超声波电机的原理与应用

超声波电机的原理与应用
周传运
超声波电机(Ultrasonic Motor ,USM )是国外近20年发展起来的一种新型电机。事实上,在超声波电机问世之前,已有以压电效应驱动的电机,但其频率并不局限于超声波范围。早在1948年,威廉和布朗就申请了“压电马达”的美国专利;1964年,前苏联基辅理工学院设计了第一个压电旋转电机;1970~1972年,西门子公司和松下公司发明了压电步进电机,不过因无法达到较大的输出转矩而没能实际应用。1980年,日本的指田年生研制成超声波压电电动机(即现代意义上的超声波电动机),克服了传统压电电动机转换效率低和变位微小的缺陷,使压电电动机进入工业实用阶段。
一、超声波电机的原理和结构超声波电机的原理 超声波电机利用压电材料的逆压电效应①产生超声波振动,把电能转换为弹性体的超声波振动,并把这种振动通过摩擦传动的方式驱使运动体回转或直线运动。磁极和绕组,它一般由振动体②和移动体③组成,为了减少振动体和移动体之间相对运动产生的磨损,通常在二者间加一层摩擦材料。当在振动体的压电陶瓷(PZT )上施加20KHz 以上超声波频率的交流电压时,赫的超声波振动,使振动体表面起驱动作用的质点形成一定运动轨迹的超声波频率的微观振动(振幅一般为数微米),如椭圆、李萨如轨迹等,该微观振动通过振动体和移动体之间的摩擦作用使移动体沿某一方向做连续宏观运动。因此,超声波电机是将弹性材料的微观形变通过共振放大和摩擦耦合转换成转子或滑块的宏观运动。根据这一思想,日、德等国近几年相继研发出多种超声波电机,如环形行波USM 、步进USM 、多自由度USM 等,且行波型USM 已有较成熟的设计。下面以行波型USM 的
旋转说明其工作原理。
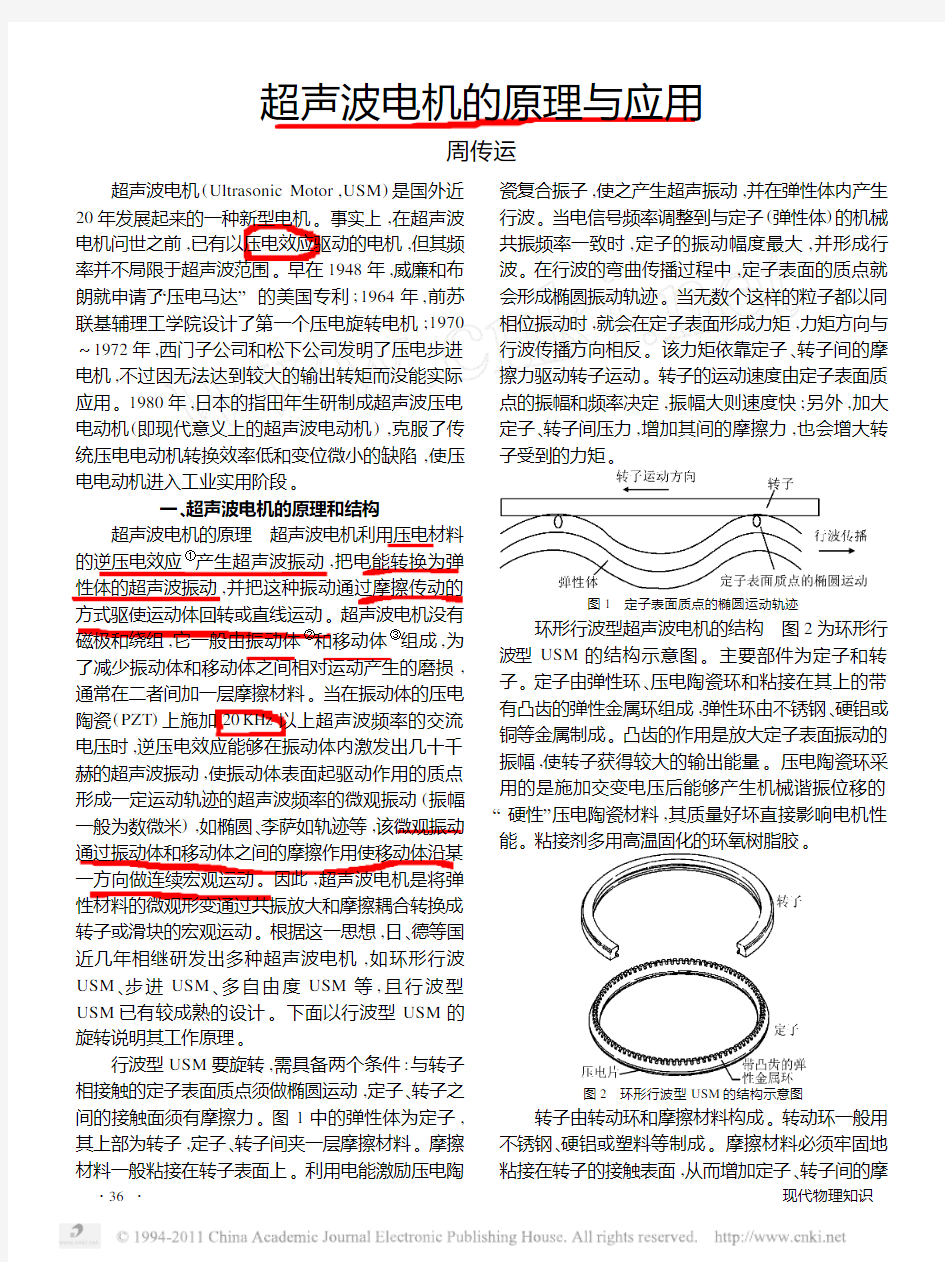
行波型USM 要旋转,需具备两个条件:与转子相接触的定子表面质点须做椭圆运动,定子、转子之间的接触面须有摩擦力。图1中的弹性体为定子,其上部为转子,定子、转子间夹一层摩擦材料。摩擦材料一般粘接在转子表面上。利用电能激励压电陶
瓷复合振子,使之产生超声振动,并在弹性体内产生
行波。当电信号频率调整到与定子(弹性体)的机械共振频率一致时,定子的振动幅度最大,并形成行波。在行波的弯曲传播过程中,定子表面的质点就会形成椭圆振动轨迹。当无数个这样的粒子都以同相位振动时,就会在定子表面形成力矩,力矩方向与行波传播方向相反。该力矩依靠定子、转子间的摩擦力驱动转子运动。转子的运动速度由定子表面质点的振幅和频率决定,振幅大则速度快;另外,加大定子、转子间压力,增加其间的摩擦力,也会增大转子受到的力矩。
图1 定子表面质点的椭圆运动轨迹
环形行波型超声波电机的结构 图2为环形行波型USM 的结构示意图。主要部件为定子和转子。定子由弹性环、压电陶瓷环和粘接在其上的带有凸齿的弹性金属环组成,弹性环由不锈钢、硬铝或铜等金属制成。凸齿的作用是放大定子表面振动的振幅,使转子获得较大的输出能量。压电陶瓷环采用的是施加交变电压后能够产生机械谐振位移的“硬性”压电陶瓷材料,其质量好坏直接影响电机性能。粘接剂多用高温固化的环氧树脂胶。
图2 环形行波型USM 的结构示意图
转子由转动环和摩擦材料构成。转动环一般用
不锈钢、硬铝或塑料等制成。摩擦材料必须牢固地粘接在转子的接触表面,从而增加定子、转子间的摩
?
