毕业设计论文-网球发球机设计论文
1前言
1.1选题背景
随着网球运动的发展,网球发球机应运而生。据调查,近年来国内的网球发球机市场基本处于空白状态,基本上都是在销售国外的产品。从《自动发球控制系统》[3] 一文中了解到:相比我国,国外发球机的发展已有一定规模,功能也比较齐全,但价格一直居高不下,所以需要设计一种适用于平时的训练的简易实用的网球发球机。目前,在市场上主流的网球发球机是靠两个轮子的相对旋转时挤压网球将网球打出。因为这样发球能提供更高的性能,对球的控制比较准确。同时,一般网球机都有先进的微电脑自动控制技术,能够实现可远程控制发球,在全场和半场任意调整发球。所以,本文也采用这种双轮摩擦发球方式,同时采用单片机实现对网球机的控制。
随着大规模集成电路的发展,单片机技术也越来越成熟,现已应用在各种控制领域。相对于微机而言,单片机的性价比较高,非常适合应用在简单的控制场合;同时,它还有集成度高、体积小,可靠性高与抗干扰能力强等优点。在强磁场环境下,易于采取屏蔽措施,可以在恶劣环境下正常工作;控制功能强,功耗很低;系统扩展和系统配置有一定规范,所以容易构成各种规模的应用系统。本设计采用的AT89S52单片机是一种低功耗、高性能并且系统内含有8KB可编程Flash 存储器的8位CMOS 微处理器。
1.2设计内容
网球发球机的设计内容包括两大部分:机械机构和电路控制。
机械机构是发球机的主要部分,它构成网球发球机的骨架。机械部分最主要的是发球机构,包括它发球的原理、对发球力度的控制以及如何更接近的模拟人的动作等等。另外,还要一些辅助机构调节发球高度、发球角度及发球频率等。机械机构是抛出网球的直接执行机构。
第二部分是电气控制部分。电气控制部分通过各种电路来实现对机械的各个机构的协调控制,使发球机能随意的调节发球速度、发球频率、发球高度及摆动角度,从而满足不同水平的练习者的要求。两大主要部分有机统一的构成一个完整的网球发球机。
2 总体方案设计
网球发球机从整体上包括机械部分设计和电路部分设计,下面先叙述一下总体的设计方案。
2.1机械机构总体方案
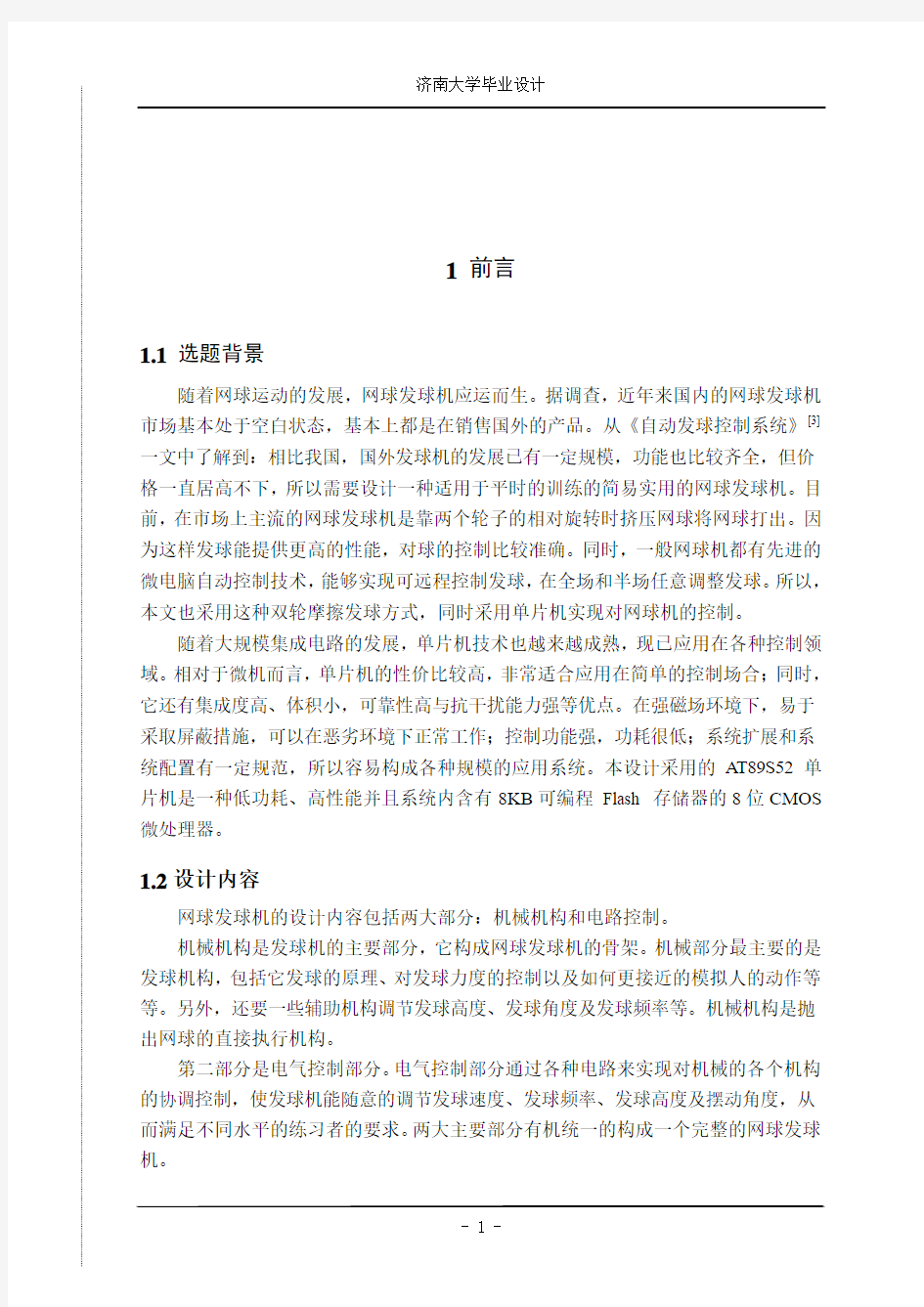
设计的网球发球机要完成模拟人工发球的任务,应能产生连续的多角度、多速度球路变化。网球发球机的各个功能组成如下图2-1所示。
图2-1 网球发球机的主要组成
机械机构可看作由四大部分组成:储球机构、发球机构、高度调整机构和角
度调整机构。
网球发球机的工作原理:在储球机构中,储球筐用来盛放若干数量的网球,网球经过开有四个与网球差不多大孔的下球盘,进入球轨道。其中,下球盘的转动要靠直流电机来带动,这样就可以通过调节直流电机转动的快慢来调整出球的频率了;发球机构的原理是通过两个直流电机带动两个摩擦轮转动,两个摩擦轮之间的间距略小于网球的直径,当球进入发球机构时,在摩擦力的带动下,球将被发射出去。
