三相逆变器的建模
三相逆变器的建模
1.1逆变器主电路拓扑与数学模型
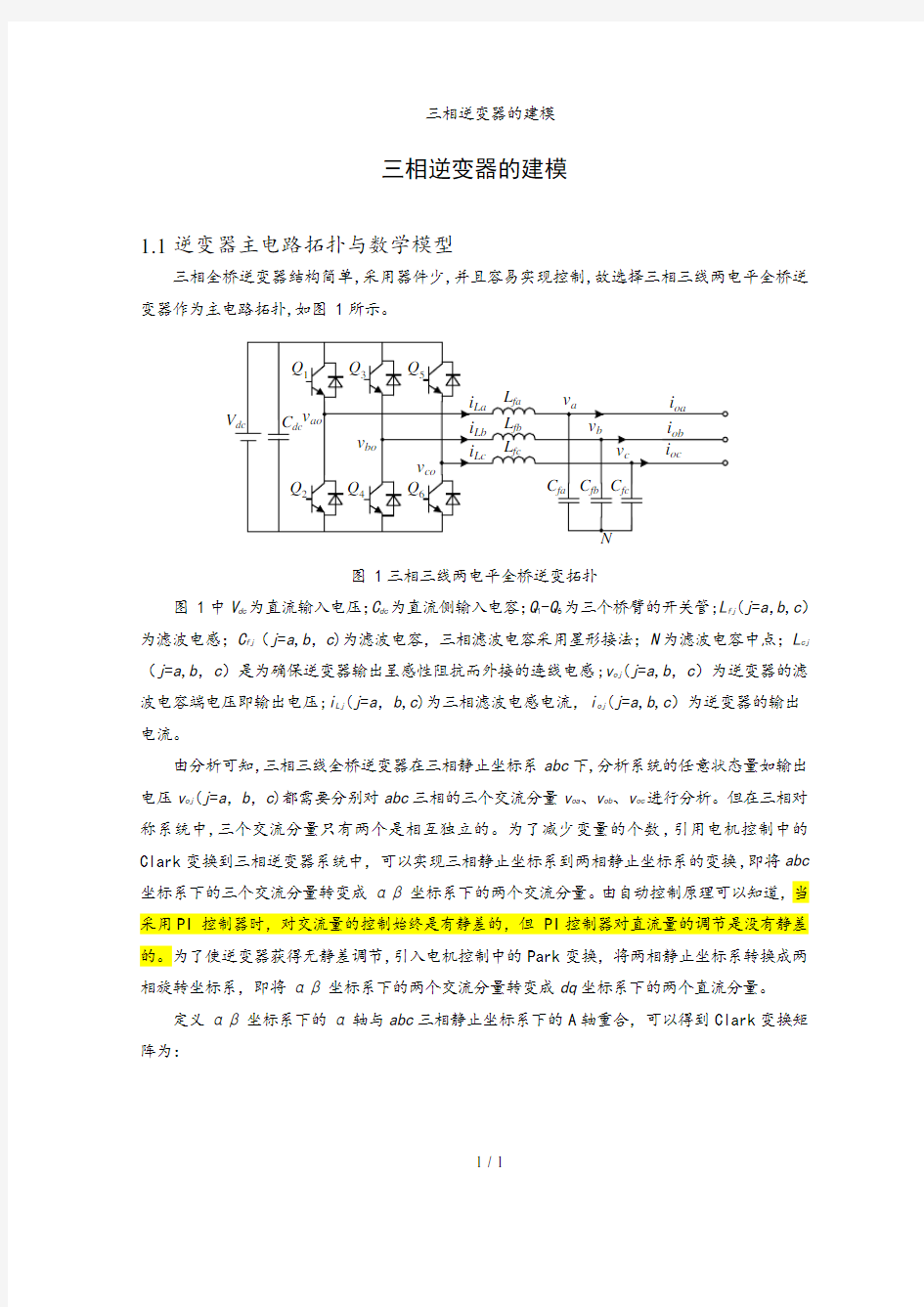
三相全桥逆变器结构简单,采用器件少,并且容易实现控制,故选择三相三线两电平全桥逆变器作为主电路拓扑,如图 1所示。
图 1三相三线两电平全桥逆变拓扑
图 1中V dc为直流输入电压;C dc为直流侧输入电容;Q1-Q6为三个桥臂的开关管;L fj(j=a,b,c)为滤波电感;C fj(j=a,b,c)为滤波电容,三相滤波电容采用星形接法;N为滤波电容中点;L cj (j=a,b,c)是为确保逆变器输出呈感性阻抗而外接的连线电感;v oj(j=a,b,c)为逆变器的滤波电容端电压即输出电压;i Lj(j=a,b,c)为三相滤波电感电流,i oj(j=a,b,c)为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系abc下,分析系统的任意状态量如输出电压v oj(j=a,b,c)都需要分别对abc三相的三个交流分量v oa、v ob、v oc进行分析。但在三相对称系统中,三个交流分量只有两个是相互独立的。为了减少变量的个数,引用电机控制中的Clark变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将abc 坐标系下的三个交流分量转变成αβ坐标系下的两个交流分量。由自动控制原理可以知道,当采用PI 控制器时,对交流量的控制始终是有静差的,但PI控制器对直流量的调节是没有静差的。为了使逆变器获得无静差调节,引入电机控制中的Park变换,将两相静止坐标系转换成两相旋转坐标系,即将αβ坐标系下的两个交流分量转变成dq坐标系下的两个直流分量。
