机镜头不可调整,H 值为400mm 。
Live Image : 连续成像 Snap Image : 一次成像 (row, col, g): 行、列、灰度
H
选择一个明显可见的目标作为成像对象
3.4.2 简易二点法(Simple 2D Calibration)
简易二点法只适用于旧版本2D视觉应用。系统通过2个不同点位的坐标转换来换算得出照相机和用户坐标系间的相对关系。( X轴、Y轴的偏移和指向) 在条件允许的情况下,我们推荐尽量使用栅格板标定。(Grid pattern Calibration)因为栅格板标定更简单、更精确。
简易二点法步骤如下:
1) 打开机器人主页,选择[Vision Setup] 进入Vision设置界面。
2) 选择[Camera Calibration Tools],点击,新建一个标定。
Name:标定名
Type:标定形式
请选择
Simple 2-D Calibration Tool
3) 点击[OK] 确认,双击建立的标定或点击选择,进入简易二点法标定设置界面,完成以下设置。
Comment:注释
Camera:照相机名
请选择你想标定的照相机
Exposure Time:
曝光时间
曝光时间↑,视野明暗度↑
曝光时间↓,视野明暗度↓
请调整为合适值t
Application User Frame:
应用用户坐标系号,照相机
标定时使用的机器人用户坐
标。在2D运用中,设定的用
户坐标系XY平面必须与目
标工件平面平行。指定3.2所
述的用户坐标系
4) 在照相机视野范围内斜角放置两块明显标志物,点击进行一次成像。
标志物#1
标志物#2
5) 在Calibration Point #1中点击[Find],将第一点用显示红框围绕起来,点击[OK] 确认,重复此步骤于第二点Calibration Point#2。[Edit] 可用于细微调整标定中心(屏幕显示为带标号绿色十字)。
6) 以3.2所述工具坐标系的端点为基点,示教机器人TCP基点对应Calibration Point#1中第一点十
字中心。然后在在Calibration Point #1中点击[Record],重复此步骤于第二点Calibration Point#2。
系统自动解算出照相机与用户坐标系对应关系并显示于Calibration Date中。
7) 完成所有设置后,点击[SAVE] 存盘。
注意事项:
●正确设置应用用户坐标系,确认应用用户坐标系的X-Y平面与目标移动平面平行。正确
设置照相机,确认照相机的光轴与应用用户坐标系垂直。应用用户坐标系的Z轴必须指向
照相机。
●应用用户坐标系必须在照相机标定执行前设置,在标定照相机后,更改应用用户坐标系将
必须重新标定照相机。
●用于标定照相机的标志物高度必须与目标一致。
●有如下2种情况,请使用栅格板标定
- 选用短焦距镜头时(焦距小于12mm),镜头的失真将反向影响偏移的精确性。
- 复数目标存在不同高度,简易二点法不支持复数目标不同高度的侦测。
工件在水平面运动工件在斜面运动
3.4.3 2D 标定 (Grid pattern Calibration)
标准照相机标定方式,对于2D 应用,我们采用如下2种方式:
● 单板标定 (1 plane) ●
双板标定 (2 plane)
2D 标定步骤如下:
1) 打开机器人主页,选择 [Vision Setup] 进入Vision 设置界面。 2) 选择 [Camera Calibration Tools],点击
,新建一个标定。
Name :标定名 Type :标定形式 请选择
Grid Pattern Calibration
3) 点击 [OK] 确认,双击建立的标定或点击
选择,进入2D 栅格标定设置界面,完成以下设置。
Comment :注释 Camera :照相机名 请选择你想标定的照相机 Exposure Time : 曝光时间
曝光时间↑,视野明暗度↑ 曝光时间↓,视野明暗度↓ 请调整为合适值t Application User Frame : 应用用户坐标系号,照相机标定时用的机器人用户坐
标。在2D 运用中,设定的用户坐标系XY 平面必须与目标工件平面平行。指定3.2所述的用户坐标系
4) 对应不同的iRVision 应用方式,选择单板标定或双板标定,完成以下设置。
Number of Planes : 选择是单板或双板,由照相机安装方式决定
单板:照相机固定并且固定装置静止
双板:照相机或栅板安装在机器人手臂上
Calib.Grid Held by Robot 选择栅格板是否安装在机器人上
Robot Holding Fixture :
选择工件夹具是否受机器 人控制
Grid Spacing :栅格距离
设定栅格板上栅格点间的距离,默认为15mm
5) 示教机器人计算标定坐标系(Calibration Grid Frame),完成如下设置。
Calibration Grid Frame:
选择示教完成的标定坐标系
●栅板安装在固定位置,选
择用户坐标系;
●栅板安装在机器人手臂上,
选择工具坐标系
Projection:
选择Perspective中心投影
Override Focal Distance:
镜头焦距设置
单板标定选择Yes,设置镜头焦距值,双板标定选择No 标定坐标系点对点示教方式(touch up):
-栅格板不安装在机器人上,Calibration Grid Frame选择User Frame,以工具坐标系端点为基点,四点
法设置。
-栅格板安装在机器人上,Calibration Grid Frame选择Tool Frame,以工具坐标系端点为基点,六点法设置。工具坐标系示教完成后,手动将X轴旋转角度W增加90°完成。
标定坐标系自动示教方式 (Vision frame setting):
通过Vision frame setting 功能,机器人可以自动检测并计算标定坐标系 (Calibration Grid Frame)。 软件需求:Vision TCP A05B-2500-J867 执行VFTUMAIN.TP 程序如下:
设置用户坐标系 设置工具坐标系 示教程序起始机器人位置 设置照相机曝光时间 设置机器人姿态
计算TCP
将计算所得TCP 导入User Frame
详细设置请参考相关手册。
6) 如果选择单板标定,将栅格板放置于照相机视野中并使栅格板饶X
或Y 轴轴旋转30度左右。点击
进行一次成像,在1#Plane 中
点击
[Find]
,将栅格板成像用红框围绕起来,点击 [OK] 确认。点击
[Set Frame],完成标定。如果选择双板标定,跳过此步。
7) 如果选择双板标定,示教机器人使栅格板置于照相机视野中,示教机器人高度低于最佳成像高度H 50mm ,点击
进行一次成像,
在1#Plane 中点击 [Find],将栅格板成像用红框围绕起来,点击 [OK] 确认。示教机器人高度高于最佳高度50mm ,点击
进行
一次成像,在2#Plane 中点击 [Find],将栅格板成像用红框围绕
起来,点击 [OK] 确认。点击[Set Frame],完成标定。
8) 点击 [Point] 选项,核对
30°
注意侦测范围 避免非侦测点的干扰
1#Plane
是否有和实际点位误差较大的点 (Err>0.5),如有,在Point Number 内填写需要删除的点,点击 [Delete],标定数据将重新计算。
侦测点数据列表
9) 点击 [Date] 选项,核对标定结果 (Focal Distance 和Position of
Camera Relative to Calibration Grid)。完成所有设置后,点击
Focal Distance :焦距
核
对是否接近镜头焦距±5%
L
ens Distortion :镜头失真度
M
agnification :放大倍率
核
对是否在0.3~0.5mm/pixel
I
mage Center :成像中心
核
Mean error value :平均误差值 Maximum error value :最大误差值
注意事项:
● 正确设置应用用户坐标系,确认应用用户坐标系的X-Y 平面与 目标移动平面平行。正确
设置照相机,确认照相机的光轴与应用用户坐标系垂直。应用用户坐标系的Z 轴必须指向照相机。
● 应用用户坐标系必须在照相机标定执行前设置,在标定照相机后,更改应用用户坐标系将
必须重新标定照相机。
● 使用Vision frame setting 标定时请注意机器人运动范围,确认与周遍设备无干涉。因为
在计算完成后坐标系值将改变,在示教机器人程序起始点时请使用J 关节模式。
● Vision frame setting 只对6轴机器人有效,4轴和5轴机器人不能使用此功能,对应照
相机型号为 SONY XC-56。
照相机相对栅格板位置
3.4.4 3D 标定 (3D Laser Calibration)
3D 照相机标定方式,如果照相机用于2D 应用,3D 标定同样有效。 3D 标定步骤如下:
1) 打开机器人主页,选择 [Vision Setup] 进入Vision 设置界面。 2) 选择 [Camera Calibration Tools],点击
,新建一个标定。
Name : 标定名 Type : 标定形式 请选择
3D Calibration Tools
3) 点击 [OK] 确认,双击建立的标定或点击选择,进入2D 栅格 标定设置界面,完成以下设置。
Comment :注释 Camera :照相机名 请选择你想标定的照相机 Exposure Time :曝光时间 曝光时间↑,视野明暗度↑ 曝光时间↓,视野明暗度↓ 请调整为合适值t Laser Exposure Time : 激光曝光时间
Application User Frame : 应用用户坐标系号
指定3.2所述的用户坐标系
4) 选择双板标定,同 2D 标定一样,示教机器人计算标定坐标系 (Calibration Grid Frame),完成以
下设置。
Calib.Grid Held by Robot : 选择栅格板是否安装在机器人上
Robot Holding Fixture : 选择工装夹具是否受机器人控制
Calibration Grid Frame : Grid Spacing :栅格距离,设定栅格板上栅格点间的距离,默认为15mm
选择示教完成的标定坐标系
●栅板安装在固定位置,选择用户坐标系; ●栅板安装在机器人手臂上,选择工具坐标系
Projection :选择Perspective 中心投影
5) 设置激光参数或维持默认值,点击
进行连续成像,点击
显示屏幕中心,点击
打开激光,
示教机器人使栅格板中心、屏幕中心和激光交叉点重合并确认3D 相机至栅格板距离是否在400mm 左右。
Min. Laser Contrast : 最小激光对比度,默认50 Min. Num. Laser Points : 最小激光点数,默认50 Max. Line Fit Error : 最大线性误差,默认3mm Status of Fixture Position: 当照相机没有安装在机器人上时,点击[Set]将Application User Frame 作为标定固定装置的位置
6) 示教机器人高度为350mm ,点击
进行一次成像,在1#Plane
中点击 [Snap and Find],将栅格板成像用红框围绕起来,点击
[OK] 确认。示教机器人高度为450mm ,点击
进行一次成像,
在2#Plane 中点击 [Snap and Find],将栅格板成像用红框围绕起来,点击 [OK] 确认。点击[Set],完成标定。
7) 点击 [Point] 选项,核对是否有和实际点位误差较大的点
(Err>0.5),如有,在Point Number 内填写需要删除的点,点击 [Delete],标定数据将重新计算。
侦测点数据列表
1#Plane
8) 点击 [Date] 选项,核对标定结果 (Focal Distance 和Position of