发球高度调整机构可以实现发球机发出不同高度的球的功能,其工作过程是:交
流发球机带动曲柄摇杆转动,曲柄带动摇杆摆动,摇杆的摆动使固定在支撑板上的两个摩擦轮在竖直平面内的一定角度内摆动,从而实现高度的调节。角度调整结构,同样的通过交流电机在曲柄摇杆的作用下,带动整个上箱体在相对于下箱体在一定角度内摆动,可以使网球机发出的网球落入对方场地的不同位置。
2.2电气控制总体方案
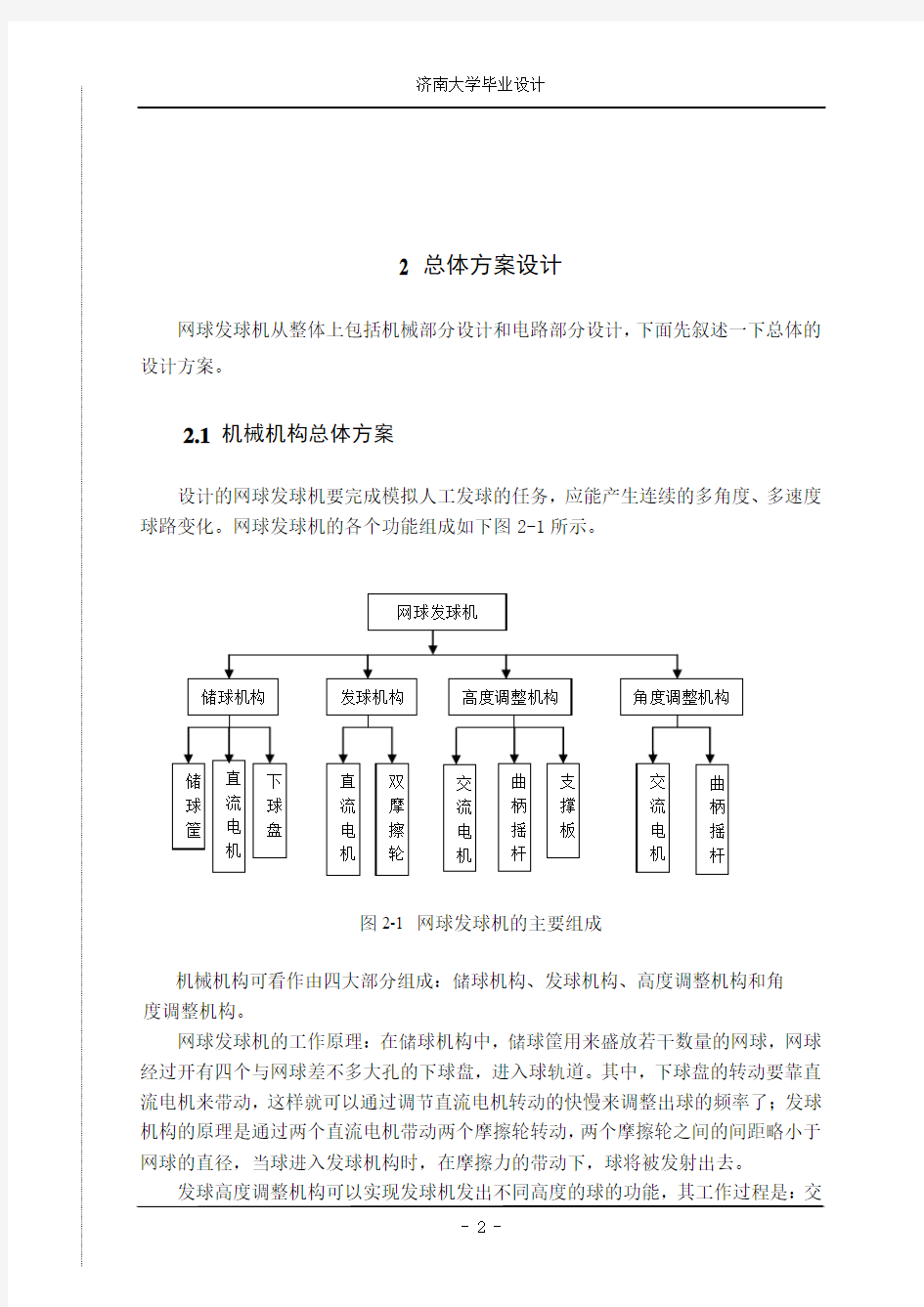
电气控制采用AT89S52单片机控制,单片机通过锁存器74LS373接6264,以扩展数据存储器;通过P2口接3-8译码器74LS138,选通6264、8255等芯片。通过P0口输出数字信号到D/A转换器DAC0832,转换输出模拟信号以控制电压,从而调节电机的转速。通过8255扩展并行接口,输出信号通过光电耦合控制继电器从而控制交流电机的启停,实现发球高度及角度的调节。另一方向上,通过控制8279实现键盘显示器的控制。在P1口接上控制按钮,用于设置网球发球机的参数;将用于接收红外遥控信号的机电一体化接收头接在单片机的中断口。具体的组成如图2-2所示。
图2-2 电路系统组成
3网球发球机机械部分设计
机械部分的设计包括储球机构设计、发球机构设计以及发球角度、高度调整机构的设计。
3.1 储球机构
储球机构包括储球筐、下球盘及带动下球盘直流电机。球筐下面是由直流电机带动的下球盘,下球盘与输送管相连。将若干网球放到球筐中后,当下球盘上的下球孔转到与输送管重合时,网球就顺着输送管落到发球机构中。整体的结构示意图如下图3-1所示。
图3-1储球机构设计
球筐四周由铁皮焊接而成,底面制作成斜坡的形状,这样网球就能顺着斜坡滚入到下球盘中。在应用中,也可以用类似的东西代替铁皮。具体结构如下图3-2所示。
由直流电机带动的下球盘,是用来控制发球频率的结构。下球盘被分为四个格子,中间有肋板隔开。在下球盘的下方下面有一个输送管,每当下球盘转到有一个下球孔与下面的输送管重合时,球就会落下。然后球会顺着输送管到达发球机构。下球孔及输送管的直径都应比网球的直径略大,取Φ70mm。为了防止一个格子同时落入两个球,在正对输送管的下球盘的上方加一个固定的拨球片。下球盘结构示意图如图3-3所示。
图3-2球筐 图3-3 下球盘
网球机的发球频率一般是2S/球~8S/球,因为拨盘上有四个下球口,换算成转速是7.5r/min ~1.875r/min ,经过筛选,选用内含减速装置的微型直流减速电动机:J55SZ-PX 电机。它所配的电源采用脉宽调制技术。PWM 控制方法能提供较高的精度并且噪音较小,同时具有先进的短路保护功能,能输出0~220伏连续可调的直流稳压电源,使电动机转速实现无级变速[6]。电动机主要参数为:
功率:30w 转速:10r/min 工作电压:24V
3.2 发球机构
本设计的发球机构采用的是双轮摩擦的结构,即双轮对滚,通过两轮的摩擦力将球发射出去。示意图如图下3-4所示。当两轮的转速相同时网球不发生旋转,且其线速度与摩擦轮线速度相同;当上轮的转速大于下轮的速度时,网球下旋,且其线速度与下轮的线速度相同。反之,网球上旋,且其线速度与上轮的线速度相同。通过调整控制两摩擦轮的直流电机的转速,就可以实现使网球机发出不同旋转的球的功能。
摩擦轮的材料采用硬脂塑料,其表面涂有一层1毫米厚的硅胶,这样可以增加摩擦轮与球之间的摩擦。将摩擦轮设计成高40mm 、直径160mm 的短圆柱形滚子。圆柱面上根据网球与摩擦轮接触的轮廓设计成圆弧曲面,使发球机能将网球按照固定的方向发射出去,示意图如下图3-5所示。
下球盘
图3-4 双轮发球原理示意图 图3-5 摩擦轮示意图
因为发球速度跟摩擦轮的速度有关,这里带动两个摩擦轮转动的电机选用调速性能良好的直流电机。
为了满足不同水平练习者的需要,发球速度设计可在80km/h ~120km/h 中调节,网球的发球速度球即摩擦轮的线速度为v ,摩擦轮的半径r 是80mm ,摩擦轮的角速度为w ,转速为n ,计算过程如下 :
W = v/r =(80~120)/(80×60) =(1.67~2.5)×104(rad/min ) (3-1) N = w/2π=(1.67~2.5)×104/(2×3.14)≈2630~
3980(r/min) (3-2)
可知,摩擦轮转速的范围是2630~3980r/min ,因为是直接带动摩擦轮,功率要求不高,选用小功率低转矩的电机即可。经筛选采用SZ 系列的微型直流伺服电动机中的55SZ60电机。电机的主要参数如下:
功率:29w 工作电压:48V 转速:4200(rad/min )
3.3 发球角度、高度调整机构
3.3.1 曲柄摇杆机构的设计
(1)摇杆机构摆动角度范围的确定。网球运动场地的形状如下图3-6所示,本次设计要完成网球发球机模拟人工发球的任务。首先,先设定发球的位置在端线处的中间位置。然后,计算网球发球机需要转动的角度:
tan θ=5485/23775=0.23 (3-3) θ=arctan0.23≈13° (3-4)
图3-6 网球运动场示意图
由上计算得知,网球发球机水平面内转动的角度应为26°。由此,曲柄摇杆机构中的摇杆应能在26°之内摆动。高度的调节与水平调节所采用的原理一样,选定摆角的范围同为26°。因为摆杆的极位夹角应大于1/2的摆角,所以选取极位夹角θ为15°,选定摇杆CD的长度为200mm。
(2)摇杆尺寸的确定。根据《机械原理》[8]上讲的图解法计算出曲柄摇杆机构的各个摇杆的长度。计算如下:首先,任选转动副D的位置,并按CD的长度和摆动
角度26°做出摇杆的两个极限位置DC1和DC2。然后,作∠C
