SSD OLED驱动芯片中文手册

简介
SSD1306是一个单片CMOS OLED/PLED驱动芯片可以驱动有机/聚合发光二极管点阵图形显示系统。由128 segments 和64 Commons组成。该芯片专为共阴极OLED面板设计。 SSD1306中嵌入了对比度控制器、显示RAM和晶振,并因此减少了外部器件和功耗。有256级亮度控制。数据/命令的发送有三种接口可选择:6800/8000串口,I2C接口或SPI接口。适用于多数简介的应用,注入移动电话的屏显,MP3播放器和计算器等。
特性
1.分辨率:128 * 64 点阵面板
2.电源:
a)VDD = 1.65V to 3.3V 用于IC逻辑
b)VCC = 7V to 15V 用于面板驱动
3.点阵显示
a)OLED驱动输出电压,最大15V
b)Segment最大电流:100uA
c)常见最大反向电流:15mA
d)256级对比亮度电流控制
4.嵌入式128 * 64位SRAM显示缓存
5.引脚选择MCU接口
a)8位6800/8000串口
b)3/4线SPI接口
c)I2C接口
6.水平和垂直两个方向的屏幕保存连续滚动功能。
7.RAM写同步信号
8.可编程的帧率和多重比率
9.行重映射和列冲映射
10.片上晶振
11.两种封装 COG和COF
12.工作温度范围广:‐40℃ to 85℃
订购信息
暂不翻译
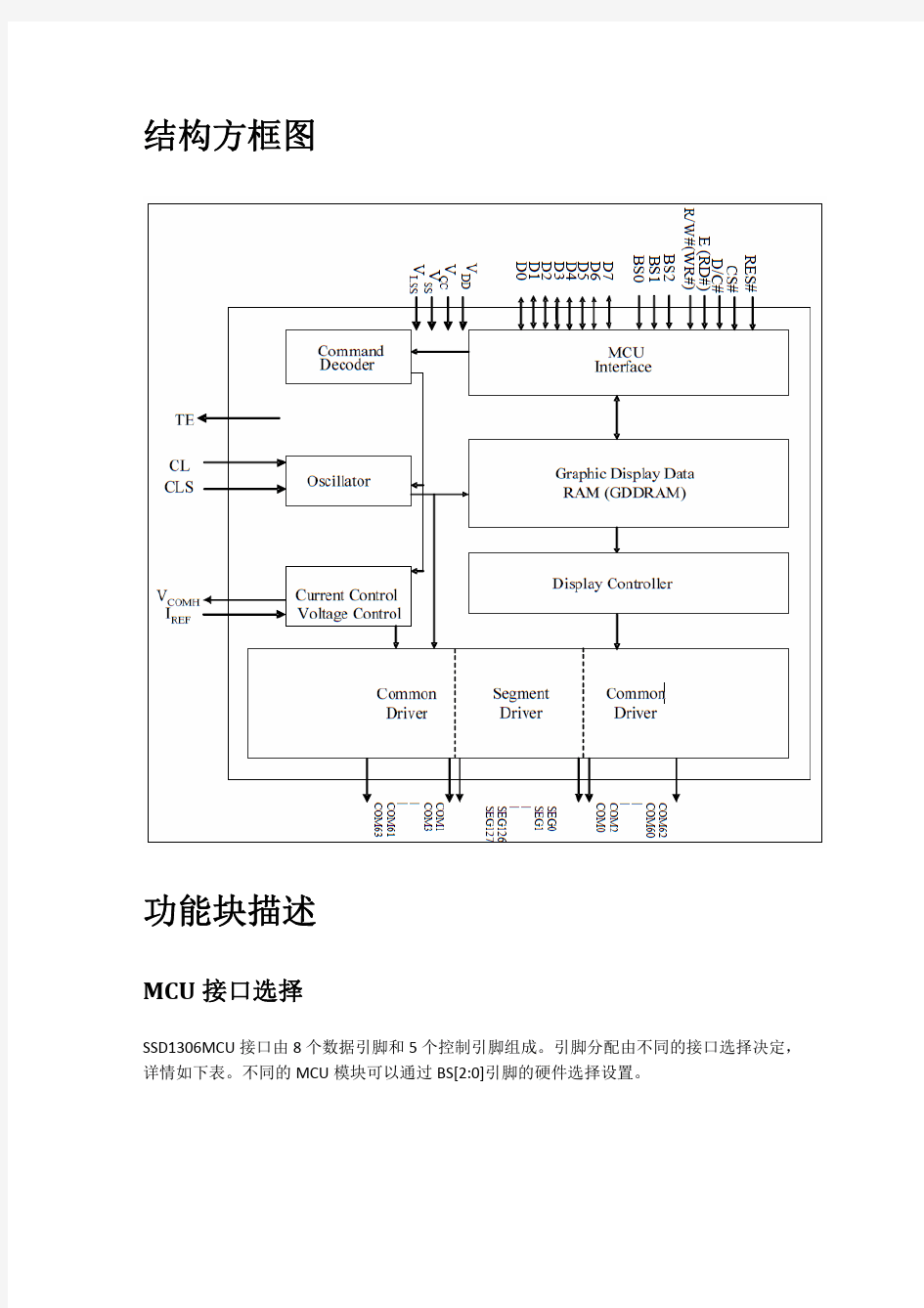
结构方框图
功能块描述
MCU接口选择
SSD1306MCU接口由8个数据引脚和5个控制引脚组成。引脚分配由不同的接口选择决定,
详情如下表。不同的MCU模块可以通过BS[2:0]引脚的硬件选择设置。
MCU 并口 6800系列接口
不翻译
MCU 并口8080系列接口
不翻译
MCU串口(4‐wire SPI)
不翻译
MCU串口(3‐wire SPI)
不翻译
MCU I2C 接口
I2C通讯接口由从机地址为SA0,I2C总线数据信号(SDAout/D2输出和SDAin/D1输入)和I2C 总线时钟信号SCL(D0)组成。数据和时钟信号线都必须接上上拉电阻。RES#用来初始化设备。
a.从机地址位(SA0)
SSD1306在发送或接受任何信息之前必须识别从机地址。设备将会响应从机地址,后面跟随着从机地址位(SA0位)和读写选择位(R/W#位),格式如下:
b7 b6 b5 b4 b3 b2 b1 b0
0 1 1 1 1 0 SA0 R/W#
SA0位为从机地址提供了一个位的拓展。0111100或0111101都可以做为SSD1306的从机地址。D/C#引脚作为SA0用于从机地址选择。R/W#为用来决定I2C总线接口的操作模式。R/W# = 1,读模式。R/W# = 0 写模式
b.I2C总线数据信号SDA
SDA作为发送者和接受者之间的通讯通道。数据和应答都是通过SDA发送。
应该注意的是ITO轨道电阻和SDA引脚上的上拉电阻会变成一个潜在的电压分压器。结
果就是SDA上的应答可能不能达到有效的逻辑0。
SDAin和SDAout绑定到了一起作为SDA。SDAin引脚必须连接到SDA。SDAout引脚可以不连接。当SDAout引脚不连接,应答信号将会被I2C总线忽略。
c.I2C总线时钟信号SCL
I2C总线上的信息传输任务是随着一个时钟信号的,SCL。每个数据位的传输任务发生在SCL的单个的时钟周期中。
I2C总线写数据
I2C总线接口提供了写数据和命令到设备的接口。关于I2C总线的写模式的时序请参考下图:
I2c的写模式
1.主机设备通过开始条件初始化数据通讯。开始条件的定义在下面的图中展示。开始条件
通过将SDA从高拉低而SCL保持高建立。
2.从机地址紧跟着开始条件作为标志用。对于SSD1306,从机地址可以是“b0111100”或
“b0111101”通过改变SA0到LOW或HIGH(D/C引脚作为SA0)。
3.写模式的建立是通过设置R/W#为到逻辑0实现的。
4.应答位信号将在接收到一个字节的数据后发生包括从机地址和R/W#位。可以参考下面
的应答位信号的图示。应答位的定义是在应答位相关的时钟脉冲的高周期中把SDA线拉低。
5.传输完从机地址之后,控制字节或数据字节开始通过SDA传输。一个控制字节主要由
CO和D/C#位后面再加上六个0组成的。
a)如果Co为设为逻辑0,,后面传输的信息就只包含数据字节。
b)D/C为决定了下个数据字节是作为命令还是数据。如果D/C#位设为0,下一个数据
就是命令。如果D/C#位设为1,下一个数据就是数据,将会存在GDDRAM中。
GDDRAM列地址指针将会在每次数据写之后自动加1.