Calibration Grid)。完成所有设置后,点击 Focal Distance :焦距 核对是否接近镜头焦距±5% Lens Distortion :镜头失真度 Magnification :放大倍率 核对是否在0.3~0.5mm/pixel Image Center :成像中心 核对是否在(240,256)±10% Mean error value :平均误差值 Maximum error value :最大误差
注意事项:
● 正确设置应用用户坐标系,确认应用用户坐标系的X-Y 平面与 目标移动平面平行。正确
设置照相机,确认照相机的光轴与应用用户坐标系垂直。应用用户坐标系的Z 轴必须指向照相机。
● 应用用户坐标系必须在照相机标定执行前设置,在标定照相机后,更改应用用户坐标系将
必须重新标定照相机。
视觉跟踪标定是照相机标定在视觉跟踪的运用。 视觉跟踪标定步骤:
1) 打开机器人主页,选择 [Vision Setup] 进入Vision 设置界面。 2) 选择 [Camera Calibration Tools ],点击,新建一个标定。
Nam :标定名
Type:标定形式,选择Visual Tracking Calibration 3) 点击 [OK] 确认,双击建立的标定或点击
选择,进入视觉跟踪标定设置界面,完成以下设置。 Comment: 注释 Camera: 照相机名 Line : 选择视觉跟踪线
Exposure Time: 曝光时间。曝光时间↑,视野明暗度↑;曝光时间↓,视野明暗度↓
请调整为合适值t
Projection: 选择Perspective中心投影
Grid Spacing: 栅格距离,设定栅格板上栅格点间的距离,默认为15mm
Override Focal Length: 选[Yes]并输入镜头焦距
4)点击Calibration Wizard进入标定向导界面,将标定板放在照相机视野内,点击[OK]
①将栅格板成像用红框围绕起来,点击[OK] 确认,弹出[Origin point]对话框
②开动传送带,使标定板移动到安装了iR Vision 的机器人前
③点动机器人,示教TCP到标定板原点,点击[OK]
④弹出[X axis direction point]对话框,点动机器人,示教TCP到标定板X轴方向上的一个点,点击[OK]
⑤弹出[Y axis direction point]对话框,点动机器人,示教TCP到标定板Y轴方向上的一个点,点击[OK],
完成设置
5)点击[Point] 选项,核对是否有和实际点位误差较大的点(Err>0.5),如有,在Point Number内填写需
要删除的点,点击[Delete],标定数据将重新计算。
6) 点击[Date] 选项,核对标定结果(Focal Distance和Position of Camera Relative to Calibration Grid)。
完成所有设置后,点击[SAVE] 存盘。
3.5 视觉程序示教(Vision Process)
简述常用的iRVision视觉程序示教。
- 2D 单视野/多视野(2D Single-View/Multi-View)
- 2.5D 单视野(2.5D Single-View)
- 3D 单视野/多视野(3D Single-View/Multi-View)
-
3.5.1 2D单视野(2D Single-View)
2D 单视野视觉程序示教步骤如下:
1) 打开机器人主页,选择[Vision Setup] 进入Vision设置界面。
2) 选择[Vision Process T ools],点击,新建一个标定。
Type:应用形式
请选择
2D Single-View Vision
Name:程序名
3) 点击 [OK] 确认,双击建立的标定或点击选择,进入2D 单视野程序设置界面,完成以下设置。
Camera Calibration : 选择3.4完成的照相机标定 Exposure Time :曝光时间 曝光时间↑,视野明暗度↑ 曝光时间↓,视野明暗度↓ 请调整为合适值t
Multi-Locator Find Mode : 复数位置寻找模式 Find Best 寻找有效值最高 Find First 寻找第一个有效 详细设置请参考有相关手册 Number to Find :目标数量
4) 根据不同的应用形式,选择对应的偏移方式,完成以下设置。
Offset Mode :偏移方式 Fixed Frame Offset 用户坐标系偏移 Tool Offset 工具坐标系偏移 Found Position 绝对位置 (一般不使用) Robot Holding the Part : 选择目标是否受机器人控制,对应Tool Offset User Tool Number : 选择对应Tool Offset 工具坐标系
5) 选择目标的成像面,测量目标成像面与应用用户坐标系间距离h 。
对复数以上的目标,在 [Ref. Date Index to Use] 选择Model ID ,点击新建一个Model ,进行同样的设置。
应用用户坐标系X-Y 平面
Z
A
fluke使用说明
美国福禄克FLUKE Dtx-1800简单操作步骤说明: 一、福禄克测试仪初始化步骤: 1、充电: 将Fluke dtx系列产品主机、辅机分别用电源适配器充电,直至电池显示灯转为绿色; 2、设置语言: 操作:将fluke dtx系列产品主机旋钮转至“SET UP”档位,按右下角绿色按钮开机;使用↓箭头;选中第三条“Instrument setting ”(本机设置)按“ENTER”进入参数设置,首先使用→箭头,按一下;进入第二个页面,↓箭头选择最后一项Language按“ENTER”进入; ↓箭头选择最后一项 Chinese 按“ENTER”选择。将语言选择成中文后才进行以下操作。 3、自校准: 取fluke dtx系列产品Cat 6A/Class EA 永久链路适配器,装在主机上,辅机装上Cat 6A/Class EA 通道适配器。然后将永久链路适配器末端插在Cat 6A/Class EA 通道适配器上;打开辅机电源,辅机自检后,“PASS”灯亮后熄灭,显示辅机正常。