指令设定一览表

指令设定一览表
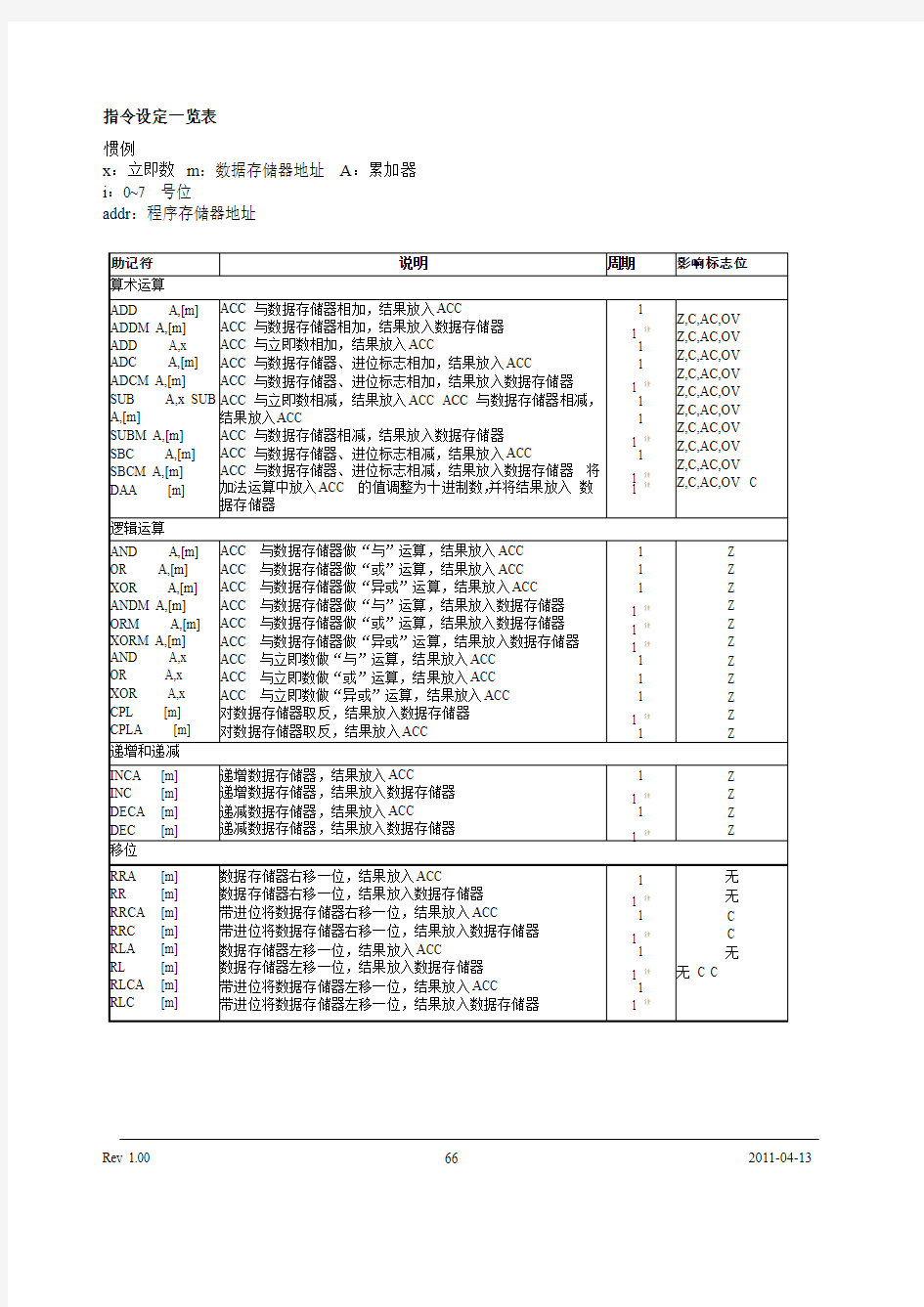
惯例
x:立即数m:数据存储器地址A:累加器
i:0~7 号位
addr:程序存储器地址
Rev 1.00 66 2011-04-13
注: 1. 对跳转指令而言,如果比较的结果牵涉到跳转即需2个周期,如果没有跳转发生,则只需一个周期即可。
2. 任何指令若要改变PCL的内容将需要2个周期来执行。
3. 对于“CLR WDT1”和“CLR WDT2”指令而言,TO和PDF标志位也许会受执行结果影响,“CLR WDT1” 和“CLR WDT2”被连续执行后,TO和PDF标志位会被清零,除此外TO和PDF标志位保持不变。
Rev 1.00 67 2011-04-13
指令定义
ADC A, [m] Add Data Memory to ACC with Carry
指令说明将指定数据存储器、累加器和进位标志位的内容相加后,把结果储存回累加器。功能表示ACC ← ACC + [m] + C
影响标志位OV , Z , AC , C
ADCM A, [m] Add ACC to Data Memory with Carry
指令说明将指定数据存储器、累加器和进位标志位的内容相加后,把结果储存回指定数据存储器。
功能表示[m] ←ACC + [m] + C
影响标志位OV , Z , AC , C
ADD A, [m] Add Data Memory to ACC
指令说明将指定数据存储器和累加器的内容相加后,把结果储存回累加器。功能表示ACC ←ACC + [m]
影响标志位OV , Z , AC , C
ADD A, x Add immediate data to ACC
指令说明将累加器和立即数的内容相加后,把结果储存回累加器。功能表示ACC ← ACC + x 影响标志位OV , Z , AC , C
ADDM A, [m] Add ACC to Data Memory
指令说明将指定数据存储器和累加器的内容相加后,把结果储存回指定数据存储器。功能表示[m] ←ACC + [m]
影响标志位OV , Z , AC , C
AND A, [m] Logical AND Data Memory to ACC
指令说明将存在累加器和指定数据存储器中的数据作AND的运算,然后把结果储存回累加器。功能表示ACC ← ACC“AND”[m]
影响标志位Z
AND A, x Logical AND immediate data to ACC
指令说明将存在累加器中的数据和立即数作AND的运算,然后把结果储存回累加器。功能表示ACC ← ACC“AND”x
影响标志位Z
ANDM A, [m] Logical AND ACC to Data Memory
指令说明将存在指定数据存储器和累加器中的数据作AND的运算,然后把结果储存回数据
存储器。
功能表示[m] ← ACC“AND”[m]
影响标志位Z
CALL addr Subroutine call
指令说明无条件地调用指定地址的子程序,此时程序计数器先加1获得下一个要执行的指令地址并压入堆栈,接着载入指定地址并从新地址继续执行程序,由于此指令需要
额外的运算,所以为一个2周期的指令。
Rev 1.00 68 2011-04-13
功能表示Stack ← Program Counter + 1
Program Counter ← addr
影响标志位None
CLR [m] Clear Data Memory
指令说明指定数据存储器中的每一位均清除为0。功能表示[m] ← 00H
影响标志位None
CLR [m].i Clear bit of Data Memory 指令说明指定数据存储器中的i位清除为0。功能表示[m].i ← 0
影响标志位None
CLR WDT Clear Watchdog Timer
指令说明将TO、PDF 标志位和WDT全都清零。功能表示WDT cleared
TO ← 0
PDF ← 0
影响标志位TO , PDF
CLR WDT1 Pre-clear Watchdog Timer
指令说明将TO、PDF 标志位和WDT全都清零,请注意此指令要结合CLR WDT2一起动作且必须交替重复执行此项指令而没有与CLR WDT2交替执行将无任何作用。
执行才有作用,
功能表示WDT cleared TO ← 0
PDF← 0
影响标志位TO , PDF
CLR WDT2 Pre-clear Watchdog Timer
指令说明将TO、PDF标志位和WDT全都清零,请注意此指令要结合CLR WDT1一起动作且重复执行此项指令而没有与CLR WDT1交替执行将无任何
必须交替执行才有作用,
作用。
功能表示WDT cleared TO ← 0
PDF← 0
影响标志位TO , PDF
CPL [m] Complement Data Memory
指令说明将指定数据存储器中的每一位取逻辑反,相当于从1变0或0变1。
——
功能表示[m] ←[ m ]
影响标志位Z
CPLA [m] Complement Data Memory with result in ACC
指令说明将指定数据存储器中的每一位取逻辑反,相当于从1变0或0变1,而结果被储存回累加器且数据存储器中的内容不变。
——
功能表示ACC←[ m]
影响标志位Z
Rev 1.00 69 2011-04-13
DAA [m] Decimal-Adjust ACC for addition with result in Data Memory
指令说明将存在累加器中的内容数值转换为BCD(二进制转成十进制)数值,如果低4位大于9或AC标志位被置位,则在低4位加上一个6,不然低4位的内容不变,如果高4
位大于9或C标志位被置位,则在高4位加上一个6,十进制的转换主要是依照累加
器和标志位状况,分别加上00H、06H、60H或66H,只有C标志位也许会被此指令影响,它会指出原始BCD 数是否大于100,并可以进行双精度十进制数相加。
功能表示[m] ← ACC + 00H 或
[m] ← ACC + 06H 或
[m] ← ACC + 60H 或
[m] ← ACC + 66H
影响标志位 C
DEC [m] Decrement Data Memory
指令说明将在指定数据存储器内的数据减1。功能表示[m] ← [m] – 1
影响标志位Z
DECA [m] Decrement Data Memory with result in ACC
指令说明将在指定数据存储器内的数据减1,把结果储存回累加器且数据存储器中的内容不变。功能表示ACC ← [m] – 1
影响标志位Z
HALT Enter power down mode
指令说明此指令停止程序的执行并且关闭系统时钟,但数据存储器和寄存器的内容仍被保留,WDT和预分频器(Prescaler)被清零,暂停标志位PDF被置位且WDT溢出标志位
TO 被清零。
功能表示TO ← 0 PDF ← 1
影响标志位TO , PDF
INC [m] Increment Data Memory
指令说明将指定数据存储器内的数据加1。功能表示[m] ← [m] + 1
影响标志位Z
INCA [m] Increment Data Memory with result in ACC
指令说明将指定数据存储器内的数据加1,把结果储存回累加器且数据存储器中的内容不变。功能表示ACC ← [m] + 1
影响标志位Z
JMP addr Jump unconditionally
指令说明程序计数器的内容被指定地址所取代,程序由新地址继续执行,当新地址被加载入时,必须插入一个空指令周期,所以此指令为2个周期的指令
功能表示Program Counter ← addr
影响标志位None
MOV A, [m] Move Data Memory to ACC
指令说明将指定数据存储器的内容复制到累加器中。功能表示ACC← [m]
影响标志位None
Rev 1.00 70 2011-04-13