定义αβ坐标系下的α轴与abc三相静止坐标系下的A轴重合,可以得到Clark变换矩阵为:
1 / 1
1 / 1
11122230Clark T ??--???=??? (1)
两相静止坐标系αβ到两相旋转坐标系dq 的变换为Park 变换,矩阵为:
cos()sin()sin()cos()Park t t T t t ωωωω??=??-??
(2)
对三相全桥逆变器而言,设三相静止坐标系下的三个交流分量为: cos()
cos(2/3)cos(2/3)
a m
b m
c m u U t u U t u U t ωωπωπ==-=+
(3)
经过Clark 和Park 后,可以得到: 0d m
q u U u == (4)
由式(3)和式(4)可以看出,三相对称的交流量经过上述Clark 和Park 变换后可以得到在 d 轴和 q 轴上的直流量,对此直流量进行 PI 控制,可以取得无静差的控制效果.
1.1.1 在abc 静止坐标系下的数学模型
首先考虑并网情况下,微电网储能逆变器的模型。选取滤波电感电流为状态变量,列写方程: 000a a a la b f b b lb c c lc c di dt u u i di L u u r i dt u u i di dt ????????????????????=--???????????????????????????? (5)
其中,f L 为滤波电感,r 为滤波电感寄生电阻,系统中三相滤波电感取值相同。
在abc 三相静止坐标系中,三个状态变量有两个变量独立变量,需要对两个个变量进行分析控制,但是其控制量为交流量,所以其控制较复杂。