63?现代物理知识
擦系数,一般为高聚物,多采用聚酰胺或某些树脂通过胶合芳香族聚酰胺纤维制成的片状合成塑料板。
二、超声波电机的技术特点
不受磁场干扰的影响 从其原理和结构可以看出,USM没有线圈与磁路,因而在运转时不受外界磁场影响,而且本身也不会产生磁场。在一些无法应用传统电磁电机的特殊场合———强磁场干扰和严格限制磁场等(如核磁共振装置、磁悬浮列车、严格消磁的精密仪器等必须采用电机的部位),USM都能一展身手。
能够直接驱动负载 现在我们常用的电磁电机,若要使其产生较大的转矩,必须采用减速机构,因转矩与电机的旋转速度成反比;而USM的转速一般较低,且能直接产生较大的转矩,无须减速机构,就可直接驱动负载,从而减少了减速机构所占用的体积,也使应用更具灵活性。据报道,浙江大学于2002年7月初步建立了大力矩USM数学模型,其力矩达1310N?m,该数值与1kW/380V四极三相异步电机的最大输出转矩相当。
断电后具有自锁功能 一般的电磁电机在断电后并不会立即停止,而USM在突然断电后会立即停止运转,不会因惯性继续运动。在需要移动定位的场合,USM的这一特点使其易于实现精确定位,精度可达到纳米级。
除此之外,USM还具有噪音低、重量轻、体积小、响应速度快、结构简单等一系列优点。然而由于USM依靠摩擦力驱动,导致功耗增加,同时摩擦生热也会造成PZT老化等一系列问题,从而限制了USM的推广应用。现阶段的USM寿命一般较短,同时也不适合高速旋转。USM的磨耗一直是研究者关注的焦点,如何减少磨耗、怎样由直接接触驱动改为间接驱动等问题,是国内外研究者的努力方向。
三、超声波电机应用范围及我国的现状
USM有望在各种工业控制装置、机器人、航空航天、家电产品、办公自动化设备、高精密仪器等方面替代现有传统电机所构成的驱动机构和伺服系统。日本有关专家预言:21世纪将是超声波电机广泛应用的时代。早在1994年,美国有关研究报告预计:在不远的将来,超声波电机将取代全部小型传统
电机。据文献报道,日本1994年超声波电机的市场规模已达200亿日元,2005年达1500亿~2500亿日元。日本佳能(CANON)公司最早将USM用于照相机的透镜驱动,因为USM可以做成中空结构,使对焦系统结构简单,而且直接驱动、自锁省去了减速机构,电机断电后会自动停止,照相机对焦快速、准确。扫描隧道显微镜(STM)也通过USM调焦,美国航空航天局用于检测宇宙飞船船舱外壁的多功能自动爬行系统中也采用USM。
USM的研究已引起我国的高度重视,一直作为基金重点支持项目。我国从20世纪90年代开始研究超声波电机,但还没有规模应用的产品。东南大学超声波电机研究小组从1995年开始研究超声波电机。在探索超声波电机结构原理、运行机理的基础上,进行了大量电机结构优化和性能提高方面的工作,研制成功了环形行波型、柱体摇摆型、三自由度球型和自校正步进型超声波电机等,其中的三自由度球形USM可用于机器人的关节部位,也可驱动摄像机进行广角度拍摄。2002年3月在清华大学周铁英教授指导下研发的微型USM获得成功,它仅重36毫克、长4毫米、直径1毫米。报道说:“装载超声马达的微型机器人,可以轻松地清除血管、心脏的堵塞,探测肠胃疾病,甚至可能做到把药物放到具体的病灶处”。
(山东省济宁职业技术学院 272037)
①材料因加电压而造成体积变化的效应称为逆压电效应。
②振动体相当于传统电机中的定子,由压电陶瓷和金属弹性体制成。
③移动体相当于传统电机中的转子。
封三照片说明
饮食男女,人之大欲存焉。现代化的飞速发展使生活节奏不断加快,轻松快捷地提高生活质量,已成为人们热切追求的目标。烹饪机器人的诞生给未来生活带来了变革。
这台名叫“爱可”的烹饪机器人能够模拟厨师工作,以炒、爆、煸的烹饪手法烹制美味的中国菜肴。顾客只需将“爱可”专用配菜盒装入其进料口,按指示屏简单操作,几分钟后一道美味的菜肴便完成了。相信在不久的将来,烹饪机器人将会走进您的生活。
(李博文)
?
7
3
?
19卷3期(总111期)
电机分类 结构和原理
电机知识学习总结 1基本知识介绍 1.1直流、单相交流、三相交流 1.2交流下有“同步和异步”的区别 同步异步指的是转子转速与定子旋转磁场转速是同步(相同)还是异步(滞后),因而只有交流能产生旋转磁场,只有交流电机有同步异步的概念。 同步电机——原理:靠“磁场总是沿着磁路最短的方向上走”实现转子磁极与定子旋转磁场磁极逐一对应,转子磁极转速与旋转磁场转速相同。特点:同步电机无论作为电动机还是发电机使用,其转速与交流电频率之间将严格不变。同步电机转速恒定,不受负载变化影响。 异步电机——原理:靠感应来实现运动,定子旋转磁场切割鼠笼,使鼠笼产生感应电流,感应电流受力使转子旋转。转子转速与定子旋转磁场转速必须有转速差才能形成磁场切割鼠笼,产生感应电流。 区别:(1)同步电机可以发出无功功率,也可以吸收;异步电机只能吸收无功。(2)同步电机的转速与交流工频50Hz电源同步,即2极电机3000转、4极1500、6极1000等。异步电机的转速则稍微滞后,即2极2880、4极1440、6极960等。(3)同步电动机的电流在相位上是超前于电压的,即同步电动机是一个容性负载。同步电动机可以用以改进供电系统的功率因素。 同步电机无法直接启动:刚通电一瞬间,通入直流电的转子励磁绕组是静止的,转子磁极静止;定子磁场立即具有高速。假设此瞬间正好定子磁极与转子磁极一一对应吸引,在定子磁极在极短的时间内旋转半周的时间之内,会对转子产生吸引力,半周之后将会产生排斥力。由于转子有转动惯量,转子不会转动起来,而是在接近于0的速度下左右震动。因此同步电机需要鼠笼绕组启动。转速差使其产生感应电流,而感应电流具有减小转速差的特性(四根金属棒搭成井形,内部磁场变密会减小面积,变疏会增加面积,阻止其变化趋势),因而会使转子转动起来,直到感应电流与转速差平衡(没有电流就不会有力,因而不会消除转速差,猜测与旋转阻力有关)。 1.3永磁、电磁、感磁(构成定子、转子) 永磁——永磁铁 电磁——通电线圈 感磁——无电闭合绕组、鼠笼 永磁和电磁大多数情况下可以互换,感磁需要有旋转磁场的场合才能用,在三相同步电机中经常作为启动与电磁/永磁共用于转子。 1.4有刷无刷 电机有刷和无刷对电机结构影响很大,刷指的是转子通电时的电刷换向器、或者滑环。
第二篇 超声波电机驱动原理