MOV A, x Move immediate data to ACC 指令说明将立即数载入至累加器中。功能表示ACC ← x 影响标志位None
MOV [m], A Move ACC to Data Memory
指令说明将累加器的内容复制到指定数据存储器。功能表示[m] ← ACC
影响标志位None
NOP No operation
指令说明空操作,接下来顺序执行下一条指令。功能表示No operation
影响标志位None
OR A, [m] Logical OR Data Memory to ACC
指令说明将存在累加器和指定数据存储器中的数据作OR的运算,然后把结果储存回累加器。功能表示ACC ← ACC“OR”[m]
影响标志位Z
OR A, x Logical OR immediate data to ACC
指令说明将存在累加器中的数据和立即数作OR的运算,然后把结果储存回累加器。功能表示ACC ← ACC“OR”x
影响标志位Z
ORM A, [m] Logical OR ACC to Data Memory
指令说明将存在指定数据存储器和累加器中的数据作OR的运算,然后把结果储存回数据存储器。功能表示[m] ← ACC“OR”[m]
影响标志位Z
RET Return from subroutine
指令说明将堆栈区的数据取回至程序计数器,程序由取回的地址继续执行。功能表示Program Count er←Stack
影响标志位None
RET A, x Return from subroutine and load immediate data to ACC
指令说明将堆栈区的数据取回至程序计数器且累加器载入立即数,程序由取回的地址继续执行。功能表示Program Counter ← Stack ACC←x
影响标志位None
RETI Return from interrupt
指令说明将堆栈区的数据取回至程序计数器且中断功能通过EMI位重新被使能,EMI是控制中断使能的主中断位(寄存器INTC的第0位),如果在执行RETI指令之前还有中断未被响应,则这个中断将在返回主程序之前被响应。
功能表示Program Counter ←Stack EMI ← 1
影响标志位None
Rev 1.00 71 2011-04-13
RL [m] Rotate Data Memory left
指令说明将指定数据存储器的内容向左移1个位,且第7位移回第0 位。功能表示[m].(i+1) ← [m].i ; (i = 0~6)
[m].0 ← [m].7
影响标志位None
RLA [m] Rotate Data Memory left with result in ACC
指令说明将指定数据存储器的内容向左移1个位,且第7位移回第0位,而移位的结果储存回累加器且数据存储器中的内容不变。
功能表示ACC.(i+1) ← [m].i ; (i = 0~6)
ACC.0 ←[m].7
影响标志位None
RLC [m] Rotate Data Memory Left through Carry
指令说明将指定数据存储器的内容连同进位标志位向左移1个位,第7位取代进位位且原本的进位标志位移至第0位。
功能表示[m].(i+1) ← [m].i ; (i = 0~6) [m].0 ← C
C ← [m].7
影响标志位 C
RLCA [m] Rotate Data Memory left through Carry with result in ACC
指令说明将指定数据存储器的内容连同进位标志位向左移1个位,第7位取代进位位且原本的进位标志位移至第0位,而移位的结果储存回累加器且数据存储器中的内容不变。
功能表示ACC.(i+1) ← [m].i ; (i = 0~6) ACC.0 ← C
C ← [m].7
影响标志位 C
RR [m] Rotate Data Memory right
指令说明将指定数据存储器的内容向右移1个位,且第0位移回第7位。功能表示[m].i ← [m].(i+1) ; (i = 0~6)
[m].7 ← [m].0
影响标志位None
RRA [m] Rotate Data Memory right with result in ACC
指令说明将指定数据存储器的内容向右移1个位,且第0位移回第7位,而移位的结果储存回累加器且数据存储器中的内容不变。
功能表示ACC.i ← [m].(i+1) ; (i = 0~6)
ACC.7 ← [m].0
影响标志位None
RRC [m] Rotate Data Memory right through Carry
指令说明将指定数据存储器的内容连同进位标志位向右移1个位,第0位取代进位位且原本的进位标志位移至第7位。
功能表示[m].i ← [m].(i+1) ; (i = 0~6) [m].7← C
C ← [m].0
影响标志位 C
Rev 1.00 72 2011-04-13
RRCA [m] Rotate Data Memory right through Carry with result in ACC
指令说明将指定数据存储器的内容连同进位标志位向右移1个位,第0位取代进位位且原本的进位标志位移至第7位,而移位的结果储存回累加器且数据存储器中的内容不变。
功能表示ACC.i ← [m].(i+1) ; (i = 0~6) ACC.7 ← C
C ← [m].0
影响标志位 C
SBC A, [m] Subtract Data Memory from ACC with Carry
指令说明将累加器中的数据与指定数据存储器内容和进位标志位的反相减,把结果储存回累加器。如果结果为负,C标志位清除为0,反之结果为正或0,C标志位设置为1。
功能表示ACC ← ACC – [m] –C
影响标志位OV , Z , AC , C
SBCM A, [m] Subtract Data Memory from ACC with Carry and result in Data Memory
指令说明将累加器中的数据与指定数据存储器内容和进位标志位的反相减,把结果储存回数据存储器。如果结果为负,C标志位清除为0,反之结果为正或0,C标志位设置为1。
功能表示[m] ← ACC – [m] –C
影响标志位OV , Z , AC , C
SDZ [m] Skip if Decrement Data Memory is 0
指令说明将指定数据存储器的内容先减去1后,如果结果为0,则程序计数器再加1跳过下一条指令,由于取得下一指令时会要求插入一个空指令周期,所以此指令为2个周期的指令。如果结果
不为0,则程序继续执行下面的指令。
功能表示[m] ← [m] – 1 Skip if [m] = 0
影响标志位None
SDZA [m] Skip if decrement Data Memory is zero with result in ACC
指令说明将指定数据存储器的内容先减去1后,如果结果为0,则程序计数器再加1跳过下一条指令,此结果会被储存回累加器且指定数据存储器中的内容不变,由于取得下一
指令时会要求插入一个空指令周期,所以此指令为2个周期的指令。如果结果不为0,
则程序继续执行下面的指令。
功能表示ACC ← [m] – 1
Skip if ACC = 0
影响标志位None
SET [m] Set Data Memory
指令说明将指定数据存储器的每一个位置位为1。功能表示[m] ← FFH
影响标志位None
SET [m].i Set bit of Data Memory
指令说明将指定数据存储器的第i位置位为1。功能表示[m].i ← 1
影响标志位None
SIZ [m] Skip if increment Data Memory is 0
指令说明将指定数据存储器的内容先加上1后,如果结果为0,则程序计数器再加1 跳过下一条指令,由于取得下一指令时会要求插入一个空指令周期,所以此指令为2个周期的
指令。如果结果不为0,则程序继续执行下面的指令。
功能表示[m] ← [m] + 1 Skip if [m] = 0
影响标志位None