1.1.2 在αβ两相静止坐标系下的数学模型
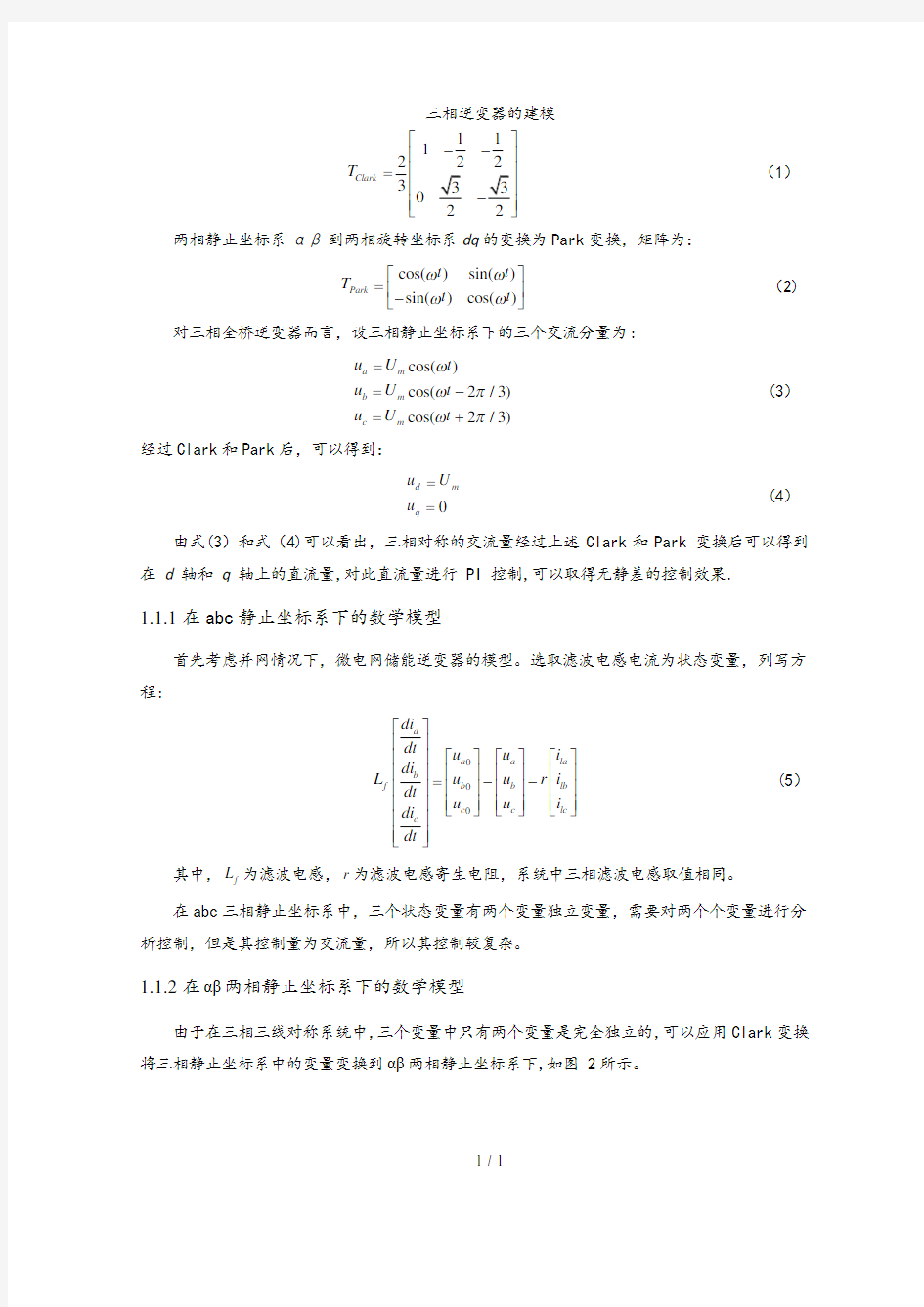
由于在三相三线对称系统中,三个变量中只有两个变量是完全独立的,可以应用Clark 变换将三相静止坐标系中的变量变换到αβ两相静止坐标系下,如图 2所示。
1 / 1
A
图 2 Clark 变换矢量图
定义αβ坐标系中α轴与abc 坐标系中a 轴重合,根据等幅变换可以得到三相abc 坐标系到两相αβ坐标系的变换矩阵:
12121203a b c u u u u u αβ??--??????=?????????????? (6)
联立式(5)与式(6),可以得到微电网储能逆变器在αβ坐标系下的数学模型:
00f di u u i dt L r u u i di dt ααααββββ????????????=--?????????????????? (7)
从式(7)可以看出,与三相静止坐标系下模型相比,减少了一个控制变量,而各变量仍然为交流量,控制器的设计依然比较复杂。
1.1.3 在dq 同步旋转坐标系下的数学模型
根据终值定理,PI 控制器无法无静差跟踪正弦给定,所以为了获得正弦量的无静差跟踪,可以通过Clark 和Park 变换转换到dq 坐标系下进行控制。dq 两相旋转坐标系相对于αβ两相静止坐标系以ω的角速度逆时针旋转,其坐标系间的夹角为θ,图 2给出了Park 变换矢量图。
图 3 Park 变换矢量图 Park 变换矩阵方程为:
cos sin sin cos d q u u t t u u t t αβωωωω??????=??????-?????? (8)
联立式(7)和式(8)可得微电网储能逆变器在dq 坐标系下的数学模型: