电动车用辅助逆变器的设计与实现

电动车用辅助逆变器的设计与实现
摘要: 电动汽车的运行与普通汽车有许多不同, 需要设计安装大量专用辅助设备, 且要求辅助设备结构简单、运行稳定、运行成本低。文章描述了电动车用辅助逆变器的特殊应用环境和工作要求, 提出一种设计思路, 并分别从硬件结构和软件流程两方面介绍系统的构成。关键词: 逆变器 SA 4828 芯片脉宽调制 CAN 总线
1 引言
目前各种类型的电动汽车发展日新月异, 车辆主动力单元采用的电机和驱动方式各有特色, 但在车用辅助电机的选择上却观点一致, 即充分利用电动车直流母线电压高 (通常为300~ 600 V ) 的特点, 利用辅助逆变器将直流变成三相交流电驱动交流异步电机, 为车上的刹车气泵、液压助力泵、空调压缩机等设备提供动力。在大型电动车上, 驱动这些设备的电机功率在 3~ 10 kW 之间, 采用交流电机可以比同等直流电机成本更低、体积更小、重量更轻, 而且运行噪音小、维护量大大降低。电动车的发展在国外已经进入实际应用阶段, 而国内仍处于开发样车阶段, 多数研发单位只是将通用变频器进行简单改装后作为辅助逆变电源投入使用。这样不仅成本较高, 不能完全适应电动车的实际运行需要, 也不具备 CAN 总线通讯能力, 无法参与整车系统的数据通讯。新公布的国家“863 计划”关于电动车发展规划中已经明确规定: 新申报的电动车开发项目必须采用基于CAN 总线的整车通讯控制系统。因此辅助逆变器在提供三相交流电源功能的同时, 系统必须具有CAN 总线通讯接口, 以便参与整车系统的控制。电动车用辅助逆变器的设计必须充分考虑产品的运行环境和负载特点, 简化系统硬件结构, 确保设备运行稳定。从直流输入来看, 电动车动力电池电压有一定的波动范围, 在电量充足时每个电池单体的电压可以达到 1.
45 V 或更高, 随着使用过程中能量的不断输出, 电压会逐渐降低, 达到 1. 2 V 甚至更低。由 280 节单体串联成的电池组, 其母线电压通常会在 400~ 330 V 之间浮动, 变化率高达 21. 2%。因此逆变器必须能够适应较宽范围内的电压浮动。同时, 作为电源设备, 这种辅助逆变器不仅可以驱动各种三相交流电机, 还可以作为车上的工频电源, 为更多的车载设备服务。因此, 设计开发一种专用的电动车用辅助逆变器, 不仅可适应电动车直流母线电压浮动大的特点, 还可以参与整车控制, 提高系统运行效率、节约能源。
2 系统整体构成设计
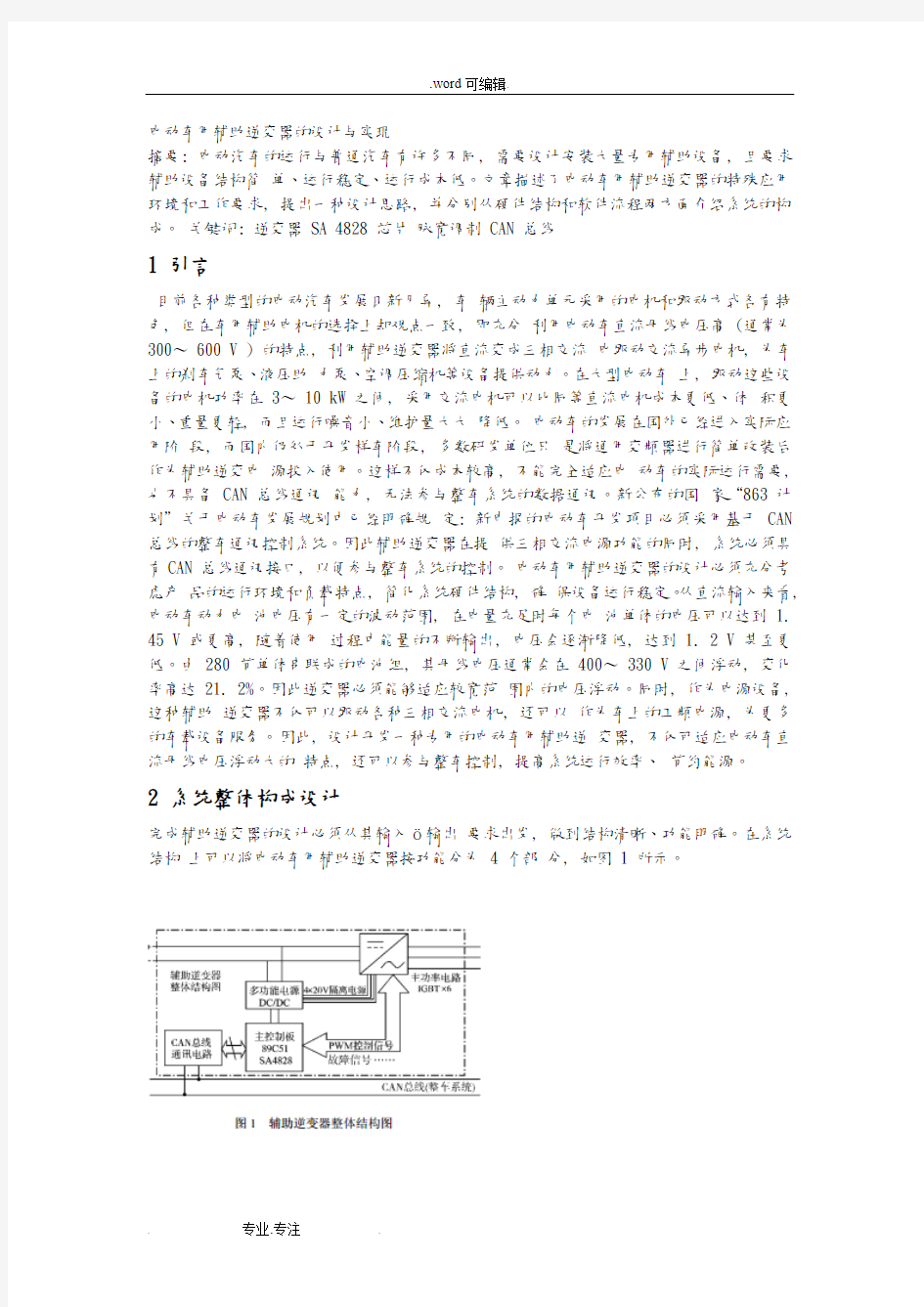
完成辅助逆变器的设计必须从其输入?输出要求出发, 做到结构清晰、功能明确。在系统结构上可以将电动车用辅助逆变器按功能分为 4 个部分, 如图 1 所示。
1)DC?DC 电源, 自动适应直流输入端的大范围电压浮动, 为逆变器的其他电路提供稳定的低压电源。