SIZA [m] Skip if increment Data Memory is zero with result in ACC
指令说明将指定数据存储器的内容先加上1后,如果结果为0,则程序计数器再加1跳过下一条指令,此结果会被储存回累加器且指定数据存储器中的内容不变,由于取得下一指令时会要求插入一个
空指令周期,所以此指令为2个周期的指令。如果结果不为0,则程序继续执行下面的指令。
功能表示ACC← [m] + 1
Skip if ACC = 0
影响标志位None
SNZ [m].i Skip if bit i of Data Memory is not 0
指令说明如果指定数据存储器的第i位不为0,则程序计数器再加1跳过下一条指令,由于取得下一指令时会要求插入一个空指令周期,所以此指令为2个周期的指令。如果结果不为0,程序继续执行
下面的指令。
功能表示Skip if [m].i ≠ 0
影响标志位None
SUB A, [m] Subtract Data Memory from ACC
指令说明将累加器中内容减去指定数据存储器的数据,把结果储存回累加器。如果结果为负,C标志位清除为0,反之结果为正或0,C标志位设置为1。功能表示ACC ← ACC – [m] 影响标志位OV , Z , AC , C
SUBM A, [m] Subtract Data Memory from ACC with result in Data Memory
指令说明将累加器中内容减去指定数据存储器的数据,把结果储存回数据存储器。如果结果为负,C 标志位清除为0,反之结果为正或0,C标志位设置为1。
功能表示[m] ← ACC – [m]
影响标志位OV , Z , AC , C
SUB A, x Subtract immediate Data from ACC
指令说明将累加器中内容减去立即数,把结果储存回累加器。如果结果为负,C标志位清除为0,反之结果为正或0,C标志位设置为1。
功能表示ACC ← ACC – x
影响标志位OV , Z , AC , C
SWAP [m] Swap nibbles of Data Memory
指令说明将指定数据存储器的低4位与高4位互相交换。功能表示[m].3 ~ [m].0 ?[m].7 ~ [m].4
影响标志位None
SWAPA [m] Swap nibbles of Data Memory with result in ACC
指令说明将指定数据存储器的低4位与高4位互相交换,然后把结果储存回累加器且数据存储器的内容不变。
功能表示ACC.3 ~ ACC.0 ← [m].7 ~ [m].4
ACC.7 ~ ACC.4 ← [m].3 ~ [m].0
影响标志位None
SZ [m] Skip if Data Memory is 0
指令说明如果指定数据存储器的内容为0,则程序计数器再加1跳过下一条指令,由于取得下一指令时会要求插入一个空指令周期,所以此指令为2个周期的指令。如果结果不为0,程序继续执行
下面的指令。
功能表示Skip if [m] = 0
影响标志位None
SZA [m] Skip if Data Memory is 0 with data movement to ACC
指令说明将指定数据存储器的内容复制到累加器,如果值为0,则程序计数器再加1跳过下一条指令,由于取得下一指令时会要求插入一个空指令周期,所以此指令为2个周期的指令。如果结果不为0,程序继续执行下面的指令。
功能表示ACC ← [m]
Skip if [m] = 0
影响标志位None
SZ [m].i Skip if bit i of Data Memory is 0
指令说明如果指定数据存储器第i 位为0,则程序计数器再加1 跳过下一条指令,由于取得下一指令时会要求插入一个空指令周期,所以此指令为2个周期的指令。如果结果不为0,程序继续执行下面的指令。功能表示Skip if [m].i = 0
影响标志位None
TABRDC [m] Read table (current page ) to TBLH and Data Memory
指令说明将表格指针TBLP所指的程序代码低字节(当前页)移至指定数据存储器且将高字节移至TBLH。
功能表示[m] ←程序代码(低字节)
TBLH ←程序代码(高字节)
影响标志位None
TABRDL [m] Read table ( last page ) to TBLH and Data Memory
指令说明将表格指针TBLP所指的程序代码低字节(最后一页)移至指定数据存储器且将高字节移至TBLH。
功能表示[m] ← 程序代码(低字节)
TBLH ←程序代码(高字节)
影响标志位None
XOR A, [m] Logical XOR Data Memory to ACC
指令说明将存在累加器和指定数据存储器中的数据作XOR的运算,然后把结果储存回累加器。功能表示ACC ← ACC“XOR”[m]
影响标志位Z
XORM A, [m] Logical XOR ACC to Data Memory
指令说明将存在指定数据存储器和累加器中的数据作XOR的运算,然后把结果储存回数据存储器。功能表示[m] ← ACC“XOR”[m]
影响标志位Z
XOR A, x Logical XOR immediate data to ACC
指令说明将存在累加器中的数据和立即数作XOR的运算,然后把结果储存回累加器。功能表示ACC ← ACC“XOR”x
影响标志位Z
fastcopy命令行参数解释
fastcopy命令行参数解释 2011-06-17 16:05 fastcopy是一款复制删除文件的工具,为什么要用它,因为他比系统的复制删除要快,特别是文件超多,超大的情况下. FASTCOPY可以在WINDOWS下使用,也可以在DOS下运行命令 下面是FASTCOPY命令行方式: fastcopy.exe [/参数] file1 file2 ... [/to=dest_dir] 基本参数: /cmd=(noexist_only|diff|update|sync|force_copy|move|delete) noexist_only 复制-如重名,则不复制 diff 复制-如重名,则公复制大小与时间不同的文件 update 复制-如重名,则复制较新的源文件 sync 同步-如重名,则复制大小与时间不同的文件 force_copy 复制-覆盖重名文件 move 移动-覆盖重名文件并强行删除源文件 delete 删除-强行删除指定的文件与目录 /auto_close 拷贝结束后,自动关闭 /force_close 如果拷贝结束后,发生错误,也强行关闭 /open_window 显示Fastcopy窗口界面 /estimate 预测拷贝完成时间 /no_exec 对Fastcopy窗口界面设置参数,但是不执行 /no_confirm_del 当用/delete参数时,不显示确认界面 /error_stop 发生错误时中止动作(在/error_stop=FALSE抑制)
