lidWorksFlowSimulation全局旋转与局部旋转的应用
lidWorksFlowSimulation全局旋转与局部旋转的应用
发表时间:2014-10-9 作者: 周洲来源: 互联网
关键字: SolidWorks Flow Simulation全局旋转局部旋转
本文介绍了以离心泵和CPU散热器仿真分析为例,介绍了在运用SolidWorks Flow Simulation进行旋转设置的过程中,设置全局旋转或局部旋转的具体步骤和方法。
当我们在SolidWorks Flow Simulation遇到有旋转的情况时,我们会考虑设置全局旋转或局部旋转。设置全局旋转时,所有组件均参与旋转;而设置局部旋转时,只有包括在旋转区域内的组件参与旋转,那这两种情况该如何设置呢?请看下文的实例:
离心泵:
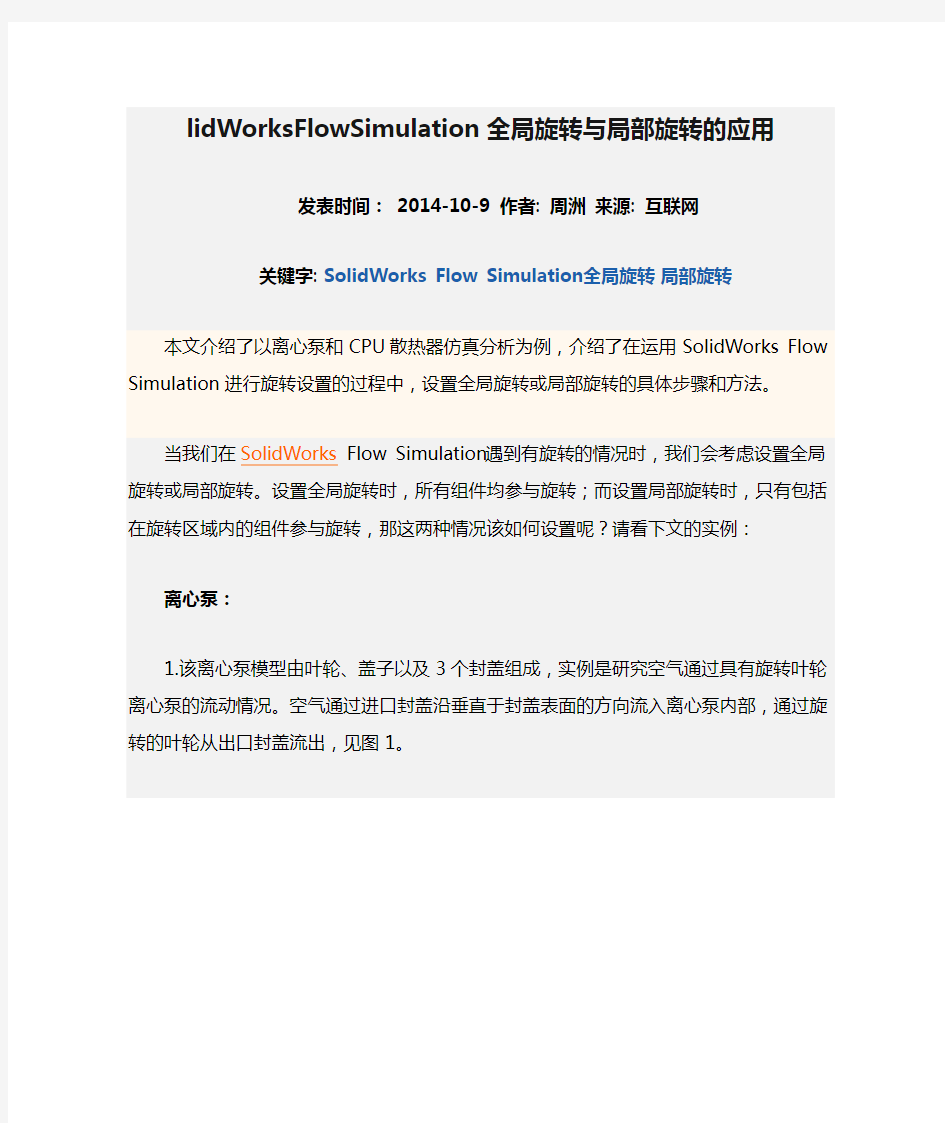
1.该离心泵模型由叶轮、盖子以及3个封盖组成,实例是研究空气通过具有旋转叶轮离心泵的流动情况。空气通过进口封盖沿垂直于封盖表面的方向流入离心泵内部,通过旋转的叶轮从出口封盖流出,见图1。
图1 离心泵模型
2.通过向导设定分析类型为内部流动,旋转类型为全局旋转,参考轴为Z轴,角速度为
-209.43951rad/s(2000rpm)。见图2:
图2 向导设定分析类型
3.插入进口封盖的边界条件为入口体积流量0.3m3/s,出口封盖的边界条件为环境压力。见图3:
图3 插入进口封盖的边界条件
4.该离心泵只有叶轮转动,而其余组件不参与旋转,因此需要将这些组件视为“定子”的真实壁面。选择插入边界条件,在打开的属性管理器中,选择盖子,在类型下选择“壁面”,设置为“真实壁面”,勾选“定子”。在全局旋转下,不参与旋转的组件必须视为“定子”。如图4所示:
图4 设置不参与旋转的组件为“定子”的真实壁面5.计算结果,如图5所示:
图5 计算结果
CPU散热器:
1.该CPU散热器模型由风扇、散热片、卡座、风扇附件等组成,实例是研究散热器冷却CPU 芯片的情况。通过一定转速转动的风扇带动CPU芯片周围的空气流动,通过散热片来降低CPU 芯片温度,见图6。
图6 CPU散热器模型
2.通过向导设定分析类型为外部流动,旋转类型为局部旋转,勾选固体内热传导。见图7:
图8 局部旋转区域设置需注意的细节
4.插入旋转区域,选择将风扇完全包裹住的组件(Rotation Region),角速度为-460.766923 rad/s (4400rpm)。见图9:
图9 插入旋转区域
5.该散热器中只有风扇转动,而其余组件不参与旋转,因此需要将与局部旋转区域相交的面或组件视为“定子”的真实壁面。选择插入边界条件,在打开的属性管理器中,选择卡座与旋转区域相交的面以及风扇附件,在类型下选择“壁面”,设置为“真实壁面”,勾选“定子”。在局部旋转下,不参与旋转的面或组件必须视为“定子”。如图10所示:
图10 将与局部旋转区域相交的面或组件视为“定子”的真实壁面
6.计算结果,如图11、12所示:
图11 速度计算结果
图12 温度结果
图7 导设定分析类型
3.局部旋转区域设置需注意的细节,红色区域为局部旋转区域。见图8。
旋转导向钻井技术新进展
旋转导向钻井技术新进展 旋转导向系统(RSS)是在钻柱旋转钻进时,随钻实时完成导向功能的一种导向式钻井系统,是20世纪90年代以来定向钻井技术的重大变革。RSS钻进时具有摩阻与扭阻小、钻速高、成本低、建井周期短、井眼轨迹平滑、易调控并可延长水平段长度等特点,被认为是现代导向钻井技术的发展方向。 在RSS出现以前,多采用由泥浆马达驱动的滑动导向钻井系统实施导向钻井。该系统的特点是在钻井过程中钻柱不旋转,而是沿井壁轴向滑动,并通过滑动导向工具改变井眼的井斜角和方位角,从而控制井眼轨迹。旋转导向系统与滑动导向钻井系统相比,具有钻速快、井眼质量高、降低压差卡钻风险、可清洁井眼等优点。 旋转导向系统按其导向方式可分为推靠钻头式(Push the Bit)和指向钻头式(Point the Bit)两种系统。下面将通过对市场上最新型RSS系统的介绍,展示旋转导向钻井技术的进展。 1. AutoTrak X-treme系统 AutoTrak X-treme系统是由井下钻井马达驱动的旋转导向系统。其最大的优势是将普通转盘式RSS最高250rpm的转速提高到400rpm。该系统由旋转闭环导向系统Auto Trac和高效钻井马达X-treme组合而成。其特殊设计的模块化结构可以允许BHA持续高速旋转,而X-treme马达的设计也解决了导向数据通过马达传输的问题,真正实现了精确、实时的近钻头导向。 