2) 主功率逆变电路, 由 6 路 IGBT 组成三相逆变桥, 完成主直流电源的逆变输出。
3) 逆变器主控制板, 监测各路输出的电压、电流, 根据运行情况智能调整逆变电路的输出; 采用三相 PWM 波型发生专用芯片, 提高系统稳定性。
4) 整车通讯接口, 负责传递逆变器运行数据, 参与整车系统的通讯和控制。每个部分尽量采用成熟技术和常用标准器件, 保证系统运行的可靠性。
3 硬件实现
本辅助逆变器的直流输入为 330~ 400 V , 交流输出相间电压 220 V , 输出频率 50 H z, 最大输出功率 5 kW。因为负载中包括单相交流电机, 系统设计中考虑了解决三相负载不平衡的问题。
311 DC?DC 多功能电源
所谓多功能是指该DC?DC 电源不仅要为整个辅助逆变器提供多路隔离电源, 同时具有自动适应输入电压波动的功能。电路板中采用 SG3525A 集成脉宽调制器作为主控制单元, 功率 M O SFET 管、多抽头高频变压器和二极管整流电路等设备共同组成 1 个稳压电源, 如图 2 所示。
作为核心器件的 SG3525A 是一种常用开关电源控制器, 包括了脉宽调制开关稳压电源所需的基本电路。外接振荡电路后, 芯片可以从输出端 OU TA 发出高频脉冲信号, 驱动功率M O SFET 管, 并由后者控制变压器原边高压电路的导通和关断。高频变压器副边为彼此隔离的多路绕组, 经二极管整流后, 输出多路 5 V , 12 V 和 20 V 稳定直流电压。 SG3525A 内部比较器可根据+ V , - V 2 个管脚的输入调整输出信号的脉宽。将变压器输出端的 1 路 5 V 电压作为负反馈接入管脚- V , 而将芯片自身发出的标准电压V REF 引入管脚 + V , 形成DC?DC 电源输出的闭环控制。当系统输入电压受到整车直流母线电压下降影响时, SG3525A 根据反馈电压及时进行补偿, 从而保证在不同电压输入条件下实现稳定的直流电压输出。
3. 2 主功率逆变电路
辅助逆变器主功率电路的设计目标是简化结构, 并尽量减少不必要的线路和设备。硬件结构主要包括由 6 个独立 IGBT 搭建而成的三相逆变桥, 以及 EXB841 专用芯片组成
的标准驱动电路。由于辅助变频器驱动的负载明确, 就是普通三相异步电机, 不需要过多考虑电压输出波形的圆滑, 因此只在高压直流母线上并入大容量电容, 适当吸收逆变桥产生的脉冲尖刺。同时在直流和交流侧分别安装电压、电流感应器件, 为控制板提供监测数据。
3. 3 主控制板
