机电系统测控装置设计制作实践报告
机电系统测控装置设计制作实践报告
设计项目:单片机:自动散热器PLC:机械吊臂
班级:09机械1班
设计小组组员:
设计人姓名:苏汉生,江子毅,李国俊
提交日期:2012年3月9日
一、设计任务
(1)单片机自动监控系统
(2)PLC系统
二、设计过程
1、单片机系统
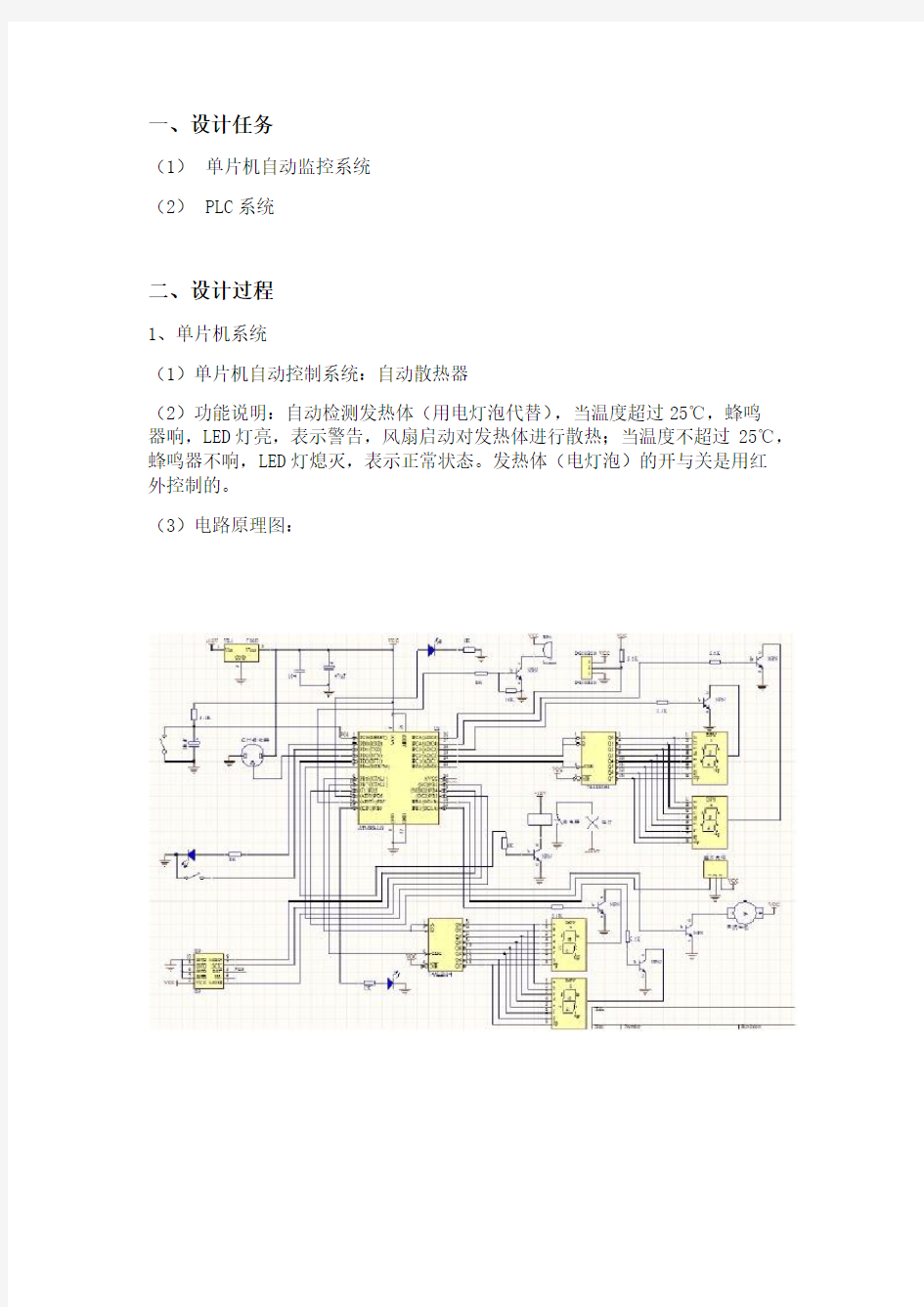
(1)单片机自动控制系统:自动散热器
(2)功能说明:自动检测发热体(用电灯泡代替),当温度超过25℃,蜂鸣
器响,LED灯亮,表示警告,风扇启动对发热体进行散热;当温度不超过25℃,蜂鸣器不响,LED灯熄灭,表示正常状态。发热体(电灯泡)的开与关是用红
外控制的。
(3)电路原理图:
(4)流程图:
(5)程序及每个函数的说明:
const unsigned char
Seg7_Data[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0 x77,0x7C,0x39,0x5E,0x79,0x71,0x00};
用于在数码管上显示数字的数组,对应的是
0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F
void time0_init(void)
{
OCR0A=10;
TCCR0A|=(1< TCCR0B|=((1< TCNT0=0; TIMSK0|=(1< 定时器0的初始化 void init_devices(void) { CLI(); time0_init(); DDRC|=0x1E; DDRD|=0xD8; PORTC&=0xE1; PORTD|=(1<<3); SEI(); } 设备初始化,对单片机上的I/O口进行初始化。 void display_num(unsigned char num) { static unsigned char wei=0; unsigned char num_l,num_r,i; num_r=num%10; num/=10; num_l=num%10; if(wei) num_r=Seg7_Data[num_r]; else num_r=Seg7_Data[num_l]; for(i=0;i<8;i++) { if(num_r&0x80) PORTC|=0x04; else PORTC&=0x0FB; num_r=num_r<<1; PORTC|=0x02; PORTC&=0x0FD; } if(!wei) { PORTC|=(1<<3); PORTC&=~(1<<4); } else { PORTC&=~(1<<3); PORTC|=(1<<4); } wei=!wei; } 采用74LS1648位移位寄存器(串行输入,并行输出)的显示函数,用于把要显示的数字送到数码管上,并显示出来。 void init_1820(void) { TEM_DDR&=~(1< SET_TEM_DDR; SET_TEM_SDT; CLR_TEM_SDT; delay_nus(180); SET_TEM_SDT; CLR_TEM_DDR; delay_nus(5); while(CHECK_TEM_SDT); SET_TEM_DDR; SET_TEM_SDT; delay_nus(80); } 该程序是DS18B20的初始化,主机总线t0时刻发送一复位脉冲(最短为480us,最长为960us的低电平信号),接着在t1时刻释放总线并进入接受状态, DS18B20在检测到总线的上升沿之后,等待15-60us,接着DS18B20在t2时刻发出存在脉冲(低电平,持续60-240us)。 void write_1820(unsigned char data) { unsigned char i; for(i=0;i<8;i++) { CLR_TEM_SDT; if(data&(1< SET_TEM_SDT; else CLR_TEM_SDT; delay_nus(20); SET_TEM_SDT; } SET_TEM_SDT; } 写时间隙,当主机总线t0时刻从高拉至低电平时,就产生写时间隙,见图1、图2,从t0时刻开始15us之内应将所需写的位送到总线上,DS18B20在t0后15- 60us间对总线采样。若低电平,写入的位是0,见图1;若高电平,写入的位是1,见图2。连续写2位间的间隙大于1us。 图1DS18B20写0时序 图2DS18B20写1时序unsigned char read_1820(void) { unsigned char temp,k,n; temp=0; for(n=0;n<8;n++) { CLR_TEM_SDT; SET_TEM_SDT; CLR_TEM_DDR; k=CHECK_TEM_SDT; if(k) temp|=(1< else temp&=~(1< delay_nus(20); SET_TEM_DDR; } return(temp); } 读时间隙,见图3,主机总线t0时刻从高拉至低电平时,总线至少保持低电平1us。之后在t1时刻将总线拉高,产生读时间隙,读时间隙在t1时刻后t2时刻前有效。t2距t1为15us,也就是说,t2时刻前主机必须完成读位,并在t0后的 60us-120us内释放总线。 图3读时序 void system_init(void) { DDRD|=(1<<0); PORTD|=(1<<0); DDRD&=~(1<<1); PORTD|=(1<<1); PORTD|=(1<<2); DDRD&=~(1<<2); DDRD|=(1<<3); PORTD|=(1<<3); OCR0A=50; TCCR0A=(1< TCCR0B=(1< TIMSK0=(1< SEI(); } 设备初始化,对单片机I/O进行初始化,定义定时器0,CTC模式,8分频,T/C A比较中断 unsigned char get_pulse() { unsigned char return_val=0; if(yk_pulse_n==16) { if(yk_pulse==PULSE1) return_val=2; else if(yk_pulse==PU2LSE) return_val=1; yk_pulse_n=0; pulse_tick=0; } return return_val; } 获取脉冲函数,通过这个函数得到对应的脉冲,返回对应标志值,在主函数中进行判断。当脉冲等于16时,进行判断,脉冲数在最下面的程序中不断增加。接收到遥控脉冲1,返回2;接收到脉冲2,返回1。 #pragma interrupt_handler timer0_ctc_A:15 void timer0_ctc_A(void) { m_second10++; this_sign=PIND&0x04; if(this_sign==sign) { if(pulse_tick<250) pulse_tick++; } else if(yk_pulse_n<16) { if(pulse_tick>120) yk_pulse_n=0; else { yk_pulse=yk_pulse>>1; if(19 { yk_pulse|=0x8000; } yk_pulse_n++; } sign=this_sign; pulse_tick=0; } } 判断电平是否和上次的一样,是的话继续计数,然后判断计数值代表的时间,来判断是短脉冲还是宽脉冲;不是一样,说明电平变化了,对计数值代表的脉冲长度进行判断。