1C
2
O=∠C
2
C
1
O=90°-θ,
得到C
1O和C
2
O的交点O。以O为圆心和OC1为半径作圆,则圆上任一点均可作为固
定铰链中心A。选定与D在同一水平面的一点为A点。如下图3-7所示。
设AB长度为a,BC长度为b,CD的长度为c, AD的长度为d,在图中量出AC1和AC2的长度,根据图中所示的关系有:
a + b= AC2(3-5)
b - a=AC1(3-6)
由此可算出a和b 的长度,另外,d的长度可测量出来。最后得出曲柄摇杆的长度分别是:
a=30(mm)
b=260(mm)
c=200(mm)
d=171(mm)
曲柄摇杆机构各个摇杆的尺寸已算出。
(3)电动机型号的选取。电动机带动曲柄做圆周运动,因此对其对转速和功率的要求都很低。由此选一个低转速、低功率的交流电机即可。本设计在《济南欧特机电手册中》选了一个90W的K系列感应式电动机6IK90GN-C。电动机的主要参数:工作电压:220V
工作频率:50Hz
转速:1300/1600r/min
这个系列的电动机自带减速箱,减速之后的转速是50/60r/min。
3.3.2 发球高度调整结构
(1)发球高度调整机构的总体结构。高度调整机构与发球机构相连接,通过一根轴实现。具体结构的示意图如图3-8所示:发球机构中的两个摩擦轮及带动它们的电机都固定在一块支撑板上。这样只要调整支撑板的角度,就可实现发球机构在竖直平面的拍动。在支撑板与箱体之间通过一根轴固定,电机带动曲柄摇杆机构在一定角度的摆动,转换为轴及支撑板的转动,实现高度调整。为了防止轴由于承受的压力过大而变形,在中间位置加一个滑动轴承起支撑作用。
(2)传动轴的固定。在高度调整机构和发球机构的连接中,传动轴起到很大的作用,它的一端通过滚动轴承固定在箱体上,另一端使用轴端挡圈固定在支撑板上,在支撑板上的固定采用双螺钉及止动垫片防松的方法。传动轴的结构示意图如下图3-9所示。
图3-8 发球高度调整机构传动示意图
图3-9 传动轴示意图
3.3.3 发球角度调整机构
(1)发球角度调整机构的总体结构。与高度调整机构相同,角度调整机构也是
图3-10 发球角度调整机构
3.4 箱体框架
网球发球机的箱体是先用角钢做出一个框架,然后在框架表面加上玻璃钢之类的高强度材料做成薄面。箱体的主干框架是用热轧等边角钢焊接起来的,坚固耐用。角钢的材料为碳素结构钢Q235-A,尺寸为30mm×30mm×3mm。箱体分为两部分,分成上部箱体和下部箱体,上部箱体的尺寸为710mm×765mm×800mm,下部箱体的尺寸为946mm×850mm×170mm,因为上部箱体需要相对于下部箱体转动,所以上箱体和下箱体分开。两者的结构示意图如下图3-11、图3-12所示。
图3-11 上箱体结构示意图
图3-12 下箱体结构示意图