2. Revolution RSS Revolution旋转导向系统是一种“指向”式的旋转导向系统,导向的主要组件为不可旋转的套筒稳定器、近钻头旋转稳定器和旋转传动轴(drive shaft)。地面导航设施接收到泥浆脉冲传输的LWD信号后确定偏移方向和偏移角度,使传动轴产生偏移。传动轴在套筒稳定器中运转,将扭矩和载荷传递至钻头,“指引”钻头向既定方向前进。近钻头旋转稳定器起到支点的作用。 3. 3D旋转导向系统——Pathfinder RSS Pathfinder 3D旋转导向系统实现了在冲蚀井眼中的定向钻进。一般的旋转导向工具依靠与井壁的直接接触来施加导向力,或者通过这种接触来维持导向部件的稳定。Pathfinder RSS 采用特殊设计的导向垫块最多可以伸长1in,使121/4in的井眼工具在13in的井眼中仍能与井壁接触。 4. PowerDrive系统 PowerDrive旋转导向系统是通过高速旋转同时导向来进行钻进的,然而高速旋转下的定位比较困难。斯伦贝谢公司的PowerDrive采用了在RSS内部安装不旋转组件的方法解决该问题,因其外部钻杆始终处于旋转状态而大大提高了钻速。“让每个接触井壁的部分都在转动”的思想是斯伦贝谢旋转导向系统的核心,也是优于其它RSS系统的根
斯伦贝谢旋转导向系统 Power-V 使用介绍
斯伦贝谢旋转导向系统Power-V 使用介绍 1 Power-V 简介和应用范围 Power-V是斯伦贝谢旋转导向系统PowerDrive家族中的一员。所谓旋转导向系统,是指让钻柱在旋转钻进过程中实现过去只有传统泥浆马达才能实现的准确增斜、稳斜、降斜或者纠方位功能,但相对于泥浆马达,PowerDrive有非常明显的优点。 旋转导向系统广泛用于使用泥浆马达进行滑动钻进时比较困难的深井、大斜度井、大位移井、水平井、分枝井(包括鱼刺井),以及易发生粘卡的情况。 2 旋转导向系统PowerDrive的优点 ⑴反映和降低了所钻井段的真正狗腿度,使井眼更加平滑。用泥浆马达打30m井段,滑动钻进15m,转动钻进15m,井斜角增加4°,得到平均狗腿度4°/30m。实际上,转钻15m井斜角几乎没有变化,这15m的实际狗腿度是零;而4°的井斜角变化是由滑钻15m产生的,这15m的实际狗腿度是 8°/30m。而用Power-V在同一设置下打出的每米都是同样均匀和平滑的,减少了井眼轨迹的不均匀度,从而减少了在起下钻和钻进过程中钻具实际所受的拉力和扭矩,减少了以后下套管和起下完井管串的难度。 ⑵使用Power-V钻出的井径很规则。使用传统泥浆马达在滑动井段的井径扩大很多,而转动井段的井径基本不扩大。这种井径的忽大忽小是井下事故的隐患,也不利于固井时水泥量的计算。 ⑶由于Power-V钻具组合中的所有部分都在不停的旋转,大大降低了卡钻的机会。使用传统泥浆马达在滑动钻进时除钻头外,其它钻具始终贴在下井壁上,容易造成卡钻。 ⑷在钻进过程中,由于Power-V组合中的所有钻具都在旋转,这有利于岩屑的搬移,大大减少了形成岩屑床的机会,从而更好的清洁井眼。这对于大斜度井、大位移井、水平井意义很大。 ⑸由于Power-V钻具组合一直在旋转,特别有利于水平井、大斜度井和3000m以下深井中钻压的传递,可以使用更高的钻压和转盘转速,有利于提高机械钻速。使用泥浆马达在大井斜的长裸眼段滑动钻进时送钻特别困难,经常是上部的钻杆已经被压弯了,而钻压还没有传递到钻头上,还常常引发随钻震击器下击,损害钻头寿命。 3 Power-V 组成部分和工作原理简介 Power-V主要有两个组成部分,它们分别是上端的Control Unit
平移_旋转_轴对称_知识点总结
旋转、平移、轴对称、中心对称知识点总结 轴对称平移旋转中心对称全等 定义一个(两个)平 面图形沿某条直 线对折能够完全 重合 平面图形在它所在 平面上的平行移动。 决定要素:平移的方 向、平移的距离 一个平面图形绕一 定点按一定的方向 旋转一定的角度的 运动。 一个图形旋转 180°能与自身 重合 能够完全重合的 两个图形 表示方法: ΔABC≌△DEF 轴对称 图形 成轴对 称 中心对 称图形 成中心 对称 全等多边形 全等三角形 对应边 对应角 一个图 形; 不止一 条对称 轴 两个图 形; 只有一 条对称 轴 旋转对称图形:一 个图形绕内部某一 点旋转一定的角度 能与自身重合。 一个图 形 两个图 形 图形 特征对应角相等,对 应边相等 ①对应点间的连线 平行且相等(或在同 一条直线上) ②对应边平行且相 等(或在同一条直线 上),对应角相等, 图形的形状和大小 不改变。 ①图形上每一点都 绕同一点按相同的 方向和角度旋转 ②对应点到旋转中 心的距离相等 ③对应边相等,对 应角相等,图形的 性状大小不改变 连结对应点的线 段必然经过对称 中心,并被对称 中心平分成相等 的两部分。 对应边相等,对应 角相等