6.应答位将会在接收到每个控制字节或数据字节之后发生
7.写模式会在用了停止条件之后结束。停止条件:将SDA从低拉高,而SCL保持高。
请注意数据位的传输是有限制的
1.数据位,在每个SCL脉冲阶段传输,必须在时钟脉冲高周期内保持稳定状态。可以参考
下面的图示。除了开始或停止条件,数据线只能在SCL为LOW的时候转换状态。
2.SDA和SCL都必须接外接上拉电阻
命令解码器
这个模块决定了输入数据被解读为数据还是命令。数据的解读是基于D/C#引脚的输入。
如果D/C#引脚是高,D[7:0]就被解读为写到图像显示数据RAM(GDDRAM)中的显示数据。 如果是低,D[7:0]的输入就被解读为一个命令。然后数据输入就会被解码并写到相关的命令寄存器中。
晶振电路和显示时间发生器
这是一个片上低功耗RC震荡电路。操作时钟(CLK)可以由内部震荡器或外部CL引脚生成。这个选择是通过CLS引脚完成的。当CLS引脚拉高,内部振荡器开启,CL应该保留开启。将CLS拉低可以静止内部振荡器,外部时钟必须连接到CL引脚上。当选择了内部振荡器之后,输出频率Fosc可以通过命令D5h A[7:4]修改。
用于显示时钟发生器的显示时钟(DCLK)是源于CLK的。分频因子“D”可以通过命令D5h 编程范围为1到16
DCLK = Fosc/D
显示的帧率是由下面的公式决定
D 代表时钟分频。由D5h A[3:0]设置。范围是1到16
K是每行显示时钟的数量。值的计算如下:
K = 相1周期 + 相2周期 + BANK0脉冲宽度 = 2 + 2 + 50 = 54 在上电重启时 Number of multiplex ratio 通过command A8h设置。上电重启值为63 。
Fosc 是振荡器频率,可以通过命令D5h A[7:4]修改。值越大频率越大。
FR同步
不翻译
重启电路
当RES# 输入为LOW时,芯片初始化为下面的状态:
1.显示关
2.128 * 64显示模式
3.正常的segment和显示数据列地址和行地址映射(SEG0映射到address 00h,COM0映射
到address 00h)
4.在串口中清除移位寄存器数据
5.显示开始行设置为显示RAM地址0
6.列地址计数设为0
7.正常扫描COM输出方向
8.对比度控制寄存器设为7Fh
9.正常显示模式(等同于A4h命令)
Segment 驱动/Common驱动
Segment驱动实现了128个电路源来驱动OLED面板。驱动电流的范围可以在0到100uA以内调节,有256个等级。Common驱动产生电压脉冲。
segment驱动波形分为3个阶段:
1.在阶段1,OLED用于显示上一个图片的像素停止充电目的是为了准备显示下一张图片的
内容。
2.在阶段2,OLED像素被充到目标电压。像素被从Vss驱动到相关电压水平。阶段2时间
可以通过编程在1到15个DCLK内变化。如果OLED面板的像素的电容值比较大,那么就需要更长的时间周期来给电容充电以达到想要的电压。
3.在阶段3,OLED驱动转换为使用电流源来驱动OLED像素,这就是电流源驱动阶段了。
当完成阶段3之后,驱动芯片会回到阶段1来显示下一行图像信息。这三部循环持续运行来刷新OLED面板上的图像显示。
在阶段3,如果电流驱动脉冲长度设为50,在电流驱动阶段完成50个DCLK后,驱动芯片回到阶段1准备下一行的显示。
图形显示数据RAM(GDDRAM)
GDDRAM是一个为映射静态RAM保存位模式来显示。该RAM的大小为128 * 64为,RAM 分为8页,从PAFE0到PAGE7,用于单色128 * 64点阵显示,如下图所示
当一个数据字节写到GDDRAM中,所有当前列的同一页的行图像数据都会被被填充(比如,被列地址指针指向的整列(8位)都会被填充)。数据位D0写到顶行,而数据位D7写到底行,如下图所示。
为了灵活性,segment和common上的重映射都可以通过软件选择。
对于显示的垂直移动,一个内部的寄存器保存了显示开始行可以用来设置控制RAM数据部分来映射显示(命令D3h)。
SEG/COM驱动块
不翻译
上电和断电顺序
不翻译
命令表
(D/C# = 0, R/W#(WR#) = 0, E(RD# = 1),除非有别的状态声明)
1.基本命令表
D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述
0 0 81
A[7:0]
1
A7
A6
A5
A4
A3
A2
A1
1
A0
设置对比度 双字节命令选择256级对
比度中的一种。对比度随
着值的增加而增加
(RESET = 7Fh)
0 A4/A5 1 0 1 0 0 1 0 X0整体显示开启
状态 A4h,X0 =0b:恢复RAM 内容的显示(RESET) 输出跟随RAM
A5h, X0 =1b:进入显示开启状态,输出不管RAM 内容
0 A6/A7 1 0 1 0 0 1 1 X0设置正常显示
或反相显示 A6h, X[0]=0b:正常显示(RESET)
在RAM中的0:在显示面板上为关
在RAM中的1:在显示面板上为开
A7h, X[0]=1b: 反相显示在RAM中的0:在显示面板上为开
在RAM中的1:在显示面板上为关
0 AE
AF 1 0 1 0 1 1 1 X0设置显示开或
关
AEh, X[0]=0b:显示关(睡
眠模式)
(RESET)
AFh X[0]=1b:显示开,正
常模式
2.滚屏命令
D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述
0 0 0 0 0 26/27
A[7:0]
B[2:0]
C[2:0]
D[2:0]
*
*
*
*
*
*
1
*
*
*
*
*
*
*
*
*
1
B2
C2
D2
1
B1
C1
D1
X0
B0
C0
D0
持续水平滚动
设置
26h, X[0]=0, 向右水平
滚动
27h, X[0]=1, 向左水平
滚动
(水平平移1列)
A[7:0] : 空字节
B[2:0] : 定义开始页地
址
000b – PAGE0 011b
–
PAGE3
110b
–
PAGE6
001b – PAGE1 100b
–
PAGE4
111b
–
PAGE7
010b – PAGE2 101b – PAGE5
C[2:0] : 在帧率范围内设置每次滚屏的时间间隔
000b – 5 frames 100b – 3 frames
001b – 64 frames 101b – 4 frames
010b – 128 frames 110b – 25 frame
011b – 256 frames 111b – 2 frame
D[2:0] : 定义结束页地址
000b – PAGE0 011b
–
PAGE3
110b
–
PAGE6
001b – PAGE1 100b
–
PAGE4
111b
–
PAGE7
010b – PAGE2 101b – PAGE5
D[2:0]的值必须大于或
等于B[2:0]
D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述
0 0 0 0 0 0 29/2A
A[2:0]
B[2:0]
C[2:0]
D[2:0]
E[5:0]
*
*
*
*
*
*
*
*
1
*
*
*
E5
*
*
*
E4
1
*
*
*
E3
B2
C2
D2
E2
X1
B1
C1
D1
E1
X0
B0
C0
D0
E0
持续垂直和水
平滚屏设置
29h, X1X0=01b : 垂直和
右水平滚屏
2Ah, X1X0=10b : 垂直和
左水平滚屏
(水平滚动一列)
A[7:0] : 空字节
B[2:0] : 定义开始页地
址
000b
–
011b
–
110b
–
PAGE0 PAGE3 PAGE6
001b – PAGE1 100b
–
PAGE4
111b
–
PAGE7
010b – PAGE2 101b – PAGE5
C[2:0] :在帧频范围内设置每次滚屏的时间间隔
000b – 5 frames 100b – 3 frames
001b – 64 frames 101b – 4 frames
010b – 128 frames 110b – 25 frame
011b – 256 frames 111b – 2 frame
D[2:0] :定义结束页地址
000b – PAGE0 011b
–
PAGE3
110b
–
PAGE6
001b – PAGE1 100b
–
PAGE4
111b
–
PAGE7
010b – PAGE2 101b – PAGE5
D[2:0] 的值必须大于
或等于B[2:0]
E[5:0] :垂直滚屏的位
移
比如
E[5:0]= 01h offset =1
row
E[5:0] =3Fh offset
=63 rows
注意
(1) 没有持续垂直滚屏功
能
D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述
0 2E 0 0 1 0 1 1 1 0 关闭滚屏 关闭因命令
26h/27h/29h/2Ah开启
的滚屏功能
注意:
在使用2Eh命令来关
闭滚屏动作后,RAM
的数据需要重写
D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述
0 2F 0 0 1 0 1 1 1 1 激活滚屏 开始滚屏,滚屏命令
26h/27h/29h/2Ah配置
的,有效的顺序是:
有效命令顺序1:26h;2Fh
有效命令顺序2:27h;2Fh
有效命令顺序3:29h;2Fh
有效命令顺序4:2Ah;2Fh
举例说明:如果发布命令
26h;2Ah;2Fh,那么最
后的一个滚屏命令会被
执行,在这里是2Ah。换
句话说最后的滚屏命令
会重写以前的滚屏设置
命令。
D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述
0 0 0 A3
A[5:0]
B[6:0]
1
*
*
*
B6
1
A5
B5
A4
B4
A3
B3
A2
B2
1
A1
B1
1
A0
B0
设置垂直滚动
区域
A[5:0]设置顶层固定的
行数。顶层固定区域的行
数参考GDDRAM的顶部(比
如row0)重置为0
B[6:0]设置滚动区域的
行数。这个行的数量用于
垂直滚动滚动区域。滚动
区域开始于顶层固定区
域的下一行。重置为64.