/bufsize=N(MB) 用MB单位来指定缓冲器大小 /speed=(full|autoslow|9-1(90%-10%)|suspend) 速度限制 /log 输出记录文件(fastcopy.log) (在/log=FALSE抑制) /skip_empty_dir 启用过滤,不拷贝空文件夹(在/skip_empty_dir=FALSE抑制) /job=任务名称执行指定的任务 /force_start 在其他的FastCopy拷贝,并且正执行的时候,执行立即也(在/force_start=FALSE抑制) /disk_mode=(auto|same|diff) 指定自动/恒等性/其他HDD方式。(债务不履行声明:) auto) /include="..." 指定Include过滤器 /exclude="..." 指定Exclude过滤器 /overwrite_del 在删除文件之前,删掉方式时,重新取名给重复&,使复原无效(在/overwrite_del=FALSE抑制) /acl 拷贝存取支配清单(ACL)(只NTFS有效)(在/acl=FALSE抑制) /stream 拷贝副其次线流(只NTFS有效)(在/stream=FALSE抑制) /junction 复制junction·mount point(不是属下)junction·mount point自己(/junction=FALSE 拷贝属下) /symlink 用象征性连接(而不是本质)拷贝象征性连接其本身(在/symlink=FALSE 拷贝本质) [/to=dest_dir] 目标磁盘 fastcopy.exe [/options] file1 file2 ... [/to=dest_dir] Please use space character(' ') as separator(not semicolon). If filename contains space character, please enclose with dobule quotation marks. Ex) fastopy.exe C:\Windows "C:\Program Files" /to="D:\Backup Folder\" 使用"做为分隔符 c:\Progra~1\FastCopy\FastCopy.exe /cmd=sync /auto_close /open_window "\\ztsv-xs\e\网络游戏\永恒之塔" /to="e:\games\online\"
USS指令说明
USS-INT指令详解 EN:初始化程序USS_INIT 只需在程序中执行一个周期就能改变通信口的功能,以及进行其他一些必要的初始设置,因此可以使用SM0.1 或者沿触发的接点调用USS_INIT 指令; Mode:模式选择,执行USS_INIT 时,Mode 的状态决定是否在Port 0 上使用USS 通信功能; = 1 设置Port 0 为USS 通信协议并进行相关初始化 0 恢复Port 0 为PPI 从站模式 Baud:USS 通信波特率。此参数要和变频器的参数设置一致; = 2400 2400 bit/s 4800 4800 bit/s 9600 9600 bit/s 19200 19200 bit/s 38400 38400 bit/s 57600 57600 bit/s 115200 115200 bit/s Active:此参数决定网络上的哪些USS 从站在通信中有效。详见下面的说明;Done:初始化完成标志 Error:初始化错误代码 孤陋寡闻,我从来没看过有DRV-CTRL这条指令 USS-CTRL指令详解 EN:使用SM0.0 使能USS_CTRL 指令 RUN:驱动装置的启动/停止控制 = 0 停止 1 运行 此停车是按照驱动装置中设置的斜坡减速指电机停止
OFF2:停车信号2。此信号为“1"时,驱动装置将封锁主回路输出,电机自由停车 OFF3:停车信号3。此信号为”1"时,驱动装置将快速停车 F_ACK:故障确认。当驱动装置发生故障后,将通过状态字向USS 主站报告;如果造成故障的原因排除,可以使用此输入端清除驱动装置的报警状态,即复位。注意这是针对驱动装置的操作。 DIR:电机运转方向控制。其“0/1”状态决定运行方向 Drive:驱动装置在USS 网络上的站号。从站必须先在初始化时激活才能进行控制 Type:向USS_CTRL 功能块指示驱动装置类型 = 0 MM 3 系列,或更早的产品 1 MM 4 系列,SINAMICS G 110 Speed_SP:速度设定值。速度设定值必须是一个实数,给出的数值是变频器的频率范围百分比还是绝对的频率值取决于变频器中的参数设置(如MM 440 的P2009) Resp_R:从站应答确认信号。主站从USS 从站收到有效的数据后,此位将为“1"一个程序扫描周期,表明以下的所有数据都是最新的 Error:错误代码。0 = 无出错。其他错误代码请参考 Status:驱动装置的状态字。此状态字直接来自驱动装置的状态字,表示了当时的实际运行状态 详细的状态字信息意义请参考相应的驱动装置手册。 Speed:驱动装置返回的实际运转速度值,实数。是否频率值跟随设定值的规格化设定 Run_EN:运行模式反馈,表示驱动装置是运行(为1)还是停止(为0) D_Dir:指示驱动装置的运转方向,反馈信号 Inhibit:驱动装置禁止状态指示(0 - 未禁止,1 - 禁止状态)。禁止状态下驱
库卡工业机器人运动指令入门知识学员必备)
库卡工业机器人运动指令的入门知识问?学完了KUKA机器人的运动指令后,可以了解到哪些? 答(1)通过对机器人几种基本运动指令的学习,能够熟练掌握机器人各种轨迹运动的相关编程操作 (2)通过学习PTP运动指令的添加方法,能够掌握机器人的简单编程 机器人的运动方式: 机器人在程序控制下的运动要求编制一个运动指令,有不同的运动方式供运动指令的编辑使用,通过制定的运动方式和运动指令,机器人才会知道如何进行运动,机器人的运动方式有以下几种: (1)按轴坐标的运动(PTP:Point-toPoint,即点到点) (2)沿轨迹的运动:LIN直线运动和CIRC圆周运动 (3)样条运动:SPLINE运动 点到点运动 PTP运动是机器人沿最快的轨道将TCP从起始点引至目标点,这个移动路线不一定是直线,因为机器人轴进行回转运动,所以曲线轨道比直线轨道运动更快。此轨迹无法精确预知,所以在调试及试运行时,应该在阻挡物体附近降低速度来测试机器人的移动特性。线性运动
线性运动是机器人沿一条直线以定义的速度将TCP引至目标点。在线性移动过程中,机器人转轴之间进行配合,是工具或工件参照点沿着一条通往目标点的直线移动,在这个过程中,工具本身的取向按照程序设定的取向变化。 圆周运动 圆周运动是机器人沿圆形轨道以定义的速度将TCP移动至目标点。圆形轨道是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以精确定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具尖端取向的变化顺应与持续的移动轨迹。 样条运动 样条运动是一种尤其适用于复杂曲线轨迹的运动方式,这种轨迹原则上也可以通过LIN 运动和CIRC运动生成,但是相比下样条运动更具有优势。 创建以优化节拍时间的运动(轴运动) 1?PTP运动 PTP运动方式是时间最快,也是最优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位置。 2?轨迹逼近 为了加速运动过程,控制器可以CONT标示的运动指令进行轨迹逼近,轨迹逼近意味着将不精确到达点坐标,只是逼近点坐标,事先便离开精确保持轮廓的轨迹。
指令系统练习与答案
计算机原理 指令系统练习与答案 一、填空题 1 、一个完善的指令系统应满足以下4 个方面的要求,它们是:完备性、有效性、规整性和兼容性。 2 、一条完整的指令是由操作码和地址码(操作数)两部分信息组成的。 3 、指令中的地址码字段包括源操作数的地址和操作结果数的地址(目的操作数的地址),前者用语指明操作数的存放处,后者用语存放运算的结果。 4 、指令格式按地址码部分的地址个数可以分为零地址指令格式、一地址指令格式、二地址指令格式和三地址指令格式。 5 、常见的操作码方法有定长操作码和扩展操作码。 6 、逻辑运算指令包括逻辑乘(与)、逻辑加(或)、逻辑非(求反)和异或(按位加)等操作。 二、单项选择题 1 、直接、间接、立即这3 种寻址方式指令的执行速度有快到慢的排序是(C ) A .直接、立即、间接 B .直接、间接、立即 C .立即、直接、间接 D .立即、间接、直接 2 、指令系统中采用不同寻址方式的目的是(B ) A .实现存储程序和程序控制 B .缩短指令长度,扩大寻址空间,提高编程灵活性 C .可以直接访问外存 D .提高扩展操作码的可能并降低指令译码难度 3 、一地址指令中为了完成两个数的算术运算,除地址码指明的一个操作数外,另一个数常采用(C ) A .堆栈寻址方式 B .立即寻址方式 C .隐含寻址方式 D .间接寻址方式 4 、对某个寄存器中操作数的寻址方式称为(C )寻址方式 A .直接 B .间接 C .寄存器直接 D .寄存器间接 5 、寄存器间接寻址方式中,操作数在(B ) A .通用寄存器 B .主存单元 C .程序计数器 D .外存 6 、变址寻址方式中,操作数的有效地址等于(C ) A .基址寄存器内容加上偏移量 B .堆栈指示器内容加上偏移量 C .变址寄存器内容加上偏移量 D .程序计数器内容加上偏移量 7 、扩展操作码是(D ) A .操作码字段中用来进行指令分类的代码 B .指令格式中不同字段设置的操作码 C .操作码字段外用来操作字段的代码 D .一种指令优化技术,即让操作码的长度随地址数的变化而变化 8 、下面关于汇编语言的叙述中,不恰当的是(D ) A .对程序员的训练要求来说,需要硬件知识 B .汇编语言对机器的依赖性强 C .用汇编语言编写程序的难度比高级语言大 D .用汇编语言编写的程序执行速度比高级语言慢 9 、能够改变程序执行顺序的是(D ) A .数据传送类指令 B .移位操作类指令 C .输入/ 输出类指令 D .条件/ 无条件转移类指令 10 、以下的(D )不能支持数值处理