“SPECIAL FUNCTIONS”档位,打开主机电源,显示主机、辅机软件、硬件和测试标准的版本(辅机信息只有当辅机开机并和主机连接时才显示),自测后显示操作界面,选择第一项“设置基准”后(如选错用“EXIT”退出重复),按“ENTER”键和“TEST”键开始自校准,显示“设置基准已完成”说明自校准成功完成。 二、设置福禄克测试仪基本参数 操作:将fluke dtx系列产品主机旋钮转至“SET UP”档位,使用“↑↓”来选择第三条“仪器值设置”,按“ENTER”进入参数设置,可以按“←→”翻页,用“↑↓”选择你所需设置的参数,按ENTER进入参数修改,用“↑↓”选择你所需采用的参数设置,选好后按ENTER 选定并完成参数设置。 1、新机第一次使用需要设置的参数,以后不需更改。(将旋钮转至“SET UP”档位,使用↓箭头;选中第三条:仪器设置值按ENTER进入如果返回上一级请按EXIT): 1) 线缆标识码来源:(一般使用自动递增,会使电缆标识的最后一个字符在每一次保存测试时递增一般不用更改) 2) 图形数据存储:(是)(否)通常情况下选择(是) 3) 当前文件夹: DEFAULT 可以按ENTER进入修改其名称(你想要的名字) 4) 结果存放位置:(使用默认值“内部存储器”假如有内存卡的话也可以选择“内存卡”) 5) 按→进入第2个设置页面,操作员:You Name 按ENTER 进入按F3删除原来的字符“←→↑↓”来选择你要的字符选好后按ENTER确定 6) 地点: Client Name,是你所测试的地点可以依照地e)小点进行修改 7) 公司:You Company Name,你公司的名字 8) 语言:Language,默认是英文 9) 日期:输入现在日期 10) 时间:输入现在时间 11) 长度单位:通常情况下选择米(m) 2、新机不需设置采用原机器默认值的参数: 1) 电源关闭超时:默认30分钟
fluke使用说明书
福禄克FLUKE DTX系列(Dtx-1800,Dtx-1200,Dtx-lt)简单操作步骤说明: 一、福禄克测试仪初始化步骤: 1、充电:产品主机、辅机分别用电源适配器充电,直至电池显示灯转为绿色; 2、设置语言: 操作:将fluke dtx系列产品主机旋钮转至“SET UP”档位,按右下角绿色按钮开机;使用↓箭头;选中第三条“Instrument setting ”(本机设置)按“ENTER”进入参数设置,首先使用→箭头,按一下;进入第二个页面,↓箭头选择最后一项Language按“ENTER”进入; ↓箭头选择最后一项 Chinese 按“ENTER”选择。将语言选择成中文后才进行以下操作。 3、自校准: 取fluke dtx系列产品Cat 6A/Class EA 永久链路适配器,装在主机上,辅机装上Cat 6A/Class EA 通道适配器。然后将永久链路适配器末端插在Cat 6A/Class EA 通道适配器上;打开辅机电源,辅机自检后,“PASS”灯亮后熄灭,显示辅机正常。“SPECIAL FUNCTIONS”档位,打开主机电源,显示主机、辅机软件、硬件和测试标准的版本(辅机信息只有当辅机开机并和主机连接时才显示),自测后显示操作界面,选择第一项“设置基准”后(如选错用“EXIT”退出重复),按“ENTER”键和“TEST”键开始自校准,显示“设置基准已完成”说明自校准成功完成。 二、设置福禄克测试仪基本参数 操作:将fluke dtx系列产品主机旋钮转至“SET UP”档位,使用“↑↓”来选择第三条“仪器值设置”,按“ENTER”进入参数设置,可以按“←→”翻页,用“↑↓”选择你所需设置的参数,按ENTER进入参数修改,用“↑↓”选择你所需采用的参数设置,选好后按ENTER 选定并完成参数设置。 1、新机第一次使用需要设置的参数,以后不需更改。(将旋钮转至“SET UP”档位,使用↓箭头;选中第三条:仪器设置值按ENTER进入如果返回上一级请按EXIT): 1) 线缆标识码来源:(一般使用自动递增,会使电缆标识的最后一个字符在每一次保存测试时递增一般不用更改) 2) 图形数据存储:(是)(否)通常情况下选择(是) 3) 当前文件夹: DEFAULT 可以按ENTER进入修改其名称(你想要的名字) 4) 结果存放位置:(使用默认值“内部存储器”假如有内存卡的话也可以选择“内存卡”) 5) 按→进入第2个设置页面,操作员:You Name 按ENTER 进入按F3删除原来的字符“←→↑↓”来选择你要的字符选好后按ENTER确定 6) 地点: Client Name,是你所测试的地点可以依照地e)小点进行修改 7) 公司:You Company Name,你公司的名字 8) 语言:Language,默认是英文 9) 日期:输入现在日期 10) 时间:输入现在时间 11) 长度单位:通常情况下选择米(m) 2、新机不需设置采用原机器默认值的参数: 1) 电源关闭超时:默认30分钟 2) 背光超时:默认1分钟 3) 可听音:默认是 4) 电源线频率:默认50Hz
生物软件使用说明书大全
生物软件使用说明书大全 生物软件使用说明书大全 转自: SPSS10教程 SAS6.12统计教程 统计软件SAS 8.2教程 Stata统计学教程入门 Eviews3.1使用入门教程1 软件中文使用说明书大全 ? ·NoteExpress初级教程(step by step) ? ·常用生物软件简介汇总(window 版) ? ·STATISTICA/w 5.0及其在医学中的应用 ? ·利用Excel处理统计数据 ? ·数据分析、科技绘图的必备工具-Microcal O () ? ·Band Leader中文使用说明书 ? ·BioEdit中文使用说明书下载 ) ? ·Cn3D中文说明书下载 ? ·Gel-PRO ANALYZER凝胶定量分析软件演示操作 ) ? ·Gene Construction Kit中文使用手册 ) ? ·aminoXpress中文使用说明书 ) ? ·DNAtools中文说明书下载 ? ·综合性序列分析软件DNAStar中文使用说明书 ) ? ·Reference