第二章超声波电机的驱动原理 本章从压电陶瓷的特性出发,系统地叙述了超声波电机中压电陶瓷的压电效应和逆压电效应,并对其相关的参数进行了系统的讨论。本章还将几何分析法和弹性动力分析法相结合,分析了定子表面质点的椭圆运动的形成,论述了行波型超声波电机的运行机理,为行波型超声波电机的建模、设计制作、实验研究以及驱动电源和控制系统的研究提供必要的理论指导。 2.1 压电效应与压电陶瓷[21-25] 压电陶瓷作为超声波电机能量转换的媒介,它起着为超声波电机提供驱动力的重要作用,如同人体的心脏一样。因此,研究超声波电机就必须对压电材料特性有深入的认识和了解,才能掌握超声波电机的运行机理并能正确地选择和使用压电材料。在研究超声波电机的驱动机理前,首先从压电陶瓷与普通陶瓷的最重要的区别——压电效应开始。 2.1.1 压电效应 压电效应(Piezoelectric Effect)早在1880年,法国的两位科学家——居里(Curie)兄弟,在研究石英晶体的物理性质时,发现了一种特殊的现象,这就是若按某种方位从石英晶体上切割下一片薄晶片,在其表面上敷上电极,当沿着晶片的某些方向施加作用力而使晶片产生变形后,会在两个电极表面上出现等量的正、负电荷。电荷的面密度与施加的作用力的大小成正比;作用力撤销后,电荷也就消失了。这种由于机械力的作用而使晶体表面出现电荷的现象,称为正压电效应,如图2-1所示。后来人们又在其它一些晶体上进行了类似的实验,发现有许多晶体都具有这种现象。这些具有压电效应的晶体统称为压电晶体。发现正压电效应的第二年,也就是1881年,由李普曼在理论上预言,由居里兄弟在实验上证实了另一种物理现象:将压电晶体置于外电场中,由于电场的作用,会使 图2-1 正压电效应示意图图2-2 逆压电效应示意图 (实线代表变形前的情况,虚线代表变形后的情况)
超声电机
超声电机 请注意:所有项目介绍内容必须进行非密化处理。 一、项目简介(包括项目背景、现状与前景) (项目背景) 超声电机(Ultrasonic Motor,或简写为USM)是利用压电材料的逆压电效应,使弹性体(定子),在超声频段产生微米级的机械振动,通过定子和转子(或动子)之间的摩擦作用,将定子的微米级振动转换成转子(或动子)的宏观的单方向转动(或直线运动)。它打破了由电磁效应获得转速和转矩的传统电机的概念。它与传统的电磁电机相比,有一些独特的性能。因此,超声电机技术在20世纪末期得到迅速的发展,并在航空航天、机器人、汽车、精密定位仪、微型机械等领域里得到成功的应用,成为当今国内外微特电机领域研究的热点之一。 (项目现状,包括成熟程度) 南京航空航天大学超声电机研究中心暨江苏省超声电机工程研究中心在国家自然科学基金、学校学科建设的支持下,全面开展了超声电机技术研究。在超声电机的运动机理、机电耦合动力学模型、结构参数优化设计、驱动与控制等方面提出了系统的理论和方法,取得了突破性进展,获得国际同行的赞许。广泛开展了超声电机试验技术、制造技术和工程化研究。先后研发出16种具有自主知识产权的新型超声电机和驱动器,其中TRUM圆板式和BTRUM圆杆式二个系列旋转行波型超声电机技术成熟,正进行产业化开发,并向国内外推广应用。 (项目前景) 21世纪将是超声电机大放光芒的时代,为了发展我国人造卫星、导弹、火箭、飞机、机器人、微型机械、汽车、磁浮列车以及其他精密仪器,我国也将需要大量的高性能超声电机。随着超声电机的进一步微型化,微型机械则可进入人体更多的部位,如作为人造心脏的驱动器,推动人造器官的发展。未来的汽车需要的电机可多达80个,汽车门锁、玻璃升降、前视镜和雨刮器等,均可由超声电机来驱动。掌上计算机、可视电话电视、手提式仪器都可用超声电机,这样可以大大减小其体积和面积。 二、项目合作基础(包括①已承担各类基础、应用项目;②已获专利、奖项及论文发表情况;③研究团队介绍) 南京航空航天大学超声电机研究中心于1997年由赵淳生院士创建。它是国内第
无刷直流电机工作原理详解
无刷直流电机工作原理详解 日期: 2014-05-28 / 作者: admin / 分类: 技术文章 1. 简介 本文要介绍电机种类中发展快速且应用广泛的无刷直流电机(以下简称BLDC)。BLDC被广泛的用于日常生活用具、汽车工业、航空、消费电子、医学电子、工业自动化等装置和仪表。顾名思义,BLDC不使用机械结构的换向电刷而直接使用电子换向器,在使用中BLDC相比有刷电机有许多的优点,比如: 能获得更好的扭矩转速特性; 高速动态响应; 高效率; 长寿命; 低噪声; 高转速。 另外,BLDC更优的扭矩和外形尺寸比使得它更适合用于对电机自身重量和大小比较敏感的场合。 2. BLDC结构和基本工作原理 BLDC属于同步电机的一种,这就意味着它的定子产生的磁场和转子产生的磁场是同频率的,所以BLDC并不会产生普通感应电机的频差现象。BLDC中又有单相、2相和3相电机的区别,相类型的不同决定其定子线圈绕组的多少。在这里我们将集中讨论的是应用最为 广泛的3相BLDC。 2.1 定子 BLDC定子是由许多硅钢片经过叠压和轴向冲压而成,每个冲槽内都有一定的线圈组成了绕组,可以参见图2.1.1。从传统意义上讲,BLDC的定子和感应电机的定子有点类似,不过在定子绕组的分布上有一定的差别。大多数的BLDC定子有3个呈星行排列的绕组,每 个绕组又由许多内部结合的钢片按照一定的方式组成,偶数个绕组分布在定子的周围组成了偶数个磁极。
BLDC的定子绕组可以分为梯形和正弦两种绕组,它们的根本区别在于由于绕组的不同连接方式使它们产生的反电动势(反电动势的相关介绍请参加EMF一节)不同,分别呈现梯形和正弦波形,故用此命名了。梯形和正弦绕组产生的反电动势的波形图如图2.1.2和图 2.1.3所示。
超声波电机的设计
任务书 论文(设计)题目:超声波电机的设计 学号:姓名:专业: 指导教师:系主任: 一、主要内容及基本要求 超声波电机是国内外日益受到重视的一种新型驱动电机,通过查找相关文献,熟悉其工作原理和运行机理,结合本科所学机械各学科方面的知识,完成超声波电机结构部分的设计。 主要研究内容包括以下几个方面:1超声波电机的运行机理。2定子谐振频率的计算。3压电陶瓷换能器的设计和制作。4定子的设计及制作。5转子的设计及制作。6编写设计说明书:设计说明书按设计程序编写。 基本要求:学习查阅文献,具备综合归纳资料的能力;综合运用本科阶段所学知识,分析与解决超声波电机结构设计过程中所遇问题;并利用AutoCAD软件绘制了其装配图和各个零件图;通过翻译3000字的外文资料获取国外在该行业的最新发展动态。 二、重点研究的问题 理解超声波电机的工作原理和运行机理,弄清其结构特点,定子谐振频率的计算,定子的设计及制作,转子的设计及制作;理解超声波压电陶瓷和压电振子的特性,弄清超声波电机的振动特性及动力响应特性;理解超声波电机的驱动和控制及超声波电机的分析与设计。设计一台超声波电机。 三、进度安排