库卡工业机器人运动指令入门知识 学员必备
库卡工业机器人运动指令的入门知识 问?学完了的运动指令后,可以了解到哪些? 答(1)通过对机器人几种基本运动指令的学习,能够熟练掌握机器人各种轨迹运动的相关编程操作 (2)通过学习PTP运动指令的添加方法,能够掌握机器人的简单编程 机器人的运动方式: 机器人在程序控制下的运动要求编制一个运动指令,有不同的运动方式供运动指令的编辑使用,通过制定的运动方式和运动指令,机器人才会知道如何进行运动,机器人的运动方式有以下几种: (1)按轴坐标的运动(PTP:Point-toPoint,即点到点) (2)沿轨迹的运动:LIN直线运动和CIRC圆周运动 (3)样条运动:SPLINE运动 点到点运动
PTP运动是机器人沿最快的轨道将TCP从起始点引至目标点,这个移动路线不一定是直线,因为机器人轴进行回转运动,所以曲线轨道比直线轨道运动更快。此轨迹无法精确预知,所以在调试及试运行时,应该在阻挡物体附近降低速度来测试机器人的移动特性。 线性运动
线性运动是机器人沿一条直线以定义的速度将TCP引至目标点。在线性移动过程中,机器人转轴之间进行配合,是工具或工件参照点沿着一条通往目标点的直线移动,在这个过程中,工具本身的取向按照程序设定的取向变化。 圆周运动 圆周运动是机器人沿圆形轨道以定义的速度将TCP移动至目标点。圆形轨道是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以精确定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具尖端取向的变化顺应与持续的移动轨迹。 样条运动
样条运动是一种尤其适用于复杂曲线轨迹的运动方式,这种轨迹原则上也可以通过LIN运动和CIRC运动生成,但是相比下样条运动更具有优势。 创建以优化节拍时间的运动(轴运动) 1?PTP运动 PTP运动方式是时间最快,也是最优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位置。 2?轨迹逼近 为了加速运动过程,控制器可以CONT标示的运动指令进行轨迹逼近,轨迹逼近意味着将不精确到达点坐标,只是逼近点坐标,事先便离开精确保持轮廓的轨迹。 PTP运动的轨迹逼近是不可预见的,相比较点的精确暂停,轨迹逼近具有如下的优势: (1)由于这些点之间不再需要制动和加速,所以运动系统受到的磨损减少。(2)节拍时间得以优化,程序可以更快的运行。 创建PTP运动的操作步骤 (1)创建PTP运动的前提条件是机器人的运动方式已经设置为T1运行方式,并且已经选定机器人程序。
1一条指令通常由哪两部分组成
1.一条指令通常由哪两部分组成?指令的操作码一般有哪几种组织方式?各自应用在什么场合?各自的优缺点是什么? 答案 一条指令由操作码和操作数地址码两部分组成。对操作码的组织与编码有以下三种: (1)定长的操作码的组织方案 优点:计算机的硬件设计简单,指令译码和执行速度快。 缺点:当指令数量增多、指令字单独为操作码划分出固定的多位后,留给表示操作数 地址的位数就会严重不足。 适用于字长较长的计算机系统,如32位或32位以上。 (2)变长的操作码的组织方案 优点:在比较短的指令字中,既能表示出比较多的指令条数又能尽量满足操作数地址 的要求。 缺点:计算机的硬件设计复杂,指令译码和执行速度较慢。 适用于字长较短的计算机系统,如16位或16位以下。 (3)操作码字段与操作数地址有所交叉的方案 优点:在比较短的指令字中,既能表示出比较多的指令条数又能尽量满足操作数地址 的要求。操作码不再集中在指令字的最高位,而是与表示操作数地址的字段有所交叉。 缺点:计算机的硬件设计复杂,指令译码和执行速度较慢。 这种方案不很常用。 2.什么是形式地址?简述对变址寻址、相对寻址、基地址寻址应在指令中给出些什么信息?如何得到相应的实际(有效)地址?各自有什么样的主要用法?答案
表示在指令中的操作数地址称为形式地址。 (1)变址寻址:应在指令中给出一个数值(称为变址偏移量)及一个寄存器(称为 变址寄存器)的编号。 实际地址(又称有效地址)=变址寄存器的内容+变址偏移量 主要用于处理数组型数据。 (2)相对寻址:应在指令中给出一个数值(称为相对寻址偏移量) 实际地址(又称有效地址)=程序计数器PC的内容+相对寻址偏移量 主要用于相对转移指令。 (3)基地址寻址:应在指令中给出一个寄存器(称为基址寄存器)的编号。 实际地址(又称有效地址)=程序中的地址+基址寄存器 主要用于多道程序或浮动地址程序定位存储器空间。 3.简述计算机的控制器的功能和基本组成,微程序的控制器和组合逻辑的控制器在组成和运行原理方面的相同、不同之处表现在哪里? 答案 控制器的功能是自动连续地执行指令序列,并依据当前正在执行的指令和它所处的 执行步骤,提供出在这一时刻整机各部件要用到的控制信号。 控制器的基本组成包括 (1)程序计数器(PC) (2)指令寄存器(IR) (3)脉冲源、启停控制逻辑、指令执行的步骤标记线路 (4)全部时序控制信号产生部件
习题(指令与编程及答案)
一.单项选择题 1. ORG 0003H LJMP 2000H ORG 000BH LJMP 3000H 2. 当CPU响应外部中断0后,PC的值是()。 A.0003H B. 2000H C. 000BH D. 3000H 3. MCS-51的相对转移指令的最大负跳距离为()。 A.2KB B. 128B C.127B D. 256B 4. 以下运算中对溢出标志0V没有影响或不受影响的运算是()。 A.逻辑运算 B. 符号数加减运算 C. 比较数据大小运算 D. 除法运算 5. 产生PSEN信号的指令是()。 A . MOVX A ,@DPTR B. MOVX @DPTR, A C. MOVC A , @A+PC D. MOVX A, @A+DPTR 6. MOVX A , @DPTR指令中的源操作数的寻址方式是()。 A.寄存器寻址 B.寄存器间接寻址 C.直接寻址 D.立即寻址 7. 将MCS-51的工作寄存器置成3区的指令是()。 A. MOV PSW , #13H B.MOV PSW , #18H C. SETB PSW.4 ,CLR PSW.3 D.SETB PSW.3 ,CLR PSW.4 8. 指令AJMP的跳转范围是()。 A .256 B B.1KB C.2KB D.64KB 9. 6264芯片是()。 A.E2PROM B.RAM C .Flash ROM D .EPROM 10. 下面那条指令产生WR信号()。 A.MOVX A , @DPTR B.MOVC A , @A+DPTR C.MOVC A , @A+PC D.MOVX @DPTR , A 11. 执行LCALL 4000H指令时,MCS-51所完成的操作是()。 A.保护PC B.保护现场 C.4000H →PC D.PC+3入栈,4000H → PC 12. 下列指令中可能改变Cy的有()。
(完整版)KUKA简单操作说明书