Manager 10中文使用说明书 ? ·Genamics中文使用说明书) ? ·Vector NTI9.0中文使用说明书 ) ? ·Winplas中文使用说明书 ? ·RNA Structure 3中文使用说明书) ? ·Primer Premier中文使用说明) ? ·进化树分析及相关软件使用说明) ? ·观察生物分子的窗口——RasMol 2.6 ) ? ·RNAdraw1.1b2功能介绍) ? ·SEQUIN3使用中文说明书 ? ·JELLYFISH 1.3 使用手册) ? ·Omiga使用中文说明书 ? ·Excel 提速12招 ? ·修复受伤的Excel文件 ? ·用好Word 2003的比较功能 ? ·抓图高手:SnagIt使用技巧3例 ? ·DNASTAR-MAPDRAW软件使用教程[图解] ? ·DNASTAR-EDITSEQ软件使用教程[图解] ? ·核酸序列分析软件DNAssist1.0教程[图解] ? ·BandScan使用教程[图解] ? ·蛋白序列分析软件包ANTHEPROT 4.3中文说明书
Aquachem中文教程彩图详解
AquaChem 简要使用说明GAOZANDONG@https://www.360docs.net/doc/1514372894.html,
AquaChem 简要使用说明 (编译) --AquaChem是用于水溶液地球化学数据的分析、作图和模拟的专业软件,加拿大滑铁卢水文地质有限公司(Waterloo Hydrogeologic, Inc.)与Lukas Calmbach博士合作开发,前者拥有版权。 --本说明为中国西北地下水开发培训班学员专用。是在阅读原版用户手册基础上的摘译,并进行重新编排,在省略很多内容的同时对某些操作步骤进行了更为详细地介绍,目的是让计算机操作不很熟练、英语阅读有一定困难的学员对该软件有一个初步了解并能够实际操作。 --如果想深入了解和应用AquaChem软件,请参阅用户手册。 该手册以电子文本方式存储在安装目录下的Tutorials文件夹内,文件名为aqcdemo.pdf。如果计算机内没有安装打开该文件的Acrobat阅读器,可从互联网上免费下载安装(从任一网站如新浪、搜狐等的搜索引擎上查找以“acrobat”为关键词的“软件”)。
1、简介 AquaChem是一个专门用于水溶液地球化学数据的图形和数值分析的软件包。它具有完全可以由用户自己定制的地球化学数据和参数数据库系统,并提供水文地球化学领域得到广泛应用的多种数据分析和作图工具。 AquaChem的数据分析功能包括单位转换、电荷平衡、样品混合以及样品相关性分析和地球化学参数计算等,辅之以广泛应用的水化学数据图形工具,可以更清楚地表示水的化学特征和质量。AquaChem的图形工具包括: ●三线图,包括piper(图1-1a)、Durov(图1-1b)和简单的三离子三线图(图1-1c); a,Piper三线图 b,Durov三线图c,三线图 图1-1 AquaChem中的三线图 a,饼图b,Schoeller指印图 c,Stiff折线图 d,放射图 图1-2 AquaChem中的饼图、折线图和放射图 ●饼图(图1-2a)、折线图(Schoeller指印图,图1-2b;Stiff折线图,图1-2c)和
Gblocks使用说明书-by florawz1
Gblocks使用说明书(by florawz) 1.首先打开软件,进入主页面 2.输入O ,然后回车,对话框显示输入一个文件或路径 此时将比对好的(.fas)文件拖入对话框。对话框即出现该文件的路径(如图) 按回车,即导入该序列。对话框上部出现下列信息 3.快速比对:输入G,然后回车。在原比对文件所在文件夹内即可出现Gblocks 已经处理好的文件
.fas-gb文件可用Bioedit和DNAMAN打开。 打开.htm文件,可查看可视化的处理结果(如图) 4.主菜单: t. 指定的序列类型(可以是蛋白质,DNA或者密码子)。 输入一个t,回车。序列类型改为Condons 再输入一个t,回车。序列类型改为DNA(如此循环修改)
o. 打开一个文件。必须为 NBRF/PIR 或 FASTA 格式 ,序列长度不限。打开 NBRF/PIR-格式的序列时,在序列备注第一行要注明序列类型 如: >P1;byflorawz ------MEYLLQEYLPILVFLGMASALAIVLILAAAVIAVRN--PDPEKVSAYECGFNAF D-DARMKFDVRFYLVSILFIIFDLEVAFLFPWAVSFASLS-DVAFWGLMVFLAVLTVGFA YEWKKGALEWA----------------------* (fas格式则不需要,第一行直接为>byflorawz即可) 注意:在使用Glocks分析前,序列缺口必须先消除。 在将比对文件拖进改软件时,要去路径掉末尾的空格。 打开多个文件 :必须建立一个path文件。输入各个相关文件的路径,在安装好的文件包内可以看到一个"paths"范例,用word打开此文件,即可看到各个文件的所在路径(如图) 多条比对序列的处理:如果所有的比对文件的路径都在一个paths文件,且各个比对文件的序列条数,以及物种的顺序都是相同的,那么这些比对文件在最后的结果中可以连接起来。如果各个比对文件的序列条数不同,那么也可以一起处理,但是最后不能连接。 b. 显示 Block 限制性参数 (详情见下页). s. 显示保存菜单(详情见下页). g. 处理计算 q. 退出 5.限定性参数菜单
Fluke 77 Series IV_用户手册中文版(数字万用表)
? Model 77 Series IV Digital Multimeter 用户手册 September 2006 (Simplified Chinese) ? 2006 Fluke Corporation. All rights reserved. Printed in USA. All product names are trademarks of their respective companies.