序号各阶段完成的内容完成时间 1 选题第1周 2 查阅与收集资料第2~5周 3 超声波电机结构的设计第6~9周 4 完成所要求图纸第10~11周 5 完成设计说明书第12~13周 6 进行最后的修改第14周 7 答辩第15周 四、应收集的资料及主要参考文献 [1] 刘晋春,特种加工,第五版[M].机械工业出版社.2008 [2] 史敬灼,超声波电机运动控制理论与技术.北京:科学出版社.2011.10 [3] 胡敏强,金龙,顾菊平,超声波电机原理与设计. 北京: 科学出版社.2005 [4] 姜楠,方光荣,刘俊标,束娜. 国内外超声波电动机驱动技术的最新进展. 微特电机. 2005.9 [5] 赵淳生,对发展我国超声电机技术的若干建议.微电机.2006 [6] 胡敏强,超声电动机的研究及其应用[J].微特电机.2000 [7] 淮良贵,纪名刚,机械设计,第六版[M].北京:高等教育出版社,1996 [8] 郑凯,杨义勇,胡仁喜.Solid Edge应用教程[M].清华大学出版社,2008.4 [9] 芦亚萍,孟繁琴,袁云龙.超声波电机研究现状.微电机.2005 [10] 杨明,阙沛文. 超声电机变频驱动源的设计与分析. 压电与声光。 [11] 顾绳谷,电机及拖动基础,第四版[M]. 机械工业出版社.2007.10 [12]罗宗泽,罗圣国.机械设计课程设计手册[M].高等教育出版社,2006.5
超声波电动机
微特电机课程论文超声波电动机 学院: 专业班级: 学号: 姓名: 指导教师: 日期:
摘要:超声波电机是一个机电耦合系统,涉及到振动学、摩擦学、材料学、电力电子技术、自动控制技术和实验技术等。超声波电动机利用压电材料的逆压电特性,激发电机定子的机械振动,通过定转子之间的摩擦力,将电能转换为机械能输出,驱动转子的定向运动。与传统电机相比,它具有体积小、低速大转矩、反应速度快、不受磁场影响、保持力矩大等优点,是一项跨学科的高新技术。近几年来超声波电动机已成为国内外在微型电机方面的研究热点。超声波电机(Ultrasonic Motor,简称USM)是20世纪80年代中期发展起来的一种全新概念的新型驱动装置。 超声波电机是利用压电陶瓷的逆压电效应——在交变电场作用下,陶瓷会产生伸缩的现象——直接将电能转变成机械能,这种电机的工作频率一般在20kHz以上,故称为压电超声波电机。 超声波电动机的不同命名:如振动电动机(Vibration Motor)、压电电动机(Piezoelectric Motor)、表面波电动机(Surface Wave Motor)、压电超声波电动机(Piezoelectric Ultrasonic Motor)、超声波压电驱动器/执行器(Ultrasonic piezoelectric actuator)等等。 关键字:超声波电机、逆压电效应、机械振动、高新技术。 0引言 超声波电动机的概念出现于1948年,英国的Williams和Brown申请了“压电电动机(Piezoelectric Motor)”的专利,提出了将振动能作为驱动力的设想,然而由于当时理论与技术的局限,有效的驱动装置未能得以实现。1961年,Bulova Watch Ltd.公司首次利用弹性体振动来驱动钟表齿轮,工作频率为360Hz,这种钟表走时准确,每月的误差只有一分钟,打破了那个时代的纪录,引起了轰动。前苏联学者V. V. Lavrinenko 于1964年设计了第一台压电旋转电机,此后前苏联在超声波电机研究领域一度处于世界领先水平,如设计了用于微型机器人的有2 或3 个自由度的超声波电机、人工超声肌肉及超声步进电机等。不过,由于语言等方面的原因, 前苏联的一些重要研究成果并未被西方科学界所充分了解。1969 年,英国Salfod 大学的两名教授介绍了一种伺服压电电机,这种电机采用二片式压电体结构,其速度、运动形式和方向都可以任意变化,响应速度也是传统结构电机所不能及的。美国IBM 公司的Barth 也在1973 年提出了一种超声波电动机的模型,从而使这种新型电机可以实现真正意义上的工作。 1978年,前苏联的Vasiliev成功地构造了一种能够驱动较大负载的压电超声波电动机,这种电机使用由位于两个金属块之间的压电元件所组成的超声换能器,将该换能器激起与转子接触的振动片纵向振动,通过振动片与转子间的摩擦来驱动转子转动。这种结构的优点在于不仅能降低共振频率,而且能放大振幅,遗憾的是,这种电机在运转时由于温度的升高、摩擦及磨损等原因,很难保持振动片的恒幅振动。 1982年,Sashida又提出并制造了另一台超声波电动机——行波型超声波电动机,从原来的由驻波定点、定期推动转子变换成由行波连续不断地推动转子,大大地降低了定子与转子接触面上的摩擦和磨损。这种电机能够运转的实质就是定子表面的质点形成了椭圆运动。之后,在日本掀起了利用各种振动模态的研究热潮,如利用纵向、弯曲、扭转等振动来获得椭圆运动。这种电机的研究成功,为超声波电动机走向实用阶段奠定了基础。1987年,行波超声波电动机终于达到了商业应用水平。此后许多超声波电动机新产品不断地研制出来并推向市场。
周铁英超声电机的发展与展望
超声电机的发展与展望周铁英陈宇 (清华大学物理系, 北京100084) 1 引言和回顾超声电机是利用压电材料的逆压电效应制成的新型驱动器。它由定子、转子以及施加预压力的机构等部件构成。把超声频交变电压加在压电陶瓷上可以在定子表面产生超声振动,通过定子与转子之间的摩擦力驱动转子运动[1-2]。超声电机是多学科交叉的学科,它集超声学、振动学、材料学、摩擦学、电子学和控制科学为一体,需要众多领域合作研究。与电磁电机相比,超声电机的主要特点包括:1、大力矩低转速,不需减速机构;2、能量密度大,可达电磁电机的3-10倍;3、响应速度快,仅ms量级;4、定位精度高;5、无电磁干扰;6、因靠摩擦驱动,具有自锁功能。国际上第一个超声电机的发明专利是1942年美国人Williams 和Brown 申请的,该专利1948年授权[3]。1982年日本成功地开发出行波型超声波电动机, 仅在5至7年之后,佳能、新生等几家日本公司就把超声波电动机推向市场,其中相机和打印机最为成熟。近期FUKOKU、ASUMO、精工仪器、佳能精机、京瓷、奥林巴斯光学工业、MITSUBA,SIGMAPHOTO(适马镜头)等单位都引入了超声电机的研发。图1是1998年日本超声电机投放市场的分布图[4],其中照相机和工业机械的市场占有率为88.2%,医疗器械 5.9%,汽车电器3.6%。 1.50.73.65.9照相机工业机器22.6医疗器械汽车住宅设备65.6其他图1 1998年日本超声电机投放市场的分布图如图1所示,日本用于照相机调焦的主要超声电机是佳能使用的行波型和摇头型,有数百个专利,基本形成市场的垄断。现在, 除了日本之外, 美国、德国、法国、瑞士、韩国、土耳其、新加坡等都有超声电机产品进入市场。美国的一