上述就是网球发球机整个机械部分的各个机构的设计介绍,各个机构衔接起来组成一个完整的发球机。它的总体示意图如图3-13所示。
图3-13 网球发球机的整体结构示意图
1-直流电机2-下球盘3-支撑板4-直流电机5-高度调整曲柄摇杆机构6-高度调整机构交流电机7-轴1 8-角度调整机构交流电机9-角度调整曲柄摇杆机构10-轴2 11-控制面板12-下摩擦轮13-上摩擦轮14-球轨道
4.3 地址译码电路
74LS138是常用的译码器,它采用独立编址,输出低电平有效。通过三位的输入能寻址8位地址口。其输入端A 、B 、C 接单片机的P2.5~P2.7口。E3输入高电平,E1、E2接低电平;输出口Y0接DAC0832的XFER 引脚,Y1~Y3分别接三个DAC0832的选通引脚CS 端,Y4接6264的选通引脚CS ,Y5、Y6分别接8255和8279的选通引脚。电路图如下图4-5所示。
图4-5 74LS138的连接电路
4.4 D/A 转换电路
本设计的D/A 转换是采用DAC0832芯片实现的。它需要外接运算放大器才能得到模拟电压,它的转换精度为8位,与TTL 电平兼容[11]。根据《电子技术》[12]中讲的运算放大器的原理将电流信号放大转换成电压信号来驱动PWM 调速。本装置要用到三个D/A 转换器,所以DAC0832采用双缓冲工作方式,即经过两级锁存。三个
DAC0832的Xfer 端都接在74LS138的Y0端,低电平有效;CS 端接74LS138的Y1~Y3端,低电平有效;数据总线DB0~DB7接单片机的P0口;模拟电流输出端I OUT1接运算放大器。电路图如下图4-6所示。
图4-6 D/A 转换电路
A 1
B 2C
3
E14E25E36
Y015Y114Y213Y312
Y411Y510Y69Y7
7
U2
74LS138
VCC
CS0CS1CS2P2.5P2.6P2.7D
8765
DB0DB1DB2DB3DB4DB5DB6DB7+12
3
2
1
8
4U6A
LM358
A G N D 3V c c 20Iout1
11
lsbDI0
7
Iout212DI16DI25Rfb 9
DI34DI416V r e f
8
DI515DI614m sb DI713I L E 19
WR2
18
CS
1WR12
Xfer 17D G N D
10
U3DAC0832
R57.5K
-12
R8
15K
R1015K
R915K
Vout
5
6
7
U6B
LM358
VCC
12J1CON2
W R
VCC
AGND
AGND
AGND AGND
控系统,必须采用隔离技术进行隔离。在输出通道的隔离中,最常见的是光电隔离技术,因为光信号的传递不受电场、磁场的干扰,可以有效的隔离电信号[16]。利用继电器使单片机输出的数字信号将转换为控制交流接触器的开关信号,而交流接触器接在