逆变器主控制板是整个系统的核心, 它不仅要给三相逆变电路提供控制信号, 还要不断采集主电路的电压、电流数据, 并根据收集的信息合理调整系统运行状态。控制板采用单片机 89C51 与三相高精度 PWM 波发生器 SA 4828 构成, 各主要接线如图 3 所示。单片机负责主功率电路各种信号的采样, 完成各种逻辑运算, 调整运行参数, 同时通过CAN 总线接口与整车系统进行数据通讯。主功率电路三相逆变桥的控制信号由 SA 4828 提供, 该芯片是M ITEL 公司生产的新一代 PWM 波发生器, 能够独立对三相输出分别独立控制, 确保在负载不平衡的情况下三相输出电压的不平衡度不会超标。 SA 4828 芯片的特点是控制简单、频率精度高, 且运行可靠性高, 它支持标准的 8 位M O TEL 复用数据总线, 可以方便地和单片机交换数据。单片机只需对芯片内部的 8 个数据寄存器赋值, 就可以完成对 PWM 波形输出的初始化和实时控制。 SA 4828 芯片为标准 28 脚双列直插式封装, 管脚 RPH T , RPHB, YPH T , YPHB, BPH T , BPHB 输出三相可独立控制的 TTL 驱动信号, 对应驱动三相逆变桥上的 6 路 IGBT。针对三相负载的不平衡情况, SA 4828 允许通过软件决定三相输出波形的幅值, 选择统一控制或三相分别独立控制, 确保三相电压的平衡输出。为了确保运行安全, 芯片的 SET TR IP 能够响应IGBT 驱动电路返回的故障信号, 迅速关断 PWM 波形输出, 对逆变器电路进行快速保护, 并通过 TR IP 状态输出端通知 89C51 单片机。控制板采用这种器件组合结构的优点为: 辅助逆变器进入稳定运行状态后, SA 4828 可以独立维持三相逆变桥的运行, 不再占用单片机工作资源; 单片机多数时间是通过 A ?D 转换电路监测系统的电压、电流幅值, 根据运行情况向 SA 4828 控制寄存器写入参数, 改变三相输出; 同时单片机具有足够的时间响应整车系统, 进行 CAN 总线通讯。此外, 单片机的 2 个外部中断输入脚分别连接 SA 4828 的 TR IP 输出和 CAN 总线通讯接口电路, 用以触发不同的中断服务程序。
3. 4 CAN 总线通讯接口
控制器局部网(CAN - Con tro ller A rea N et2 wo rk) 属于现场总线范畴, 它是一种有效支持分布式控制或实时控制的串行通讯网络。它可以根据优先权进行总线访问, 系统配置灵活, 信息传输快速可靠。由于该系统可以实现故障节点的自动脱离, 确保整个
网络的稳定, 因此在现代电动车辆上都开始广泛采用CAN 总线通讯形式。辅助变频器的通讯接口属于整车系统CAN 总线上的 1 个节点, 系统硬件主要包括 CAN 总线控制器SJA 1000 和 CAN 总线收发器 82C250, 它们与单片机共同完成数据交换和通信处理, 硬件连接如图 4 所示。图 4 CAN 总线通讯接口电路结构系统工作时, CAN 总线控制器SJA 1000 从 CAN 总线接收上位机发出的命令和数据, 以中断方式通知单片机 89C51。单片机启动数据采集程序, 将当前的运行数据经 CAN 总线控制器发送给整车系统接收。整车系统通过各种数据监视逆变器运行状况, 并根据情况通过 CAN 总线发送命令调整辅助变频器的运行参数。 4 软件设计辅助逆变器的控制软件由 8051 汇编语言编制, 在完成其控制功能外, 力求程序的合理与简化, 以适应电动汽车对系统稳定性和可靠性的要求, 控制流程如图 5 所示。