KUKA简单操作说明书 一、KUKA控制面板介绍 1、示教背面 在示教盒的背面有三个白色和一个绿色的按钮。三个白色按钮是使能开关(伺服上电),用在T1和T2模式下。不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人可以运动。绿色按钮是启动按钮。 Space Mouse为空间鼠标又称6D鼠标。 2、示教盒正面
急停按钮: 这个按钮用于紧急情况时停止机器人。一旦这个按钮被按下,机器人的伺服电下,机器人立即停止。 需要运动机器人时,首先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器人。 伺服上电: 这个按钮给机器人伺服上电。此按钮必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用。 伺服下电: 这个按钮给机器人伺服上电。
模式选择开关: T1模式:手动运行机器人或机器人程序。在手动运行机器人或机器人程序时,最大速度都为250mm/s。 T2模式:手动运行机器人或机器人程序。在手动运行机器人时,最大速度为250mm/s。在手动运行机器人程序时,最大速度为程序中设定的速度。 本地自动:通过示教盒上的启动按钮可以使程序自动运行。 外部自动:必须通过外部给启动信号才能自动执行程序。 退出键: 可以退出状态窗口、菜单等。 窗口转换键: 可以在程序窗口、状态窗口、信息窗口之间进行焦点转换。当某窗口背景呈蓝色时,表示此窗口被选中,可以对这个窗口进行操作,屏幕下方的功能菜单也相应改变。 暂停键: 暂停正在运行的程序。按“向前运行”或“向后运行”重新启动程序。 向前运行键: 向前运行程序。在T1和T2模式,抬起此键程序停止运行,机器人停止。 向后运行键: 向后运行程序。仅在T1和T2模式时有用。 回车键: 确认输入或确认指令示教完成。 箭头键: 移动光标。
LINUX常用命令及参数说明_v1.0
LINUX常用命令 1. cd (3) 2. pwd (3) 3. ls (3) 4. passwd (4) 5. who (4) 6. cat (5) 7. mkdir (5) 8. rmdir (6) 9. chmod (6) 10. chown (7) 11. chgrp (7) 12. touch (8) 13. cp (9) 14. mv (9) 15. rm (9) 16. find (10) 17. grep (10) 18. more (11) 19. less (11) 20. head (11) 21. tail (12) 22. cut (12) 23. at (12) 24. crontab (13) 25. sleep (14) 26. kill (14) 27. ps (15) 28.pstree (15) 29. top (16) 30. expr (16) 31. locate (17) 32. split (17) 34. man,info (19) 35. alias (19) 36. unalias (19) 37. clear (19) 38. ssh (19) 39. ll (20) 40. awk (20) 41. sed (21) 42. tar (22)
43. scp (22) 44. netstat (23)
1. cd 格式: cd [dirName] 说明: 变换工作目录至dirName。其中dirName可为绝对路径或相对路径。若目录命令省略,则变换至使用者登录时所在的目录(home directory )。另外,"~" 也表示为home directory 的意思,"." 则是表示当前所在的目录,".." 则表示当前目录位置的上一层目录。范例: 1. 跳到当前目录的子目录(如:usr/bin)当中: cd /usr/bin 2. 跳到自己的home directory : cd ~ (或cd ) 3. 跳到当前目录的上上两层: cd ../.. 4. 跳到父目录下的另外一个目录(如:conf): cd ../conf 2. pwd 格式: pwd 说明: 显示当前所在目录 3. ls 格式: ls [-alrtAFR] [name...] 说明: 显示指定工作目录下之内容(列出目前工作目录所含之档案及子目录)。 -a 显示所有文件及目录(包括"."开头的文件) -l 除文件名外,还将文件类型、权限、拥有者、文件大小等信息详细列出 -r 将文件以相反次序显示(原定依英文字母次序) -t 将文件依建立时间之先后次序列出 -A 同-a ,但不列出"." (当前目录) 及".." (父目录) -F 在列出的文件命令后加一符号;例如可执行文件则加"*", 目录则加"/" -R 若目录下有文件,则以下之档案亦皆依序列出 范例: 1. 列出当前工作目录下所有命令是s 开头的文件,愈新的排愈后面:
linux_cp命令参数及用法详解
cp (复制档案或目录) [root@linux ~]# cp [-adfilprsu] 来源档(source) 目的档(destination) [root@linux ~]# cp [options] source1 source2 source3 …. directory 参数: -a :相当于-pdr 的意思; -d :若来源文件为连结文件的属性(link file),则复制连结文件属性而非档案本身; -f :为强制(force) 的意思,若有重复或其它疑问时,不会询问使用者,而强制复制; -i :若目的档(destination)已经存在时,在覆盖时会先询问是否真的动作! -l :进行硬式连结(hard link) 的连结档建立,而非复制档案本身; -p :连同档案的属性一起复制过去,而非使用预设属性; -r :递归持续复制,用于目录的复制行为; -s :复制成为符号连结文件(symbolic link),亦即『快捷方式』档案; -u :若destination 比source 旧才更新destination ! 最后需要注意的,如果来源档有两个以上,则最后一个目的文件一定要是『目录』才行! 范例: 范例一:将家目录下的.bashrc 复制到/tmp 下,并更名为bashrc [root@linux ~]# cd /tmp [root@linux tmp]# cp ~/.bashrc bashrc [root@linux tmp]# cp -i ~/.bashrc bashrc cp: overwrite `basrhc’? n # 重复作两次动作,由于/tmp 底下已经存在bashrc 了,加上-i 参数, # 则在覆盖前会询问使用者是否确定!可以按下n 或者y 呢! # 但是,反过来说,如果不想要询问时,则加上-f 这个参数来强制直接覆盖! 范例二:将/var/log/wtmp 复制到/tmp 底下 [root@linux tmp]# cp /var/log/wtmp . <==想要复制到目前的目录,最后的. 不要忘 [root@linux tmp]# ls -l /var/log/wtmp wtmp -rw-rw-r– 1 root utmp 71808 Jul 18 12:46 /var/log/wtmp -rw-r–r– 1 root root 71808 Jul 18 21:58 wtmp # 注意到了吗?!在不加任何参数的情况下,档案的所属者会改变,连权限也跟着改变了~# 这是个很重要的特性!要注意喔!还有,连档案建立的时间也不一样了! # 如果您想要将档案的所有特性都一起复制过来,可以加上-a 喔! [root@linux tmp]# cp -a /var/log/wtmp wtmp_2 [root@linux tmp]# ls -l /var/log/wtmp wtmp_2 -rw-rw-r– 1 root utmp 71808 Jul 18 12:46 /var/log/wtmp -rw-rw-r– 1 root utmp 71808 Jul 18 12:46 wtmp_2 # 了了吧!整个资料特性完全一模一样ㄟ!真是不赖~这就是-a 的特性! 范例三:复制/etc/ 这个目录下的所有内容到/tmp 底下 [root@linux tmp]# cp /etc/ /tmp
库卡工业机器人运动指令入门知识(学员必备)
库卡工业机器人运动指令的入门知识 问学完了KUKA机器人的运动指令后,可以了解到哪些? 答(1)通过对机器人几种基本运动指令的学习,能够熟练掌握机器人各种轨迹运动的相关编程操作 (2)通过学习PTP运动指令的添加方法,能够掌握机器人的简单编程 机器人的运动方式: 机器人在程序控制下的运动要求编制一个运动指令,有不同的运动方式供运动指令的编辑使用,通过制定的运动方式和运动指令,机器人才会知道如何进行运动,机器人的运动方式有以下几种: (1)按轴坐标的运动(PTP:Point-toPoint,即点到点) (2)沿轨迹的运动:LIN直线运动和CIRC圆周运动 (3)样条运动:SPLINE运动 点到点运动
PTP运动是机器人沿最快的轨道将TCP从起始点引至目标点,这个移动路线不一定是直线,因为机器人轴进行回转运动,所以曲线轨道比直线轨道运动更快。此轨迹无法精确预知,所以在调试及试运行时,应该在阻挡物体附近降低速度来测试机器人的移动特性。 线性运动
线性运动是机器人沿一条直线以定义的速度将TCP引至目标点。在线性移动过程中,机器人转轴之间进行配合,是工具或工件参照点沿着一条通往目标点的直线移动,在这个过程中,工具本身的取向按照程序设定的取向变化。 圆周运动 圆周运动是机器人沿圆形轨道以定义的速度将TCP移动至目标点。圆形轨道是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以精确
定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具尖端取向的变化顺应与持续的移动轨迹。 样条运动 样条运动是一种尤其适用于复杂曲线轨迹的运动方式,这种轨迹原则上也可以通过LIN运动和CIRC运动生成,但是相比下样条运动更具有优势。 创建以优化节拍时间的运动(轴运动) 1 PTP运动 PTP运动方式是时间最快,也是最优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位 置。 2 轨迹逼近
库卡机械手操作界面说明书
菜单栏 功能选择栏 命令栏 操作栏 路径栏 程序栏 对话框 状态栏 一、界面说明
确认: 将对话框中高亮的一行确认掉; 全部确认: 将对话框中所有的信息确认掉。 操作模式选择 鼠标操作机器人移动
操作模式选择: 键盘操作机器人移动 新建:新建一个文档或者文件夹 打印:将目前程序栏内的文件打印出来 存档:-> 还原:-> 软盘格式化:将控制柜内的软盘格式化 筛选:输入特定的信息,以便更容易地找出需要的文件 文件 二、资源管理器模式下的功能说明
全部:将所有信息存入软盘。注:如果程序过多,则有可能存档失败。此时需要单独将应用程 序存档,再将其它设置进行存档。 应用程序:将程序栏内的所有程序存入软盘中 机器参数:将不同型号机器人的参数存入软盘中 配置:-> 登陆数据:将机器人操作时候的操作记录存入软盘中 输入/输出端配置:机器人和外围设备通讯接口配置 输入/输出长文本:机器人和外部设备通讯的基本通讯协议配置 库卡工艺包:为每个行业不同应用专门开发的工艺软件的配置 配置
请参看存档,还原即将存档的资料重新拷贝回机器人 输入/输出端:-> 输入/输出端驱动程序-> 提交解释程序-> 状态键:如果有安装库卡工艺包,则功能选择栏会出现相应的功能键 手动移动-> 用户组:有三个对应选项:用户,仅可以进行基本操作;专家:可以使用高阶编程语句进行软 件编写;管理员:可以对系统配置进行更改。 当前工具/基坐标:当前系统所用的工具类型或者基坐标类型。在正常情况下只有更换焊枪系 统以及外部轴系统需要用到此功能 工具定义:-> 开/关选项:-> 杂项:-> 配置
KUKA机器人编程手册
发布日期: 13.10.2011 版本: COL P1KSS8 Roboterprogrammierung 1 V1 zh
机器人编程 1 ? 版权 2011 KUKA Roboter GmbH Zugspitzstra?e 140 D-86165 Augsburg 德国 此文献或节选只有在征得库卡机器人集团公司明确同意的情况下才允许复制或对第三方开放。 除了本文献中说明的功能外,控制系统还可能具有其他功能。 但是在新供货或进行维修时,无权要 求库卡公司提供这些功能。 我们已就印刷品的内容与描述的硬件和软件内容是否一致进行了校对。 但是不排除有不一致的情况, 我们对此不承担责任。 但是我们定期校对印刷品的内容,并在之后的版本中作必要的更改。 我们保留在不影响功能的情况下进行技术更改的权利。 原版文件的翻译 KIM-PS5-DOC Publication:Pub COLLEGE P1KSS8 Roboterprogrammierung 1 zh Bookstructure:P1KSS8 Roboterprogrammierung 1 V4.2 版本:COL P1KSS8 Roboterprogrammierung 1 V1 zh 2 / 165发布日期: 13.10.2011 版本: COL P1KSS8 Roboterprogrammierung 1 V1 zh
目录 目录 1KUKA 机器人系统的结构和功能 (5) 1.1机器人技术入门 (5) 1.2库卡机器人的机械系统 (5) 1.3机器人控制系统 (V)KR C4 (8) 1.4KUKA smartPAD (9) 1.5smartPAD 概览 (10) 1.6机器人编程 (11) 1.7机器人安全性 (12) 2机器人运动 (15) 2.1读取并解释机器人控制系统的信息提示 (15) 2.2选择并设置运行方式 (16) 2.3单独运动机器人的各轴 (18) 2.4与机器人相关的坐标系 (21) 2.5机器人在世界坐标系中运动 (23) 2.6在工具坐标系中移动机器人 (27) 2.7在基坐标系中移动机器人 (31) 2.8练习: 操作及手动移动 (35) 2.9用一个固定工具进行手动移动 (37) 2.10练习: 用固定的工具练习手动移动 (38) 3机器人的投入运行 (39) 3.1零点标定的原理 (39) 3.2给机器人标定零点 (41) 3.3练习: 机器人零点标定 (45) 3.4机器人上的负载 (47) 3.4.1工具负载数据 (47) 3.4.2机器人上的附加负载 (48) 3.5工具测量 (49) 3.6练习: 尖触头的工具测量 (58) 3.7练习: 抓爪工具测量,2 点法 (61) 3.8测量基坐标 (63) 3.9查询当前机器人位置 (66) 3.10练习: 工作台的基坐标测量,3 点法 (68) 3.11固定工具测量 (70) 3.12测量由机器人引导的工件 (71) 3.13练习: 测量外部工具和机器人引导的工件 (73) 3.14拔出 smartPAD (77) 4执行机器人程序 (81) 4.1执行初始化运行 (81) 4.2选择和启动机器人程序 (82) 4.3练习: 执行机器人程序 (86) 5程序文件的使用 (89) 5.1创建程序模块 (89) 5.2编辑程序模块 (90) 5.3存档和还原机器人程序 (91) 发布日期: 13.10.2011 版本: COL P1KSS8 Roboterprogrammierung 1 V1 zh 3 / 165
数铣G代码指令详细解释
G代码
G00 功能:在加工过程中,常需要刀具空运行到某一点,为下一步加工做好准备,利用指令G00可以使刀具快速移动到目标点。 指令格式:G00 X_Y_Z_;(模态、初态) 说明:地址X,Y和Z指定目标点坐标,该点在绝对坐标编程中,为工作坐标系的坐标;在相对坐标编程中,为相对于起点的增量。执行G00指令时,刀具的移动速度由系统参数设定,不受进给功能指令F的影响。刀具的移动方式有三种:
1) 各轴以其最快的速度同时移动,通常情况下因速度和移动距离的不同先后到达目标点,刀具移动路线为任意的。 2) 各轴按设定的速度以联动的方式移动到位,刀具移动路线为一条直线。 3) 各轴按输入的坐标字顺序分别快速移动到位,刀具的移动路线为阶梯形。 用户可以根据自身需要,选择其中一种刀具移动方式在OpenSoftCNC配置系统中设置,参见OSNC 01M系统配置手册章节系统参数设置。该指令执行时一直有效,直到被同样具有插补功能的其它指令(G01/G02/G03/G05)取代。 编程举例:如图所示,命令刀具从点A快速移动到点B,编程如下: 1. 绝对编程: N20 G90 G00 X25 Y30; 2. 相对编程: N20 G91 G00 X15 Y20; 提示:G00指令中缺省的坐标轴视为该轴不运动,如例中Z轴不动。 G01 功能:G01用来指定直线插补,其作用是切削加工任意斜率的平面或空间直线。指令格式:G01 X_ Y_ Z_ F_;(模态) 说明:地址X,Y和Z指定目标点坐标,该点在绝对坐标编程中,为工作坐标系的坐标;在相对坐标编程中,为相对于起点的增量,F指定刀具沿运动轨迹的进给速度。执行该指令时,刀具以坐标轴联动的方式,从当前位置插补加工至目标点。移动路线为一直线。该指令一直有效,直到被具有插补功能的其它指令 (G00/G02/G03/G05)取代。 编程举例:如图所示,命令刀具从点A直线插补至点B。
linux getty命令参数及用法详解
linux getty命令参数及用法详解--linux开启及设置终端命令getty(get teletype write r) 功能说明:是Unix类操作系统启动时必须的三个步骤之一,用来开启终端,进行终端的初始化,设置终端。 语法:getty [-h][-d<组态配置文件>][-r<延迟秒数>][-t<超时秒数>][-w<等待字符串>][终端机编号][连线速率<终端机类型><管制线路>] 或 getty [-c<定义配置文件>] 补充说明:getty指令是UNIX之类操作系统启动时所必须的3个步骤之一。 getty 命令设置和管理终端线路和端口。getty 命令由 init 命令来运行。getty 命令与终端状态管理员程序相链接。终端状态管理员程序提供了终端控制和登录的复合功能。 注意:getty 命令不在命令行输入。 当作为 getty 命令调用时,终端状态管理员程序提供了通常的端口管理功能,这包括 : 双向使用允许使用终端线路用来启动和接受连接。 线路速度设置发送和接收的波特率。 奇偶性将奇偶性设置为偶数、奇数或无。 延迟设置回车、制表符、换行以及换页延迟。 字符集映射为大小写、制表符和换行控制设置字符集映射。 登录器程序指定用于使用户登录到系统的程序。如果设置了此属性,
则禁用安全注意密钥(SAK)的处理功能。如果没有设置此属性,则其缺省值为 /usr/sbin/login 。logger属性包含在对象数据管理员(ODM)数据库中。 字符和行擦除设置用于字符和行擦除的击键。 回应方式设置本地或远程回应。 当调用 getty 命令时,会发生下列步骤: 根据 ODM 数据库中的所有者和保护属性来设置端口保护。如果没有指定这些属性,则其缺省值为 root 用户和 622。 打开由端口名参数指定的端口。如果在端口可以进行载波检测,则直到载波出现或其它的进程已丢失此端口的载波,打开才完成。 指定的端口可能会被锁定。如果 getty 命令带 -u 或 -r 标志运行,它会试图锁定端口。如果锁定了端口,此命令将一直等待端口可用为止,继而退出。如果指定了 -r 标志,getty 命令将等待从端口接收一个字节的数据,然后继续。 根据所指定端口的配置信息设置终端属性。此时能否启用安全注意密钥处理就在于系统的配置如何。 载波消息被写入到指定的端口。 从指定端口读取登录名。如果发生帧错误或中断,则 getty 命令将使用下一组配置的终端属性重复第四和第五步。这是循环调制解调器波特率最常使用的方法。但是可以通过在 ODM 数据库中输入以逗号隔开的值来循环任何 ODM 字段(除了 logmodes和 runmodes)。 按照 runmodes 参数和登录名称复位终端方式。如果登录名称由新行
库卡工业机器人运动指令入门知识学员必备
库卡工业机器人运动指令的入门知识问学完了的运动指令后,可以了解到哪些? 答(1)通过对机器人几种基本运动指令的学习,能够熟练掌握机器人各种轨迹运动的相关编程操作 (2)通过学习PTP运动指令的添加方法,能够掌握机器人的简单编程 机器人的运动方式: 机器人在程序控制下的运动要求编制一个运动指令,有不同的运动方式供运动指令的编辑使用,通过制定的运动方式和运动指令,机器人才会知道如何进行运动,机器人的运动方式有以下几种: (1)按轴坐标的运动(PTP:Point-toPoint,即点到点) (2)沿轨迹的运动:LIN直线运动和CIRC圆周运动 (3)样条运动:SPLINE运动 点到点运动 PTP运动是机器人沿最快的轨道将TCP从起始点引至目标点,这个移动路线不一定是直线,因为机器人轴进行回转运动,所以曲线轨道比直线轨道运动更快。此轨迹无法精确预知,所以在调试及试运行时,应该在阻挡物体附近降低速度来测试机器人的移动特性。
线性运动 线性运动是机器人沿一条直线以定义的速度将TCP引至目标点。在线性移动过程中,机器人转轴之间进行配合,是工具或工件参照点沿着一条通往目标点的直线移动,在这个过程中,工具本身的取向按照程序设定的取向变化。 圆周运动 圆周运动是机器人沿圆形轨道以定义的速度将TCP移动至目标点。圆形轨道是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以精确定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具尖端取向的变化顺应与持续的移动轨迹。 样条运动 样条运动是一种尤其适用于复杂曲线轨迹的运动方式,这种轨迹原则上也可以通过LI N运动和CIRC运动生成,但是相比下样条运动更具有优势。 创建以优化节拍时间的运动(轴运动) 1 PTP运动 PTP运动方式是时间最快,也是最优化的移动方式。在KPL程序中,机器人的第一个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个唯一的起始位置。 2 轨迹逼近
SHUTDOWN命令 使用详细说明及各参数
用法: shutdown <-i | -l | -s | -r | -a; <-f; <-m computername; <-t xx; <-c comment; <-d up:xx:yy; 没有参数显示此消息(与 ? 相同) -i 显示 GUI 界面,必须是第一个选项 -l 注销(不能与选项 -m 一起使用) -s 关闭此计算机 -r 关闭并重启动此计算机 -a 放弃系统关机 -m computername 远程计算机关机/重启动/放弃 -t xx 设置关闭的超时为 xx 秒 -c comment 关闭注释(最大 127 个字符) -f 强制运行的应用程序关闭而没有警告 -d :xx:yy 关闭原因代码 u 是用户代码 p 是一个计划的关闭代码 xx 是一个主要原因代码(小于 256 的正整数) yy 是一个次要原因代码(小于 65536 的正整数) -f:强行关闭应用程序 -m 计算机名:控制远程计算机 -i:显示图形用户界面,但必须是Shutdown的第一个选项 -l:注销当前用户 -r:关机并重启 -t时间:设置关机倒计时 -c 消息内容:输入关机对话框中的消息内容(不能超127个字符 2、举例: 关闭计算机 shutdown –s (方法:开始-;运行-;shutdown -s-;确定) 延迟3秒关闭计算机 shutdown –s –t 3(方法:开始-;运行-;shutdown –s –t 3-;确定) 取消关闭计算机 shutdown –a (方法:开始-;运行-;shutdown –a-;确定) 3、应用: (1)您如果想在1小时后自动关闭计算机,比如:您正在下载一个软件或一部电影,而您有急事要去丽水,您会怎么办?停止下载?太可惜了!继续?下载完后电脑怎么关闭?不用愁!您可以使用该命令解决: shutdown –s –t 3600 (系统在3600秒后关闭计算机,时间自定) 您就放心地去丽水了,而不用担心您的计算机长期开着了。