判断方法沿着某条直线对 折看是否重合。 找平移的方向和距 离: 找一组对应点,连线 即是他平移的方向 和距离 找旋转的方向和角 度: 找一组对应点,与 旋转中心连线的夹 角 ①旋转180°能 否与自身重合 ②对应点间的连 线是否经过同一 点,并被这一点 平分 各边对应相等 各角对应相等 找对称轴:①找一 组对应点连线, 做其垂直平分 线。②找两组对应 点连线,过两条 中点的直线 找对称中心:① 找一组对应点连 线找其中点 ②两组对应点连 线的交点 画法 ①找关键点 ②过每个关键点 做对称轴的垂线 截取与之相等的 距离,标出对应 点 ③连接对应点。 ①找关键点 ②过每个关键点做 平移方向的平行线 截取与之相等的距 离,标出对应点 ③连接对应点。 ①找关键点 ②连接关键点与旋 转中心,将这条线 段按方向和角度旋 转,标出对应点 ③连接对应点。 ①找关键点 ②连接关键点与 对称中心,延长 并截取相等的长 度,标出对应点 ③连接对应点。 重要结论①线段是轴对称 图形,对称轴是 它的垂直平分 线。 ②角是轴对称图 形,对称轴是它 的角平分线。 ③垂直平分线的 性质:垂直平分 线上任意一点到 线段两端的距离 相等。④角平分 线的性质:角平 分线上任意一点 到叫两边的距离 相等。⑤对称轴 垂直平分对称点 间的连线。 ①多次平移相当于 一次平移 ②两条对称轴平行 时,两次轴对称相当 于一次平移 ①线段旋转90°后 与原来的位置垂直 ②两条对称轴相交 时,两次轴对称相 当于一次旋转。 ①中心对称一定 是旋转对称,旋 转对称不一定是 中心对称。 ②任何通过中心 对称图形的对称 中心的直线都将 这个图形分成面 积相等的两部 分。 ③两条对称轴互 相垂直时,两次 轴对称相当于一 次中心对称 ①一个图形经过 轴对称、平移或选 转等变换得到的 新图形一定与原 图形全等 ②两个全等的图 形总能经过轴对 称、平移或旋转等 变换后重合。
轴对称、平移与旋转单元测试题
轴对称、平移与旋转单元测试题
1 .如 果 一 个 图 形 沿 着 一 条 直 线 对 折 ,两 侧 的 图 形 能 够 完 全 重 合 ,这 样 的 图 形 就 叫( 图形,那条直线就是( )。 2. 正 方 形 有 ( )条对称轴. 3. 移 一 移 , 说 一 说 . )
( 1 )向( )平 移 了( )格( 2 )向( )平 移 了( )格( 3 )向( )平 移 了 ( ) 格 4. 长 方 形 有 条 对 称 轴 , 圆 有 条 对 称 轴 , 正 方 形 有 ( )条对称轴. A.1 B.2 C.3 D.4 E.无 数. 5 . 你 能 画 出 如 图 所 示 图 形 所 有 的 对 称 轴 吗 ? 如 果 能 ,请 画 出 来 ,并 填 在( )里 填 上适当的数.
三、解答题(共 1 小题,满分 9 分) 6.请画出对称图形的另一半.
1
四、判断对错.(8 分) 7. 正 方 形 是 轴 对 称 图 形 , 它 有 4 条 对 称 轴 ( )。 8. 圆 不 是 轴 对 称 图 形 ( )。 9. 利 用 平 移 、 对 称 可 以 设 计 许 多 美 丽 的 图 案 ( )。 10 . 风 吹 动 的 小 风 车 是 平 移 现 象 ( )。 五、用心选.(6 分) 11.下面的图形中, ( )不能由 通过平移或旋转得到.
A.
B.
C.
D.
12 . 下 列 现 象 中 , 不 属 于 平 移 的 是 ( ) A. 乘 直 升 电 梯 从 一 楼 上 到 二 楼 B. 钟 表 的 指 针 嘀 嗒 嘀 嗒 地 走 C. 火 车 在 笔 直 的 轨 道 上 行 驶 D. 汽 车 在 平 坦 笔 直 的 公 路 上 行 驶 13 . 下 面 的 图 形 中 , 不 是 轴 对 称 图 形 的 是 ( ) A. 长 方 形 B. 等 腰 三 角 形 C. 平 行 四 边 形 D. 扇 形 六、(8 分) 14 . 下 面 图 案 是 从 哪 张 纸 上 剪 下 来 的 ? 请 连 线 .
五、画一画.(6 分) 15 . ( 1 ) 房 子 向 右 平 移 5 格 , ( 2) 小 船 向 下 平 移 4 格 , 再 向 左 5 格 .