生有限保 终证 Fluke 保证每一台 Fluke 20、70、80、170 和 180 系列的数字万用表在其使用寿命期间,均无材料和工艺上的缺陷。此处所谓的“使用寿命” 是指 Fluke 终止制造本产品后七年,但本保证期至少应为产品购买之日起十年。本项保证不包括保险丝、一次性电池以及因疏忽、误用、污 染、改装、意外或非正常状况下的使用或处理所造成的损坏(包括在产品规范以外进行测量所引起的故障或机械部件的正常损耗)。本项保证仅适用于原购买者并且不得转让。 自购买日起十年内,本保证也包括 LCD 显示屏。十年以后直到仪表的使用寿命终止,Fluke 将以收费的方式更换数字万用表的 LCD(根据当时该组件的成本价格收取费用)。 为了确定原始所有人及证明购买日期,请填妥并寄回产品所附上的注册卡,或在https://www.360docs.net/doc/1514372894.html,上注册产品。对于从 Fluke 授权销售处以适当的国际价格所购买而损坏的产品,Fluke 可选择免费修理、更换或以原购买价退款的方式处理该产品。若产品是从一个国家购买却被送到其它地区修理,Fluke 保留收取修理/更换零件的进口费用的权利。 如果发现产品损坏,请就近联系 Fluke 授权服务中心以取得同意退回产品的信息,然后把产品寄到该服务中心。同时附上问题描述,并预付 邮资和保险费(目的地离岸价格)。Fluke对运送途中发生的损坏不承担责任。对保修产品的修理或更换,Fluke 将负责回邮的运输费用。对非保修产品的修理,Fluke 会对修理费用作出估价并在征得您同意以后才进行修理。修理后,Fluke 将向您收取修理和回邮的运输费用。 本项保证是您唯一可以获得的补偿。除此以外,Fluke 不作其它任何明示或隐含的保证,例如适用于某一特殊目的的隐含保证。FLUKE 不应 对由于任何原因或推理所发生的任何特殊、间接、偶发或后续的损坏或损失承担赔偿责任,包括数据丢失。授权经销商无权代表 FLUKE 提供任何额外不同的保证。由于某些州或国家不允许将隐含保证或偶发或后续损失排除在外,或加以限制,本责任限制或许对您不适用。若本保证的任何条款被法庭或其它具有司法管辖权的决定者裁定为不适用或不可执行时,该项裁定将不影响其它条款的有效性或执行性。 Fluke Corporation Fluke Europe B.V. P.O. Box 9090 P.O. Box 1186 Everett, WA 98206-9090 5602 BD Eindhoven Netherlands U.S.A. The 请访问 Fluke 网站:https://www.360docs.net/doc/1514372894.html,. 仪表注册网址:https://www.360docs.net/doc/1514372894.html,. 2/02
fluke图文说明书
FLUKE使用说明书 学号:33012129 姓名:董强 一、特性概述 DTX 系列 CableAnalyzers 是一种坚固耐用的手持设备,可用于认证、排除故障、及记录铜缆和光缆布线安装。测试仪具有以下特性:? DTX-1800 可在不到 25 秒钟内依照 F 等级极限值( 600MHz)认证双绞线和同轴电缆布线,以及不到 10 秒钟的时间完成对第 6 类( Category 6)布线的认证。符合第 III 等级和第 IV 等级准确度要求。音频发生器功能帮助定位插孔及在检测到音频时自动开始“自动测试”。可选的光缆模块可用于认证多模及单模光缆布线。DTX Compact OTDR 模块可用于确定光缆中的反射事件和损耗事件的位置和特征。可选件 DTX-NSM 模块可以用来验证网络服务。可选件 DTX 10 G 组件包可用于针对 10G 以太网应用对第 6 类( Cat 6)和增强型第 6 类( Cat 6A)布线进行测试和认证。可于内部存储器保存至多 250 项 6 类自动测试结果,包含图形数据。DTX-1800及DTX-1200可于128 MB可拆卸内存卡上保存至多 4000 个自动测试结果,包含图形数据。可充电锂离子电池组可以连续运行至少 12 个小时。智能远端连可选的光缆模块可用于 Fluke NetworksOF-500 OptiFiber? 认证光时域反射计( OTDR)来进行损耗 / 长度认证。 LinkWare?软件可用于将测试结果上载至 PC 并创建专业水平的测试报告。“LinkWare Stats”选件产生缆线测试统计数据可浏览的图形报告。 二、福禄克测试仪初始化步骤: 1、充电:产品主机、辅机分别用电源适配器充电,直至电池显示灯转为绿色; 2、设置语言:操作:将FLUKE DTX系列产品主机旋钮转至“SET UP”档位,按右下角绿色按钮开机;使用↓箭头;选中第三条“Instrument setting ”(本机设置)按“ENTER”进入参数设置,首先使用→箭头,按一下;进入第二个页面,↓箭头选择最后一项Language按“ENTER进入; ↓箭头选择最后一项Chinese 按“ENTER”选择。将语言选择成中文后才进行以下操作。 3、自校准:取DTX-LT系列产品Cat 6A/Class EA 永久链路适配器,装在主机上,辅机装上Cat 6A/Class EA 通道适配器。然后将永久链路适配器末端插在Cat 6A/Class EA 通道适配器上;打开辅机电源,辅机自检后,“pass”灯亮后熄灭,显示辅机正常。 三、福禄克的基本特性
常见生物软件使用技巧汇集
常见生物软件使用技巧汇集 Q1.怎么查找序列保守区? A1:很多人查找序列保守区,一般通过序列多重比对后,肉眼判断序列保守区,但此法难免太主观,不具重复性,且选择的保守区无法受统计上的显著性检验。其实,实现这一目的,可以使用DnaSP--> “Analysis” -->“Conserved DNA regi on”...