Note
1.A[5:0]+B[6:0]
<=MUX ratio
2.B[6:0] <= MUX ratio
3.垂直滚动偏移
(29h/2Ah命令中的
E[5:0])< B[6:0]
4.设置显示开始线
(40h~7Fh中的
X5X4X3X2X1X0)
5.滚动区域的最后一 行移动到滚动区域 的第一行 6.对于64d最大显示 A[5:0]= 0,B[6:0]= 64整个区域滚动 A[5:0]=0, B[6:0]<64顶层区域 滚动 A[5:0]+B[6:0]<64 中心区域滚动 A[5:0]+B[6:0]= 64 底部区域滚动 3.地址设置命令表 D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述 0 00~0f 0 0 0 0 X3X2X1X0设置低一点的 列的开始地址 作为页地址模 式 Set the lower nibble of the column start address register for Page Addressing Mode using X[3:0] as data bits. The initial display line register is reset to 0000b after RESET. 0 10~1F 0 0 0 2 X3X2X1X0设置列的高地 址作为页的开 始地址 Set the higher nibble of the column start address register for Page Addressing Mode using X[3:0] as data bits. The initial display line register is reset to 0000b after RESET. 0 0 20 A[1:0] * * 1 * * * * A1 A0 设置内存地址 模式 A[1:0] = 00b, Horizontal Addressing Mode A[1:0] = 01b, Vertical Addressing Mode A[1:0] = 10b, Page Addressing Mode (RESET) A[1:0] = 11b, Invalid 0 0 0 21 A[6:0] B[6:0] * * A6 B6 1 A5 B5 A4 B4 A3 B3 A2 B2 A1 B1 1 A0 B0 设置列地址 设置列的开始和结束 地址 A[6:0] : Column start address, range : 0-127d, (RESET=0d) B[6:0]: Column end address, range : 0-127d, (RESET =127d) D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述 0 0 0 22 A[2:0] B[2:0] * * * * 1 * * * * * * A2 B2 1 A1 B1 A0 B0 设置页地址 设置页的开始结束地址 A[2:0] : Page start Address, range : 0-7d, (RESET = 0d) B[2:0] : Page end Address, range : 0-7d, (RESET = 7d) 0 B0~B7 1 0 1 1 0 X2X1X0设置页开始地 址作为页地址 模式 Set GDDRAM Page Start Address (PAGE0~PAGE7) for Page Addressing Mode using X[2:0]. 硬件配置 D/C# Hex D7 D6 D5 D4 D3D2D1D0命令 描述 9.1数据读写 为了往GDDRAM中写数据,在6800系列并口和8080系列并口模式中将R/W#(WR#)引脚置低,D/C#引脚置高。串口模式总是处于写模式。GDDRAM列地址指针在写完一个数据之后会自动加一。 10 命令描述 10.1 基本命令 10.1.1 设置低列开始地址作为页地址模式(00h~0Fh) 10.1.2 设置高列开始地址作为页地址模式(10h~1Fh) 10.1.3 设置内存地址模式(20h) SSD1306中有三种不同的内存地址模式:页地址模式,水平地址模式,垂直地址模式。这个命令将内存地址模式设置成这三种中的一种。在这里COL的意思是图形显示数据RAM列。 页地址模式(A[1:0] =10xb) 在页地址模式下,在显示RAM读写之后,列地址指针自动加一。如果列地址指针达到了列的结束地址,列地址指针重置为列开始地址并且也地址指针不会改变。用户需要设置新的页和列地址来访问下一页RAM内从。页地址模式下PAGE和列地址指针的移动模式参考下图 在正常显示数据RAM读或写和页地址模式,要求使用下面的步骤来定义开始RAM访问的位 置: 1.通过命令B0h到B7h来设置目标显示位置的页开始地址 2.通过00h~0Fh来设置低开始列地址的指针 3.通过命令10h~1Fh来设置高开始列地址 比如说,如果页地址设置为B2h,低列地址是03h高列地址为00h,那么就意味着开始列是PAGE2的SEG3.RAM访问指针的位置如下图所示。输出数据字节将写到RAM列3的位置。 水平寻址模式(A[1:0]= 00b) 在水平寻址模式下,当显示RAM被读写之后,列地址指针自动加一。如果列地址指针达到列的结束地址,列地址指针重置为列的开始地址,并且页地址指针自动加1。水平寻址模式下页和列地址的移动顺序如下图所示。当列地址和页地址都达到了结束地址,指针重设为列地址和页地址的开始地址。 垂直寻址模式(A[1:0]=01b) 在垂直寻址模式下,当显示RAM被读写之后,页地址指针自动加一。如果页地址达到了页的结束地址,页地址自动重置为页的开始地址,列地址自动加一。页地址和列地址的移动顺序如下图所示。当列地址和页地址都达到结束地址后,指针自动重置为开始地址。 在正常显示RAM读或写,水平/垂直寻址模式下,要求用下面的步骤来定义RAM访问指针位置: 1.用21h命令设置目标显示位置的列的开始和结束地址; 2.用命令22h设置目标显示位置的页的开始和结束地址 10.1.4 设置列地址(21h) 这个三字节命令指定了显示数据RAM列开始地址和结束地址。这个命令也会设置列地址指针到列开始地址。这个指针用于定义当前读写的显示数据RAM列地址。如果用20h命令开启了水平寻址命令,在完成读写一个列数据之后,该指针就会自动指向下一列地址。当什么时候列地址指针完成了访问列结束地址,它就会返回到列开始地址,和行地址增加到下一行。 10.1.5 设置页地址(22h) 这个三字节的命令指定了显示数据RAM页的开始和结束地址。这个命令同时也设置了页地址指针到页开始地址。这个指针用来定义在图像显示数据RAM中当前读写的地址。如果当前是垂直寻址模式,在读写完一页数据之后,会自动增加到下一页地址。当页地址指针完成访问结束页地址之后,会重置到开始页地址。 下面的插图展示了列和页地址指针的移动方式:列开始地址设置为2,列结束地址设置为125,页开始地址设置为1,页结束地址设置为6;通过命令20h使能水平地址增加模式。在这个案例中,图形显示数据RAM可访问的地址就只有从列2到列125,页1到页6。另外,列地址指针被设为2页地址指针被设为1.在完成读写数据中的一个像素后,列地址自动加1到下一个RAM位置进行下一次读写操作。当列地址指针完成访问结束列地址125之后,重新回到列2,页地址自动加1。当结束页6和结束列125RAM位置被访问过之后,页地址设回1,列地址设回2。 10.1.6 设置显示开始行(40h~7Fh) 这个命令设置显示开始行寄存器来决定显示RAM的开始地址,通过选择0到63的值。当值为0是,RAM行0映射到COM0,当值为1时,RAM行1映射到COM0,以此类推。 10.1.7 为BANK0设置对比度控制(81h) 这个命令用来设置显示的对比度,该芯片有256级对比度,从00h到FFh。屏显输出电流随着对比度增大而增大。 10.1.8 设置Segment 重映射(A0h/A1h) 这个命令修改显示数据列地址和segment驱动器之间的映射,允许在OLED模块设置上的灵活性。 这个命令只影响后续的数据输出。早已存储在GDDRAM中的数据不会改变。 10.1.9 全部显示开启(A4h/A5h) A4h命令打开显示,输出依据GDDRAM中的内容。 如果使用A5h命令,然后再使用A4h命令,显示就会重覆盖为GDDRAM的内容。 换句话说,A4h命令从整体显示开启状态覆盖显示。 A5h命令轻质整体显示状态位开启,不管显示数据RAM中的内容。 10.1.10 设置正常/反相显示(A6h、A7h) 这个命令将显示设置成正常或反相模式。在正常模式1就是开,而在反相模式下1就是关 。 10.1.11 设置复用率(A8h) 这个命令转换默认的63复用模式到任何复用率,范围从16到63。输出pads COM0~COM63将会转换为相关的COM信号。 10.1.12 设置显示开、关(Aeh、AFh) 这个单字节命令用来打开或关闭OLED面板的显示。 当显示是ON,通过设置主机配置命令选择的电路会打开; 当显示为OFF时,这些电路会关闭,segment 和 common输出将处于高阻状态。这些命令设置显示的状态在开关之间切换: 10.1.13 设置页开始地址作为页寻址模式(B0h~B7h) …… 10.1.14 设置COM输出扫描方向(C0h、C8h) …… 10.1.15 设置显示偏移(D3h) 这是一个两字节的命令。第二个命令指定显示映射的开始行到COM0和COM63中的一个(假设COM0是显示的开始行,那么显示开始寄存器就等于0)。 比如为了将COM16向COM0方向移动16行,第二个字节六位数据就应该写成010000b。为了向相反方向移动16行,这个六位数据就应该是64‐16,所谓第二个字节应该是100000b。下面两个表展示了命令C0h/C8h和D3h的设置效果 10.1.16 设置显示时钟分频率、振荡器频率(D5h) 这个命令由两个功能组成: 显示时钟分频率D(A[3:0]) 设置分频率从CLK来生成DCKL(display clock)。这个分频率的范围为1到16,重置值为1.请参考8.3,获取DCLK和CLK关系的跟多细节 振荡器频率(A[7:4]) 如果CLS引脚置高编程后的振荡器频率Fosc就是CLK的源。这个4位的值设置16种不同的频率,默认设置为1000b。 10.1.17 设置重充电周期(D9h) 这个命令用于设置充充电周期的时间长度。间隔以计算DCLK的数量,重置值为2DCLK。 10.1.18 设置COM引脚硬件配置(DAh)。 这个命令设置COM信号引脚配置来匹配OLED面板硬件层。下面的表展示了不同条件下的COM引脚配置(服用率为64) 条件 COM引脚配置 置(Dah A[4] = 0) COM输出扫描方面, 从COM0到COM63 (C0h) 禁止COM左右重映 射(Dah A[5] = 0) 2 顺序COM引脚配 置(Dah A[4]= 0) COM输出扫描顺序: 从COM0到COM63 (C0h) 使能COM左右重映 射(Dah A[5]= 1) 第九届“飞思卡尔”杯全国大学生 智能汽车竞赛 技术报告 学校:武汉科技大学队 伍名称:首安二队参赛 队员:韦天 肖杨吴光星带队 教师:章政 0敏 I 关于技术报告和研究论文使用授权的说明 本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期: II 目录 第一章引言 (1) 1.1 概述 (1) 1.2 内容分布 (1) 第二章系统总体设计 (2) 2.1 设计概述 (3) 2.2 控制芯片的选择 (3) 2.3 线性 CCD 检测的基本原理 (3) 2.3 系统结极 (5) 第三章机械系统设计 (7) 3.1 底盘加固 (7) 3.2 轮胎处理 (7) 3.3 四轮定位 (8) 3.4 差速器的调整 (12) 3.5 舵机的安装 (13) 3.6 保护杆的安装 (15) 3.7 CCD的安装 (16) 3.8 编码器的安装 (17) 3.9 检测起跑线光电管及加速度计陀螺仪的安装 (18) 第四章硬件系统设计 (19) 4.1 最小系统版 (20) 4.2 电源模块 (21) 4.3 CCD模块 (22) 4.4 驱动桥模块 (23) 4.5 车身姿态检测模块 (24) 4.7 测速模块 (24) 4.8 OLED液晶屏及按键、拨码 (25) 第5章程序设计 (27) 力士乐报警代码及说明一揽 力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。DKC 故障诊断 1 诊断信息 F 和诊断信息 E 的说明 1.1 错误诊断信息 F F205 凸轮轴故障 F207 切换至未初始化运行模式 F208 UL 电机类型已变 F209 PL 装载参数默认值 F211 DISC-Error no.1(1#错误) F212 F212 F212 DISC-Error no.2(2#错误)DISC-Error no.3(3#错误)DISC-Error no.4(4#错误) F217 未接冷却风扇 F218 放大器过热关机 F219 电机过热关机 F220 制动电阻器过载关机 F221 电机温度监控器故障 F223 停止轴时的初始化过程错误 F224 超过最大制动时间 F226 功率部分欠电压 F228 过大偏差 F229 编码器 1 故障:象限错误 F230 超过编码器 1 最大信号频率 F236 位置反馈的差值过大 F237 位置指令的差值过大 F238 实际速度值的差值过大 F242 编码器 2 故障:信号幅度错误 F245 编码器 2 故障:象限错误 F246 超过编码器 2 最大信号频率 F248 电池电压过低 F249 主驱动器编码器故障:信号太小 F250 目标位置预置内存溢出 F252 主驱动器编码器故障:象限错误 F253 增量编码器仿真:脉冲频率太高 F260 指令电流极限关闭 F262 状态输出口出现外部短路 F267 内部硬件同步错误 F269 电机制动器释放过程中错误 F276 绝对编码器超出允许的窗口 F277 电流测量补偿错误 F281 主回路故障 F288 EMD 模块固件升级过程中出现错误 F291 EMD 模块超时 F292 EMD 模块过热 F294 Ecox 客户端超时 F296 Ecox 客户端数量不准确 F297 Ecox 客户端错误 F386 电源模块没有就绪信号 摘 1.1 专业课程设计题目 /*----------------------------------------------------------------------------------------------------------------------------- 桂林电子科技大学 物联网工程 Editor:JaceLin Date:2014.2.5 -------------------------------------------------------------------------------------------------------------------------------- 一、DMA特性 1)k60有16个DMA通道 二、寄存器 1)控制寄存器:DMA_CR 31-18 reserved 17 CX 取消转移,0正常操作,1取消剩下数据转移 16 ECX 错误取消转移,0正常操作,1取消转移 15-8 reserved 14 EMLM 使能副循环映射 0 禁止,TCDn.word2 为32位 1 使能,TCDn.word被重新定义 6 CLM 持续连接模式,0当副循环结束后,再次激活DMA要通过裁决,1不用裁决 5 HALT 停止DMA操作,0正常模式,1停止DMA操作 4 HOE 错误时停止,0正常操作,1当有错误时HALT=1,也就是DMA停止 3 reserved 2 ERCA 使能循环通道裁决, 1 EDBG 使能调试,写0,调试也用DMA,写1,调试时DMA不可用 0 reserved 2)错误状态寄存器DMA_ES 31 VLD 所有错误状态位逻辑或,0没有错误,1表示至少有1个错误没有清除 30-17 保留 16 ECX 转移被取消0没有被取消的转移,1最后一次记录是被取消的转移 15 保留 14 CPE 通道优先错误,0没有通道优先错误,1有 13-12 保留 11-8 ERRXHN 错误通道位/被取消的位(最多16位) 7 SAE 源地址错误,0没有源地址配置错误,1有错误 6 SOE 源偏移错误,0没有源偏移配置错误,1有偏移配置错误 5 DAE 目标地址错误,0没有错,1有错误 4 DOE 目标偏移错误,0没有错误,1有 3 NCE NBYTES/CITER配置错误,0没有,1有 2 SGE Scatter/Gather配置错误,0没有,1有 1 SBE 源总线错误,0没有错误,1有 74LS系列与CD系列芯片功能 反相器驱动器 LS04 LS05 LS06 LS07 LS125 LS240 LS244 LS245 与门与非门 LS00 LS08 LS10 LS11 LS20 LS21 LS27 LS30 LS38 或门或非门与或非门 LS02 LS32 LS51 LS64 LS65 异或门比较器 LS86 译码器 LS138 LS139 寄存器 LS74 LS175 LS373 74系列:: 74LS00 TTL 2输入端四与非门 74LS01 TTL 集电极开路2输入端四与非门 74LS02 TTL 2输入端四或非门 74LS03 TTL 集电极开路2输入端四与非门 74LS04 TTL 六反相器 74LS05 TTL 集电极开路六反相器 74LS06 TTL 集电极开路六反相高压驱动器 74LS07 TTL 集电极开路六正相高压驱动器 74LS08 TTL 2输入端四与门 74LS09 TTL 集电极开路2输入端四与门 74LS10 TTL 3输入端3与非门 74LS107 TTL 带清除主从双J-K触发器 74LS109 TTL 带预置清除正触发双J-K触发器 74LS11 TTL 3输入端3与门 74LS112 TTL 带预置清除负触发双J-K触发器 74LS12 TTL 开路输出3输入端三与非门 74LS121 TTL 单稳态多谐振荡器 74LS122 TTL 可再触发单稳态多谐振荡器 74LS123 TTL 双可再触发单稳态多谐振荡器 74LS125 TTL 三态输出高有效四总线缓冲门 74LS126 TTL 三态输出低有效四总线缓冲门 74LS13 TTL 4输入端双与非施密特触发器 74LS132 TTL 2输入端四与非施密特触发器 74LS133 TTL 13输入端与非门 74LS136 TTL 四异或门 74LS138 TTL 3-8线译码器/复工器 74LS139 TTL 双2-4线译码器/复工器 74LS14 TTL 六反相施密特触发器 74LS145 TTL BCD—十进制译码/驱动器 1.蓝色串口线为易损坏品,请拔下时先离线或者关闭软件 2.软件启动 双击桌面上的图标 3.软件启动后界面如下 如果没有出现左侧的PROJECT EXPLORE请按以下操作如有跳过 在菜单VIEW下选择并单击PROJECT EXPLORE 3.出现左侧的菜单后,点击图片中放大镜图标 出现下图对话框,请按下图选择IndraDrive(Serial RS232), 如果IndraDrive(Serial RS232)未在右侧框内,请在左侧框内找到并选择,然后点击框中间的指向右侧的三角,添加好后即为上图的样子。并点击NEXT 4.上一步点击NEXT后出现下图对话框, 下图左侧框为目前计算机上现有通讯端口,在其中选择当前与力士乐通讯所用端口并添加到右侧框内,添加方法同上步相同 其他选项同上图。通讯端口如果不知道具体是那个,就全部添加上。点击NEXT 5.如果扫描连接成功就会出现下图,如未找到请检查线连接是否正常,端口选择是否正确, 6.单击图片中的小加号展开项目 7.菜单键介绍 上图由左至右作用依次为,驱动器离线,在线,模拟在线,搜索设备,空,空,空,空,空,空,驱动器转为参数模式,驱动器转为操作模式 8.驱动器装态监控 操作方法,右键单击图中菜单中的AXIS在弹出菜单中依次如图中选择即可 出现的窗口数据从上到下依次为,当前位置,当前速度,当前加速度,当前电机负载 忘记截图了。。。。。。。。。 9.驱动器参数备份, 右键单击菜单中高亮部分,然后如图依次选择,并点击EXPORT,出现下图 单击左上角的三个小点,出现下图 在文件名中键入你想保存的文件名,在保存在中选择保存的路径。选择后点击保存然后会回到上一个窗口,点击EXPORT会出现 当这个窗口消失后,参数保存完成。 10.驱动器参数恢复(不建议使用) 选择后在下图中找到你保存的文件,点击打开。 出现下图对话框 1 Chapter1 Device Overview MC9S12P-Family 1.1介绍 The MC9S12P 系列单片机是经过优化后有着低成本、高性能、低引脚数的汽车专业级单片机产品,该产品倾向于弥补高端16位单片及产品如MC9S12XS和低端8位单片机产品之间的空缺。MC9S12P 主要针对于要求使用CAN 或者LIN/J2602通讯接口的汽车应用产品,典型的应用案例包括车身控制器、乘坐人员检测、车门控制、座椅控制、遥控车门开关信号接收器、智能执行器、车灯模块、智能接线器。 The MC9S12P 系列单片机使用了很多MC9S12XS系列单片机相同的功能,包括片内闪存错误纠正代码(ECC)、一个专为数据诊断或者数据存储的单独的数据闪存模块、高速AD转换器和高频调制锁相环(IPLL)有效改善电磁兼容性能。MC9S12P系列单片机提供的所有16为单片机优点和微处理器效率,同时保持飞思卡尔用户熟悉的8位及16位单片机,低成本,功耗,EMC和高效的代码80针QFP、64针LQFP、40针QFN封装产品,最大限度的与MC9S12尺寸的优点,如同MC9S12XS一样可以无需等待外围设备和内存的状态既可以运行16为带款的寻址,MC9S12P系列单片机主要有XS引脚兼容. I/O口在各种模式下都可以使用,同时具有中断功能的I/O口还可以在停止或等待模式下唤醒。 1.2 芯片特性 表一:提供了MC9S12P家庭成员特征摘要, 1.P或D寄存器擦除或者编程需要最低总线频率为1MHZ 1.2.2 芯片功能 ? S12 CPU 内核 ? 高达128 KB具有ECC功能的片上闪存 ? 4 Kbyte带ECC功能的数据闪存 ? 高达6 Kb片上静态存储器(SRAM) ? 具有内部滤波器的锁相环倍频器(IPLL) ? 4–16 MHz 皮尔斯振荡器 ? 1 MHz内部RC振荡器 ? 定时器(TIM) 具有16位输入捕捉、输出比较、计数器脉冲累加器功能 ? 具有8位6通道的脉冲调制模块(PWM) ? 10通道12位分辨率的逐次逼近AD转换器 ? 1个串行通信外部接口(SPI) ? 1个支持局域网通讯串行通信(SCI) 模块 ?一个多可扩展控制器区域网络(MSCAN) 模块(支持CAN 协议2.0A/B) ?片上电压调节器(VREG) 可对内部供电及内部电压整流 ? 自主周期中断(API) 1.3 模块特征 1.3.1 CPU S12 CPU 是一个高速的16位处理单元: ?全16-bit数据通道提供有效的数学运算和高速的数学执行 ? 包含很多单字节指令,可以有效的利用ROM空间 ? 宽域变址寻址功能: —采用堆栈指针作为所有变址操作的变址寄存器 —除了在自增或自减模式下都可以利用程序计数器作为变址寄存器 —使用A\B\D累加器做累加器偏移 —自动变址,前递增(++a)、前递减(--a)、后递减(a--)、后递增(a++)(by –8 to +8) 1.3.2 带ECC功能的片内闪存 ? 高达128 Kb程序闪存空间 — 32 位数据加7 位ECC (纠错码) 允许单字节纠错和双字节纠错 — 512字节擦出扇区空间 —自动编程和擦除算法 —用户设置读写页面边界 —具有可以防止偶然编程或者擦除的保护结构 ? 4 Kb 数据闪存空间 — 16 位数据加6位纠错码允许单字节和双字节纠错功能 — 256 字节的擦出扇区空间 —自动编程和擦除算法 —用户设置读写页面边界 1.3.3 片内静态存储器 飞思卡尔推出业界最强大的汽车动力总成系统微 控制器 2011-10-14 18:05:18 来源:与非网 关键字:飞思卡尔Qorivva MCU 动力总成控制系统 2011年10月12日-德国巴登(2011汽车电子系统展览会)–汽车厂商继续通过新的汽车设计将业界标准提升至新高度,通过交付具有更高燃油经济性和更低排放的汽车满足消费者的期望和政府的法规要求。高性能微控制器(MCU)在环保汽车设计领域扮演着重要角色,飞思卡尔半导体(NYSE:FSL)日前宣布推出强大的多核心汽车MCU系列中的第一款产品,帮助汽车设计者更加轻松地提高引擎效率并降低排放污染。 飞思卡尔新推出的多核心Qorivva 32位MPC5676R MCU在Power Architecture?技术的基础上构建,与上一代单核心MPC5566 MCU相比,性能提高了四倍、内存空间提高了一倍、并提供了更多功能。MPC5676R的多种优势允许全球汽车厂商在单一控制器中融合多种尖端技术,例如直喷、涡轮增压和有线系统全驱动。 飞思卡尔负责汽车MCU业务副总裁Ray Cornyn表示,“飞思卡尔充分了解帮助汽车厂商生产更加环保、燃油效率更高的汽车所需的关键技术及其重要性,长期以来我们一直与汽车行业合作,共同开发可以满足其最新一代设计需求的解决方案。在动力总成领域,我们的目标是生产最强大、最灵活的MCU,它可以同时管理最新引擎的所有复杂控制任务,为设计者提供了降低系统复杂性所需的工具和软件平台。” 90纳米双核心MPC5676R MCU配备了: ? 6 MB片上闪存 ?384 KB片上RAM ?三个高性能增强型时序处理器单元(eTPU) 力士乐驱动器使用说明书 本说明书针对非正弦用力士乐驱动器。主要讲述驱动软件的使用、参数配置、PID调节等。 一、软件使用 1.MLC04v16软件的安装 安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹, ?双击setup.exe进行安装,如图所示选择英文后,点Next ?按如图所示选择,点Next。 ?点击Next ?点击Next ?选择接受,后点击Next ?输入名称,点击Next ?选择安装目录,然后点击Next ?点Install ?安装进度如下:真个过程可能要10多分钟,看电脑性能。 ?完成窗口如下: ?完成后需要重启。点”是”自动重启,点”否”则不重启。 2.软件操作 ?打开软件 ●双击桌面快捷方式,如下图所示。 ●通过点击开始菜单->程序 ->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。 ?软件使用 ●工程的使用 如下图 点击Create an empty project为建立一个新工程。 点击Open project打开一个现有工程。 点击Scan for devices扫描串口总线上的设备 点击Restore project把保存的已压缩工程,解压缩。 点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。 点击File下拉菜单后,New:新建工程;Open:打开工程。 与伺服启动器联机 打开工程后变为 点黄色图标进入虚拟模式。 点蓝色图标连接实际驱动器。 如果端口配置正常则直接联机,否则会弹出如下窗口。 点击Scan for Device后弹出如下窗口 点Next后自动寻找设备。 未找到设备则弹出下面创库 飞思卡尔MC9S12XS128技术手册(AD转换部分) 英文资料:飞思卡尔MC9S12XS256RMV1官方技术手册 1.1 XS12系列单片机的特点 XS12系列单片机特点如下: ·16位S12CPU —向上支持S12模糊指令集并去除了其中的MEM, WAV, WAVR, REV, REVW 五条指令; —模块映射地址机制(MMC); —背景调试模块(BDM); ·CRG时钟和复位发生器 —COP看门狗; —实时中断; ·标准定时器模块 —8个16位输入捕捉或输出比较通道;; —16位计数器,8位精密与分频功能; —1个16位脉冲累加器; ·周期中断定时器PIT —4具有独立溢出定时的定时器; —溢出定时可选范围在1到2^24总线时钟; —溢出中断和外部触发器; ·多达8个的8位或4个16位PWM通道 —每个通道的周期和占空比有程序决定; —输出方式可以选择左对齐或中心对其; —可编程时钟选择逻辑,且可选频率范围很宽; ·SPI通信模块 —可选择8位或16位数据宽度; —全双工或半双工通信方式; —收发双向缓冲; —主机或从机模式; —可选择最高有效为先输出或者最低有效位先输出; ·两个SCI串行通信接口 —全双工或半双工模式 ·输入输出端口 —多达91个通用I/O引脚,根据封装方式,有些引脚未被引出; —两个单输入引脚; ·封装形式 —112引脚薄型四边引线扁平封装(LQFP); —80引脚扁平封装(QFP); —64引脚LQFP封装; ·工作条件 —全功率模式下单电源供电范围3.15V到5V; —CPU总线频率最大为40MHz —工作温度范围–40 C到125 C 第十章模拟—数字转换 10.1 介绍 ADC12B16C是一个16通道,12位,复用方式输入逐次逼近模拟—数字转换器。 ATD的精度由电器规格决定。 10.1.1 特点 ·可设置8位、10位、12位精度 ·在停止模式下,ATD转换使用内部时钟 ·转换序列结束后自动进入低耗电模式 ·可编程采样时间 ·转化结果可选择左对齐或右对齐 . 力士乐驱动器使用说明书 本说明书针对非正弦用力士乐驱动器。主要讲述驱动软件的使用、参数配置、PID调节等。 一、软件使用 1.MLC04v16软件的安装 安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹, ?双击setup.exe进行安装,如图所示选择英文后,点Next ?按如图所示选择,点Next。 ?点击Next . ?点击Next ?选择接受,后点击Next ?输入名称,点击Next ?选择安装目录,然后点击Next ?点Install ?安装进度如下:真个过程可能要10多分钟,看电脑性能。 ?完成窗口如下: ?完成后需要重启。点”是”自动重启,点”否”则不重启。 2.软件操作 ?打开软件 ●双击桌面快捷方式,如下图所示。 ●通过点击开始菜单->程序 ->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。 ?软件使用 ●工程的使用 如下图 点击Create an empty project为建立一个新工程。 点击Open project打开一个现有工程。 点击Scan for devices扫描串口总线上的设备 点击Restore project把保存的已压缩工程,解压缩。 点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。 点击File下拉菜单后,New:新建工程;Open:打开工程。 与伺服启动器联机 打开工程后变为 点黄色图标进入虚拟模式。 点蓝色图标连接实际驱动器。 如果端口配置正常则直接联机,否则会弹出如下窗口。 点击Scan for Device后弹出如下窗口 点Next后自动寻找设备。 未找到设备则弹出下面创库 第六届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告 学校: 队伍名称: 参赛队员: 带队教师: 关于技术报告和研究论文使用授权的说明 本人完全了解第六届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期: 摘要 随着现代科技的飞速发展,人们对智能化的要求已越来越高,而智能化在汽车相关产业上的应用最典型的例子就是汽车电子行业, 汽车的电子化程度则被看作是衡量现代汽车水平的重要标志。同时,汽车生产商推出越来越智能的汽车,来满足各种各样的市场需求。本文以第六届全国大学生智能车竞赛为背景,主要介绍了智能车控制系统的机械及硬软件结构和开发流程。 机械硬件方面,采用组委会规定的标准 A 车模,以飞思卡尔半导体公司生产的80管脚16 位单片机MC9S12XS128MAA 为控制核心,其他功能模块进行辅助,包括:摄像头数据采集模块、电源管理模块、电机驱动模块、测速模块以及无线调试模块等,来完成智能车的硬件设计。 软件方面,我们在CodeWarrior IDE 开发环境中进行系统编程,使用增量式PD 算法控制舵机,使用位置式PID 算法控制电机,从而达到控制小车自主行驶的目的。 另外文章对滤波去噪算法,黑线提取算法,起止线识别等也进行了介绍。 关键字:智能车摄像头图像处理简单算法闭环控制无线调试 第一章引言 飞思卡尔公司作为全球最大的汽车电子半导体供应商,一直致力于为汽车电子系统提供全范围应用的单片机、模拟器件和传感器等器件产品和解决方案。飞思卡尔公司在汽车电子的半导体器件市场拥有领先的地位并不断赢得客户的 74、74HC、74LS系列芯片资料 系列 电平 典型传输延迟ns 最大驱动电流(-Ioh/Lol)mA AHC CMOS 8.5 -8/8 AHCT COMS/TTL 8.5 -8/8 HC COMS 25 -8/8 HCT COMS/TTL 25 -8/8 ACT COMS/TTL 10 -24/24 F TTL 6.5 -15/64 ALS TTL 10 -15/64 LS TTL 18 -15/24 注:同型号的74系列、74HC系列、74LS系列芯片,逻辑功能上是一样的。 74LSxx的使用说明如果找不到的话,可参阅74xx或74HCxx的使用说明。 有些资料里包含了几种芯片,如74HC161资料里包含了74HC160、74HC161、 74HC162、74HC163四种芯片的资料。找不到某种芯片的资料时, 可试着查看一下临近型号的芯片资料。 7400 QUAD 2-INPUT NAND GATES 与非门 7401 QUAD 2-INPUT NAND GATES OC 与非门 7402 QUAD 2-INPUT NOR GATES 或非门 7403 QUAD 2-INPUT NAND GATES 与非门 7404 HEX INVERTING GATES 反向器 7406 HEX INVERTING GATES HV 高输出反向器 7408 QUAD 2-INPUT AND GATE 与门 7409 QUAD 2-INPUT AND GATES OC 与门 7410 TRIPLE 3-INPUT NAND GATES 与非门 7411 TRIPLE 3-INPUT AND GATES 与门 74121 ONE-SHOT WITH CLEAR 单稳态 74132 SCHMITT TRIGGER NAND GATES 触发器与非门 7414 SCHMITT TRIGGER INVERTERS 触发器反向器 74153 4-LINE TO 1 LINE SELECTOR 四选一 74155 2-LINE TO 4-LINE DECODER 译码器 74180 PARITY GENERATOR/CHECKER 奇偶发生检验 74191 4-BIT BINARY COUNTER UP/DOWN 计数器 7420 DUAL 4-INPUT NAND GATES 双四输入与非门 7426 QUAD 2-INPUT NAND GATES 与非门 7427 TRIPLE 3-INPUT NOR GATES 三输入或非门 7430 8-INPUT NAND GATES 八输入端与非门 7432 QUAD 2-INPUT OR GATES 二输入或门 7438 2-INPUT NAND GATE BUFFER 与非门缓冲器 7445 BCD-DECIMAL DECODER/DRIVER BCD译码驱动器 7474 D-TYPE FLIP-FLOP D型触发器 7475 QUAD LATCHES 双锁存器 7476 J-K FLIP-FLOP J-K触发器 7485 4-BIT MAGNITUDE COMPARATOR 四位比较器 7486 2-INPUT EXCLUSIVE OR GATES 双端异或门 //作者:徐成 //单位:湖北汽车工业学院科技学院 //时间:2013-7-25 //芯片:飞思卡尔mc9s12d64 //功能:让蜂鸣器作《生日快乐》 #include 力士乐报警代码及说明 一揽精编W O R D版 IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】 力士乐报警代码及说明一揽 力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。 DKC故障诊断1诊断信息F和诊断信息E的说明 1.1?错误诊断信息 FF205凸轮轴故障 F207切换至未初始化运行模式 F208UL电机类型已变 F209PL装载参数默认值 F211DISC-Errorno.1(1#错误) F212F212F212DISC-Errorno.2(2#错误)DISC-Errorno.3(3#错误)DISC-Errorno.4(4#错误) F217未接冷却风扇 F218放大器过热关机 F219电机过热关机 F220制动电阻器过载关机 F221电机温度监控器故障 F223?停止轴时的初始化过程错误F224超过最大制动时间 F226功率部分欠电压 F228?过大偏差 F229编码器1故障:象限错误 F230超过编码器1最大信号频率F236位置反馈的差值过大 F237?位置指令的差值过大 F238实际速度值的差值过大 F242编码器2故障:信号幅度错误 F245编码器2故障:象限错误 F246超过编码器2最大信号频率 F248?电池电压过低 F249主驱动器编码器故障:信号太小F250?目标位置预置内存溢出 F252主驱动器编码器故障:象限错误 F253增量编码器仿真:脉冲频率太高F260?指令电流极限关闭 F262状态输出口出现外部短路 F267内部硬件同步错误 F269电机制动器释放过程中错误 力士乐驱动器参数调试说明 本说明书针对非正弦用力士乐驱动器。主要讲述驱动软件的使用、参数配置、PID调节等。 一、软件使用 1.MLC04v16软件的安装 安装文件夹有CD1、CD2、CD3三个文件夹,打开CD1文件夹, ?双击setup.exe进行安装,如图所示选择英文后,点Next ?按如图所示选择,点Next。 ?点击Next ?点击Next ?选择接受,后点击Next ?输入名称,点击Next ?选择安装目录,然后点击Next ?点Install ?安装进度如下:真个过程可能要10多分钟,看电脑性能。 ?完成窗口如下: ?完成后需要重启。点”是”自动重启,点”否”则不重启。 2.软件操作 ?打开软件 ●双击桌面快捷方式,如下图所示。 ●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打 开。 ?软件使用 ●工程的使用 如下图 点击Create an empty project为建立一个新工程。 点击Open project打开一个现有工程。 点击Scan for devices扫描串口总线上的设备 点击Restore project把保存的已压缩工程,解压缩。 点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。 点击File下拉菜单后,New:新建工程;Open:打开工程。 与伺服启动器联机 打开工程后变为 点黄色图标进入虚拟模式。 点蓝色图标连接实际驱动器。 如果端口配置正常则直接联机,否则会弹出如下窗口。 点击Scan for Device后弹出如下窗口 点Next后自动寻找设备。 未找到设备则弹出下面创库 74系列芯片引脚图资料大全 作者:佚名来源:本站原创点击数:57276 更新时间:2007年07月26日【字体:大中小】 为了方便大家我收集了下列74系列芯片的引脚图资料,如还有需要请上电子论坛https://www.360docs.net/doc/2213777432.html,/b bs/ 反相器驱动器LS04 LS05 LS06 LS07 LS125 LS240 LS244 LS245 与门与非门LS00 LS08 LS10 LS11 LS20 LS21 LS27 LS30 LS38 或门或非门与或非门LS02 LS32 LS51 LS64 LS65 异或门比较器LS86 译码器LS138 LS139 寄存器LS74 LS175 LS373 反相器: Vcc 6A 6Y 5A 5Y 4A 4Y 六非门 74LS04 ┌┴—┴—┴—┴—┴—┴—┴┐六非门(OC门) 74LS05 _ │14 13 12 11 10 9 8│六非门(OC高压输出) 74LS06 Y = A )│ │ 1 2 3 4 5 6 7│ └┬—┬—┬—┬—┬—┬—┬┘ 1A 1Y 2A 2Y 3A 3Y GND 驱动器: Vcc 6A 6Y 5A 5Y 4A 4Y ┌┴—┴—┴—┴—┴—┴—┴┐ │14 13 12 11 10 9 8│ Y = A )│六驱动器(OC高压输出) 74LS07 │ 1 2 3 4 5 6 7│ └┬—┬—┬—┬—┬—┬—┬┘ 1A 1Y 2A 2Y 3A 3Y GND Vcc -4C 4A 4Y -3C 3A 3Y ┌┴—┴—┴—┴—┴—┴—┴┐ _ │14 13 12 11 10 9 8│ Y =A+C )│四总线三态门74LS125 │ 1 2 3 4 5 6 7│ └┬—┬—┬—┬—┬—┬—┬┘ -1C 1A 1Y -2C 2A 2Y GND 飞思卡尔智能车设计报告 目录 1.摘要 (3) 2.关键字 (3) 3.系统整体功能模块 (3) 4.电源模块设计 (4) 5.驱动电路设计 (4) 6.干簧管设计 (5) 7.传感器模块设计 (6) 8.传感器布局 (6) 9.软件设计 (7) 9.1控制算法 (7) 9.2软件系统实现(流程图) (10) 10.总结 (11) 11.参考文献 (12) 1.摘要 “飞思卡尔”杯全国大学生智能汽车竞赛是由教育部高等自动化专业教学指导分委员会主办的一项以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。该竞赛以汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的科技创意性比赛。 本文介绍了飞思卡尔电磁组智能车系统。本智能车系统是以飞思卡尔32 位单片机K60为核心,用电感检测赛道导线激发的电磁信号, AD 采样获得当前传感器在赛道上的位置信息,通过控制舵机来改变车的转向,用增量式PID进行电机控制,用编码器来检测小车的速度,共同完成智能车的控制。 2.关键字 电磁、k60、AD、PID、电机、舵机 3.系统整体功能模块 系统整体功能结构图 4.电源模块设计 电源是一个系统正常工作的基础,电源模块为系统其他各个模块提供所需要的能源保证,因此电源模块的设计至关重要。模型车系统中接受供电的部分包括:传感器模块、单片机模块、电机驱动模块、伺服电机模块等。设计中,除了需要考虑电压范围和电流容量等基本参数外,还要在电源转换效率、噪声、干扰和电路简单等方面进行优化。可靠的电源方案是整个硬件电路稳定可靠运行的基础。 全部硬件电路的电源由7.2V,2A/h的可充电镍镉电池提供。由于电路中的不同电路模块所需要的工作电流容量各不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。 电源模块由若干相互独立的稳压电源电路组成。在本系统中,除了电机驱动模块的电源是直接取自电池外,其余各模块的工作电压都需要经电源管理芯片来实现。 由于智能车使用7.2V镍镉电池供电,在小车行进过程中电池电压会有所下降,故使用低压差电源管理芯片LM2940。LM2940是一款低压稳压芯片,能提供5V的固定电压输出。LM2940低压差稳压芯片克服了早期稳压芯片的缺点。与其它的稳压芯片一样,LM2940需要外接一个输出电容来保持输出的稳定性。出于稳定性考虑,需要在稳压输出端和地之间接一个47uF低等效电阻的电容器。 舵机的工作电压是6伏,采用的是LM7806。 K60单片机和5110液晶显示器需要3.3伏供电,采用的是LM1117。 5.驱动电路设计 驱动电路采用英飞凌的BTS7960,通态电阻只有16mΩ,驱动电流可达43A,具有过压、过流、过温保护功能,输入PWM频率可达到25KHz,电源电压5.5V--27.5V。BTS7960是半桥驱动,实际使用中要求电机可以正反转,故使用两片接成全桥驱动。如图下图所示。 文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持. 力士乐驱动器参数调试说明 本说明书针对非正弦用力士乐驱动器。主要讲述驱动软件的使用、参数配置、PID调节等。 一、软件使用 1.MLC04v16软件的安装 安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹, ?双击setup.exe进行安装,如图所示选择英文后,点Next ?按如图所示选择,点Next。 ?点击Next ?点击Next ?选择接受,后点击Next ?输入名称,点击Next ?选择安装目录,然后点击Next ?点Install ?安装进度如下:真个过程可能要10多分钟,看电脑性能。 ?完成窗口如下: ?完成后需要重启。点”是”自动重启,点”否”则不重启。 2.软件操作 ?打开软件 ●双击桌面快捷方式,如下图所示。 ●通过点击开始菜单->程序->Rexroth-> ?软件使用 ●工程的使用 如下图 点击Create an empty project为建立一个新工程。 点击Open project打开一个现有工程。 点击Scan for devices扫描串口总线上的设备 点击Restore project把保存的已压缩工程,解压缩。 点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。 点击File下拉菜单后,New:新建工程;Open:打开工程。 ●与伺服启动器联机 打开工程后变为 点黄色图标进入虚拟模式。 点蓝色图标连接实际驱动器。 如果端口配置正常则直接联机,否则会弹出如下窗口。 点击Scan for Device后弹出如下窗口 点Next后自动寻找设备。 未找到设备则弹出下面创库 ●示波器功能 点Diagnostics下拉菜单,点击Oscilloscope 下图所示为示波器窗口。 采集时间配置: 智能车制作 F R E E S C A L E 学院:信息工程学院 班级:电气工程及其自动化132 学号:6101113078 姓名:李瑞欣 目录: 1. 整体概述 2.单片机介绍 3.C语言 4.智能车队的三个组 5.我对这门课的建议 一、整体概述 智能车的制作过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作。内容涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科多专业。 下面是一个智能车的模块分布: 总的来说智能车有六大模块:信号输入模块、控制输出模块、数据处理模块、信息显示模块、信息发送模块、异常处理模块。 1、信号输入模块: 智能车通过传感器获知赛道上的路况信息(直道,弯道,山坡,障碍物等),同时也通过传感器获取智能车自身的信息(车速,电磁电量等)。这些数据构成了智能车软件系统(大脑)的信息来源,软件系统依靠这些数据,改变智能车的运行状态,保证其在最短的时间内按照规定跑完整个赛道。 2、控制输出模块: 智能车在赛道上依靠转向机构(舵机)和动力机构(电机)来控制运行状态,这也是智能车最主要的模块,这个模块的好坏直接决定了你的比赛成绩。 电机和舵机都是通过PWM控制的,因此我们的软件系统需要根据已有的信息进行分析计算得到一个合适的输出数据(占空比)来控制电机和舵机。 3数据处理模块: 主要是对电感、编码器、干簧管的数据处理。信号输入模块得到的数据非常原始,有杂波。基本上是不能直接用来计算的。因此需要有信号处理模块对采集的数据进行处理,得到可用的数据。 4信息显示模块: 智能车调试过程中,用显示器来显示智能车的部分信息,判断智能车是否正常运行。正式比赛过程中可关闭。主流的显示器有:Nokia 5110 ,OLED模块等,需要进行驱动移植。飞思卡尔智能汽车设计技术报告
力士乐报警代码及说明一揽
基于嵌入式STM32的飞思卡尔智能车设计
要
飞思卡尔智能车大赛是面向全国大学生举办的应用型比赛, 旨在培养创新精 神、协作精神,提高工程实践能力的科技活动。大赛主要是要求小车自主循迹并 在最短时间内走完整个赛道。针对小车所安装传感器的不同,大赛分为光电组、 电磁组和摄像头组。 本文介绍了本院自动化系第一届大学生智能汽车竟赛的智能车系统。 包括总 体方案设计、机械结构设计、硬件电路设计、软件设计以及系统的调试与分析。 机械结构设计部分主要介绍了对车模的改进,以及舵机随动系统的机械结构。硬 件电路设计部分主要介绍了智能车系统的硬件电路设计, 包括原理图和 PCB 设计 智能车系统的软、 硬件结构及其开发流程。该智能车车模采用学校统一提供的飞 思卡尔车模,系统以 STM32F103C8T6 作为整个系统信息处理和控制命令的核心, 使用激光传感器检测道路信息使小车实现自主循迹的功能
关键字:飞思卡尔智能车STM32F103C8T6
激光传感器
第一章 概述
基于嵌入式 STM32 的飞思卡尔智能车设计
1.2 专业课程设计的目的与内容
1.2.1 目的 让学生运用所学的计算机、传感器、电子电路、自动控制等知识,在老师的 指导下,结合飞思卡尔智能车的设计独立地开展自动化专业的综合设计与实验, 锻炼学生对实际问题的分析和解决能力,提高工程意识,为以后的毕业设计和今 后从事相关工作打下一定的基础。 1.2.2 内容 本次智能车大赛分为光电组和创新做,我们选择光电组小车完成循迹功能。 该智能车车模采用学校统一提供的飞思卡尔车模, 系统以 STM32F103C8T6 作为整 个系统信息处理和控制命令的核心,我们对系统进行了创造性的优化: 其一, 硬件上采用激光传感器的方案, 软件上采用 keil 开发环境进行调试、 算法、弯道预判。 其二,传感器可以随动跟线,提高了检测范围。 其三,独立设计了控制电路板,充分利用 STM32 单片机现有模块进行编程, 同时拨码开关、状态指示灯等方便了算法调试。
1.3 方案的研讨与制定
1.3.1传感器选择方案 方案一:选用红外管作为赛道信息采集传感器。 由于识别赛道主要是识别黑白两种不同的颜色, 而红外对管恰好就能实现区 分黑白的功能,当红外光照在白色KT板上时,由于赛道的漫反射作用,使得一部 分红外光能反射回来, 让接收管接的输出引脚的电压发生变化,通过采集这个电 压的变化情况来区分红外光点的位置情况,以达到区分赛道与底板的作用。 红外管的优点在于价格便宜,耐用;缺点却用很多:1、红外光线在自然环 境中,无论是室内还是室外均比较常见,就使得其抗干扰能力不强,容易受环境 变化的影响。2、调试不方面,由于红外光是不可见光,调试的时候需要采用比 较麻烦的方法来判断光电的位置。3、由于红外管光线的直线性不好,就使得红 外传感器所能准确的判断的最远距离比较小,也就是通常所说的前瞻不够远。飞思卡尔K60 DMA 中文手册
74LS系列与CD系列芯片功能
力士乐驱动器调试指南
freescale MC9S12P128中文手册
飞思卡尔汽车芯片
力士乐驱动器使用说明.-共24页
飞思卡尔MC9S12XS128技术手册翻译AD
力士乐驱动器使用说明
飞思卡尔智能车技术报告
74、74HC、74LS系列芯片对照表
飞思卡尔mc9s12d64芯片奏乐
力士乐报警代码及说明一揽定稿版
力士乐驱动器使用说明
74LS系列芯片引脚图资料大全
飞思卡尔智能车设计报告
力士乐驱动器使用说明
飞思卡尔智能车简介