八、计算. 16 . 用 简 便 方 法 计 算 , 写 出 主 要 计 算 过 程 . ( 1 ) 2.12 × 2.7+7.18 × 2.7
2
( 2 ) 1.25 × 0.25 × 3.2
旋转导向钻井技术介绍
旋转导向钻井技术介绍 引言 近十几年来,水平井、大位移井、多分支井等复杂结构井和“海油陆采”的迅速发展。为了节约开发成本和提高石油产量,对那些受地理位置限制或开发后期的油田,通常通过开发深井、超深井、大位移井和长距离水平井来实现,进而造成复杂结构的井不断增多。目前通行的滑动钻井技术已经不能满足现代钻井的需要。于是,自20世纪80年代后期,国际上开始加强对旋转导向钻井技术的研究;到90年代初期,旋转导向钻井技术已呈现商业化。国外钻井实践证明,在水平井、大位移井、大斜度井、三维多目标井中推广应用旋转导向钻井技术,既提高了钻井速度,也减少了钻井事故,从而降低了钻井成本。旋转导向钻井技术是现代导向钻井技术的发展方向。 旋转导向钻井技术 旋转导向钻井法是在用转盘旋转钻柱钻井时随钻实时完成导向功能。钻进时的摩阻与扭阻小、钻速高、钻头进尺多、钻井时效高、建井周期短、井身轨迹平滑易调控。此外,其极限井深可达15 km,钻井成本低。旋转导向钻井技术的核心是旋转自动导向钻井统,如图1所示。它主要由地面监控系统、地面与井下双向传输通讯系统和井下旋转自动导向钻井系统3部分组成。 1、地面监控系统 旋转导向钻井系统的地面监控系统包括信号接收和传输子系统及地面计算存储分析模拟系统,有的还具有智能决策支持系统。旋转导向钻井系统的主要功能通过闭环信息流监视并随钻调控井身轨迹,其关键技术是从地面发送到井下的下行控制指令系统。 2、地面与井下双向传输通讯系统 目前已提出的信号传输方式有4种,即钻井液脉冲、绝缘导线、电磁波和声波。通过比较分析,笔者发现这4种传输方式各有优缺点和应用局限,如表1所示。
3、井下旋转自动导向钻井系统 井下旋转自动导向钻井系统是旋转自动导向系统的核心,它主要由3部分构成,即测量系统、导向机构、CPU和控制系统。 (1)测量系统测量系统主要用于监测井眼轨迹的井斜、方位及地层情况等基本参数,使钻井过程中井下地质参数、钻井参数和井眼参数能够实时测量、传输、分析和控制。它经历了随钻测量(MWD)、随钻测井(LWD)、随钻地震(SWD)、随钻地层评价测试技术(FEMWD)和地质导向技术(GST)几个阶段。 (2)导向机构导向机构代表了目前导向技术的先进水平。按原理不同,导向机构原理可分为: ①导向力原理。推力式(或称偏置式)旋转导向工具和指向式旋转导向工具。推力式旋转导向工具是通过侧向力推靠钻头来改变钻头的井斜和方位。而指向式旋转导向工具是预先定向给钻头一个角位移,通过为钻头提供一个与井眼轴线不一致的倾角来使钻头定向造斜。 ②控制原理。可变径稳定器式旋转导向工具和调制式旋转导向工具。前者是先通过电磁阀调节在伸缩块上的液压,以使导向力矢量满足所需导向目标;再通过定向控制系统进行方位与井斜的控制(图2)。而后者是通过调节涡轮发电机负载电流改变涡轮发电机绕组回路阻抗,以使携带高强度永磁铁的涡轮叶片与稳定平台内的扭矩线圈耦合产生不同的电磁转矩和加速度,进而使旋转换向阀保持一个相对于井壁的固定角度,即工具面角,最终实现控制轴在受控状态下的运动状态改变(图3)。 ③套筒旋转与否原理。全旋转导向工具和不旋转套筒旋转导向工具。全旋转导向工具与井壁动态接触,其旋转控制阀在垂直井段随钻柱一起旋转。不旋转套筒旋转导向工具与井壁静态接触,其外套不随钻柱旋转。
旋转导向系统再深层页岩有水平井的应用
旋转导向系统再深层页岩有水平井的应用 摘要:在全世界范围之内,页岩油非常规油气资源开发的重要领域,水平井是页岩油勘探与开发采用的主要技术之一。为解决钻井过程中轨迹控制、高压、近距离防碰、托压以及目的层段无任何实钻和测试参考资料等问题,根据方位伽马探测原理,建立了三地层数学模型,结合随钻测井曲线提出了“标志层地层倾角计算方法”并推导出相关公式。采用了旋转导向钻井系统与地质导向技术相结合对井眼轨迹进行控制,现场应用结果表明,应用旋转导向钻井系统可实时监测井底环空压力、提高机械钻速、实现自动导向控制和地层评价、通过标志层地层倾角提前预测目的层“着陆”点井斜及钻头到边界的距离,使井眼轨迹光滑并精准中靶,优化了井身结构并完善了地质导向模型,对后期页岩油开发提供了新的参考资料和策略。 关键词:旋转导向系统;再深层页岩有水平井;应用 引言 旋转导向系统代表着石油钻井仪器的最高水平,尤其适用于高难度井,它对于提升钻井质量和钻井速度都有显著效果。目前成熟的产品有斯伦贝谢的PowerDrive,贝克休斯的AutoTrak,以及哈里伯顿的GeoPilot等系列产品。国内目前没有成熟产品,都属于研制阶段。旋转导向系统按导向方式可分为两大类:推靠式、指向式。国内对推靠式的研究居多。推靠式旋转导向系统的工作原理是调节钻井仪器上液压装置的推力,从而给钻头提供侧向力,控制钻头往设定的方向钻进,达到调整井斜角和方位角并控制井眼轨迹的目的。 1旋转导向钻井工具系统的信息传输原理 第一,在完成地面控制命令之后,进行数据资源的向下传输,保证井下信息接受的准确性;第二,信号下传系统不会影响钻井的正常工作;第三,系统在运用中具有较高的准确性、稳定性。在钻井作业的使用中,使用传统的通讯方法难以适用钻井环境。在钻井系统信号下传方法比较中,不同方法存在着优劣势的差异性,具体如下:在旋转导向钻井系统使用过程中,需要向地面发送控制指令,在以往信息传输的过程中,存在着数据量相对较小,而且,通讯速度要求不严格等问题。在旋转导向钻井系统使用中,需要考虑系统运用的可靠性、经济性等技术操作特点,实现钻井液脉冲信号下传方法的科学运用。 2旋转导向系统再深层页岩有水平井的应用 2.1地质环境特点与钻井工程 某井区夹持在小集断层与小集南断层之间,为西高东低的断块构造,地层东倾。目的层孔二段为深灰、黑灰色泥岩夹浅灰色粉细砂岩,细粒长英沉积岩及白云岩薄互层构成,烃源岩发育优质,是主要生油凹陷主体。利于孔二段自生自储形成页岩油。主体区,Ek21发育70~80m细粒沉积岩,分布稳定,具备较好的储集性能,储集空间以晶间孔、页理缝为主,其次为粒间(内)溶蚀孔、构造微裂缝、生物体腔孔等,脆性矿物含量高达90%以上,利于后期压裂改造。 2.2具体应用 为精确控制井眼轨迹,一开、二开使用MWD+马达组合,使得上直段井斜控制在2°以内,井深2950~3085m,井斜控制1.5°以内,从3085m开始造斜。基于上述施工难度,三开从3080~5465m使用旋转导向工具,见表1。轨迹控制分为造斜段和水平段。 表1 全井使用工具及参数
旋转导向技术应用情况及发展趋势探究
旋转导向技术应用情况及发展趋势探究 发表时间:2019-12-16T14:32:47.847Z 来源:《科学与技术》2019年第14期作者:张猛[导读] 随着现代导向钻井技术在油气勘探领域中的广泛应用, [摘要]:随着现代导向钻井技术在油气勘探领域中的广泛应用,有必要探索研究该技术的最新进展及发展方向。本文首先概述了导向钻井技术,其次分析了现代导向钻井技术的最新进展,最后指出了现代导向钻井技术的发展方向,旨在能够推动我国钻井事业的进一步发展。 [关键词]:旋转导向钻井进展发展 一引言 近十几年来,水平井、大位移井、多分支井等复杂结构井和“海油陆采”的迅速发展。为了节约开发成本和提高石油产量,对那些受地理位置限制或开发后期的油田,通常通过开发深井、超深井、大位移井和长距离水平井来实现,进而造成复杂结构的井不断增多。目前通行的滑动钻井技术已经不能满足现代钻井的需要。于是,自20世纪80年代后期,国际上开始加强对旋转导向钻井技术的研究;到90年代初期,旋转导向钻井技术已呈现商业化。旋转导向钻井技术是现代导向钻井技术的发展方向。二旋转导向技术的系统组成及原理 2.1 旋转导向系统组成 井下旋转导向钻井工具系统、地面监控系统和随钻测量系统是组成旋转导向钻井系统的三部分。不同的部门功能不同,导向装置、无磁模块稳定器、双向通讯模块、动力模块等井下工具是组成井下旋转导向钻井工具系统的核心部件。旋转(地质)导向二维建模、底部钻具组合受力分析、定向井水平井剖面设计或修正设计是地面监控系统的功能,监控旋转导向钻井系统的定向钻井情况是地面监控系统的主要功能。感知钻井过程中钻头的环境是随钻测量系统的主要目的。各种传感器是实现感知钻井过程中钻头环境的主要途径,传感器模块、优化旋转密度仪和动态与压力模块等随钻地质特性和钻具特性测量工具包含在其中。总的来说,导向装置、传感器模块、双向通讯和动力模块、模块马达以及其他配套工具是旋转导向钻具组合的主要组成部分。2.2 旋转导向工作原理 导向装置是旋转导向钻具组合的重要部分,根据给定工具面和给定动力进行导向钻进,并且通过下传的指令可以随时重新定位,既可以造斜也可以稳斜。传感器模块包括伽马射线和多频电阻率,主要提供钻井过程所需的基本参数,一般还安装有用来计算井眼方位角磁通量计。涡轮发电装置和正压脉冲发生器作为双向通讯和动力模块主要部件,随钻测量工具提供的电源动力和导向装置是他们主要负责的,而且也提供了渠道用于下传指令和上传测量数据。有效提高机械钻速同时还可以减少套管和钻具的磨损是使用模块马达的优点。具有技术密集、高投资、高风险和高难度特点的钻井工程是石油天然气勘探开发的主要手段和关键环节。旋转导向钻井技术随着定向井、水平井的大规模应用必将得到广泛使用。它的优点是能在旋转状态下实现井眼轨迹的实时导向。三旋转导向技术应用情况 旋转导向钻井技术研究成果代表着一个国家钻井技术领域的水平,是一个国家综合国力的又一种表现形式。美国的旋转导向钻井技术主要是以斯伦贝谢的研究结果最为前沿,他发明的旋转导向钻井技术能够实现在直油井段以及水平段的石油开采的高产能。我国的旋转导向钻井技术在经过大量的人力物力的投资后,终于也到了丰收的时候,川庆钻探研究开发并具有自主知识产权的CGSTEER—01旋转导向钻井技术在2013 年开始了现场试验,这标志着我国的旋转导向钻井技术取得了巨大的进展,在我国石油油气开采开发研究工作中具有里程碑般的意义。 我国的旋转导向钻井技术具有以下几个优秀的特点:建造成本低,建造周期短,便于石油行业的工作人员操作,尤其在石油油气的水平段的开采产能极高,为我国以后对于超深石油油藏和大位移油藏的开采提供了必要的技术援助。我国对旋转导向钻井技术的现场试验工作是以三口井的开采为试验对象。第一个实验对象于井下986 m 处放入旋转导向钻井技术设备;第二个试验对象在井下1 356 m 处放入旋转导向钻井技术设备;第三实验对象是对旋转导向钻井技术设备的钻井速度的量化制。由实验发现,第一个实验对象经过试验测试发现使用旋转导向钻井技术可以很好地控制钻井的倾斜问题,倾斜度数小于0.3。第二个实验对象在井下1 356 m处连续钻探多次,发现每次获得的钻井参数未有变化。第三个实验对象的钻井速度设定为23 m/h,经实验发现在钻探过程中钻井速度未发生变化,并且比使用常规的钻井开采系统开采效率提升了90% 多。在本次的现场试验中,还进行了垂直模式和稳定模式下的钻井试验,对实验结果进行分析,发现旋转导向钻井技术在垂直模式和稳定模式中连续作业且作业总长度超过1000 m 的情况下,钻井的倾斜仍然小于0.4°,旋转导向钻井技术很好地控制了石油开采过程中钻井的倾斜问题。本次的现场试验使用了精确的实时传输监控,保证了试验的准确性,在旋转导向钻井技术现场试验时,于钻头0.4m 处和4 m 处分别安放了井斜传感器和伽马仪,完成对试验数据的准确测量和实时传输。经过旋转导向钻井技术的现场实验还发现了许多实际应用的经验,如由于旋转导向钻井技术对于钻压等方面无严格要求,使得设备的维修维护时间大大减少,提高作业效率;并且发现在设备上安置低速直螺杆可以有效地提高钻井的速度。 四旋转导向技术发展趋势 我们应该加强随钻地质导向钻井技术的研究力度和投资力度,通过相关的井下地质评价仪器和地质导向工具在钻井施工过程中获得地层污染之前的数据和参数,保障地质评价结果更加的真实、准确、可靠。随钻地质导向技术的不断发展和进步,有效的降低了钻井施工成本,提高了钻井施工效率,为我国的油气田开发和探勘做出了巨大的贡献。因此整个钻井施工中的关键就是对地层压力进行测试,才能保障钻井施工过程的安全、顺利进行。 我国日后的重点研究方向和研究力度就是对随钻地层测试技术的研究和创新。我国的国土面积幅员辽阔,油气资源区分布比较广泛,随钻地层测试技术在未来的应用会变得越来越广泛,我们需要不断的加强随钻地质导向技术的自主研发,才能真正的拥有属于我们自己的随钻地质导向技术,打破国外先进国家对该技术的垄断,不断的加强我国自主的随钻地质导向技术的研究和开发。参考文献 [1] 杨勇. 旋转导向钻井技术的应用研究与进展[J].山东工业技术,2017,(02):114. [2] 邓元洲. 旋转导向钻井技术应用研究及其进展[J].化工管理,2016,(16):161.
平移、旋转和轴对称的秘密
平移、旋转与轴对称的秘密 平移、旋转和轴对称都是平面图形的基本变换.他们之间存在着许多有意思的秘密,这秘密究竟是什么呢? 在一次关于图形变换的考试中,记得有这样一题: 如右图,请说出甲树是怎样由乙树变换得到的____________________. 许多同学都写出了错误的答案:乙向右平移AB 的距离,带绕点A 顺时针旋转30°等到甲。为什么会造成这种错误呢?首先,同学们没有仔细观察这个两棵树的特征或不明白平移、旋转和轴对称的意义。 一、平移变换转化为轴对称变换 如下图,已知△ABC ,直线l ∥k 且距离为a ,画△ABC 关于直线m 对称的△A ′B ′C ′,再画△A ′B ′C ′关于直线n 对称的△A ″B ″C ″。 60° 90°
那么△A″B″C″能否看成△ABC平移得到的呢? 事实证明这是可以的,即△ABC沿对称轴l(k)垂直方向平移2a个单位即可得到 △A″B″C″。 由此我们就可以得出一般结论:当对称轴平行时,两次轴对称相当于一次平移,且平移的方向垂直于对称轴,平移的距离是两条对称轴之间的距离的2倍。 二、旋转转化为轴对称变换 如下图,已知△ABC,直线l,k相交于点O,且夹角为a(0°<a≤90°),画△ABC 关于直线l对称的△A′B′C′。再画△A′B′C′,关于直线k对称的△A″B″C″。 观察图形,我们就可以发现△A″B″C″就是由△ABC绕点O顺时针旋转2a°得到的。 由此可猜想归纳一般结论:当两条对称轴相交于一点时,两次轴对称相当于一次旋转,且旋转中心为对称轴的交点,旋转角为对称轴夹角2a°,旋转方向与第一条对称轴旋转a的角度得到第二条对称轴的位置的方向一致。 数学中像这样的秘密还有很多,只是你还没有打开你智慧的窗口去感受它们,多去留意它们,你就会探索的路上收获丰硕的果实。
静态推靠式旋转导向钻井工具防自锁设计方法
收稿日期:2017-02-17 基金项目:国家自然科学基金项目(51674284);国家科技重大专项(2016ZX05022-002) 作者简介:史玉才(1972-),男,副教授,博士,研究方向为定向钻井理论与技术三E-mial:shiyucai2008@https://www.360docs.net/doc/279066308.html,三 文章编号:1673-5005(2017)05-0080-07 doi:10.3969/j.issn.1673-5005.2017.05.009静态推靠式旋转导向钻井工具防自锁设计方法 史玉才1,孙海芳2,岳步江3,管志川1,王 恒1,苗在强1 (1.中国石油大学石油工程学院,山东青岛266580;2.中国石油川庆钻探钻采工程技术研究院,四川广汉618300;3.航天科工惯性技术有限公司,北京100074) 摘要:基于静态推靠式旋转导向(SRS)钻井工具的结构和工作原理,建立SRS 钻井工具受力分析模型,给出防止导向翼肋自锁的倒角优化设计方法三结合实例分析井底实际钻压随导向翼肋前倒角变化,以及前倒角上限随导向翼肋推靠力和名义钻压上限变化三结果表明:导向翼肋与井壁台阶是否自锁与导向翼肋倒角设计二钻井参数(推靠力二钻压)及井壁摩擦系数有关;井底实际钻压随导向翼肋前倒角增加而迅速减小;前倒角上限随推靠力之和增大而减小二随名义钻压上限增大而增大二随侧倒角增大而略有减小;对于Φ216mm 井眼中使用的SRS 钻井工具,推荐导向翼肋前倒角45?左右,侧倒角45?~60?,侧倒角较大时还应适当减小前倒角三 关键词:旋转导向钻井系统;静态推靠式;受力分析;自锁;倒角;优化设计 中图分类号:TE 122.14 文献标志码:A 引用格式:史玉才,孙海芳,岳步江,等.静态推靠式旋转导向钻井工具防自锁设计方法[J].中国石油大学学报(自然科学版),2017,41(5):80-86.SHI Yucai,SUN Haifang,YUE Bujiang,et al.A design method to prevent self-locking of a static push-the-bit rotary steer-able drilling tool[J].Journal of China University of Petroleum(Edition of Natural Science),2017,41(5):80-86. A design method to prevent self-locking of a static push-the-bit rotary steerable drilling tool SHI Yucai 1,SUN Haifang 2,YUE Bujiang 3,GUAN Zhichuan 1,WANG Heng 1,MIAO Zaiqing 1 (1.School of Petroleum Engineering in China University of Petroleum ,Qingdao 266580,China ;2.Drilling &Production Technology Research Institute of Chuanqing Drilling Company Limited ,PetroChina ,Guanghan 618300,China ; 3.Aerospace Science and Industry Inertial Technology Company Limited ,Beijing 100074,China )Abstract :In this study,according to the structure and working principle of a static push-the-bit rotary steerable (SRS)drilling tool,analytical models of the loading condition and force balance of the SRS drilling tool have been figured out,and a method to optimize the front chamfer design was established,which can prevent the self-locking risk of SRS system effec-tively.In a case study,the variations of the actual weight-on-bit (WOB)due to the front chamfer,the variations of the front chamfer due to the total pushing forces and the maximum nominal WOB were analyzed.The results show that whether the steerable pads run into a self-locking state against the ladders on wellbore wall is dependent on the front chamfers,the drill-ing parameters (i.e.the total pushing force and weight-on-bit)and the friction coefficient.The actual WOB decreases with the front chamfer quickly.The maximum front chamfer decreases with the total pushing force sharply,but it increases with the maximum nominal WOB rapidly,and decreases with the side chamfer slightly.For the SRS drilling tool in a Φ216mm wellbore,the recommended front chamfer is of 45?or so,and the recommended side chamfer is between 45?to 60?,and a larger side chamfer should be matched to a smaller front chamfer. Keywords :rotary steerable drilling system;static push-the-bit;force state analysis;self-locking;chamfer;optimization de-sign 2017年 第41卷 中国石油大学学报(自然科学版) Vol.41 No.5 第5期 Journal of China University of Petroleum Oct.2017 万方数据
Φ178旋转导向钻井工具机械结构设计说明书
Φ178旋转导向钻井工具机械结构设计 摘要:旋转导向钻井技术是石油工业工程技术领域的关键技术之一,得到了石油钻井工程界的极大关注,发挥着越来越重要的作用,主要应用于水平井、大位移井、超深井、三维多目标井等复杂结构的井作业。本文综述了旋转导向钻井工具的国内外现状,闸明了在我国发展旋转导向钻井技术的重要性和必要性,介绍了它的工作原理及结构组成,指出了研制该工具的主要技术特点。调制式旋转导向钻井工具的导向执行机构是靠内外泥浆液压力差驱动的原理来实现的,这是旋转导向钻井工具能否正常工作的关键。所以,对其液压盘阀分配系统进行分析计算,及其在井下不同工况下所受的力进行分析计算。分析了旋转导向钻井系统的井下钻井工具系的偏置方式和导向方式,完成了导向执行机构机械部分的设计。 关键词:旋转导向钻井工具;机械结构设计;压力差;
Φ178 Rotary Steerable Drilling Tool Mechanical Structure Design Abstract:In many oil industry engineering filed key technologies,rotary steerable drilling technology is one that has been paid much attention to in recent years and exhibits more and more importance in oil drilling industry, mainly used in horizontal well,extended reach well,ultra-deep well ,3D multi-target well the complex structure of multi-lateral wells in wells operating. This paper reviews the domestic and international drilling tool status, illustrates the development of rotary steerable drilling technology of the importance and necessity to introduce the working principle and its composition, that the development of the main technical features of the tool. Modulated rotary steerable drilling tool driven by the executing agency is the pressure difference between inside and outside the mud fluid-driven principles to achieve, which is whether the drilling tool to work the key. Therefore,its hydraulic disc distribution system analysis and calculation, and its different working conditions in underground analyzing and calculating the force. Analysis of downhole rotary steerable drilling tool drilling system orientation bias way. Complete guide the design of mechanical parts of the implementing agencies. Key words: Rotary steering drilling tool;Mechanical parts design;Pressure difference
旋转导向系统介绍
旋转导向系统介绍 一、概述 随着科学技术的发展,石油钻井的勘探仪器的信息化、自动化有了长远的进步,从20世纪80年代后期,在国际上开始研究旋转导向钻井技术,到90年代初期多家公司形成了商业化技术并最终实现了信息化和自动化钻井,旋转导向钻井技术作为目前发展的前沿钻井技术之一,代表着世界钻井技术发展的最高水平。 旋转导向钻井技术可以自动、灵活地调整井斜和方位,大大提高钻井速度和钻井安全性,精确控制井眼轨迹,完全适合目前开发特殊油藏的超深井、高难定向井、水平井、大位移井、智能井等特殊工艺井导向钻井的需要,极大的降低了石油勘探、钻井的成本。 目前该项技术主要被斯伦贝谢、贝克休斯和哈里伯顿公司所垄断,而国内旋转钻井技术仅处于初级阶段,未实现商业化。 二、系统组成 1-固定钻铤 2-悬挂脉冲器 3-电池短节 4-测斜探管 5-无磁钻铤 6-无线接收短节 7-无线发射短节 8-转换接头 9-旋转导向工具 10-钻头 旋转导向钻井系统实质上是一个井下闭环变径稳定器与测量传输仪器(MWD/LWD)联合组成的工具系统。同时配有地面—井下双向通讯系统,可根据井下传来的数据,在不起钻的情况下从地面发出指令改变井眼轨迹。 旋转自动导向闭环钻井系统包括由井下导向工具、MWD系统、地面监控系统组成,实现了全井闭环控制的双向通讯。 1. 井下导向工具 导向工具采用推靠式,外壳不旋转,三个支腿(支撑力不低于2.5t)可独立控制;导向工具采用涡轮发电机供电(功率400-500W),发电机的交流电进行整流后,一部分为导向工具主控电路供电,另一部分再逆变为交流电通过无线方式传输到外壳中的执行电路; 导向工具需要计算自身井斜及高边,以便控制支腿,停泵再开泵后,各支腿恢复到停泵前的状态; 导向工具通过无线发射短节及无线接收短节向MWD系统索取仪器的方位信息后,根据地面指令调整三个支腿的收缩状态以实现导向功能。
轴对称、平移和旋转
第十章轴对称、平移和旋转 1、生活中的轴对称 审核:七年级数学组主备:宋兴娅 1、教学目标: (1)认识轴对称的共同特征,探索它的性质,并能识别简单的轴对称图形,画出对称轴,找出对称点;理解轴对称图形和两个图形成轴对称的区别与联系。 2、教学重点: 理解轴对称图形和成轴对称的概念。 4、教学难点: 理解轴对称图形和两个图形成轴对称的区别与联系。 一、教学过程: (一)设疑自探: 阅读课本98-100页回答 1、什么是轴对称图形? 2、成轴对称的定义是什么? 3、它们有怎样的联系和区别? (二)解疑合探: 知识点一: 1、大家看课件出示的图,从中间为界分开,两边的形状有什么关系? [问题1]:这些美丽的图形来自生活,细心观察之后,你能发现这些图形有什么共同特征么?用自己的语言描述。 [问题2]:举出几个生活中具有对称特征的物体,并与同伴交流。2、请大家拿出准备好的纸和剪刀,把一张纸沿一条直线对折,用剪刀剪出一个图案,再展开,观察所剪的图案折线两侧部分有什么样的特点?(小组合作) (三):质疑再探 1.下面的数字中哪些是轴对称图形?各有几条对称轴? 0 1 2 3 4 5 6 7 8 9 2.下面的字母中哪些是轴对称图形?它们各有几条对称轴? A B C D E F G H M Q 3.你能举几个是轴对称图形的汉字吗? 4.判断下列图形是否为轴对称图形,如果是有几条对称轴? 5.探究正三角形、矩形、平行四边形、正方形、等腰梯形、圆是不是轴对称图形,如果是有几条对称轴。 知识点二: 阅读课本99页内容,观察下面两幅图有什么样的特点? 轴对称图形的基本特征是什么? 如果两个图形沿某条直线折叠后能够完全重合,那么这两个图形称成轴对称。这条直线就是对称轴。 教后反思: 1 / 101 / 10
动态指向式旋转导向钻井工具设计探讨
万方数据
万方数据
第38卷第2期李俊.等:动态指向式旋转导『;J钻井Tn设汁探讨 并对方位和倾角进行测量等。 图l全旋转导向工具稳定平台结构 旋转导向钻井工具中稳定平台的作用足保证在钻进时不受钻柱旋转的影响。而能够实现导向作用的动态稳定系统。能够同步配合旋转导向钻井系统的指令系统对导向工具面角随钻井下实时调控。3.1.2偏置机构 偏置结构由l套由几个可控制的偏心圆环组合形成,如图2。偏置结构中装有CPU检测装置、电子马达等检测与驱动元件,偏置机构中串接了1根柔性钻具,通过稳定平台计算机检测到的井斜与方位变化的信号结果。将检测到的信号输送给偏置装置中的CPU,当需要调整角度时,装置中的CPU驱动控制系统中的动力模块电子马达,在旋转导向过程中,偏置工具的偏心导致其上、下2跨钻柱发生弯曲,使钻头处钻柱的轴线和井眼轴线之间出现夹角,由于钻头的转角而实现旋转导向。 图2井下偏置导向工具结构 3.1.3导向方式 本研究采取偏置内推指向方式,如图3。工作方式为外筒内有一靠机械力使之变形弯曲的内轴迫使钻头有角位移,以使钻头定向造斜,如图4。指向式系统不需爱翼叻推靠井擘来改变方向,因此其导向效果不受地层不完整或井眼扩径的影响。从而指向式系统在软地层或扩径的井眼中比推靠式效果好。指向式系统可钻出更规则的井眼,减少螺旋和突起。能够更好地对井斜和方位进行控制。具有更长寿命,与钻头选择无关,降低卡钻和失效等风险,提供了作业上的优势。 卜 ~沙一 钻头 图3旋转导向工具偏置内推指向方式示意 图4旋转导向钻井T具系统指向方式示意 3.2设计重点、难点及解决方案 在钻井过程中,由于钻井工具处在井下高温、高压的工作环境中。有钻井液及地层流体的腐蚀;有含碎屑的钻井液在高压、高速流动时带来的冲蚀;有钻柱在高速旋转、钻头切削地层和钻井液压力波动产生的严重振动等,其工作环境和工作条件异常恶劣,给井下工具的设计带来一定的难度。针对目前旋转导向钻井工具设计现状存在的不足,提出了今后的研究方向。 3.2.1旋转导向驱动稳定平台主轴扭矩系统优化拇10]稳定平台无论在导向或稳定状态下。均需靠扭矩发生器的电磁力矩来驱动控制轴从而控制:l=具面角的位置,由于工具结构的限制。不可能在井下设计大功率离扭矩的扭矩发生器,因此扭矩的供需应达到平衡设计。过大不可能.同时也会引起较大压力损失;过小,将无法驱动控制轴,整个稳定平台中驱动扭矩是扭矩发生器所产生的扭矩,而阻力矩包括:涡轮发电机产生的电磁力矩、稳定平台主支撑轴承的摩擦阻力扭矩、涡轮发电机和扭矩发生器上2个涡轮支撑轴承的摩擦阻力扭矩、控制主轴旋转时的惯性扭矩等。因此,要求扭矩发生器所提供的扭矩必须大于上述阻力矩总和。在扭矩发生器的功率、扭矩受限的条件下,降低控制轴的阻力矩则成为工具设计的一个主攻目标。 解决方案:①轴承优选;②主轴精确制造和安装优化;③全部旋转件的惯性矩合理化优化等方面研究。 3.2.2旋转导向稳定平台主轴整体刚度 稳定平台控制轴的结构比较复杂,由多段联接而成,轴上还有2个涡轮以600~1200r/min转速旋转,它自身还以20~120 r/min的速度旋转,加之万方数据