Q2. 多个FASTA格式保存的单条序列如何批量快速合并为一个文件? A2 :一条条添加,费时费劲,且容易出错。解决的办法有两个:一是可以通过DNAMAN的“多重序列比对”后导出功能,即:添加序列所在的目录,或全选相关文件,进行多重比对,导出Clustal aln 文件,然后再转换为FASTA;二是使用我们2012年新开发的序列火枪手套件的“Seq Merger.exe” 即可快速实现合并。 Q3. 如何解决Clustalx 多重比对(*.Aln格式)后转为MEGA 格式时提示出错的问题? A3:检查所转换MEGA 的*.meg 文件最后几行内容是否有*号,全部删减之即可。因为Clustalx 多重比对后,程序会自动添加一致序列。
Q4. 为什么DNAMAN软件的很多功能菜单都显示无法使用? A4:DNAMAN软件的精华在于通道(Channel)的应用,遇到功能菜单呈灰度无法使用时,不妨将序列载入通道后再试试... Q5. 如何让多重比对美观显示又不占篇幅? A5:推荐使用Web Logo (https://www.360docs.net/doc/1514372894.html,/logo.cgi)或Sequence L ogo之类的在线工具处理。其实这类工具还有一个妙用-可用于设计简并引物,简并序列一目了然,如下图的第7个碱其位点,G/A=R。 Q6. 如何在多重比对序列的上方显示对应的蛋白质二级结构? A6:使用ESPript(http://espript.ibcp.fr/ESPript/cgi-bin/ESPript.cgi)对多重比对序列着色的同时,上传预测的蛋白质结构文件*.pdb 即可,效果如下图所示,详见《马铃薯Y病毒pipo基因的分子变异及结构特征分析》一文。具体操作方法可以参考《ESpript 美化多重比对序列图解(By Raindy) 》。
Fluke应用软件中文说明
Fluke View和Fluke Power Log软件使用手册 1.软件的安装: Fluke view软件的安装: 注:以下演示的安装过程以及以后的相关操作,均以 Power View(Version 3.31)软件的操作为实例,其它版本的相关操作也可以参考此版本。 a)将 Fluke view软件的安装光盘放入电脑的光盘驱动器中,光盘自动运行, 则出现如图 1 所示的安装向导界面: b)点击第二项“Fluke View Power Quality Analyzer V3.31”,出现如下窗口: c)点击“Install FlukeView PQ Analyzer V3.31”,出现如下窗口:
d)点击确定,此时软件被自动安装:
e)此对话框提示您选择软件的安装路径,您可以对此路径进行修改,在此安装 向导的界面中点击 “Next >” 按钮 f)安装向导将会转到下一步,如图所示,此对话框显示了该软件的版权许可,:
g)对话框将显示 Fluke View软件的安装过程,该过程以一个进度条来显示如下所示: h)安装完成后,安装向导则会自动弹出一个询问对话框,询问您是否阅读文件信息或者直接进入运行程序。
Fluke Power Log 软件的安装: 注:以下演示的安装过程以及以后的相关操作,均以 Power Log(Version 2.5)软件的操作为实例,其它版本的相关操作也可以参考此版本。 a)将 Fluke Power Log 软件的安装光盘放入电脑的光盘驱动器中,光盘自动运 行,则出现如图 1 所示的安装向导界面: 图 1. 软件的安装向导界面 b) 点击“Install Power Log V2.5”,出现如下窗口:
PAML 中文说明
PAML: 最大似然法分析系统发育Phylogenetic Analysis by Maximum Likelyhood 版本:4.3(2009年9月) Ziheng Y ang 马向辉翻译
1、概述 PAML (for Phylogenetic Analysis by Maximum Likelihood) 是一个用最大似然法分析蛋白质或DNA序列系统发育的一个程序包。 1.1 PAML 文件: 除了这个手册以外,以下资源也需要注意: PAML网站:https://www.360docs.net/doc/1514372894.html,/software/PAML.html。在这个网站上有PAML的下载以及编译程序; PAML FAQ页面:https://www.360docs.net/doc/1514372894.html,/software/pamlFAQs.pdf; PAML讨论群:https://www.360docs.net/doc/1514372894.html,/phpBB2/,在这里你可以提出你的问题,或者提出你发现的漏洞。 1.2 PAML 可以做些什么? PAML 的最新版本包含一下几个程序模块:baseml, basemlg, codeml, evolver, pamp, yn00, mcmctree, 以及chi2。其中最常用的模块的介绍可以参考杨子恒教授2007年发表的文章。模块运行中用到的计算、统计方法在杨子恒教授的书中有详细的介绍。模块的主要作用包括:计算以及检测系统发育树(baseml 和codeml); 计算复杂的碱基替代或者氨基酸替代模型中的参数,如不同位点间不同速率的模型或多个基因或者位点的综合分析模型(baseml和codeml); 用似然比例检测比较几个模型(baseml,codeml以及chi2); 用全局分子钟或者局部分子钟估算分歧时间(baseml和codeml); 用最大似然法重建祖先氨基酸、核苷酸序列以及密码子模型(baseml和codeml); 用蒙特卡洛模拟生成氨基酸、密码子
福禄克网络测线仪使用说明书
FLUKE网络测试仪器 说明书 班级:330910 姓名:赵景侃 学号:33091039
一、福禄克测试仪初始化步骤: 1、充电: 将Fluke dtx系列产品主机、辅机分别用电源适配器充电,直至电池显示灯转为绿色; 2、设置语言: 操作:将fluke dtx系列产品主机旋钮转至“SET UP”档位,按右下角绿色按钮开机;使用↓箭头;选中第三条“Instrument setting ”(本机设置)按“ENTER”进入参数设置,首先使用→箭头,按一下;进入第二个页面,↓箭头选择最后一项Language按“ENTER”进入; ↓箭头选择最后一项Chinese 按“ENTER”选择。将语言选择成中文后才进行以下操作。 3、自校准: 取fluke dtx系列产品Cat 6A/Class EA 永久链路适配器,装在主机上,辅机装上Cat 6A/Class EA 通道适配器。然后将永久链路适配器末端插在Cat 6A/Class EA 通道适配器上;打开辅机电源,辅机自检后,“PASS”灯亮后熄灭,显示辅机正常。“SPECIAL FUNCTIONS”档位,打开主机电源,显示主机、辅机软件、硬件和测试标准的版本(辅机信息只有当辅机开机并和主机连接时才显示),自测后显示操作界面,选择第一项“设置基准”后(如选错用“EXIT”退出重复),按“ENTER”键和“TEST”键开始自校准,显示“设置基准已完成”说明自校准成功完成。 二、设置福禄克测试仪基本参数 操作:将fluke dtx系列产品主机旋钮转至“SET UP”档位,使用“↑↓”来选择第三条“仪器值设置”,按“ENTER”进入参数设置,可以按“←→”翻页,用“↑↓”选择你所需设置的参数,按ENTER进入参数修改,用“↑↓”选择你所需采用的参数设置,选好后按ENTER选定并完成参数设置。 三、福禄克测试仪测试过程: ⒈根据需求确定测试极限值和电缆类型:通道测试还是永久链路测试?是CAT5E还是CAT6还是其他? ⒉关机后将测试标准对应的适配器安装在主机、辅机上,如选择“TIA CAT5E CHANNEL”通道测试标准时,主辅机安装“DTX-CHA002”通道适配器,如选择“TIA CAT6A PERM.LINK”永久链路测试标准时,主辅机各安装一个“DTX-PLA002”永久链路适配器。
Phylip中文使用说明
Phylip中文使用说 Introduction PHYLIP程序的运行 这些程序要按照一定的顺序来运行。前一个程序的输出作为下一个程序的输入。如何合理的组合这些程序也很关键。 在windows中,PHYLIP程序可通过双击程序的图标来启动,或是在命令行中输入程序的名称来启动。我们建议使用命令行方式,因为你也许能看到一些错误提示。它启动的方是:开始->所有程序->附件->命令提示符。 大部分PHYLIP程序运行方法相同。程序把infile作为默认输入文件,如果没有找到它将要求用户输入数据文件的名称。输出结果写在 outfile文件中。有些则写在outfile和outtree或plotfile中。 因为大部分程序使用默认的输入和输出文件名,所以在下一步的分析前,要重命名你想保存的文件。比如,你用Dnadist得到了距离矩阵(outfile),你还想试试不同的设置,那么再做矩阵计算前,你可以把outfile重命名为dnadist_outfile,或其它名称,这样你就能区别两次的结果了。 程序 重抽样工具 该程序生成一系列的特殊的随机样本,保存在outfile中。这些样本在后继的分
析中作为一个序列对文件,要设置选项M(use multiple datasets)。 Seqboot 生成随机样本,用bootstrap和jack-knife方法。 距离方法: 顺序使用这些程序。首先,用dandist或protdist程序计算序列比对结果的距离矩阵。接着这个矩阵被fitch、kitsch或 neighbor程序转换为树。Dandist 和protdist程序的输出文件是outfile。在运行fitch、kitsch或neighbor 前,outfile应该重命名为infile或另外的名字。fitch、kitsch和neighbor的输出文件是outfile和outtree。 Dnadist DNA距离矩阵计算器 Protdist 蛋白质距离矩阵计算器 Fitch 没有分子时钟的Fitch-Margoliash树 Kitsch 有分子时钟的Fitch-Margoliash树 Neighbor Neighbor-Joining和UPGMA树 基于字符的方法 这些程序读入一个序列对,它们的输出文件是outfile和outtree。 Dnapars DNA简约法 Dnapenny DNA简约法using branch-and-bound Dnaml DNA最大似然,无分子时钟
fluke说明书
福禄克F430系列 三相电能质量分析仪 更快、更安全、更详细地 定位和诊断的电能质量故障 技术参数 福禄克公司的F434 和F433三相电能质量分析仪可以帮助用 户定位、预测、防止和诊断配电系统的故障。对于那些维护 或排障三相配电系统的工作人员来说,这些简便易用的手持 工具是“必不可少”的。新的IEC和GB国标关于闪变和电能 质量方面的标准使得在对系统进行电能质量分析监测时有了 判断的依据。 ●记录三相系统中所有电能质量的参数。 ●直观的菜单,最大程度上减少所需的设置。 ●工业现场使用最高的安全等级。 ●四个电压通道和四个电流通道。 ●同时在所有相线上捕获波形数据。 ●系统监测:在一个仪表板上现实全部电能质量参数。 ●自动显示瞬态尖峰脉冲信号:不会漏掉任何一个事件。 ●自动趋势绘图(AutoTrend)功能:无需对记录进行设置! ●坚固的手持式设计。 ●使用镍氢(NiMH)电池组时,一次充电可使用7个小时。 ●将数据文件传输到PC,用于编写报告和利用FlukeView? 软件进行分析。 CAT IV 600 V 和CAT III 1000 V的安全等级 在设计时就考虑了保护用户和设备免受高压电击,福禄克 F430系列电能质量分析仪、附件和充电器都经过验证,满 足CAT IV 600 V和CAT III 1000 V环境下使用的严格的安 全标准。它们是同类别中第一款符合CAT IV安全等级的工 具,所以可以被用于低压配电系统中所有的电气连接和插 座。
快捷地观察趋势图 利用AutoTrend(自动趋势绘图)功能,可以快速地深入浏览电能质量参数随时间的变化。所显示的每一读数都被自动并且连续的进行记录,而不必设置触发限值或间隔时间,也无需手动启动记录过程。可以快速地观察所有相线和零线上电压、电流、频率、功率、谐波或闪变的趋势图;还可以使用光标和缩放功能分析趋势-而不会中断记 录。 AutoTrend功能在后台自动记录显示的所有参数。在数据和趋势图之间切换,以及使用光标和缩放功能分析测量结果,都不会中断记录过程。测量所有参数 利用福禄克F430系列电能质量分析仪可以测量电压和电流真有效值和峰值、频率、骤降和骤升、瞬态尖峰脉冲、断电、功率和功耗、谐波、间谐波、闪变和三相不平衡度等。 按照功能分组的简便菜单,可以快速地进行关键的测量。 可以分析高达50次的谐波,并根据IEC标准的要求测量和记录谐波总畸变率(THD)。 自动显示瞬态尖峰脉冲信号 当仪器每次检测到电压波形上的事件或异常信号时,就会产生触发并自动记录所有相线和零线上的电压和电流波形。当测试值超过特定的幅值时,分析仪将会自动触发。按这种方式可以捕获多达40个骤降、骤升、断电和瞬态尖峰脉冲事件;还可以观察高达6 kV、快达5微秒的瞬态尖峰脉冲电压。