什么叫超声波电动机
什么叫超声波电动机? 2009年10月14日 超声波电动机是20世纪末发展起来的一种新的微型驱动电机,它的基本结构及工作原理与传统电机完全不同,没有绕组和磁路,不以电磁相互作用来传递能量,而是基于压电材料的逆压电效应(即电致伸缩效应),利用超声波振动来实现机电能量转换。由于这种新型电机的工作频率一般在20kHz以上,因此称为超声波电机。 超声波电机打破了传统电机必须由电磁效应产生转矩和转速的固有概念。与电磁式电机相比.超声波电机具有以下特点: (1)体积小,重量轻。超声波电机不用线圈,没有绕组和磁路,结构简单、紧凑,与电磁式电机相比,在输出转矩相同的情况下,可以做得更小、更轻、更薄。超声波电机的转矩密度一般为电磁式电机的几倍到十几倍。 (2)低速大转矩。超声波电机的最大优点在于它能以极低的速度运行.很容易做到每分钟几十转(甚至更低),并且能保持大转矩的输出。这样就无需齿轮减速机构,可实现对较大负载的直接驱动。 (3)响应迅速,控制特性好。超声波电机转子的质量较轻,惯性小,响应速度快,起动和制动的时间均为毫秒级,因此可以实现高精度的速度控制和位置控制。 (4)有断电自锁功能。由于超声波电动机是依靠定、转子间的摩擦力驱动的,因此定、转子间必须施加一定的轴向压力,以便将压电振子的振动转换为转子的旋转。这样当切断电源时·由于静摩擦力的作用,转子便可自锁。 (5)与外界无相互电磁干扰。超声波电机无需励磁.因此它不受外界电磁场的影响。同时,它对外界也不会产生电磁干扰,特别适合于强磁场的工作环境。 (6)结构形式多样化。由于超声波电机是将压电振子的机械能通过定、转子之间的摩擦传递给转子,转子可以做旋转运动,也可以做直线运动(这时应称为动子).因此转子
电动机的工作原理及其在生活中的应用
电动机是第二次科技革命中的最重要的发明之一,它至今仍在我们的社会生产、生活中起着极为重要的作用,机床、水泵,需要电动机带动;电力机车、电梯,需要电动机牵引。家庭生活中的电扇、冰箱、洗衣机,甚至各种电动玩具都离不开电动机。电动机已经应用在现代社会生活的各个方面。 对于电动机的工作原理,我引用了中学课本中的以下内容。我们知道,磁体在磁场中会受到力的作用。通电螺线管有磁性,像一个磁体,也会受到磁场的作用力。电动机就是利用这一原理制成的。 实际的直流电动机都有多个线圈,每个线圈都接在一对换向片上。有的直流电动机还用电磁铁来产生强磁场。 电动机构造简单、控制方便、体积小、效率高、功率可大可小,广泛地应用在社会生活中。以下我简单地说明一下电梯、手机震动以及冰箱压缩机的工作原理。 电梯在工作时,曳引绳两端分别连着轿厢和对重,缠绕在曳引轮和导向轮上,曳引电动机通过减速器变速后带动曳引轮转动,靠曳引绳与曳引轮摩擦产生的牵引力,实现轿厢和对重的升降运动,达到运输目的。 手机震动利用的是偏心电动机,也就是普通电动机头上装了一个凸轮,而凸轮的重心并不在电动机的转轴上,在转动时,由于离心力的作用,拿在手机里的手机就感觉是振动了。 冰箱和空调都是利用制冷压缩机达到制冷目的的。制冷系统内制冷剂的低压蒸汽被压缩机吸入并压缩为高压蒸汽后排至冷凝器。同时轴流风扇吸入的室外空气流经冷凝器,带走制冷剂放出的热量,使高压制冷剂蒸汽凝结为高压液体。高压液体经过过滤器、节流机构后喷入蒸发器,并在相应的低压下蒸发,吸取周围的热量。同时贯流风扇使空气不断进入蒸发器的肋片间进行热交换,并将放热后变冷的空气送向室内。如此室内空气不断循环流动,达到降低温度的目的。而压缩机的核心部件就是电动机。 电动机从发明之日起,一个多世纪以来,对人类社会的发展产生了极大的推动作用,大大提高了社会生产力水平,至今仍在整个社会机器大生产时代发挥着极为重要的作用。 科技的发展总是带动社会的变革,从而推动整个人类社会的发展。今天,我们仍然要大力发展科学技术,使有益于社会向更好的方向发展的科技成果更快、更好地应用于社会生产中,更大程度地促进社会的发展。 艾驰商城是国内最专业的MRO 工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上
周铁英超声电机的发展与展望
超声电机的发展与展望 周铁英陈宇 (清华大学物理系, 北京 100084) 1 引言和回顾 超声电机是利用压电材料的逆压电效应制成的新型驱动器。它由定子、转子以及施加预 压力的机构等部件构成。把超声频交变电压加在压电陶瓷上可以在定子表面产生超声振动, 通过定子与转子之间的摩擦力驱动转子运动[1-2]。超声电机是多学科交叉的学科,它集超声学、振动学、材料学、摩擦学、电子学和控制科学为一体,需要众多领域合作研究。与电磁 电机相比,超声电机的主要特点包括:1、大力矩低转速,不需减速机构;2、能量密度大, 可达电磁电机的3-10倍;3、响应速度快,仅ms量级;4、定位精度高;5、无电磁干扰;6、因靠摩擦驱动,具有自锁功能。 国际上第一个超声电机的发明专利是1942 年美国人Williams 和Brown 申请的,该专 利1948年授权[3]。1982年日本成功地开发出行波型超声波电动机, 仅在5至7年之后,佳 能、新生等几家日本公司就把超声波电动机推向市场,其中相机和打印机最为成熟。近期FUKOKU、ASUMO、精工仪器、佳能精机、京瓷、奥林巴斯光学工业、MITSUBA,SIGMAPHOTO(适马镜头)等单位都引入了超声电机的研发。图1是1998年日本超声电机 投放市场的分布图[4],其中照相机和工业机械的市场占有率为88.2%,医疗器械 5.9%,汽 车电器3.6%。 1.5 0.7 3.6 5.9 照相机 工业机器 22.6 医疗器械 汽车 住宅设备 65.6 其他 图1 1998年日本超声电机投放市场的分布图 如图1所示,日本用于照相机调焦的主要超声电机是佳能使用的行波型和摇头型,有数 百个专利,基本形成市场的垄断。现在, 除了日本之外, 美国、德国、法国、瑞士、韩国、 土耳其、新加坡等都有超声电机产品进入市场。美国的一些著名大学, 如Stanford、Wisconsin、Berkeley、Penn. State等都投入很多力量研究超声电机。美国国防部门也投入很多人力物力 从事超声电机的研究。美国某些公司生产的超声电机产品已经在航空航天、半导体工业、MEMS、和BioMEMS等领域先后得到应用。 中国的产业化进程相对缓慢。我国超声波电动机的研究是从80 年代末、90 年代初开 始的,大致经历了跟踪学习、自主开发、实际应用推广3个发展时期。1985年到1991年间,国内学者开始撰写文章介绍超声波电动机[5,6],1989 年清华大学和上海大学分别研究开 发出了压电蠕动型超声波致动器,哈尔滨船舶工程学院研制了环形超声电机[7,8],1993年