是电平一样,是的话继续判断,计数不大于周期,因为有可能是周期间很长的间隙,不断计数,用来等下判断1还是0。电平开始变化,如果脉冲数小于16,不断自加,等于16时,会在上面程序进行判断是哪个脉冲串。电平变化后,也有可能是无效脉冲,比如一段脉冲的前后8ms间隙。脉冲数右移,第一次时,初始化yk_pulse为0x0000,有效宽脉冲,比短脉冲长比长脉冲短,实际利用检验方法把计数不断变小。如果是有宽脉冲那么最高位16位置位。不断加脉冲数,在上面的读脉函数get_pulse 函数如果等于16进行判断,返回标志值。把读到变化后电平值赋给标志电平位,以便下一次判断,计数清零。 2、PLC系统 (1)题目:吊机 (2)功能说明:用PLC控制直流小电机,实现吊机座的横纵向运动、吊机台的旋转运动以及吊重物的绳子的升降运动。 (3)完整电路原理图 输入: 输出: (4)流程图 (5)程序及每个函数的说明 初始化,先进行扫描,用移动字指令存取当前值 当按下按键1时,接通I0.0,启动计时器T32,以60ms为周期启动M10.0,当计时器T32大于VW20的值时,接通Q0.0,即电机1以某个速度正转。再按一下按键时,电机停下。 当按下按键2时,接通I0.1,启动计时器T33,以70ms为周期启动M10.1,当计时器T33大于VW22的值时,接通Q0.0,即电机1以某个速度反转。再按一下按键时,电机停下。(当电机反转时,如果按下按键1时,电机还是照常反转,不能切换成正转;正转时同理) 当按下按键时,将IN2加上IN1,重新定义OUT,使高电平的时间减少,达到转速变慢的效果。 当按下按键时,将IN2加上IN1,重新定义OUT,使高电平的时间增加,达到转速变快的效果。 网络10—网络15控制电机2;网络16—网络21控制电机3;网络22—网络27控制电机4。四个电机控制的原理是一样的。 当按下按键接通I1.3,复位。 三、设计结果与总结 开学前三周的课程设计结束了。对于这次的课程设计,自己感觉不满意,当然其中自己有很大的责任。单片机的自动散热器到离作品提交的两天前突然坏掉了,自己对硬件的检测还是存在很大的问题,经过两天的奋斗,还是没能把突然坏掉的自动散热器拯救过来。在这过程中,自己感觉到很多东西都要自己去学,很多元件我们以前都没有接触过,老师都没有教过,要自己上网去查,去问同学,问老师。红外接头信号的检测,继电器各脚的连接,DS18B20的连接 等等,都需要自己去学习。在制作的过程中,遇到很多问题,程序上的不懂,基础的薄弱,加剧了制作的难度,但是我们没有放弃,遇到不懂,我们会讨论,会去问同学,问老师,找到解决方法。一个组,最重要的是团结,大家一齐做事,齐心协力把任务做好,我们收获的不仅是知识,收获的还有我们的友谊。在整个过程中,让我学习到的是,遇到困难不要放弃,因为那正是考验你的时候,困难不可怕,我们要勇敢面对,知识不懂不要怕,我们有信心把它学习好。 不知不觉历时三个星期的课程设计已经结束了。我们经历了辛酸,但我们从中收获了知识。从设想到构思,从选择材料到采购材料,从焊接电路板到编写程序,每一步都需要我们认真细心去对待,每一步都需要我们亲自去体验。我们从中得到了实践,得到了锻炼,当然从中我们遇到了很多困难,譬如在这么短的时间内学习、编写以及调试PLC程序,而且只有6台PLC,我们组只在三个 星期内“玩”过两天的PLC,能完成PLC的系统,真的不容易啊。因此我要感 谢和我们共用一台PLC的其他三个组的同学,他们让我知道,团队合作不只是一个小组的事,不只是在一个小组之间体会出来,他们也让我明白团结精神在每个小组之间都传递着。