图 5 控制流程图逆变器上电运行后, 单片机 89C51 首先对 SA 4828 芯片进行数据初始化, 然后根据负载电机的特点运行电机软启动程序, 不断修改 SA 4828 控制寄存器的数据, 逐渐升高三相电压输出(或同时根据需要逐渐升高频率输出)。电压 (频率) 达到预定工作点后, 辅助变频器即进入稳定运行状态。此时程序将始终循环检测 2 个项目: ①各电路的电压、电流是否正常, 即根据运行情况程序自动调整三相(或某相) 输出电压波形幅值; ②控制参数是否发生改变, 这种情况是由于整车系统经总线通讯接口修改了单片机内部的控制参数, 则控制程序根据新的数据改变输出电压或频率。此外, 控制程序包括 2 个中断服务程序: ① CAN 总线通讯程序( IN T 1) , CAN 总线通讯接口接收到整车系统发出的命令和数据, 通过中断方式通知 89C51, 完成系统数据采集和控制参数设定的功能; ②故障保护程序 ( IN T 0) , 当三相逆变电路发生故障时, EXB841 驱动芯片立即发出故障信号, SA 4828 芯片在第一时间关断 PWM 输出, 并触发单片机 IN T 0 中断, 执行故障保护程序, 单片机在停止各芯片工作的同时, 通过CAN 总线通知整车系统发生故障, 并最后完成辅助逆变器的安全关机。 5 结语实验结果显示, 辅助逆变器在 330~ 400 V 的直流电压输入条件下运行稳定, 始终保持220 V 的三相交流电压输出。三相负载不平衡度达到 35% 时, 仍能维持三相电压不平衡度< 1% , 满足使用要求。同时, 由于简化不必要的结构和功能, 系统整体制作成本远远小于购买通用变频器的费用。由此得出, 根据电动车辆的实际运行条件, 结合用电设备的特点, 能够设计出结构简单且运行稳定的电动汽车理想辅助逆变电源。采用单片机结合 SA 4828 专用 PWM 波形发生芯片制作电动车用辅助逆变器, 系统智能化程度高、
动态响应迅速、功能实际、运行稳定, 是一种较好的设计方案。对于不同的 CAN 总线通讯系统, 可以适当修改 CAN 总线接口的通讯子程序, 从而适应不同车型的需要。参考文献 1 M ITEL SEM ICONDU CTOR. (SA 4828 32Phase Pulse W idth M odulation Engine) A dvance Info rm ation, 1999 2 邬宽明 1CAN 总线原理和应用系统设计 1 北京航空航天大学出版社, 1996 收稿日期: 2002203207 修改稿日期: 2002208203 43