超声波电机介绍及其应用
超声波电机介绍及其应用 一、超声波电机的工作原理 超声学科结合的新技术。超声电机不像传统的电机那样,利用电磁的交叉力来获得其运动和力矩。超声电机则是利用压电陶瓷的逆压电效应和超声振动来获得其运动和力矩的,将材料的微观变形通过机械共振放大和摩擦耦合转换成转子的宏观运动。 二、超声波电机的产生 20 世纪90 年代日本佳能公司研制出一种压电电动机,这种电动机的工作原理是利用逆压电效应把电能转换成机械能。常见的压电电机也是由定子和转子组成,但定子是由压电材料和金属材料组合制成,转子是由金属材料制成;压电材料把电能转换成机械振动能,激励定子金属体振动;转子与定子相接触,通过摩擦力,定子的振动驱动转子运动。由于定子的振动频率一般在大于20kHz 的超声频段,因此人们也将压电电机称为超声电机。 三、超声波电机的特点 (1)超声电机可以得到较低转速,因此输出力矩较大,可以省去减速机构直接带动负载。(2)因为超声电机不使用电磁场作为驱动力,因此电磁辐射小。许多情况下,不希望有电机产生强电磁干扰,或者在强磁场环境中,电磁电机的正常工作会受到影响,而超声电机不需要做太多的电磁屏蔽处理就可以在这些条件下工作。 (3)超声电机依靠定、转子之间的接触摩擦作为驱动方式,关闭电源后转子就会马上停止,并在摩擦力的作用下固定不动 (4)超声电机的响应时间较短,一般在十几毫秒以内。(5)超声电机没有电磁线圈,可以不用铜材,节省原料造价。(6)超声电机的转速可以通过改变驱动频率进行调节,比较灵活。(7)超声电机在很小尺寸上都可以有效工作。 四、超声电机的分类 (1)环形行波超声波电机。 在弹性体内产生单向的行波,利用行波表面质点的振动来传递能量,属连续驱动方式,其基础理论和应用技术均较成熟。 (2)小型柱体摇摆型超声波电机 目前行波型超声波电机已有较成熟的设计方法,但该型电机在小直径(小于20mm)条件下,输出性能逐渐失去低速大扭矩的特点,而且由于其结构的限制,效率也很难提高。而柱体摇摆型超声波电机采用兰杰文振子结构,机械效率高。进一步设计可实现多个不同模态之间的耦合、叠加,从而形成三自由度椭圆运动,实现一个定子驱动多自由度的运动。摇摆型超声波电机是靠圆柱定子端部的摇头振动并通过摩擦来驱动转子,所以定子的直径越小,摇头振动的幅值越大,小型化(一般直径小于20mn)能更加显示出这种电机的优越性。由于该电机采用兰杰文结构,压电陶瓷不需粘接,其装配工艺容易实现自动化。所以这种电机特别适宜对电机的重量、体积、性能等方面有特殊要求的应用场合,如精密光学仪器、导弹导引头的跟随控制装置。摇摆型超声波电机的这些特点近年来在超声波电机领域备受关注。因此该型超声波电机的研究将改变超声波电机工作及运行机理,拓展开发新型超声波电机的思路。(3)步进超声波电机 随着超声波电机技术的日趋完善,应用领域越来越多。但在超声波电机角位移控制系统中,必须引入传感器来进行反馈,形成闭环控制系统,这样使电机结构变得复杂。自校正超声波电机能在一定角度内,自行修正其角位移累积误差,从而省略了传感器以及与传感器相匹配的闭环时序电路,达到简化结构和保障精度的目的。因此,对步进超声波电机的研究具有重要的学术价值,在精密控制等领域具有广泛的应用前景。
常见电动机分类及原理
一、原理 1、基本原理:通电导线在磁场中会受到力的作用。 2、方向判定:力左电右:左手定则,摊开左手,使大拇指与其余四指垂直且在同一平面内,让磁感线垂直穿过手心,四指指向电流方向,则大拇指所指为导体受力方向;右手定则,摊开右手,使大拇指与其余四指垂直且在同一平面内,让大拇指指向导体运动方向,则其余四指所指为感应电流方向。 二、分类 1、按工作电源分类:直流电动机 交流电动机:单相交流电动机、三相交流电动机 2、按结构原理分类:异步电动机 同步电动机(转子转速与磁场转速是否同步) 3、按用途分类:驱动用电动机 控制用电动机:步进电动机(开环控制)、伺服电动机(闭环控制,更精确) 4、按转子结构分类:鼠笼型电动机 绕线型电动机 三、直流电动机 1、分类 A、按励磁方式(主磁场):永磁励磁电动机 电磁励磁电动机:他励,主绕组与电枢绕组分别供电 自励:并励,串励,复励 B、按有无电刷:有刷直流电动机 无刷直流电动机:永磁体转动,不同于有刷的机械换向,无刷采用电子换向,控制器件通过控制输入定子线圈中的电流来产生旋转磁场。 2、原理: 有刷直流电动机产品转子结构图
四、单相交流电动机 1、分类:分类口诀:单相电机分三种,分类方式看起动 分相起动第一种,分相又分电阻和电容 电容裂相分三类,起动、运行、双电容 罩极起动第二种,凸极隐极两类型 串励起动第三种,交流直流都可用 2、电容分相起动单相电机:定子中有主副两根绕组,主绕组较粗,电阻一般为几欧,副绕组较细,电阻一般十几欧到几十欧。主绕组与副绕组在空间上呈九十度,且因为负绕组支路
中电容的作用,两绕组上的电流在相位上相差九十度,以此来产生一个旋转磁场起动电机。转子为鼠笼式。 结构图 电路图 不断开是为了提高功率因数,增加转矩,但最佳运行电容往往不是最佳起动电容,所以有下面的双电容形式。
超声波电机介绍及其发展前景
河北科技师范学院欧美学院科研技能训练---综述 学生:寇鹏 学号: 9310080215 专业:电气工程及其自动化 欧美学院机电科学与工程系 2011年7月
超声波电机介绍及其应用 寇鹏 (河北科技师范学院电气工程及其自动化专业) 摘要:超声波电机与传统的电磁式电机不同,它是利用压电陶瓷的逆压电效应,将超声振动作为动力源的一种新型电机,它由振动部分和移动部分所组成,造振动部分和移动部分之间的摩擦力来驱动。近二十年来,由于大功率压电陶瓷材料研究的突破,在全世界掀起了超声波电机研究的高潮,相继开发出多种型式的超声波电机。关键词:超声波电机/特点/分类/应用/振动源的产生 一、超声波电机的工作原理 超声电机技术是振动学、波动学、摩擦学、动态设计、电力电子、自动控制、新材料和新工艺等学科结合的新技术。超声电机不像传统的电机那样,利用电磁的交叉力来获得其运动和力矩。超声电机则是利用压电陶瓷的逆压电效应和超声振动来获得其运动和力矩的,将材料的微观变形通过机械共振放大和摩擦耦合转换成转子的宏观运动。 二、超声波电机的产生 20 世纪90 年代日本佳能公司研制出一种压电电动机,这种电动机的工作原理是利用逆压电效应把电能转换成机械能。常见的压电电机也是由定子和转子组成,但定子是由压电材料和金属材料组合制成,转子是由金属材料制成;压电材料把电能转换成机械振动能,激励定子金属体振动;转子与定子相接触,通过摩擦力,定子的振动驱动转子运动。由于定子的振动频率一般在大于20kHz 的超声频段,因此人们也将压电电机称为超声电机。 三、超声波电机的特点 (1)超声电机可以得到较低转速,因此输出力矩较大,可以省去减速机构直接带动负载。 (2)因为超声电机不使用电磁场作为驱动力,因此电磁辐射小。许多情况下,不希望有电机产生强电磁干扰,或者在强磁场环境中,电磁电机的正常工作会受到影响,而超声电机不需要做太多的电磁屏蔽处理就可以在这些条件下工作。 (3)超声电机依靠定、转子之间的接触摩擦作为驱动方式,关闭电源后转子就会马上停止,并在摩擦力的作用下固定不动 (4)超声电机的响应时间较短,一般在十几毫秒以内。 (5)超声电机没有电磁线圈,可以不用铜材,节省原料造价。 (6)超声电机的转速可以通过改变驱动频率进行调节,比较灵活。 (7)超声电机在很小尺寸上都可以有效工作。 四、超声电机的分类 (1)环形行波超声波电机。 在弹性体内产生单向的行波,利用行波表面质点的振动来传递能量,属连续驱动方式,其基础理论和应用技术均较成熟。 (2)小型柱体摇摆型超声波电机 目前行波型超声波电机已有较成熟的设计方法,但该型电机在小直径(小于20mm)条件下,输出性能逐渐失去低速大扭矩的特点,而且由于其结构的限制,效率也很难提高。而柱体摇摆型超声波电机采用兰杰文振子结构,机械效率高。进一步设计可实现多个不同模态之间的耦合、叠加,从而形成三自
_超声电机技术与应用_
? 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved. https://www.360docs.net/doc/2516332188.html, 书评 《超声电机技术与应用》 赵淳生 (南京航空航天大学超声电机研究中心,江苏南京210016) 超声电机是在20世纪80年代迅速发展起来的、基于压电效应和超声振动的一种新型微电机。它突破了传统的电磁效应电机原理,具有力矩/质量比大,结构紧凑,低速大扭矩,响应快,电磁兼容性和控制性能好等突出优点;并已在机器人、精密仪器仪表、医疗器械、航空航天及新型武器装备等领域得到广泛的应用。超声电机理论、方法、制作、应用都取得极大进展,研究和应用成果丰富,但系统的论述和表达尚不多见。 《超声电机技术与应用》一书较系统地讨论了超声电机的进展和成果,特别是总结了作者及其科研团队从事超声电机技术研究10多年来的成果,许多成果都来自于亲自的实验。本书具有以下几个特点: (1)从超声电机所涉及的基本振动理论和波动理论出发,在超声电机的运动机理、机电耦合动力学模型、结构参数优化设计、驱动与控制技术等方面提出了系统的理论和设计方法。 (2)将振动理论中的一些现代分析方法和技术引入到超声电机机电耦合系统建模和优化设计中,如动态子结构法、结构动力修改技术以及模态识别和分离技术等。 (3)揭示了超声电机研制中的许多关键技术,提出了相应解决的办法。如提出了一种有效的自动频率跟踪技术,解决了超声电机转速随温度升高而下降的难题;提出了应用于行波超声电机的“反共振点+恒流驱动”的论点,提高了超声电机的综合性能;提出了一种用于行波超声电机的压电陶瓷元件极化分区新方案,既简化了极化工艺,又提高了超声电机的效率等。 (4)该书特别重视实验研究及结果分析,这正体现了作者及其科研团队重视实验的传统。该团队自行研制或与有关单位合作研制、建立了一系列超声电机试验设备试验装置,提出了一整套关于超声电机零部件和整机的试验方法,并对各种新型超声电机进行了大量的试验研究,这在该书中多有体现。 (5)该书还特别注重理论联系实际。不仅提出了系统的理论和方法,而且在工程应用方面所做的大量研究工作也有表述,如以超声电机为执行器的定位和恒速的多变量(速度、频率和相位)控制技术的研究,包括把超声电机应用于二元机翼颤振抑制、核磁共振注射器、视觉目标的自动跟踪及机器人等。许多来自应用的研究和成果甚至可直接移植借鉴,尤其是试验数据和图表值得借鉴。 本书共566页,于2007年9月北京科学出版社出版。本书共分16章,第1章绪论,简要地叙述了超声电机技术的发展、特点和分类,以及国内外的应用概况。第2、3章提供了超声电机在设计和试验中所必须的振动理论。第4章扼要介绍了机械摩擦和摩擦材料。第5章对压电效应及压电材料作了扼要阐述,强调压电材料的特性对超声电机的影响,并提供了一些选取和制备超声电机所需要的压电材料的知识。第6~12章分别叙述了圆板式行波型、杆式行波型、纵扭复合型、直线型、步进型、非接触型、离合器耦合型、表面波型等超声电机运动机理、动力学模型、结构优化设计方法及其试验研究。第13、14章论述超声电机驱动与控制技术。第15章详细地介绍超声电机所必须进行的各种试验,包括试验原理、试验方法、试验装置以及对试验结果的分析。第16章在介绍目前国内外超声电机应用情况的基础上,展望了未来的应用前景。 本书是我国目前较全面和系统地论述超声电机技术及其应用的不可多得的著作。本书除有丰富的学术内容外,著者在写作方面严肃认真。愿意向从事超声电机或作动器,特别是精密工程或精密驱动等的科研、设计工程技术人员及高等院校相关专业的硕士、博士研究生推荐。
爱克森超声波电机公司创业计划
爱克森超声波电机公司创业计划 第一部分概述 1.1背景 大势所趋 ?日本有关专家预言:21世纪将是超声波电机广泛应用的时代。 ?早在1994年,美国有关研究报告预计:在不远的将来,超声波电机将取代全部的小型传统电机。 性能卓越 超声波电机突破了传统的电磁电动机的概念,性能卓越。 ?靠摩擦力驱动,因而断电后具有自锁功能,不需要制动装置; ?转矩密度大,低速下可产生大转矩,不需要齿轮减速机构,因而体积小,重量轻,响应速度快; ?控制精度高,直接控制精度达纳米级; ?勿需润滑,不产生也不接受电磁干扰,噪声低。 应用广泛 ?汽车专用电器; ?办公自动化设备;
?工业控制系统; ?精密仪器仪表; ?航空航天; ?智能机器人…… 商机无限 ?在上述应用领域内,现有电机存在很多不尽人意之处;?超声波电机是电机发展的新概念,将逐渐取代传统的小型电机; ?国内目前尚无超声波电机生产厂家,属国内首创,市场潜力巨大。 世界上有些最先进的技术是买不来的,我们有能力、有基础赶上世界超声波电机的发展步伐,跟踪这一世界先进科技前沿,大力发展我国的技术,迅速缩小与日本超声波电机技术的差距,尽快开拓国内超声波电机应用市场,继而打入国际市场。 1.2公司 国内首家致力于超声波电机研究、开发与生产的公司──爱克森超声波电机公司的创建,标志着中国在超声波电机技术的商业化应用上迈出了坚实的一步。
爱克森超声波电机公司由华中理工大学的五名本科生创建,公司依靠华中理工大学在超声波电机研究方面的先进技术,并将联合国内其它研究单位,发展中国的超声波电机产业!公司前期产品主要应用于汽车电器,并将积极开发其它领域用超声波电机。 我们的发展目标是:在五年的时间内,形成以轿车用超声波电机为龙头的技术产业,同时积极开发其它领域用系列产品,领导国内微特电机的新潮流。 1. 3产品 工作原理:超声波电机(Ultrasonic Motor, 简称USM )利用压电陶瓷的逆压电效应和超声振动,将弹性材料(压电陶瓷,PZT )的微观变形通过共振放大和摩擦耦合转换成转子或滑块的宏观运动。 主要材料:压电陶瓷环、粘结剂、摩擦材料及一些硬金属。 产品优势:由于独特的运行机理,超声波电机具有传统电磁式电机不可比拟的优势,完全可以取代传统的小型电机。 应用领域:公司产品将首先定位于汽车电器,并进一步 图
步进电机工作原理特点及应用
步进电机工作原理,特点及应用 - 步进电机工作原理,特点及应用 一、前言 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。仅仅处于一种盲目的仿制阶段。这就给户在产品选型、使用中造成许多麻烦。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。 二、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。 0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B
与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。 不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。 3、力矩: 这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力F与(dФ/dθ)成正比 S
步进电机的种类、结构及工作原理
步进电机的种类、结构及工作原理 步进式伺服驱动系统是典型的开环控制系统。在此系统中,执行元件是步进电机。它受驱动控制线路的控制,将代表进给脉冲的电平信号直接变换为具有一定方向、大小和速度的机械转角位移,并通过齿轮和丝杠带动工作台移动。由于该系统没有反馈检测环节,它的精度较差,速度也受到步进电机性能的限制。但它的结构和控制简单、容易调整,故在速度和精度要求不太高的场合具有一定的使用价值。 1.步进电机的种类 步进电机的分类方式很多,常见的分类方式有按产生力矩的原理、按输出力矩的大小以及按定子和转子的数量进行分类等。根据不同的分类方式,可将步进电机分为多种类型,如表5-1所示。 表5-1 步进电机的分类 2.步进电机的结构
目前,我国使用的步进电机多为反应式步进电机。在反应式步进电机中,有轴向分相和径向分相两种,如表5--1所述。 图5--2是一典型的单定子、径向分相、反应式伺服步进电机的结构原理图。它与普通电机一样,分为定子和转子两部分,其中定子又分为定子铁心和定子绕组。定子铁心由电工钢片叠压而成,其形状如图中所示。定子绕组是绕置在定子铁心6个均匀分布的齿上的线圈,在直径方向上相对的两个齿上的线圈串联在一起,构成一相控制绕组。图5--2所示的步进电机可构成三相控制绕组,故也称三相步进电机。若任一相绕组通电,便形成一组定子磁极,其方向即图中所示的NS极。在定子的每个磁极上,即定子铁心上的每个齿上又开了5个小齿,齿槽等宽,齿间夹角为9°,转子上没有绕组,只有均匀分布的40个小齿,齿槽也是等宽的,齿间夹角也是9°,与磁极上的小齿一致。此外,三相定子磁极上的小齿在空间位置上依次错开1/3齿距,如图5--3所示。当A相磁极上的小齿与转子上的小齿对齐时,B相磁极上的齿刚好超前(或滞后)转子齿1/3齿距角,C相磁极齿超前(或滞后)转子齿2/3齿距角。 图5-2 单定子径向分相反应式伺服步进电机结构原理图
专用超声波电机驱动电路研究
专用超声波电机驱动电路研究 专用超声波电机驱动电路研究分类号TP271.4—533(1)UDC密级公开编号中国工程物理研究院专用超声波电机驱动电路研究指导教师姓名文贵印研究员申请学位级别工学硕士专业名称通信与信息系统论文提交日期2005.3.15论文答辩日期2005.4.28学位授予单位和日期中国工程物理研究院答辩委员会主席2005年3月15日专用超声波电机驱动电路研究摘要超声波电机(UltrasonicMotor简称USM)是一种新型的微特电机,有别于传统的电磁电机。在本文引言中,说明了USM与传统电磁电机相比的主要优点、基本组成及应用前景,同时说明了开展专用USM的驱动电路研究工作的背景及主要工作内容,作者要完成设计、样品加工及应用三部分工作等,此论文就是这三部分研究工作的总结。首先,根据对驱动电路的要求,结合国内外传统压电马达驱动电路的系统方案,设计出专用超声波电机的驱动电路的系统方案。在本方案中增加了位置检测与归零单元,去掉了频率跟踪单元,采用DSP作为控制单元,整合了电机驱动信号产生、电机选择与启动、位置检测信号处理和特殊信号译码等功能,有利于电路小型化和稳定性。方案具有新颖和独特性。其次,详细介绍了利用仿
真与实际调试相结合的方法,完成了推挽逆变电路及升压 脉冲变压器的工程设计和调试,着重解决了浪涌及功率开关管保护等问题,注意了变压器绕制工艺与漏感的关系。采用DSP芯片实现了多种控制和软、硬件结合,给出了用C语言编写的程序,重点解决了程序的调试与抗干扰问题。采用独特的数字编码方法,实现了位置检测的结构设计,完成了性能初步调试以及与DSP组成闭环系统,消除电机 不断步进引起的空间位置上的积累误差,实现了电机步进误差归零的技术要求。设计了电路工程板图,完成了样机两台的加工和调试工作,与超声波电机进行了匹配调试实验,重点解决了阻抗匹配问题,达到了驱动电路的设计指标,实现了设计、加工、匹配调试三部分工作的基本要求。最后,根据前一段工作,提出了一些今后工作的意见,特别是工程应用化与集成化方面的研究想法。关键词:超声波电机,驱动电路,DSP,脉冲变压器,位置检测与归零专用超声波宅机驱动电路研究AbstractUltras onicMotor(USM),asanewtypemicro—motorisdifferentfromtheconventionalelectrom agneticmotor.Intheintroduction,USM’sadvantagescomparedtheconventionalelectrom